ГОСТ 26.201.2-94
(МЭК 640-79)
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
СИСТЕМА КАМАК
ПОСЛЕДОВАТЕЛЬНАЯ МАГИСТРАЛЬ
ИНТЕРФЕЙСНОЙ СИСТЕМЫ
МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ
ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ
Минск
Предисловие
1 РАЗРАБОТАН МТК 233 «Измерительная аппаратура для основных электрических величин».
ВНЕСЕН Госстандартом Российской Федерации.
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол № 6-94 от 21 октября 1994 г.)
За принятие проголосовали:
|
Наименование государства |
Наименование национального органа по стандартизации |
|
Азербайджанская Республика |
Азгосстандарт |
|
Республика Армения |
Армгосстандарт |
|
Республика Беларусь |
Белстандарт |
|
Республика Грузия |
Грузстандарт |
|
Республика Казахстан |
Госстандарт Республики Казахстан |
|
Кыргызская Республика |
Кыргызстандарт |
|
Республика Молдова |
Молдовастандарт |
|
Российская Федерация |
Госстандарт России |
|
Республика Узбекистан |
Узгосстандарт |
|
Украина |
Госстандарт Украины |
3 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 14.09.95 № 473 государственный стандарт ГОСТ 26.201.2-94 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 июля 1996 г.
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 640-79 «Система КАМАК. Последовательная магистраль интерфейсной системы»
4 ВЗАМЕН ГОСТ 26.201.2-84
ГОСТ 26.201.2-94
(МЭК 640-79)
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
СИСТЕМА КАМАК
Последовательная магистраль
интерфейсной системы
САМАС. Serial Highway Interface System
Дата введения 1996-07-01
РАЗДЕЛ 1 ОБЩИЕ ПОЛОЖЕНИЯ
1 Область распространения
Стандарт распространяется на интерфейсную систему, называемую последовательной магистралью КАМАК. Она предназначена для использования в качестве стандартного интерфейса между рядом контрольно-измерительных приборов системы КАМАК, блоками выводов данных, блоками управления, драйверами, оборудованием обработки данных (ЭВМ) и системой коммуникаций.
Последовательная магистраль представляет собой однонаправленную замкнутую цепь для передачи сообщений байтами, к которой подключают контроллер и до 62 крейтов КАМАК в соответствии с ГОСТ 27080 или другие управляемые устройства. Магистраль передает данные и информацию управления либо в виде бит (с одной линией для данных и одной линией для битовых тактовых сигналов), либо в байтовой форме (с использованием восьми линий для данных и линии для байтового тактового сигнала). Синхронизирующая частота может достигать 5 МГц в зависимости от характеристики отдельных систем.
Контролируемые устройства представляют собой крейты КАМАК с последовательными крейт-контроллерами, которые согласуются с определенной структурой сообщений. В данном случае последовательная магистраль (МП) предназначена для дополнения магистрали ветви (МВ) в соответствии с ГОСТ 26.201.1.
Интерфейс MB не рекомендуется в случаях, когда, например, имеются большие расстояния между крейтами или требуется их более простое соединение. Однако для проведения полной операции, включая цикл магистрали крейта (МК), требуется, как правило, больше времени в последовательной магистрали, чем в параллельной магистральной ветви.
Система последовательной магистрали определяется прежде всего форматом сообщений и стандартами сигнала у входа и выхода устройств, соединенных магистралью. Взаимосвязи между устройствами могут осуществляться либо непосредственно с использованием определенных стандартных сигналов, либо с использованием иных сигнальных стандартов и типов модуляции.
Стандарт частично распространяется и на управляемые устройства, соединенные с МП, спроектированные необязательно по стандарту КАМАК или управляемые по командам КАМАК.
Последовательные крейт-контроллеры, полностью соответствующие спецификации, и устройства, согласующиеся с определенной частью полной спецификации, могут сосуществовать на магистрали без дополнительного интерфейса.
1а Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 27080-93 КАМАК. Модульная система технических средств для обработки данных.
ГОСТ 26.201.1-94 Система КАМАК. Организация многокрейтовых систем. Требования к магистрали истин и крейт-контроллеру КАМАК типа А1.
2 Назначение
Описать и дать характеристику последовательной системы КАМАК. Определить форматы сообщений и стандарты сигналов.
Настоящий стандарт является дополнением к требованиям, изложенным в ГОСТ 27080, его следует использовать совместно с указанной публикацией. Настоящий стандарт не может заменить или модифицировать ГОСТ 27080.
Настоящий стандарт:
- устанавливает обязательные требования;
- определяет рекомендуемые или предпочтительные требования;
- дает примеры допускаемой практики.
Последовательные крейт-контроллеры, приведенные в данном стандарте, не должны быть обязательно взаимозаменяемыми. Однако в приложении А изложены более четко требования к последовательному крейт-контроллеру типа L2, так что блоки, изготовленные различными предприятиями по спецификации приложения А, могут быть взаимозаменяемыми при эксплуатации.
Чтобы соответствовать данному стандарту, оборудование или система должны удовлетворять всем обязательным требованиям, включенным в данный стандарт без приложений. Если оборудование выполнено в виде вставного блока КАМАК, оно должно также удовлетворять обязательным требованиям ГОСТ 27080.
Чтобы соответствовать стандартной спецификации на последовательный крейт-контроллер типа L2, оборудование должно удовлетворять всем обязательным требованиям приложения А.
Чтобы быть совместимым с требованиями данного стандарта, оборудование: необязательно должно удовлетворять всем его требованиям, но при условии, что оно не будет влиять на работу блоков последовательного канала и последовательного крейт-контроллера (включая тип L2), как определено в данном стандарте.
Настоящий стандарт не исключает использования совместного оборудования (в вышеупомянутом смысле), даже если оно полностью не соответствует данному стандарту или не спроектировано по типу вставных блоков КАМАК.
3 Форма выражения требований
Стандарт содержит обязательные требования, рекомендации и примеры допускаемой практики.
Обязательные требования стандарта заключены в «рамку» и обычно включают слово «должны» (must).
Определения рекомендуемой или предпочтительной практики, которой рекомендуется придерживаться, если нет никаких веских причин не следовать ей, включают слово «следует» (should).
Примеры допускаемой практики обычно включает слово «может» (may) и оставляют свободу выбора разработчику или пользователю.
4 Сокращения и обозначения
В стандарте использованы следующие сокращения и условные обозначения:
А «Субадрес» (сигнал МК)*.
БВК (ACL)** Блокировка вспомогательного контроллера
В «Занято» (сигнал МК)*.
БТ (BCL)** Байтовый тактовый сигнал
С «Сброс» (сигнал МК)*.
КЗ (CBY)** Контроллер «занят».
ФТ (DSBY)** Формирование сообщения о требовании обслуживания.
DERR Задержанная ошибка.
ИСТ (DMI)** Инициирование сообщения о требовании обслуживания.
DSQ Задержанный сигнал ответа.
DSX Задержанный ответ принятой команды.
ВП (ERPT)** Внешний повтор.
ERR Бит «Ошибка».
I Сигнал «Запрет» (сигнал МК)*.
L Запрос на внимание (сигнал МК)*.
LAM Сигнал источника запроса в модуле.
МЗБ (LSB)** Наименьший значащий бит.
ИС (MI)** Идентификация типа сообщения.
БЗБ (MSB)** Наибольший значащий бит.
N Номер станции (сигнал МК)*.
NRZL Без возвращения к нулю.
MB (PH)** Магистраль ветви по ГОСТ 26.201.1
Q Ответ, сигнал состояния (сигнал канала крейта).
S Приставка перед обозначениями полей и разрядов последовательного канала.
S1 Стробирующий сигнал (сигнал канала крейта)*.
S2 То же.
SA Разряд субадреса.
ПКК (SCC)** Последовательный крейт-контроллер.
ПКК-L2 (SCC-L2)** Последовательный крейт-контроллер типа L2.
ПМ (SD)** Последовательный драйвер.
SF Бит «Функция».
SGL Обработанный запрос.
SC Разряд адреса крейта.
SGLE Сигнал от сортировщика запросов (ПСЗ) для формирования сообщения о требовании обслуживания.
ПК (SH)** Последовательная магистраль данного стандарта.
ВЗ (SLP)** Выделенный запрос.
SN Бит номера станций.
SQ Бит ответа Q.
БС (SR)** Бит состояния.
ЗТ (STIM)** Запуск таймера.
SW Бит «Запись».
SX Бит «Команда принята».
Т Системный тактовый период.
ЗД (TIMO) Задержка (тайм-аут).
X «Команда принята» (сигнал МК).
Z Сигнал «Пуск» (сигнал МК).
|
Обозначения L, М, N, Р и R (в некоторых случаях с приставкой «СС») оставлены для будущего употребления в соответствии с данным стандартом и не будут использованы, за исключением особых случаев. |
РАЗДЕЛ 2 ПРИНЦИПЫ РАБОТЫ ПОСЛЕДОВАТЕЛЬНОЙ МАГИСТРАЛИ
Данный раздел суммирует основные принципы, которые относятся ко всем устройствам, соединенным с МП. Все другие разделы этого стандарта имеют отношение к основным областям применения, в которых соединенные устройства представляют собой крейты КАМАК с последовательными крейт-контроллерами.
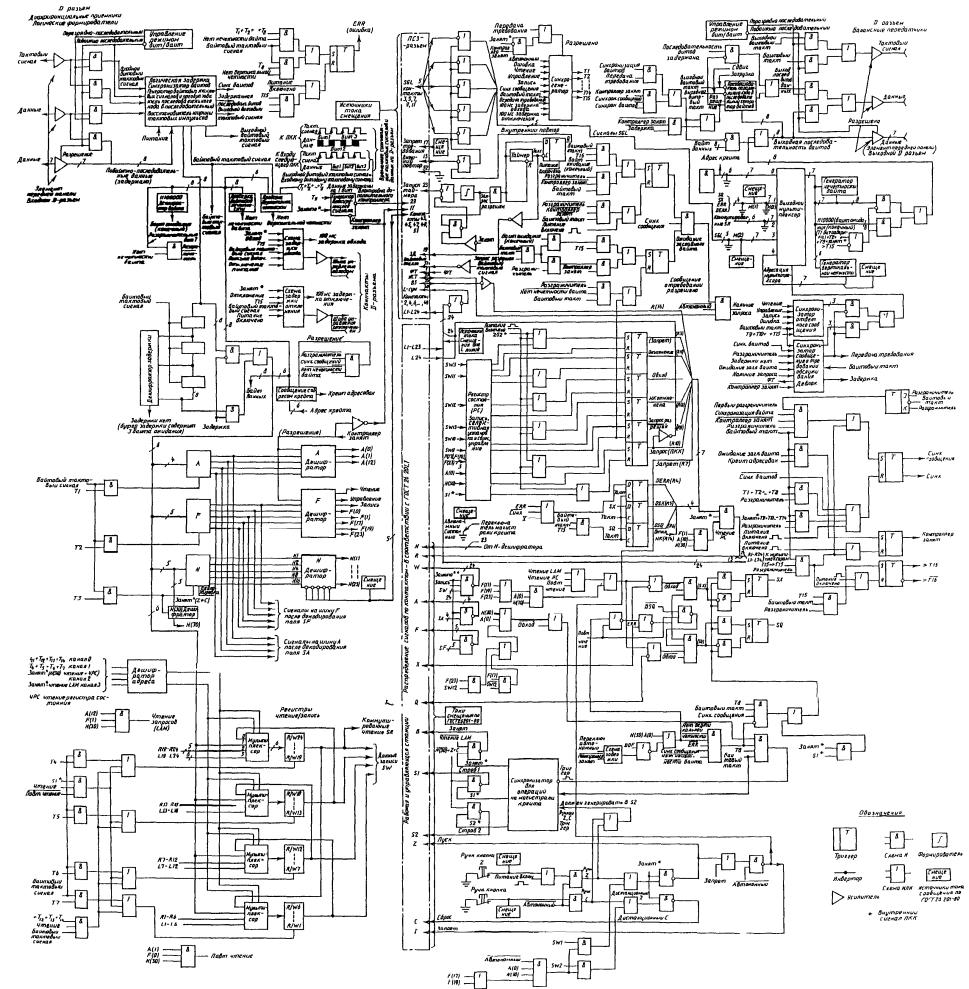
5 Конфигурация
Последовательная магистраль соединяет между собой управляющее устройство (Последовательный драйвер) и до 62 крейтов КАМАК или других управляющих устройств. Постоянно имеется только одно активное основное устройство, но стандарт не исключает систем, в которых могут работать как ведущие более одного устройства. На черт. 1 показана основная конфигурация.
Схема адресации допускает наличие максимум 62 управляемых устройств, адреса которых необязательно должны совпадать с действительной последовательностью устройств по всей магистрали.
Последовательная магистраль образует однонаправленную замкнутую цепь от выхода последовательного драйвера (ПД) через каждое управляемое устройство и обратно к входному порту ПД. При описании условий относительно определенного устройства часто бывает удобно употреблять слово «противоточный» для определения части МП между выходным портом ПД и устройством, и слово «прямоточный» для определения части между устройствами и входным портом ПД.
Конфигурация последовательной магистрали
Черт. 1
6 Сообщения
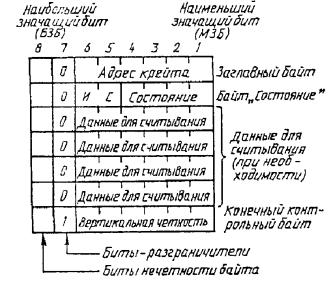
Все сообщения, передаваемые по МП, состоят из последовательности байтов, как показано на черт. 2. Вся информация, содержащаяся в сообщении, содержится в этих байтах.
Восемь разрядов, составляющих байт, обозначены от разряда 1 (наименьший значащий бит) до разряда 8 (наибольший значащий бит). Во всех байтах имеются разряды от 1 до 6, образующие информационное поле байта.
Формат сообщения
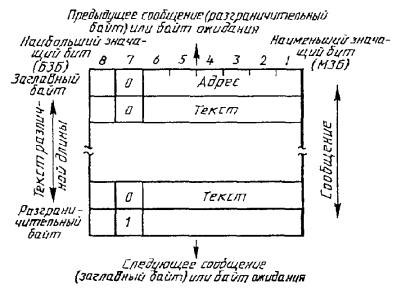
Черт. 2
Разряд 7 каждого байта является разграничительным разрядом, который позволяет приемным устройствам распознавать первый и последний байты каждого сообщения.
Разряд 8 используют в качестве контроля четности (с соответствующим значением, чтобы байт содержал нечетное количество разрядов с состоянием логической «1»). Его всегда используют в этом качестве в первом и последнем байтах сообщения и во всех байтах сообщений, связанных с последовательными контроллерами КАМАК.
Каждое сообщение начинается с заглавного байта. Он включает адрес устройства (адрес крейта в случае с последовательным контроллером). В сообщении, поступающем из ПД, заглавный байт содержит адрес позиции-назначения, в сообщении к ПД - адрес источника. Разряд 7 заглавного байта находится в логическом состоянии «0», а разряд 8 содержит признак чет-нечетности «единиц» по всему байту.
Каждое сообщение заканчивается разграничительным байтом, в котором разряд 7 находится в логическом состоянии «1», а разряд 8 содержит признак чет-нечетности «единиц».
Длина и содержание «текста» между заглавным байтом и разграничительным байтом сообщения могут быть выбраны с учетом специфики отдельного устройства. Этот текст необязательно должен быть однородным для всех устройств в системе. В каждом байте между заглавным байтом и разграничительным разряд 7 находится в логическом состоянии «0».
Если имеются какие-либо байты между разграничительным байтом одного сообщения и заглавным байтом следующего, то они также являются разграничительными байтами с разрядом 7 в логическом состоянии «1».
Таким образом, заглавный байт сообщения может быть идентифицирован, так как после одного или более байтов с разрядом 7 в состоянии логической «1» он будет первым байтом с тем же разрядом в состоянии логического «0». Аналогично может быть идентифицирован конечный байт сообщения, так как после одного или более байтов с разрядом 7 в состоянии «0» это первый байт с разрядом 7 в состоянии «1».
Обнаружение ошибок в массиве байтов, составляющих сообщение или часть сообщения, осуществляют сочетанием байтовой четности в разряде 8 каждого байта и комплектом разрядов четности по столбцам в разрядах 1-6 последнего байта массива. Этот «геометрический код обнаружения ошибок» обнаруживает все одно-, двух-, трех-, четырехразрядные ошибки и более. Схема обеспечивает хорошую защиту от групповых ошибок и легко реализуется аппаратным и математическим обеспечением.
7 Передача байтов
Байты передаются либо в поразрядно-последовательном режиме (с использованием одного информационного сигнала и сопровождающего тактового разрядного сигнала), либо в побайтно-последовательном режиме (с использованием 8 информационных сигналов и сопровождающего байтового тактового сигнала).
В поразрядно-последовательном режиме 8-разрядный байт передается, начиная с наименьшего значащего бита (разряд 1). Ему предшествует старт-бит (логическое состояние «0»), а за ним следует стоп-бит и необязательные биты-паузы (логическое состояние «1»), как показано на черт. 3. Старт-стопные биты образуют байтовый кадр, который позволяет устройствам выделить байтовый тактовый сигнал.
Байтовый кадр для поразрядно-последовательного режима
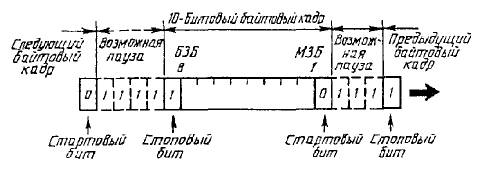
Черт. 3
В тексте настоящего стандарта комбинация двоичных знаков 8-разрядного байта с наименьшим значащим битом и наибольшим значащим битом представлена последовательностью разрядов (miiiiii1)2. Такой же байт с старт-стопными разрядами представлен последовательностью вида (1, miiiiii1, 0).
Структура сообщения и протокол последовательной магистрали идентичны в двух режимах передачи.
По всей последовательной магистрали байты передаются синхронно с байтовым тактовым сигналом, который сопровождает данные в побайтно-последовательном режиме передачи и выделяется из байтового кадра в поразрядно-последовательном режиме.
В каждом байтовом тактовом периоде каждое устройство принимает и передает один байт, но содержимое (разряды 1-8) принятых и переданных байтов не всегда идентично. Устройства обычно передают содержимое всех принятых байтов, хотя содержимое байта, полученного в одном байтовом периоде, может быть ретранслировано в более позднем байтовом периоде. Устройство может генерировать собственное сообщение посредством прерывания этого процесса ретрансляции. Содержимое необходимого количества байтов генерируется данным устройством, а содержимое соответствующего количества принятых байтов не ретранслируется. Протокол сообщений должен гарантировать, что принятые байты не содержат важной информации. Например, они могут быть байтами «пробел» или байтами «ожидания», как описано в разд. 3.
8 Системные тактовые сигналы
Системные тактовые сигналы с соответствующей частотой следования для передачи бит или байтов генерируются в одной точке системы (обычно у ПД или внутри его) и ретранслируются каждым устройством, соединенным с ПК.
Поэтому частота следования тактовых сигналов равномерна по всей системе. Абсолютная максимальная частота системных тактовых сигналов 5,0 МГц, но работа каналов связи или связанных с ними устройств может требовать более низкой частоты системных тактовых сигналов в определенных системах.
9 Порты последовательной магистрали
Характеристика последовательной магистрали (например, стандарты сигнала, синхронизация, структура сообщения и тип соединителя) определяется по отношению к портам*, через которые канал передачи данных входит и выходит из каждого соединенного с ним устройства.
* «Порт» - включение или отключение от магистрали.
В настоящем стандарте не исключается соединение устройств, выполненных по различным стандартам, или использование различных магистральных связей, применяемых между устройствами.
Все устройства, соединенные с магистралью, имеют два порта: один для входа и один для выхода. Эти порты либо соответствуют определенным данным стандартом D-портом, либо относятся к стандартным таким образом, что устройство в принципе могло бы быть соединено с D-портами через соответствующий адаптер.
У каждого D-порта формируемые информационные и тактовые сигналы являются сигналами уравновешенного типа без привязки к нулю (NRZL) и соответствуют стандарту интерфейса для цифровых сигналов с балансированным напряжением (см. разд. 7). Каждый сигнал проводится по отдельной паре линий, генерируется балансным передатчиком и принимается дифференцированным приемником.
У каждого D-порта имеется пара контактов для тактовых сигналов (для передачи с частотой битовых или байтовых тактовых сигналов) плюс восемь пар для сигналов данных (у которых только одна пара используется в поразрядно-последовательном режиме).
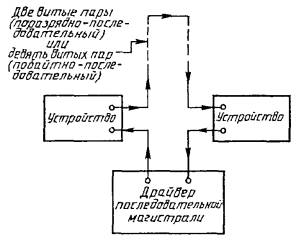
Схему подключения последовательной магистрали можно образовать непосредственным соединением выходного D-порта одного устройства с входным портом D следующего устройства (черт. 4), используя при этом специальный провод в виде витой пары с волновым сопротивлением 100 Ом. Кроме того, любая схема подключения в МП может включать узел связи, в котором стандарты сигнала и технику модуляции выбирают в целях удовлетворения всех специфических требований системы, как показано на черт. 5. В этом случае требуются преобразователи сигналов для преобразования сигналов данных и тактовых сигналов из стандарта D-порта в стандарт иного канала связи и обратно в стандарт D-порта. В контексте этого стандарта любые взаимосвязи, не использующие стандарт D-порта, являются неопределенными и описаны как стандарты U-порта. Хотя сигналы данных и тактовые сигналы передаются по отдельным парам проходов у D-порта, они могут переходить в один однонаправленный провод между U-портами, если, например, использовать соответствующую технику модуляции.
Прямое подключение устройств через D-порты
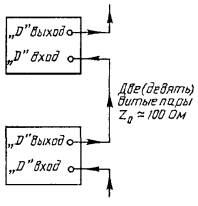
Черт. 4
Подсоединение устройств через «нестандартные» линии связи
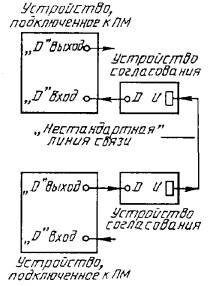
Черт. 5
В пределах системы МП для некоторых частей канала можно использовать стандарты D-порта, в то время как для других - различные стандарты U-порта, при этом, однако, частота тактовых сигналов должна быть везде одинакова. Например, группа вставляемых устройств может иметь прямые взаимосвязи между D-портами, возможно, с одним преобразователем сигнала у входа в группу и другим у выхода из группы.
10 Последовательный драйвер
Последовательный драйвер представляет собой связующее звено между МП (прямо или косвенно) ЭВМ или другим контроллером. Он состоит из передающей части, соединенной с выходным D-портом, и приемной части, соединенной с входным D-портом.
Передающая часть принимает команды и данные из ЭВМ и собирает их в соответствующий формат сообщения с заглавным и разграничительным байтами. Она передает полученный разрядный или байтовый поток в МП, сопровождаемый тактовыми сигналами со скоростью передачи битов или байтов. Она может генерировать код обнаружения ошибок в сообщениях и вставлять байты между последующими сообщениями.
Приемная часть принимает поток бит или байтов из последовательной магистрали вместе с тактовыми сигналами. Она идентифицирует формат байтов сообщения и передает информацию о запросах и состоянии в ЭВМ. Она может проверить код обнаружения ошибок, выполнять процедуры восстановления информации после ошибок и выдавать обратно в канал любые байты между сообщениями.
Последовательный драйвер реагирует на все сообщения, полученные у входного D-порта, в то время как другие устройства реагируют только на те сообщения, которые адресованы им.
Этот стандарт определяет ПД только в виде сигналов, структур сообщения и последовательности сообщений у D-порта. Многие операции, связанные с генерированием и приемом сообщений, могут проводиться либо аппаратными средствами в ПД, либо программными средствами в соответствующей ЭВМ.
Асинхронные последовательные входные схемы имеются в большинстве современных мини-ЭВМ для сопряжения с телетайпами, визуальными устройствами воспроизведения, модемами и т.д. Эти входы могут приводить в действие последовательный канал в поразрядном режиме работы через простой адаптер, что является частным случаем ПД.
11 Расширение использования последовательной магистрали
Каждое управляемое устройство, соединенное с МП, «прозрачно» для сообщений, адресованных другим устройствам независимо от внутренней структуры или длины этих сообщений. МП может таким образом иметь много различных типов совместных устройств при условии, что последние отвечают основным требованиям стандартов сигнала; он также может использовать заглавные и разграничительные байты для установления начала и конца сообщений.
Совместимые устройства, соединенные с МП, могут состоять, например, из элементов, приведенных на черт. 6:
крейты КАМАК с рекомендуемыми крейт-контроллерами типа L2, соответствующими приложению А и использующими структуры сообщений КАМАК, определенные в настоящем стандарте;
крейты КАМАК с другими крейт-контроллерами, соответствующие основной части стандарта и использующие сообщения, являющиеся вариантами или расширениями обычных сообщений КАМАК;
устройства в другом конструктивном исполнении или с другой структурой сообщений.
Подключение устройств
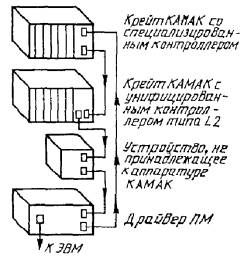
Черт. 6
12 Последовательный крейт-контроллер
При подключении крейта КАМАК к МП последовательный крейт-контроллер (ПКК) используют как связующее звено между ПК и МК. Последовательный крейт-контроллер представляет собой вставной блок КАМАК, занимающий две или более станции в крейте с соединителями для подсоединения к управляющей станции МК и, по крайней мере, к одной рабочей станции. Он имеет соединители передней панели для D-портов.
РАЗДЕЛ 3 СТРУКТУРА СООБЩЕНИЯ ДЛЯ ПОСЛЕДОВАТЕЛЬНЫХ КРЕЙТ-КОНТРОЛЛЕРОВ
Когда крейт КАМАК с последовательным крейт-контроллером (ПКК), образованным по настоящему стандарту, подсоединен к последовательной магистрали (МП), структура сообщения имеет следующие особенности.
Крейт-контроллеры используют три типа сообщений. «Командные сообщения» генерируют последовательным драйвером и приказывают адресуемому контроллеру выполнить операцию КАМАК. Адресуемый крейт-контроллер может передать в МП сокращенную форму командного сообщения. В ответ на командное сообщение адресуемый крейт-контроллер посылает «Ответное сообщение» в последовательный драйвер. Командное сообщение от драйвера к контроллеру и ответное сообщение от контроллера к драйверу составляют последовательность команда/ответ. Любой последовательный контроллер может генерировать «сообщение о требовании обслуживания», обозначающее, что на МК имеется запрос на обслуживание.
Биты в сообщениях МП отличаются от соответствующих сигналов магистрали крейта префиксом «S». Например, биты SA1-SA8 соответствуют сигналам А1-А8 магистрали крейта.
13 Командные сообщения
Командные сообщения могут быть полные или сокращенные.
13.1 Полное командное сообщение
|
Полное командное сообщение должно иметь структуру, приведенную на черт. 7, где группа байтов 5-8 включается при выполнении команды записи (SF16 = 1 и SF8 = 0), но опущена в случае команд чтения и управления. Сообщение передастся в виде последовательности байтов, начинающейся с заглавного байта (адрес крейта) и завершающейся конечным байтом. |
Командное сообщение: распределение битов
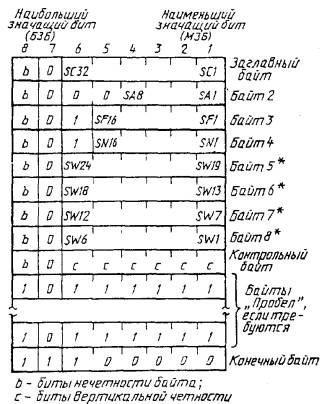
* Байты 5-8 включаются, если SF16 = 1 и SF8 = 0.
Черт. 7
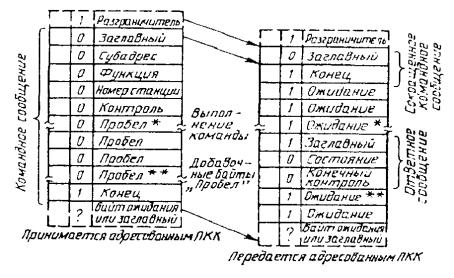
Полное сообщение в команде состоит из следующих байтов, приведенных на черт. 8: заглавного байта, в котором поле адреса крейта указывает устройство, которому предназначено сообщение; трех байтов, содержащих поля субадреса, функции и номера станции команды КАМАК; четырех байтов, содержащих данные записи из 24 бит, которые опускают, когда они не нужны и контрольный байт (SUM) (см. 17.6), который позволяет адресованному крейту обобщить, проверить и откорректировать команду КАМАК. Далее сообщение продолжают байтом «Пробел» (см. 17.7), представляя возможность ПКК передать ответ, и завершают конечным разграничительным байтом (END) (см. 17.3).
13.2 Сокращенное командное сообщение
Адресованный ПКК должен передавать сокращенную форму командного сообщения, состоящего из заглавного байта и конечного байта (END) (см. черт. 9 и 10).
14 Ответное сообщение
|
Ответное сообщение должно иметь структуру, приведенную на черт. 11, в которой группа байтов 3-6 включена в ответ на команду чтения (SF16 = 0 и SF8 = 0), но опущена в ответ на другие команды. Сообщение должно быть передано в виде последовательного ряда байтов, начиная с заглавного байта (адрес крейта) и кончая конечным контрольным байтом (END SUM). |
Командное сообщение: распределение полей

* Зарезервированные биты.
ИС - поле «идентификация типа сообщения».
Черт. 8
Сокращенное командное сообщение: распределение битов
Черт. 9
Сокращенное командное сообщение: распределение полей
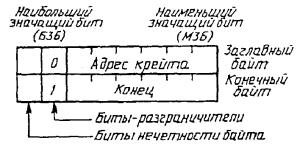
Черт. 10
Ответное сообщение: распределение битов
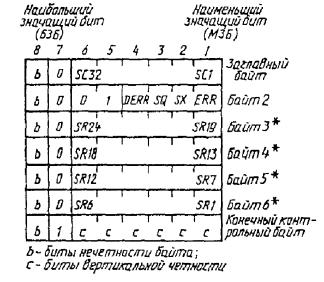
* Байты 3-6 включаются, если SF16 = 0 и SF8 = 0.
Черт. 11
Таким образом, ответное сообщение состоит из следующих байтов (черт. 12): заглавного, в котором поле адреса крейта указывает источник сообщения; байта состояния; четырех байтов, содержащих 24-разрядные данные чтения, которые при ненужности опускают, и разграничительного конечного контрольного байта (END SUM).
15 Сообщение о требовании обслуживания
|
Сообщение на запрос должно иметь структуру, приведенную на черт. 13. Сообщение передают в виде последовательного ряда байтов, начинающегося с заглавного байта (адрес крейта) и кончающегося конечным контрольным байтом. |
Таким образом, сообщение на запрос состоит из следующих байтов (черт. 14); заглавного байта, в котором поле адреса крейта указывает источник сообщения; байта идентифицирующего запрос; конечного контрольного байта (END SUM).
16 Поля сообщений
Информация, содержащаяся в командных, ответных сообщениях и в сообщениях на запрос, разделена на следующие поля:
16.1 Поле адреса крейта (6 бит; SCI-SC32)
Это поле определяет адрес назначения в командных сообщениях и адрес источника на запрос в ответных и запросных сообщениях.
|
Каждый ПКК должен ответить на любой адрес, входящий во множество 018 - 768, и не должен отвечать ни на 00, ни на 778. |
Ответное сообщение: распределение полей
ИС - поле «Идентификации типа сообщения»
Черт. 12
Сообщение о требовании обслуживания: распределение битов
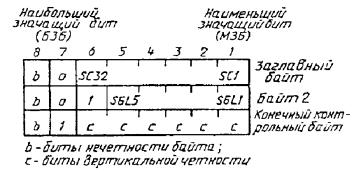
Черт. 13
Сообщение о требовании обслуживания: распределение полей
Черт. 14
Адрес 00 резервирован для использования в последовательном драйвере. При определенных условиях ошибки байт «Пробел» может быть ошибочно идентифицирован как заглавный.
Рекомендуемый байт «Пробел» имеет комбинацию значащих бит, соответствующую адресу 778. Поэтому этот адрес не используют, а применяют адреса крейта 768 (6210).
16.2 Поле номера станции (5 разрядов; SN1 - SN16)
Это поле в командном сообщении определяет номер станции внутри крейта КАМАК (см. 5.1.1 ГОСТ 27080).
Как правило, коды N (1) - N (23) употребляют в качестве адресов модулей в крейте КАМАК. Внутренняя адресация ПКК определяется кодом N (30) (см. разд. 11).
16.3 Поле субадреса (4 разряда; SA1 - SA8)
Это поле в командном сообщении определяет субадрес на выбранной станции в крейте (см. 5.1.2 ГОСТ 27080).
16.4 Поле функции (5 разрядов; SF1 - SF16)
Это поле в командном сообщении определяет операцию, которая должна быть выполнена на выбранной станции и субадресе в крейте (см. 5.1.3 МЭК 516).
Значения SF16 и SF8 в этом поле отличаются в командах чтения, записи и управления, и, следовательно, определяют, включено ли поле данных в командное или ответное сообщение. Длина командных или ответных сообщений, соответствующих различным значениям SF16 и SF8, приведена в табл. 1.
Таблица 1 - Длина цикла команда/ответ
|
Функциональное поле |
Число байтов |
||||
|
F16 |
F8 |
Команда от заглавного байта до разграничительного |
Ответ от заглавного байта до разграничительного |
Цикл команда/ответ |
|
|
Чтение |
0 |
0 |
5 |
7 |
12* |
|
Управление |
0 |
1 |
5 |
3 |
8* |
|
1 |
1 |
||||
|
Запись |
1 |
0 |
9 |
3 |
12* |
|
* Минимальная длина при условии, что заглавный байт ответа передается ПКК, как только получен байт «Пробел», а конечный контрольный байт передается, как только получен конечный байт. |
|||||
16.5 Поле записи данных (24 разряда SW1 - SW24)
Это поле включается в командное сообщение, если SF16 = 1, SF8 = 0. Оно содержит данные, связанные с командой записи.
16.6 Поле чтения (24 разряда; SR1 - SR24)
Это поле включается в ответное сообщение, если поле функций командного сообщения имеет SF16 = 0 и SF8 = 0. Оно содержит данные, запрашиваемые командой чтения.
16.7 Поле идентификации типа сообщения (2 разряда; M1 - М2)
Это поле в командных и ответных сообщениях (2 разряда) и в запросах (только М2) используют для идентификации трех типов сообщений.
|
Значение поля идентификации сообщения должно быть такое, как показано в табл. 2. |
Таблица 2 - Содержание поля идентификации сообщения
|
ИС-поле |
||
|
М2 |
M1 |
|
|
Команда |
0 |
0 |
|
Ответ |
0 |
1 |
|
Запрос |
1 |
- |
Это поле используется последовательным драйвером для различения ответных сообщений и запросов равной длины. Кроме того, его использует ПКК для идентификации командных сообщений в качестве дополнительной гарантии против ложных команд.
16.8 Поле состояния (4 разряда; ERR, SX, SQ, DERR)
Это поле в ответном сообщении показывает, как ПКК ответил на командное сообщение. Разряд ошибки (ERR) указывает, удовлетворителен ли контроль обнаружения ошибки в командном сообщении (см. 63.1).
Разряд задержанной ошибки (DERR) обеспечивает аналогичную информацию о предшествующей команде. В ответ на выполненную команду SQ- и SX-разряды указывают ответ (Q) и состояние принятой команды (X) модуля или контроллера, выбранного командой.
|
Содержимое поле состояния в ответном сообщении должно соответствовать требованиям, изложенным в разд. 46 и 63. |
16.9 Поле местонахождения источника запроса (SGL) (5 разрядов; SGL1 - SGL5).
Это поле сообщения о запросе опознает тип запроса, источник запроса или действие, необходимое по запросу. Оно может формироваться от L-сигналов на магистрали крейта любым процессом выборки, группирования, приоритетного кодирования и т.д., который выполняется крейт-контроллером или отдельным кодирующим устройством сортировки заявок, соединенным с ПКК (см. разд. 14).
Комбинация двоичных знаков (111112) должна использоваться только для указания состояния запроса (см. разд. 14).
17 Форматирующие байты
Задающие формат байты являются частью структуры сообщения, но не содержат информационные поля, как это указано в разд. 16. Они указывают конец каждого сообщения (END и END SUM), обеспечивают элемент контроля качества по столбцу геометрической схемы обнаружения ошибки (SUM и END SUM), сохраняют синхронизацию байтов в пределах сообщений (байты пробел) и между ними (байты ожидания).
Разграничительный байт должен иметь разряд 7 в логическом состоянии «1» и разряд 8 соответствующего значения для сохранения нечетности числа логических «1» в байте.
Все другие байты, не удовлетворяющие этим требованиям, являются неразграничительными байтами. Класс разграничительных байтов включает конечные байты, конечные контрольные байты и байты ожидания.
Разграничительные байты указывают последний байт каждого сообщения и образуют последовательность байтов между сообщениями. Каждое сообщение состоит из ряда неразграничительных байтов, заканчивающегося разграничительным байтом. За ним могут следовать дополнительные разграничительные байты (байты ожидания). Разграничительные байты вполне законно не могут появляться где-нибудь внутри сообщений.
Таким образом, первый байт сообщения (заглавный байт) может быть опознан по контексту как неразграничительный байт, следующий за одним или более разграничительными байтами. Последний байт сообщения опознается по его контексту как первый разграничительный байт, следующий за одним или более неразграничительными байтами.
17.2 Поле контроля четности по столбцам
Контрольные байты и конечные контрольные байты содержат поле с данными контроля четности по столбцам в разрядах 1-6. Это поле обеспечивает контроль четности по столбцам геометрической схемы обнаружения ошибки (см. разд. 61). Каждый разряд поля сохраняет четность числа логических «1» в соответствующей позиции разряда каждого байта от заглавного байта до контрольного байта или конечного контрольного байта включительно.
Содержимое поля эквивалентно сумме по модулю два предшествующих байтов сообщения, исключая разряды 7 и 8 в каждом байте (отсюда термины контрольный и конечный контрольный байты).
Конечный байт - это разграничительный байт, генерированный драйвером в целях завершения полных командных сообщений и крейт-контроллерами в целях завершения сокращенных командных сообщений.
В конечном байте разделительный разряд (разряд 7) находится в логическом состоянии «1», а разряд 8 сохраняет контроль нечетности побайтно.
|
Конечный байт с комбинацией двоичных знаков 111000002, эквивалентный значению 3408, должен быть генерирован последовательным драйвером как последний байт каждого командного сообщения. |
Несмотря на то, что конечный байт имеет такую же комбинацию двоичных знаков, что и байт ожидания (см. 17.4), он отличается расположением в контексте и требованиями, связанными с его ретрансляцией крейт-контроллерами. Конечный байт всегда следует за неразграничительным байтом.
Все неадресованные крейт-контроллеры должны ретранслировать принятые конечные байты без изменений. Адресуемый крейт-контроллер должен либо ретранслировать принятый конечный байт командного сообщения, либо заменить его конечным контрольным байтом (см. 18.4).
17.4 Байт ожидания
Байт ожидания - это разграничительный байт, генерированный последовательным драйвером и адресуемыми крейт-контроллерами. Драйвер может генерировать байты ожидания между последовательными командными сообщениями. Адресуемый крейт-контроллер генерирует байты ожидания в ответ на принятые байты между сокращенным командным сообщением (см. 13.2) и заглавным байтом ответного сообщения, а также, в случае необходимости, между конечным контрольным байтом сообщения и окончанием последовательности команда/ответ. Байт ожидания не имеет информационного поля, но относящийся к нему байтовый тактовый сигнал способствует распространению сообщений по МП. Таким образом, хотя совсем необязательно, чтобы драйвер генерировал байты в интервалах между командными сообщениями, генерация байтов ожидания желательна, так как она способствует распространению командных сообщений и позволяет закончить распространение ответных сообщений в типичном последовательном канале, включающем логические задержки.
|
Любые байты, генерированные последовательным драйвером или последовательным крейт-контроллером, в интервалах между сообщениями должны быть байтами ожидания с комбинацией двоичных знаков 111000002 (3408). |
В этой комбинации байтов разделительный разряд (бит 7) устанавливается в логическое состояние «1», разряд 8 также находится в состоянии «1» для сохранения контроля нечетности по всему байту. Поэтому байт ожидания имеет ту же самую комбинацию двоичных знаков, что и конечный байт (см. 17.3), но отличается по контексту и по условиям его ретрансляции крейт-контроллерами. Байт ожидания всегда следует за другим разграничительным байтом. При определенных условиях, связанных с генерацией запросов, допускается передача крейт-контроллером еще одного байта вместо принятого байта ожидания (см. разд. 5).
Для байта ожидания была установлена особая комбинация двоичных знаков, способствующая процессу синхронизации сообщений (см. 40.3), который обычно имеет место во время генерации драйвером последовательности байтов ожидания. Выбранная комбинация одна из нескольких, имеющих полезное свойство, когда байты ретранслируются в поразрядно-последовательном режиме, а именно: каждый байт, включающий стартовый и столовый биты, имеет только один переход от «0» к «1» и один переход от «1» до «0», способствуя тем самым установлению синхронизации байтов.
17.5 Конечный контрольный байт
Конечный контрольный байт - это разграничительный байт, генерируемый крейт-контроллером для завершения каждого ответного сообщения или запроса.
Поле данных для контроля четности по столбцам (разряды 1-6) сохраняет четность по столбцам по всем байтам между начальным байтом и конечным контрольным байтом включительно.
Разделительный разряд (разряд 7) находится в состоянии логической «1», а разряд 8 сохраняет побайтовый контроль на нечетность всего конечного контрольного байта.
17.6 Контрольный байт
Контрольный байт - неразграничительный байт, генерируемый драйвером в командном сообщении (см. черт. 7 и 8). Поле контроля четности по столбцам (разряды 1-6) этого байта сохраняет четность по столбцам по всем байтам сообщения между заглавным байтом и контрольным байтом включительно. Разделительный разряд (разряд 7) находится в состоянии логического «0», а разряд 8 сохраняет побайтовый контроль на нечетность всего контрольного байта. Адресуемый крейт-контроллер использует контрольный байт при проверке обнаружения геометрической ошибки в командном сообщении перед тем, как решить, нужно ли выполнять команду.
Байт «Пробел» - неразграничительный байт. Последовательность байтов «Пробел», генерируемая драйвером между контрольным и конечными байтами командного сообщения, образует пространство ответа. Адресуемый ПКК генерирует свое ответное сообщение вместо некоторых или всех байтов «Пробел» в пространстве ответа.
|
В байте «Пробел», генерированном последовательным драйвером, разделительный разряд (разряд 7) должен быть в состоянии логического «0», а разряд 8 должен сохранять данные о контроле на нечетность. |
Комбинация двоичных знаков байтов «Пробел», генерированная последовательным драйвером, должна быть 101111112 и эквивалентна 2778.
|
Последовательный крейт-контроллер, которому нужно принять байты «Пробел» в пространстве ответа командного сообщения, должен принять любой неразграничительный байт как замену байту «Пробел». |
Допускаемая замена байтов «Пробел» не требует рекомендуемой комбинации или сохранения нечетности по байту.
РАЗДЕЛ 4 ПОСЛЕДОВАТЕЛЬНОСТЬ СООБЩЕНИЙ КОМАНДА/ОТВЕТ
Этот раздел определяет последовательность входных и выходных байтов, возникающих, когда крейт-контроллер принимает командное сообщение, выполняет чтение, запись или управление по системе КАМАК и передает ответное сообщение. Более подробно некоторые особенности пространства ответа рассматриваются в пределах командного сообщения.
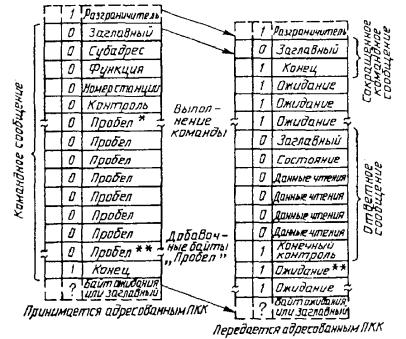
Последовательность сообщений для выполнения операции чтения, записи и управления в поразрядно-последовательном режиме приведена на черт. 15, 17 и 19 соответственно. Соответствующая последовательность сообщений в побайтно-последовательном режиме приведена на черт. 16, 18 и 20. На чертежах показана ситуация, когда ошибки в передаче и буферизация информации в ПКК отсутствует (см. разд. 25).
Последовательности сообщений команда/ответ для операций чтения, записи и управления различают только наличием или отсутствием полей данных. Для этого типа операции последовательности сообщений в поразрядно-последовательном и побайтно-последовательном режимах различаются только относительным сдвигом по времени принятых и переданных байтов в начале и конце последовательности. В поразрядно-последовательном режиме ретрансляция байтов (указанная стрелками на чертежах) обычно включает задержку только на один битовый период, в то время как в побайтно-последовательном режиме допускается задержка на один байтовый период.
Как видно из чертежей, дополнительные байты «Пробел» могут быть добавлены к пространству командного сообщения по двум причинам: имеющиеся байты «Пробел», обозначенные символом «*», дают время для выполнения команды. Минимальное число этих байтов, в принципе, равно нулю, но минимум в один байт может быть более удобным для выполнения операции. Необязательные дополнительные байты «Пробел», обозначенные символом «**», используют в одном способе контролирования длины пространства ответа (см. 23.2). Минимальное количество этих байтов равно нулю.
Последовательность обмена команда/ответ: операция чтения, поразрядно-последовательный режим
* Байты, необходимые для выполнения команды (минимальное число - 0).
** Байты, необходимые для размещения добавочных байтов «пробел» (минимальное число - 0).
Черт. 15
Последовательность обмена команда/ответ: операция чтения, побайтно-последовательный режим
* Байты, необходимые для выполнения команды (минимальное число - 0).
** Байты, необходимые для размещения добавочных байтов «пробел» (минимальное число - 0).
Черт. 16
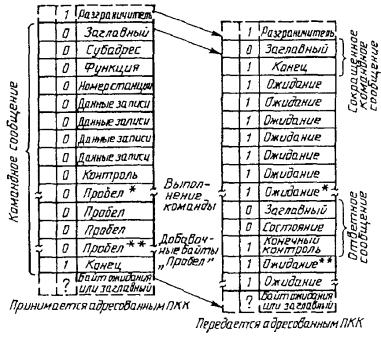
Последовательность обмена команда/ответ: операция записи, поразрядно-последовательный режим
* Байты, необходимые для выполнения команды (минимальное число - 0).
** Байты, необходимые для размещения добавочных байтов «пробел» (минимальное число - 0).
Черт. 17
Последовательность обмена команда/ответ: операция записи, побайтно-последовательный режим
* Байты, необходимые для выполнения команды (минимальное число - 0).
** Байты, необходимые для размещения добавочных байтов «пробел» (минимальное число - 0).
Черт. 18
Последовательность обмена команда/ответ: операция управления, поразрядно-последовательный режим
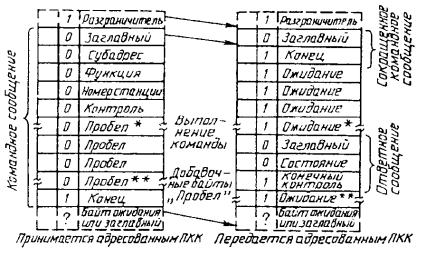
* Байты, необходимые для выполнения команды (минимальное число - 0).
** Байты, необходимые для размещения добавочных байтов «пробел» (минимальное число - 0).
Черт. 19
Последовательность обмена команда/ответ: операция управления, побайтно-последовательный режим
* Байты, необходимые для выполнения команды (минимальное число - 0).
** Байты, необходимые для размещения добавочных байтов «пробел» (минимальное число - 0).
Черт. 20
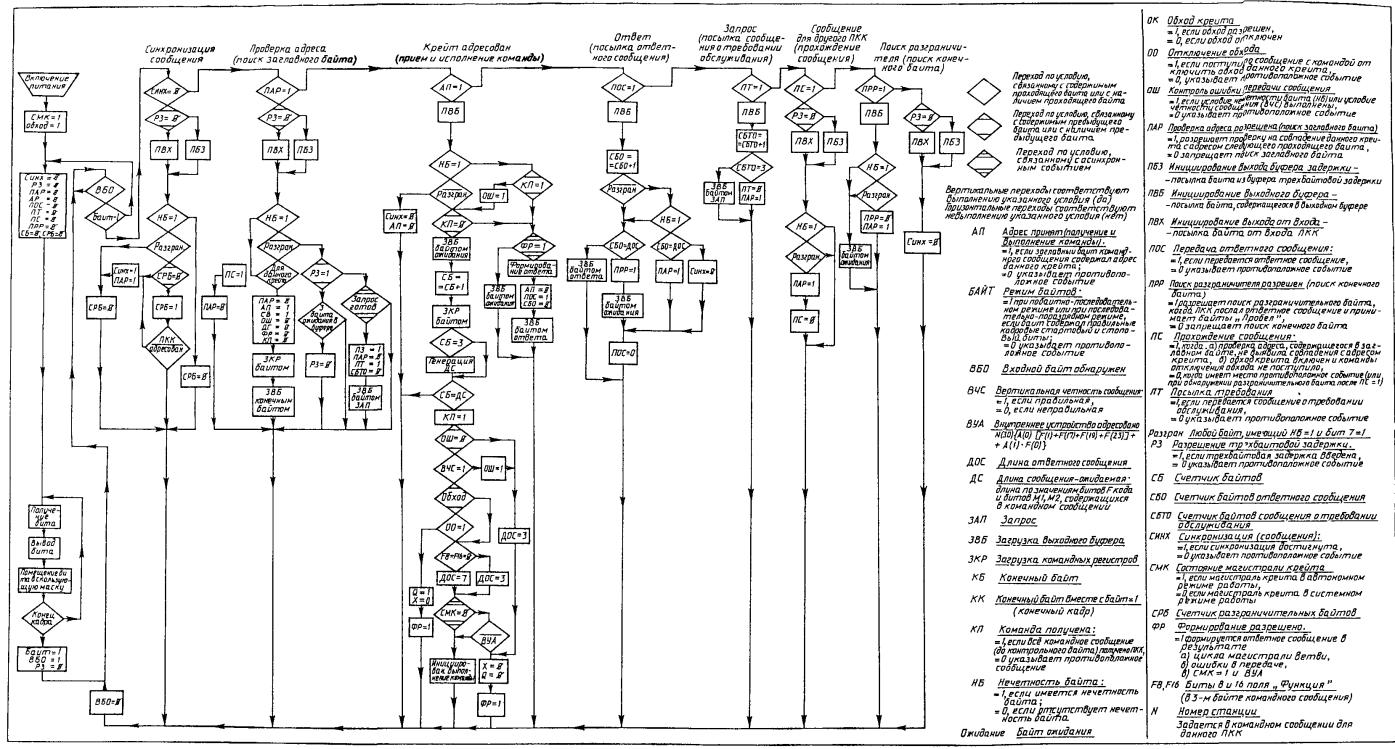
18 Общие требования
Крейт-контроллер обычно поджидает заглавный байт. Последовательный драйвер посылает командное сообщение (см. разд. 13), состоящее из заглавного байта, командного и информационного байтов, контрольного байта, последовательности байтов «Пробел» и конечного байта. Крейт-контроллер опознает заглавный байт, адресованный ему, принимает и контролирует команду и данные, выполняет команду и посылает ответ в периоде пространства и, наконец, заканчивает запись событий, когда он принимает конечный байт.
18.1 Состояние поиска заглавного байта
Эта последовательность предполагает, что крейт-контроллер принял ранее один или более разграничительных байта (конечный или конечный контрольный байт предыдущего сообщения, за которым, возможно, следует один или более байтов ожидания) и ожидает заглавный байт в начале нового сообщения.
|
Когда крейт-контроллер ждет заглавный байт, он должен ретранслировать каждый байт, который он принимает, а также проверять содержимое каждого байта в целях выполнения соответствующего действия, а именно: - если крейт-контроллер принимает разграничительный байт (с разрядом 7-1 и правильной четностью байта), он должен остаться в ожидании заглавного байта и дать разрешение на выдачу своих сообщений о требовании обслуживания; - если крейт-контроллер принимает неразграничительный байт (с разрядом 7-0, верной четностью, а поле адреса крейта соответствует его 6-разрядному адресу), он должен воспринять его как заглавный байт командного сообщения, адресованного ему. Он должен запретить выдачу своих сообщений о требовании обслуживания и приготовиться принять остальную часть командного сообщения; если крейт-контроллер принимает какой-нибудь другой байт, кроме разграничительного или заглавного байта сообщения, адресованного ему, он должен воспринять его как заглавный байт сообщения для (или от) другого контроллера. Он должен запретить выдачу своих сообщений о требовании обслуживания и ретранслировать последующее сообщение без изменений. |
18.2 Состояние приема командного сообщения
При приеме командного сообщения адресуемый крейт-контроллер должен передать сокращенную форму командного сообщения (см. 13.2), состоящего только из заглавного и конечного байта, за которым следует ряд байтов ожидания, необходимых для подготовки им ответного сообщения (см. разд. 14).
|
Адресуемый последовательный крейт-контроллер должен использовать состояние разрядов SF16 и SF8 в поле функции командного сообщения (см. 16.4) для определения, ожидается ли контрольный байт как пятый (если SF16 = 0 и SF8 = 1) или как девятый байт (если SF16 = 1 и SF8 = 0) принимаемого сообщения. Адресуемый крейт-контроллер должен проверить четность по столбцам принятого командного сообщения от заглавного байта до контрольного байта включительно. Он также должен проверить нечетность отдельно по каждому байту. |
Адресуемый крейт-контроллер может проверить, равно ли «00» содержимое поля идентификации типа сообщения (см. 16.7).
18.3 Состояние выполнения команды
|
Адресуемый крейт-контроллер должен выполнять команду и посылать соответствующее ответное сообщение, если удовлетворены следующие условия: а) данные побайтного контроля и контроля четности по столбцам верны; б) данные M1-поля (если это проверено) верны; в) крейт-контроллер находится в режиме работы с магистралью (on-line) (см. 48.1); если он автономен (off-line), или же команда адресуется к его внутренним функциональным узлам; г) крейт-контроллер находится в режиме обхода (см. 48.2) или, если он находится в режиме обхода, то данная команда является командой, сбрасывающей этот режим. В противном случае последовательный крейт-контроллер не должен выполнять команду. |
18.4 Состояние передачи ответа
|
Если адресуемый крейт-контроллер остается в состоянии синхронизации сообщений (и в состоянии синхронизации байта, если таковое требуется) во время цикла команда/ответ, он должен послать ответное сообщение. Если крейт-контроллер выполняет команду, он должен послать ответное сообщение с. форматом, соответствующим коду функции и с содержимым результатов операции. Цикл ответного сообщения не должен начинаться до того, как установлены ответы 0 и X (и данные чтения, если таковые имеются). Если выполнение команды включает операцию на магистрали крейта, передача ответного сообщения не должна начинаться раньше времени t3, приведенного на черт. 9 МЭК 516. Если крейт-контроллер не выполняет команду из-за того, что данные для контроля по четности или проверки M1-поля (см. условия а и б пункта 18.3) неверные, он должен послать трехбайтовое ответное сообщение об ошибке (см. 6.2). Если крейт-контроллер не выполняет команды из-за того, что не соблюдены условия, касающиеся автономного режима работы магистрали крейта или режима обхода (см. условия в и г пункта 18.3), он должен послать ответное сообщение с форматом, соответствующим коду функции и с разрядом SX в состоянии логического «0» для указания, что контроллер не принял команду (см. 63.2). |
Если команда не была выполнена, то можно начать передачу ответного сообщения, как только крейт-контроллер получит контрольный байт.
Для определения видов операций, связанных с сигналами исправления устройства обхода и устройства отключения, инициирование ответного сообщения задержано по отношению к выполнению команды (см. 48.2 и 48.3).
Следом за контрольным байтом последовательный драйвер передает, а крейт-контроллер принимает ряд байтов «Пробел», составляющих пространство ответа. Во многих типичных случаях синхронизации цикла канала крейта и скорости передачи данных последовательной магистрали выполнение команды может быть закончено до приема крейт-контроллером первого байта «Пробел». В этом случае крейт-контроллер может передать заглавный байт ответного сообщения, как только он получит первый байт «Пробел», затем передать байт состояния ответа, как только он получит второй байт «Пробел» и т.д.
|
Каждый байт ответного сообщения должен быть передан адресуемым последовательным крейт-контроллером в ответ на принятый байт. После приема контрольного байта и до посылки заглавного байта ответного сообщения последовательный контроллер должен принять любые неразграничительные байты и передать байты ожидания. Крейт-контроллер должен принять любой полученный неразграничительный байт, пока он передает каждый байт ответного сообщения, а при передаче конечного контрольного байта, крейт-контроллер должен принять любой полученный байт, включая разграничительный байт. Если адресуемый крейт-контроллер получает разграничительный байт после того, как он опознал заглавный байт командного сообщения, и до передачи конечного контрольного байта ответного сообщения, он должен выйти из цикла обмена команда/ответ и перейти в состояние потери синхронизации сообщения (см. 40.2). |
В следующих трех подразделах описывается, что крейт-контроллер начинает генерировать ответное сообщение, как правило, когда получает первый байт «Пробел», и что он генерирует конечный контрольный байт, как только он получает конечный байт командного сообщения. В разд. 23 описаны другие допустимые условия, при которых крейт-контроллер принимает байты Пробел» до того, как он закончит выполнение команды в момент передачи и после передачи конечного контрольного байта.
19 Операция чтения
Последовательность байтов, передаваемых последовательным драйвером и крейт-контроллером, приведена на черт. 15 и 16 для поразрядно-последовательного и побайтно-последовательного режимов соответственно. Командное сообщение не включает поле записи данных. Ответное сообщение включает поле 24-разрядной информации чтения.
В поле функции командного сообщения разряды SF16 = 0 и SF8 = 0 обозначают операции чтения. Поэтому крейт-контроллер находит контрольный байт как пятый байт в полученном сообщении и выполняет контроль четности по столбцам по первым пяти байтам сообщения.
20 Операция записи
Последовательность байтов, передаваемых последовательным драйвером и крейт-контроллером, приведена на черт. 17 и 18 для поразрядно-последовательного и побайтно-последовательного режимов соответственно. Командное сообщение включает поле 24-разрядной информации записи. Ответное сообщение не включает поле данных чтения.
В поле функции командного сообщения разряды SF16 = 1 и SF8 = 0 обозначают операции записи. Поэтому крейт-контроллер находит контрольный байт как девятый байт полученного сообщения и выполняет контроль четности по столбцам в первых девяти байтах сообщения.
21 Операция управления
Последовательность байтов, передаваемых последовательным драйвером и крейт-контроллером, приведена на черт. 19 и 20 для поразрядно-последовательного и побайтно-последовательного режимов соответственно. Ни командное, ни ответное сообщения поле данных не включает.
В поле функции командного сообщения разряд SF8 = 1 обозначает операцию управления (ни чтение, ни запись), и поэтому крейт-контроллер ждет контрольный байт как пятый байт в полученном сообщении и выполняет контроль четности по столбцам в первых пяти байтах сообщения.
22 Сокращенное командное сообщение
Адресуемый крейт-контроллер должен передавать сокращенное командное сообщение в ответ на полученное командное сообщение, состоящее только из заглавного байта (содержащего поле адреса крейта) и конечного байта.
Такая практика отражена в последовательности команда/ответ, приведенной на черт. 15-20, и она является обязательным свойством крейт-контроллера типа L2 (см. приложение А, пункт A3.2). Она рекомендована для всех других крейт-контроллеров по следующим причинам. Только один крейт-контроллер может реагировать на командное сообщение, даже если, например, тот же адрес крейта предназначен более чем одному крейту. Последовательный ряд разграничительных байтов, следующий за сокращенным командным сообщением, дает возможность указать начало ответного сообщения, а также обеспечивает возможность для прямоточных (прозрачных) крейт-контроллеров генерировать запросы (см. 24) и восстанавливать синхронизм байтов (см. 41.3).
Однако в некоторых областях применения требуется, чтобы адресуемый крейт-контроллер ретранслировал командное сообщение до (и включительно) контрольного байта. В этих случаях необходимо предусмотреть соответствующие крейт-контроллеры и последовательные драйверы, но они вполне могут сосуществовать на одном и том же последовательном канале с другими контроллерами, которые генерируют рекомендуемое сокращенное командное сообщение.
Если последовательный крейт-контроллер не передает сокращенную форму командного сообщения, то он должен передать по крайней мере один разграничительный байт в ответ на полученный байт непосредственно перед передачей заглавного байта ответного сообщения.
23 Пространство ответа
Этот раздел охватывает некоторые дополнительные аспекты байтов «Пробел», генерированных последовательным драйвером во время передачи командного сообщения, которые частично или полностью заменяются ответным сообщением от адресуемого крейт-контроллера.
23.1 Завершение цикла операций магистрали крейта
Если период байта длинный по сравнению со временем выполнения команды, адресуемый крейт-контроллер готов послать ответ до того, как он получит первый байт «Пробел». При этих условиях первый байт ответного сообщения может быть передан крейт-контроллером вместо первого байта «Пробел».
В противном случае крейт-контроллер принимает один или более байтов «Пробел» перед тем, как он посылает ответ, и количество дополнительных байтов «Пробел», обозначенных знаком «*» на черт. 15-20, не равно нулю. Крейт-контроллер передает байты ожиданий вместо полученных байтов «Пробел», пока он не выполнит команду. Затем он передает первый байт ответного сообщения вместо следующего байта «Пробел».
23.2 Окончание цикла команда/ответ
В одном режиме последовательный драйвер продолжает генерировать дополнительные байты «Пробел» до тех пор, пока он не получит ответного сообщения. Затем он генерирует конечный байт для окончания цикла. Этот режим обладает таким преимуществом, что он устраняет необходимость контроля со стороны последовательного драйвера точного количества байтов «Пробел». Его недостатком является то, что он снижает возможность генерировать запросы от адресуемого крейт-контроллера; во избежание блокировки требуются меры предосторожности, если команда адресуется несуществующему крейту. Количество дополнительных байтов «Пробел», обозначенных знаком «**» на черт. 15-20, не равно нулю, и крейт-контроллер передает байты ожидания вместо полученных байтов «Пробел».
В другом из возможных режимов последовательный драйвер генерирует расчетное число байтов «Пробел», а затем заканчивает цикл посылкой конечного байта. Он продолжает генерировать байты ожидания, пока не получит ответного сообщения. В этом режиме имеется немного дополнительных байтов «Пробел» или совсем нет ни одного.
Оба режима завершения цикла команда/ответ приводят к простому восстановлению после ошибок (разд. 64), так как каждый цикл завершается до того, как начат следующий.
Возможен режим соответствующий высокой производительности с низким коэффициентом ошибки, когда последовательный драйвер не ждет получения ответа на командное сообщение, прежде чем начнет генерировать следующий. В этом режиме последовательный драйвер генерирует точный минимум байтов «Пробел», в результате чего адресуемый крейт-контроллер генерирует конечный контрольный байт ответного сообщения, когда он получает конечный байт командного сообщения. В условиях, когда ошибок нет, последовательный драйвер, работая в этом режиме, передает последовательность командных сообщений и принимает соответствующую последовательность ответных сообщений в том же относительном порядке, но, возможно, значительно позже и со вставленными запросами. В данном режиме нельзя полагаться на повторное чтение в процессе восстановления от ошибок передачи.
23.3. Длина пространства для ответа
|
Последовательный драйвер должен включить внутрь командного сообщения достаточно байтов «Пробел», чтобы крейт-контроллер мог успеть выполнить команду и передать ответное сообщение. |
Ниже приводится простая формула определения длины пространства для ответа. Эта формула относится к рекомендуемому режиму работы, в котором адресуемый крейт-контроллер передает сокращенную форму командного сообщения (см. 13.2). Она также учитывает наихудший режим, при котором крейт-контроллер завершает полный цикл операций в канале каркаса перед посылкой заглавного байта ответного сообщения. Верхняя оценка S необходимого числа байтов «Пробел» в командном сообщении определяется формулой
S = Nраб + Nотв + 1,
где Nраб и Nотв - число байтов «Пробел», необходимых для выполнения команды и передачи ответного сообщения соответственно, причем Nраб - наименьшее целое число, большее Траб / Тбайт, где Траб - максимальное время цикла магистрали крейта для данного крейт-контроллера, a Tбайт - минимальный байтовый период определенной системы последовательной магистрали; Nотв - два байта для команд записи и управления и шесть байтов для команд чтения.
Детально проанализировав временное соотношение между периодом получаемых байтов и длительностью операций магистрали крейта в определенном крейт-контроллере, можно вполне работать с более низким значением S, чем указано в формуле. Например, если байтовый период Тбайт очень длинный по сравнению со временем операции магистрали крейта Tраб, значение Nраб может быть уменьшено путем передачи ответного сообщения до того, как будет завершен полный цикл операции (см. 18.4). В последнем случае необходимо гарантировать, что если две следующие друг за другом команды записи или управления адресуются одному и тому же крейт-контроллеру, число байтов между контрольным байтом одной команды и байтом подадреса следующей команды достаточно для удержания командных сигналов магистрали крейта на всем протяжении цикла операций.
РАЗДЕЛ 5 ГЕНЕРИРОВАНИЕ СООБЩЕНИЯ О ТРЕБОВАНИИ ОБСЛУЖИВАНИЯ
Формат сообщения определен в разд. 15. Любой ПКК может передать запрос в ответ на L-сигнал на магистрали крейта. Он вставляет его между двумя любыми сообщениями, входящими в поступающую в ПКК последовательность сообщений МП.
Генерирование сообщений о запросе управляется разрядами регистра состояния ПКК (см. разд. 47), а также разделительными разрядами байтов, принятых ПКК. Каждый байт с разделительным разрядом в состоянии логической «1» разрешает инициирование запросов. Поэтому ПКК не может генерировать запрос в момент, когда он принимает командное сообщение, адресованное ему, или когда он ретранслирует либо командное сообщение, адресованное другому крейту, либо ответное сообщение или запрос, генерируемые предыдущим крейтом.
Разграничительный байт, который разрешает ПКК начать генерирование трехбайтного сообщения о запросе на обслуживание, может предшествовать разграничительным байтам нового сообщения. Поэтому в ПКК требуется буферная память, чтобы сохранить байты, поступающие в момент передачи запроса.
Если ПКК, адресуемый командным сообщением, предпочитает передать сокращенное командное сообщение (см. 13.2), то наблюдаются различия в процессе генерирования запроса в крейтах с потоком данных в обратном и прямом направлении по отношению к адресуемому крейту. Генерирование запросов запрещено в крейтах с потоком данных в обратном направлении в период полной продолжительности цикла команда/ответ, от заглавного байта до конечного командного сообщения. В крейтах по ходу потока данных генерирование запросов запрещается в момент передачи двухбайтного сокращенного командного сообщения. Конечный байт данного сообщения и следующие байты ожидания разрешают генерирование запроса в интервале между сокращенным командным сообщением и ответным сообщением.
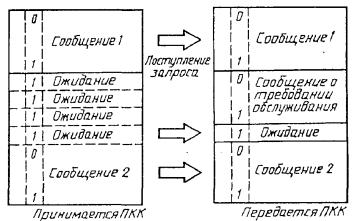
Генерирование запросов опять запрещено заглавным байтом ответного сообщения и разрешено конечным контрольным байтом данного сообщения. На черт. 21 приведена типичная последовательность сообщений, включающая запросы. Запрос здесь генерируется в ПКК1 сразу после того, как передано командное сообщение в ПКК2. Собственный ответ ПКК2 и его сообщение о запросе генерируется им сразу, так что сообщение из ПКК2 вставляется перед запросом от ПКК1 и задерживает его. Сообщение о запросе ПКК3 генерируется им в интервале между сокращенным командным сообщением из ПКК2.
Пример последовательности сообщений, включающий сообщения о требованиях обслуживания
Черт. 21
Примечания
1 Задержки распространения сигналов считают равными нулю.
2 Заштрихованные области указывают, когда возможен запрос от ПКК и его ответ на команду (сокращенное сообщение).
3 Запрос от ПКК1 задерживается на 3 байта в ПКК3.
24 Управление инициированием сообщения о запросе
|
Следующие условия должны быть удовлетворены, прежде чем ПКК инициирует генерирование сообщения о запросе: а) генерирование запроса разрешено соответствующим разрядом регистра состояния ПКК (см. 47.1); б) присутствует такой запрос на обслуживание, который либо появился, как только было передано ПКК последнее сообщение о запросе, либо уже присутствовал, когда ПКК переключался в состояние разрешения запроса; в) ПКК способен принять три поступающих байта с одновременным генерированием сообщения о запросе (см. разд. 25); г) предыдущий байт, переданный в выходной порт, был разграничительный байт (см. 17.1). |
ПКК с соединителем SGL-шифратора (см. разд. 53) должен интерпретировать условие б, находится ли сигнал инициирования сообщения о запросе (ИСЗ) в состоянии логической «1» и переключился ли он из состояния логического «0» в логическую «1», когда ПКК компоновал и передавал последнее сообщение о запросе.
25 Буфер задержки
ПКК не разрешено передавать большее количество байтов, чем он получает (см. разд. 35). Поэтому, когда ПКК генерирует трехбайтное сообщение о запросе, он должен удалить три байта ожидания из потока, проходящего вдоль МП. Если поток байтов в определенное время содержит три байта ожидания, каждый байт запроса сразу заменяет один байт ожидания. В противном случае ПКК передает запрос и затем удаляет три байта ожидания, которые появляются позже в байтовом потоке. Это значит, что байтовый поток, проходящий через ПКК, должен быть задержан на время периода до трех байтовых периодов (см. черт. 22).
Генерирование сообщения о требовании обслуживания
а) Сообщение о требовании обслуживания (запрос) прямо замещает байты ожидания
б) Сообщение о требовании обслуживания (запрос) задерживает приходящее сообщение
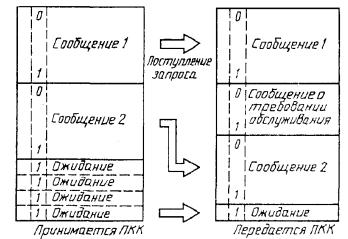
Черт. 22
В момент, когда ПКК вырабатывает трехбайтовое сообщение о запросе, он должен продолжать принимать байты из МП в свой входной порт. Сообщение о запросе должно вытеснить три байта ожидания из байтового потока, проходящего через ПКК, а все другие байты должны быть переданы в правильной последовательности после того, как передано сообщение о запросе.
Для того, чтобы удовлетворить эти требования, любой ПКК, способный генерировать трехбайтные запросы, должен задержать байтовый поток на соответствующее количество байтовых периодов. Эта задержка не должна быть меньше фактического количества принятых байтов, исключая байты ожидания, в течение времени передачи запроса. Байтовый поток МП должен быть задержан, когда ПКК начинает передавать сообщение о запросе, и должен задерживаться до тех пор, пока все три байта ожидания не будут изъяты из байтового потока МП (при условии, что не произойдет потеря байтового синхронизма (разд. 42). Временная задержка должна включаться и выключаться между сообщениями синхронно с байтовыми и тактовыми сигналами.
Данное требование можно удовлетворить с помощью трехбайтового буфера задержки. Когда ПКК начинает генерировать запрос, поступающие байты задерживаются при прохождении в этом буфере. Рекомендуемый ПКК - L2, описанный в приложении А, пункт А1, включает фиксированную трехбайтовую задержку независимо от содержимого байтового потока. Другой вариант, более сложный, но обеспечивающий лучшую работу системы, заключается в том, что ПКК, передающий сообщение о запросе, включает блок однобайтовой задержки каждый раз, когда он принимает не байт ожидания.
После генерирования трехбайтового запроса ПКК продолжает направлять поступающий байтовый поток через буфер задержки до тех пор, пока он не будет способен удалить три байта ожидания из байтового потока. Затем буфер задержки отключается от линии прохождения последовательности сообщений МП.
Рекомендуемый ПКК-L2, описанный в приложении А, п. А1, включает фиксированную задержку из трех байтов, когда буфер заполнится тремя последовательными байтами ожидания (предшествующий контрольный или конечный контрольный байт прошел через буфер). В третьем допустимом варианте, более сложном, но обеспечивающем лучшую работу, ПКК включает один байтовый блок задержки каждый раз, когда принят байт ожидания (различая настоящий байт ожидания и любой предыдущий конечный байт).
После того, как ПКК генерирует запрос, он не может инициировать другой запрос до тех пор, пока он не получит соответствующее количество байтов ожидания, которые отключают буфер задержки (см. условие в) в разд. 24).
Когда ПКК работает в поразрядно-последовательном режиме и теряет байтовую синхронизацию, задержка, связанная с генерированием запроса, должна быть полностью устранена из последовательности сообщений, которая принимается и ретранслируется ПКК в виде потока байтов (см. разд. 42).
Для более подробной информации, касающейся средств разрешения и запрещения формирования сообщения о запросе и способе проверки состояния запроса (см. разд. 47). Что касается информации о кодировании поля, содержащего данные о местонахождении источника запроса, и о необслуженных запросах (см. разд. 14).
26 Идентификация запросов
Начальный байт запроса указывает крейт, в котором появился запрос. Пятиразрядное SGL-поле во втором байте сообщения может быть использовано для более подробного опознания запроса, например, с помощью кода, обозначающего либо позицию, с которой исходил L-сигнал, либо действие, требующееся по запросу.
Эта информация может быть дополнена командой чтения сообщения о запросе. Каждый разряд слова, считанного этой командой, обозначает состояние соответствующей L-линии магистрали крейта (см. п. 44.1).
РАЗДЕЛ 6 ИДЕНТИФИКАЦИЯ СООБЩЕНИЙ
При нормальном режиме сообщения в МП состоят из полных командных сообщений (с полем данных записи или без него), сокращенных командных сообщений, ответных сообщений (с полем данных чтения или без него) и сообщений о запросе. При наличии ошибок могут иметь место различные формы неполных и ложных сообщений, вызванных, например, потерей синхронизации, отказами в работе или искажением байтов ожидания. Этот раздел суммирует информацию для ПКК и последовательного драйвера (ПД), для целей различения этих сообщений и опознания байта, содержащего поле с данными для контроля четности по столбцам.
Три основные составляющие этой информации, имеющиеся у ПКК или ПД, - это поле идентификации сообщения (ИС), поле функции (ПФ) и длина сообщения. ИС-поле (см. 16.7) обеспечивает основные способы различения ответного сообщения, запроса и полного командного сообщения. Длина сообщения (количество байтов от начального байта до первого разграничительного байта) обеспечивает способ различения полного и сокращенного командных сообщений, а также ответных сообщений с полем данных и без него. ФС-поле полного командного сообщения различает командные сообщения с полем данных и без него. ПД может также использовать информацию о типах сообщений, ожидаемых на входе в ответ на различные условия, существующие на выходе. Например, когда отсутствует последовательность команда/ответ, ПД должен получить только сообщения о запросе. При наличии последовательности команда/ответ адресные поля крейта любого командного или ответного сообщения должны соответствовать полям переданных командных сообщений.
27 Полное командное сообщение (минимальная длина 8 байтов, ИС = 00)
При нормальных условиях полные командные сообщения принимаются только ПКК (если адресованный ПКК сокращает командное сообщение, как это рекомендовано в п. 23.2), но при наличии ошибок полные командные сообщения могут быть также приняты ПД (например, адресное поле крейта не опознается ни одним ПКК в системе).
По многим причинам адекватная идентификация полных командных сообщений может быть осуществлена у ПКК путем сравнения поля адреса данного сообщения с адресом данного ПКК. Если поле адреса крейта полученного сообщения соответствует адресу ПКК, это сообщение обычно является полным командным сообщением. Другие сообщения могли бы ошибочно удовлетворить это условие, но должны быть в конце концов отвергнуты проверкой поля с данными для контроля четности по столбцам или по длине сообщения. В качестве дополнительного предостережения ПКК может проверить, равно ли содержимое ИС-поля во втором байте 00 (рекомендуемый ПКК-2, описанный в приложении А, п. А1, не проверяет ИС-поле).
Внутри ПКК позиция контрольного байта определяется анализом ПФ: если (![]() 16 + ПФ8) = 1, что указывает на команды чтения или упражнения, поле с данными для контроля четности по столбцам находится в пятом
байте. Если ПФ16 ·
16 + ПФ8) = 1, что указывает на команды чтения или упражнения, поле с данными для контроля четности по столбцам находится в пятом
байте. Если ПФ16 · ![]() 8 = 1, что указывает на команду записи, поле с данными для контроля четности по столбцам находится в девятом байте.
8 = 1, что указывает на команду записи, поле с данными для контроля четности по столбцам находится в девятом байте.
В ПД это сообщение может быть отлично от сокращенного сообщения по его длине (более двух байтов) и от всех других сообщений по его ИС-полю. Поле с данными для контроля четности по столбцам несокращенного командного сообщения, как правило, неуместно в ПД, но могло бы быть идентифицировано, исходя из ПФ.
28 Сокращенное командное сообщение (длина 2 байта, ИС-поля нет)
ПКК не может получить сокращенное командное сообщение, адресованное ему, при правильной работе системы.
Если это происходит по ошибке, длина сообщения вынуждает ПКК отклонить сообщение (по второму разграничительному байту). В ПД это сообщение может быть идентифицировано только своей длиной. Эта идентификация может быть поддержана сравнением полей адреса крейта полученного сообщения и переданного командного сообщения. В сокращенном командном сообщении нет поля с данными контроля четности по столбцам.
29 Ответное сообщение (длина 3 или 7 байтов, ИС = 01)
При правильной работе системы ПКК не может получить ответное сообщение, поле адреса крейта которого соответствует данному ПКК. Если это происходит по ошибке, ПКК обрабатывает его как командное сообщение и в конце концов отклоняет его по проверке поля с данными контроля четности по столбцам, по длине сообщения или по анализу (если выполнена эта проверка) ИС-поля.
В ПД ответное сообщение без поля с данными чтения имеет ту же длину, что и сообщение о запросе, от которого оно может отличаться только ИС-полем. Ответные сообщения с полями данных или без них могут отличаться только длиной сообщения. Поэтому конечный контрольный байт, содержащий поле с данными контроля четности по столбцам, может быть идентифицирован только как первый разграничительный байт в сообщении.
30 Сообщение о требовании обслуживания (длина 3 байта, ИС = 0 -)
При правильной работе системы ПКК не может получать запрос, поле адреса крейта которого соответствует адресу данного ПКК. Если это происходит ошибочно, ПКК будет обрабатывать его как командное сообщение и в конце концов отклонить его либо по контролю поля с данными для контроля четности по столбцам, либо по длине сообщения, или по анализу (если выполнена проверка) ИС-поля.
В ПД сообщение о запросе может быть выделено по ИС-полю. Оно имеет ту же самую длину сообщения, что и ответное сообщение без поля данных. Конечный контрольный байт, содержащий поле с данными для контроля четности по столбцам, может быть идентифицирован как первый разграничительный байт или как третий байт сообщения.
РАЗДЕЛ 7 D-ПОРТЫ ПОСЛЕДОВАТЕЛЬНОЙ МАГИСТРАЛИ
|
Все последовательные крейт-контроллеры и последовательные драйверы должны иметь входные и выходные соединители D-портов и должны осуществлять через эти соединители либо поразрядно-последовательный, либо побайтно-последовательный режимы или оба режима. Любой ПКК, который осуществляет оба режима: поразрядно-последовательный и побайтно-последовательный, должен иметь средства выбора необходимого режима. |
Этот выбор режима может быть осуществлен внутрисхемно в ПКК. Он не должен быть реализован управлением и индикацией с передней панели ПКК.
ПКК или ПД также может иметь дополнительные порты других стандартов (U-порты), если они не исключены по каким-то особым причинам, как в случае с ПКК типа L2.
Через соединители D-порта передают тактовые сигналы и сигналы информации по отдельным парам проводов, используя сигналы вида без возврата к нулю. Через них также передают выходные управляющие сигналы для внешних устройств отключения и обхода (разд. 59).
31 Соединители D-порта
31.1 Конструктивное исполнение
|
Все входные соединители D-порта должны представлять собой 25-контактные штыревые соединители. Все выходные соединители D-портов должны представлять собой 25-контактные гнездовые соединители. |
|
Соединители D-порта должны иметь фиксаторы с винтовым запором (элементы фиксации). |
Расположение соединителей D-порта на передней панели ПКК установлено в разд. 51.
|
Назначение контактов соединителей D-порта приведено в табл. 3. |
Контакты 22 и 23 используют для битового тактового сигнала в поразрядно-последовательном режиме и для байтового тактового сигнала в побайтно-последовательном режиме.
Контакты 4 и 5 используют для последовательного потока битов в поразрядно-последовательном режиме или для наименьшего бита в побайтно-последовательном режиме.
Семь пар контактов, от контактов 6 и 7 до контактов 18 и 19, используют только в побайтно-последовательном режиме для байтовых разрядов от 2 до 8.
Таблица 3 - Назначение контактов D-соединителей
|
Входной D-соединитель |
Контакт |
Выходной D-соединитель |
|
Общий (Земля) |
1 |
Общий (Земля) |
|
Шина 1 (Свободное использование) |
2 3 |
Шина 1 (Свободное использование) |
|
Бит - последовательные данные или наименьший значащий бит байт-последовательных данных вх |
4 5 |
Бит - последовательные данные или наименьший значащий бит байт-последовательных данных вых |
|
Бит 2 байт-последовательных данных вх |
6 7 |
Бит 2 байт-последовательных данных вых |
|
Бит 3 байт-последовательных данных вх |
8 9 |
Бит 3 байт-последовательных данных вых |
|
Бит 4 байт-последовательных данных вх |
10 11 |
Бит 4 байт-последовательных данных вых |
|
Бит 5 байт-последовательных данных вх |
12 13 |
Бит 5 байт-последовательных данных вых |
|
Бит 6 байт-последовательных данных вх |
14 15 |
Бит 6 байт-последовательных данных вых |
|
Бит 7 байт-последовательных данных вх |
16 17 |
Бит 7 байт-последовательных данных вых |
|
Наибольший значащий бит байт-последовательных данных вх |
18 19 |
Наибольший значащий бит байт-последовательных данных вых |
|
Шина 2 (Свободное использование) |
20 21 |
Шина 2 (Свободное использование) |
|
Битовые (байтовые тактовые сигналы) вх |
22 23 |
Битовые (байтовые тактовые сигналы) вых |
|
Управление устройством обхода |
24 |
Управление устройством обхода |
|
Резервируется для сигнала управления |
25 |
Управление устройством отключения |
|
Примечание.
Каждая балансная входная или выходная линия занимает одну пару контактов. Контакты с четным номером передают «Сигнал». Контакты с нечетным
номером передают « |
||
Контакт 24 входного D-порта соединен с соответствующим контактом выходного D-порта, а также с источником сигнала управления устройством обхода внутри ПКК.
Контакт 25 выходного D-порта соединен с источником сигнала управления устройством аварийного отключения внутри ПКК. Контакт 25 входного D-порта резервирован для использования третьим сигналом управления в случае необходимости.
Контакты 2 и 3 предназначены в качестве шины 1, а контакты 20 и 21 - в качестве шины 2. Эти контакты на входном соединителе D-порта ПКК соединены непосредственно с соответствующими контактами на выходном соединителе D-порта. Шины 1 и 2 представляют собой свободные соединения без определенной функции или направления передачи сигнала.
В качестве примера использования контактов шин 1 и 2 может служить черт. 23, изображающий ПКК в поразрядно-последовательном режиме, который может быть соединен с МП только одним 25-жильным кабелем, соединенным с выходным D-портом. Шины 1 и 2 используют здесь для передачи данных в поразрядно-последовательном режиме и битовых тактовых сигналов в ПКК. Перемычки у входного D-порта ПКК соединяют шину 1 с входными данными и шину 2 с входным тактовым сигналом. Цепь, идущая к последовательному драйверу, замыкается обычным путем, через выходной D-порт.
Пример использования контактов шин 1 и 2 D-соединителей
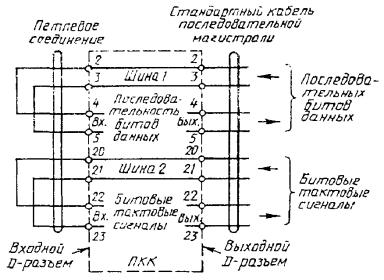
Черт. 23
32 Информационные и тактовые сигналы
Примечание. Стандарты для информационного и тактового сигналов у D-портов основаны на стандарте RS-422 Ассоциации промышленников по радио, электронике и телевидению (Electronic Industries Association)*. Этот стандарт тесно связан с предварительной рекомендацией V11 C.C.I.T.T:
Международный консультативный комитет по телеграфу и телефону (Женева, Швейцария). Предварительная рекомендация Х27 «Электрические характеристики согласованных схем обмена двойных токов для общего использования с оборудованием интегральных схем в области передачи информации»**.
* Electronic Industries Association (2001 Eye Street, Washington DC 2006, USA). Standard RS-422. «Электрические характеристики цифровых схем интерфейса с балансным напряжением», апрель 1975 г.
** Оранжевая книга, Женева, 1977 г., т. VIII. 1, с. 38, ранее Временная рекомендация Х.27.
32.1 Линии передачи информации
Все D-порты передают или принимают данные и тактовые сигналы по двум
проводным линиям передачи, заканчивающимся у приемной части. Каждая линия
передачи должна быть сбалансирована, как, например, витые пары. Номинальное
полное характеристическое сопротивление должно быть 100 Ом. (Вопрос об
ограничении длины линии рассматривался в рекомендации C.C.I.T.T., V11). Один
из проводов каждой линии передачи называется СИГНАЛ (соответствует клемме А в
Рекомендации C.C.I.T.T., V11) и занимает контакт
с нечетным номером. Другой провод обозначен ![]() (соответствует клемме
В) и занимает контакт с нечетным номером.
(соответствует клемме
В) и занимает контакт с нечетным номером.
32.2 Логические состояния
|
Для всех информационных и тактовых сигналов, переданных и принятых через D-порты, уровень напряжения провода СИГНАЛ по отношению к проводу |
32.3 Балансный передатчик
Балансный передатчик должен соответствовать спецификации генератора в Рекомендации C.C.I.T.T., V11.
Характеристика данного передатчика приведена в табл. 4.
Таблица 4 - Характеристика балансного передатчика
|
Обозначение |
Значение |
|||
|
1 Выходное сопротивление между линиями |
- |
≤ 100 Ом |
||
|
2 Значение напряжения между линиями при разомкнутой цепи |
V0 |
≤ 6 В |
||
|
3 Значение напряжения между линией и землей при разомкнутой цепи |
V0a, V0в |
≤ 6 В |
||
|
4 Значение выходного напряжения между линиями при сопротивлении нагрузки 100 Ом |
Vt |
≥ 2 В ≥ 0,5 V0 |
|
выбирают из большего значения |
|
5 Значение напряжения смещения (см. примечание 3) |
V0s |
≤ 3 В |
||
|
6 Значение разности для двух логических состояний Vt |
- |
< 0,4 В |
||
|
7 Значение разности для двух логических состояний V0s |
- |
< 0,4 В |
||
|
8 Значение тока короткого замыкания между линией и землей |
- |
≤ 150 мА |
||
|
Примечания 1 Максимальные величины времени нарастания и спада сигналов от 10 до 90 % при работе передатчика на активную нагрузку 100 Ом следующие: - для тактовых сигналов - меньше 20 не или меньше 0,05 Tmin, в зависимости от того, что больше; - для сигналов данных - меньше 0,1 Tmin (где Tmin есть битовый или байтовый период, определяемый в разд. 36). 2 Значение нормируемого параметра может быть либо положительным, либо отрицательным. 3 Напряжение разбалансировки измеряется между средней точкой испытательной нагрузки в 100 Ом, состоящей из двух сопротивлений по 50 Ом + 1 % каждая, и точкой заземления передатчика. |
||||
Пример балансного передатчика дан на черт. 24.
Пример промежуточного балансного передатчика
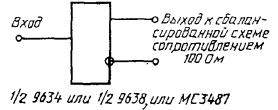
Черт. 24
32.4 Дифференциальный приемник
|
Дифференциальный приемник должен соответствовать спецификации приемника в Рекомендации C.C.I.T.T., V11 и должен включать согласующее сопротивление на входе, равное волновому сопротивлению кабеля. |
Характеристика приемника приведена в табл. 5.
Пример дифференциального приемника дан на черт. 25.
Если ввод ПКК отсоединяется, как это могло бы произойти в замкнутых накоротко схемах, ПКК может получить ошибочные сообщения из-за помех на входах приемника. Поэтому рекомендуется, чтобы линейные приемники с входным гистерезисом использовали тактовый сигнал приемника. Примеры таких линейных приемников, соответствующих Рекомендации C.C.I.T.T., V11, даны на черт. 25. Для некоторых типов приемников может быть необходим внешний гистерезис, дополненный резисторами, как показано на черт. 25а.
Таблица 5 - Характеристика дифференциального приемника
|
Обозначение |
Значение |
|
|
1 Входное сопротивление между линиями |
Rt |
100 Ом ±10 % |
|
2 Входной импеданс между линией и землей, когда согласующее сопротивление в 100 Ом отключено |
- |
≥ 4000 Ом |
|
3 Значение входного напряжения между линиями, при котором приемник должен функционировать нормально |
Vt |
≥ 0,2 В ≤ 6 В |
|
4 Значение суммарного напряжения, при котором приемник должен функционировать нормально (см. примечание 2) |
Vсм |
≤ 7,0 В |
|
5 Максимальное значение входного напряжения между линией и землей |
- |
≤ 10,0 В |
|
6 Значение входного напряжения между линиями, не вызывающее повреждения приемника (при проверке согласующее сопротивление 100 Ом может быть отключено) |
- |
≤ 12,0 В |
|
Примечания 1 Значение нормируемого параметра может быть либо положительным, либо отрицательным. 2 Суммарное напряжение определяется как алгебраическая сумма двух напряжений «линия-земля» на входных зажимах приемника. |
||
Пример дифференциального приемника
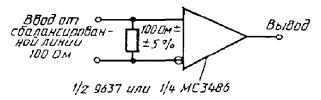
Черт. 25
Пример приемника с гистерезисом, дополненным внешними резисторами
Черт. 25а
33 Сигналы управления
Входной и выходной D-порты передают сигналы для управления внешним устройством обхода (см. 59.1), а выходной D-порт передает сигнал для управления внешним устройством аварийного отключения (см. 59.2). В случае необходимости контакт у входного D-порта резервируется для третьего сигнала управления. Эти сигналы пригодны для управления реле во внешних устройствах и позволяют внешнему устройству принять соответствующее надежное состояние в случае, если питание ПКК или внешнего устройства нарушится.
Каждый сигнал управления занимает только один контакт у D-порта. Эти сигналы имеют общее заземление.
|
Источники и приемники сигналов управления устройств обхода и отключения должны соответствовать стандартам сигнала, приведенным в табл. 6. |
Таблица 6 - Стандарты на сигналы управления D-портов
|
Состояние линии управления |
Ток, потребляемый источником из линии управления |
Приемник должен правильно реагировать на сигналы управления в диапазоне, В |
|
|
0 |
«Свободное» |
Не более 100 мкА для линии управления с напряжением от 0 до +25 В |
10-24 |
|
1 |
«Заземлен» |
Минимальная токовая способность 115 мА для линии управления при напряжении 0,5 В |
0-3 |
|
Примечание - Время реакции приемного устройства в пределах 80 мс. |
|||
33.2 Источники и приемники сигналов управления
Примеры схем для генерирования сигналов управления устройствами аварийного отключения и обхода в ПКК и схем приема управляющих сигналов этих внешних устройств даны на черт. 26.
Примеры схем генерации сигналов управления внешними устройствами «Обход» и «Отключение». (PC-регистр состояния ПКК)
Черт. 26
Схемы сигналов управления устройствами обхода и отключения отличаются требованиями, которые предъявляют внешние устройства в состоянии обхода и в состоянии отключения, если имеется нарушение питания ПКК или внешнего устройства.
|
Если управляемое устройство представляет собой индуктивную нагрузку, оно должно включать схемы подавления переходных выбросов напряжения для предотвращения выхода напряжения сигнала на шине управления за пределы диапазона от -5 В до +30 В. |
РАЗДЕЛ 8 ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ
Временные характеристики при передаче информации по всем секциям последовательного канала определяют задающим генератором у последовательного драйвера. В последовательной системе, полностью основанной на прямой зависимости между D-портами, имеется отдельный тракт через всю МП для передачи тактовых сигналов со скоростью передачи бит или байтов. В системе с взаимосвязями U-стандарта, использующими синхронную передачу, преобразователи передающих сигналов могут передавать тактовые сигналы по тому же самому каналу связи, что и канал информации. Приемники-преобразователи синхронизирующих сигналов будут вновь восстанавливать отдельный тактовый сигнал для использования в следующем D-порте. В системе с взаимосвязями U-стандарта, использующими асинхронную передачу, каждый приемник-преобразователь обычно восстанавливает тактовый сигнал, используя местный генератор номинальной частоты.
34 Частота системных тактовых сигналов
Организация каждой последовательной системы включает возможность выбора соответствующей частоты тактовых сигналов, которая удовлетворяет требованиям эксплуатации и не выходит за пределы ограничений таких характеристик системы, как ограничения в каналах связи и ПКК.
|
Максимальная в данных условиях тактовая частота в любой последовательной магистрали не должна превышать 5,0 МГц. Каждый ПКК и последовательный драйвер должны работать через свои D-порты с любой частотой, вплоть до максимально установленного значения (которое может быть меньше 5,0 МГц). |
Для рекомендуемого ПКК-L2 (приложение А, пункт А1) максимальная частота передачи бит или байтов 5 МГц.
Таким образом, ПКК в последовательном режиме не устанавливает никаких ограничений на частоту или закономерность тактовых сигналов за исключением, возможно, верхнего предела частоты, который должен быть менее абсолютного максимума 5 МГц. Однако другие компоненты системы, такие как каналы связи и преобразователи сигналов, возможно, требуют особой частоты и пределов допустимой неоднородности периодов следования тактовых сигналов.
В любой определенной системе тактовая частота и каналы связи должны быть выбраны с таким расчетом, чтобы информационные сигналы, принятые у входных D-портов, оказывались в устойчивом состоянии в период выборки данных в соответствии с черт. 27.
Временные соотношения для сигналов данных и тактовых (информационных и синхронизирующих) на D-соединителях
Черт. 27
35 Поток байтов
Последовательный драйвер генерирует у выходного порта последовательность байтов, синхронизируемых генератором системных тактовых сигналов. Этот байтовый поток распространяется по последовательному каналу.
|
Каждый раз, когда ПКК принимает один байт, он должен также и передать только один байт. |
Содержимое байтов, принятых и переданных ПКК в определенном байтовом периоде, не всегда идентично.
Байты не могут распространяться через ПКК в отсутствии системных тактовых сигналов, поэтому их генерация должна быть организована постоянно, с учетом специфики системы, в которой вырабатываются сообщения с запросом.
Сообщения и байты в сообщениях необязательно должны быть смежными, они могут быть разделены паузами различной продолжительности. При данных временных сообщениях максимальное быстродействие системы может быть получено, когда байтовый поток состоит из смежных серий байтов. Работа дополнительных контроллеров, которая отвечает на сигналы БЛОКИРОВКИ ДОПОЛНИТЕЛЬНОГО КОНТРОЛЛЕРА, может быть нарушена чрезмерно продолжительными паузами в пределах командных сообщений.
36 Временные соотношения между сигналами
Временные соотношения между тактовыми и информационными сигналами у D-портов приведены на черт. 27. Интервалы времени, характеризующие сбалансированные сигналы у входных D-портов, измеряют относительно моментов пересечения сигналом положительного или отрицательного дифференциального уровня амплитудой 200 мВ (применим и другой уровень).
Интервалы времени, характеризующие сигналы у выходных D-портов, измеряются относительно моментов пересечения сигналом положительного или отрицательного уровня - ± Vt / 2 (применим любой).
Каждый переход тактового сигнала от «1» до «0» определяет начало нового тактового периода. Переход принятого тактового сигнала от «0» до «1» является опорным моментом для интервала выборки данных, во время которого принятые информационные сигналы у входного D-порта должны быть установившимися. У выходного D-порта информационные сигналы устанавливаются вскоре после перехода переданного тактового сигнала от «1» до «0» и сохраняется в таком состоянии до следующего перехода от «1» до «0».
На черт. 27 T-параметр системы, являющейся фактически расширением основного номинального тактового периода: таким образом, Т может состоять из номинального тактового периода, удлиненного паузой. Тмин представляет собой параметр ПКК или ПД и является его минимальным тактовым периодом. Например, Тмин = 200 нс для ПКК типа L2 представлено в приложении А, пункт А1. Взаимосвязь между этими параметрами такова, что Т не меньше Тмин.
36.1 Тактовые сигналы
|
Каждый ПКК или ПД должен выполнять операции, когда продолжительность состояния логического «0» или логической «1» полученного тактового сигнала имеет минимальное значение, представленное на черт. 27. Каждый ПКК и МП должен вырабатывать на своем выходном D-порте синхросигнал, длительность которого в состоянии «0» или «1» не должна быть меньше значений, приведенных на черт. 27. Продолжительность каждого состояния логического «0» или логической «1» тактового сигнала, переданного ПКК выходным D-портом, должна воспроизводить продолжительность полученного состояния тактового сигнала у входного D-порта в пределах искажения уровня, установленного дифференциальной задержкой, показанной на черт. 27, при условии абсолютного выполнения требований к длительностям его логических состояний. |
Кумулятивное ухудшение временных соотношений может возникнуть при прохождении сигналами последовательных секций канала (особенно, если частота синхронизации близка к пределу, установленному полосой частот передающих устройств) и при прохождении через последовательные контроллеры (особенно, если тактовая частота близка к пределу, установленному схемами, которые принимают, формируют и вновь передают тактовые сигналы). Поэтому при определении требований к тактовым сигналам допускается временное искажение между переданными и принятыми тактовыми сигналами в целях учета искажений внутри каждой секции МП. Искажение тактового сигнала внутри каждого ПКК ограничено величиной дифференциальной задержки. Каждый ПКК восстанавливает временные соотношения тактового сигнала, если они ухудшились в большей степени, чем допустимые пределы.
Эти свойства ПКК определяются с учетом своего собственного значения Тмин. Следует учесть, что в конкретной реализации могут возникнуть проблемы, когда в одной и той же системе будут использованы ПКК с весьма различными значениями Тмин. Например, 0,4 Тмин на входе одного ПКК может быть меньше 0,25 Тмин на входе следующего ПКК.
36.2 Переданные информационные сигналы
|
Информационные сигналы, передаваемые через каждый выходной D-порт, должны быть в установившемся состоянии в той части тактового периода, который показан на черт. 27, где Тмин - период, соответствующий установленной максимальной тактовой частоте передающего устройства. |
36.3 Полученные информационные сигналы
|
Информационные сигналы, полученные каждым входным D-портом, должны быть приняты (стробированы) в пределах той части тактового периода, которая дана на черт. 27 как интервал выделения данных. В данном случае Тмин обозначает период, соответствующий установленной максимальной тактовой частоте для устройства приемника. Информационные сигналы за пределами интервала выборки данных не должны приниматься во внимание. |
Когда ПКК ретранслирует полученные данные, требования синхронизации, показанные на черт. 27, определяют выборку полученных данных в момент перехода сигналов от «0» до «1» или около них по отношению к полученному тактовому сигналу, а также ретрансляцию данных в течение большей части периода между последующими переходами от «1» до «0» сопровождаемого тактового сигнала.
Это предполагает, что в ПКК имеется буферная память для данных между входным и выходным портами и что данные задерживаются на время до одного тактового периода при своем прохождении через ПКК.
37 Задержка на распространение сигнала
Поток сообщений на МП подвергается задержке по многим причинам, включающим следующее:
1) передача сигналов в каналах связи и преобразователях сигнала;
2) задержка распространения сигнала внутри ПКК;
3) логическое формирование сигнала в ПКК. Это может вызвать задержку до одного тактового периода. Эта задержка может составлять либо один битовый период в поразрядно-последовательном режиме, либо один байтовый период в побайтно-последовательном режиме (см. п. 36.4);
4) генерация сообщений о требовании обслуживания.
В потоке от ПКК, который генерирует сообщения о требовании обслуживания, следующее сообщение или сообщения могут быть задержаны на период до трех байтов (см. разд. 25).
Таким образом, суммарная задержка на распространение сообщений в цепи МП в малой системе с поразрядно-последовательным режимом может быть всего лишь несколько битовых периодов. В большой системе с побайтно-последовательным режимом нормальная задержка, без учета задержки на передачу и распространение сигналов, может составлять 62 байтовых периода, и в наихудшем варианте - 248 байтовых периодов в случае одновременных запросов, поступающих от всех крейтов.
Хорошая организация последовательного драйвера может предупредить накопление трехбайтовой задержки путем передачи адекватного количества байтов ожидания независимо от того, когда последовательный драйвер принял сообщение о запросе.
РАЗДЕЛ 9 ПОРАЗРЯДНО-ПОСЛЕДОВАТЕЛЬНЫЙ И ПОБАЙТНО-ПОСЛЕДОВАТЕЛЬНЫЙ РЕЖИМЫ
Все сообщения в последовательной магистрали (МП) строятся на базе 8-разрядных байтов. Байты передаются по МП в одном из двух режимов: поразрядно-последовательном или побайтно-последовательном. Все ПКК и последовательные драйверы имеют D-порты, которые обрабатывают байты в одном или обоих режимах.
38 Побайтно-последовательный режим
В этом режиме восемь разрядов байта передаются параллельно через D-порты с каждым разрядом по отдельной контактной паре. Один байт передается в течение каждого тактового периода, как видно из черт. 27. Восемь разрядов устанавливаются передающим D-портом через небольшой интервал времени после перехода от состояния «1» до «0» тактового сигнала и сохраняются до следующего перехода этого импульса от «1» до «0».
|
Последовательный драйвер может генерировать такие тактовые сигналы, в которых номинальный тактовый период предшествует байтовой паузе произвольной длительности. Во время данной паузы тактовые сигналы поддерживаются в состоянии «1» и полный тактовый период удлиняется. Последовательный драйвер и все ПКК должны принимать у D-портов тактовые сигналы данной формы с неравномерными байтовыми периодами. |
В особых системах характеристика каналов связи между D-портами или U-портами может быть такой, что потребуется, чтобы генератор тактовых импульсов выдавал равномерные периоды или чтобы максимальная длительность байтовых пауз была ограничена.
39 Поразрядно-последовательный режим
В данном режиме восемь разрядов байта передаются последовательно через D-порты по одной контактной паре. Восемь битов следует за стартовым битом и предшествует стоповому биту, формируя байтовый кадр из 10 битов. Один бит передается во время каждого тактового периода.
|
В каждом 10-битовом байтовом кадре стартовый бит должен быть передан первым и всегда находиться в состоянии логического «0». Затем следует восемь бит данных, причем, самый младший идет первым (бит 1), самый старший (бит 8) - последним. Столовый бит должен передаваться последним и всегда находиться в состоянии логической «1». Стартовый бит каждого байтового кадра всегда должен следовать за битом в состоянии логической «1». |
Сигнал данных устанавливается на контактной паре передающим D-портом вскоре после перехода от состояния «1» до «0» тактового сигнала и сохраняется до следующего перехода от «1» до «0». Состояние на остальных семи информационных контактных парах D-порта не имеет значения.
39.1 Несмежные байтовые передачи
Последовательные байтовые передачи могут быть смежными или несмежными. Если две байтовые передачи смежные, за стоповым битом первой передачи немедленно следует стартовый бит следующей передачи. Если две передачи несмежные, за стоповым битом первой передачи следует (см. черт. 3) пауза, состоящая из произвольного количества битовых тактовых сигналов, во время которых информационный сигнал сохраняется в состоянии логической «1». Эти разряды паузы предшествуют стартовому биту следующей байтовой передачи.
Следовательно, содержимое стартового бита таково, что перед ним всегда следует разряд в состоянии логической «1», что представляет собой либо столовый бит предшествующей смежной передачи, либо бит паузы, следующий за несмежной передачей.
|
Последовательный драйвер может генерировать либо смежные, либо несмежные байтовые передачи. Все последовательные крейт-контроллеры должны принять смежные или несмежные байтовые передачи у D-портов. |
В особых системах характеристика каналов связи между D-портами или U-портами требует, чтобы количество битов паузы было ограничено, особенно если используется асинхронная передача.
|
У выходного D-порта в поразрядно-последовательном режиме ПКК длительность паузы между любыми байтовыми кадрами должна соответствовать длительности паузы, полученной одновременно у его входного D-порта. |
Некоторые каналы связи могут быть основаны на 11-битовых кадрах (с двумя стоповыми битами). Они эквивалентны 10-битовой передаче, за которой следует по крайней мере один бит паузы.
Благодаря логическим задержкам в ПКК (см. разд. 25) пауза между двумя определенными байтами потока сообщений совсем необязательно воспроизводится между той же парой байтов на выходе ПКК. Однако настоящее требование гарантирует, что если, например, последовательный драйвер генерирует 11-битовые кадры, последние будут правильно воспроизведены всеми ПКК.
39.2 Неравномерные битовые периоды
|
Последовательный драйвер может генерировать тактовые сигналы, в которых фактические битовые периоды произвольно длиннее битового периода, соответствующего номинальной скорости передачи битов. Последовательный драйвер и ПКК должны принять у D-портов тактовые сигналы такой формы с неравномерными битовыми периодами. |
39.3 Выделение байтовых тактовых сигналов
|
Каждый последовательный крейт-контроллер с входными данными D-порта в поразрядно-последовательном режиме должен уметь выделить байтовый тактовый сигнал из полученных 10-битовых байтовых кадров, которые либо соприкасаются, либо отделены паузами, состоящими из любого произвольного количества битовых периодов. |
Для того, чтобы выделить байтовый тактовый сигнал, необходимо идентифицировать полученные байтовые кадры либо логическим «0» стартовых разрядов, либо контекстом «0 - после - 1» (см. 39.1).
Выделение байтового тактового сигнала у соединителя шифратора местонахождения источника запроса описано в п. 54.8.
Стоповый бит полученного байтового кадра инициирует процесс обработки байта внутри ПКК, но его стартовый бит инициирует поразрядно-последовательную передачу байта на выходной D-порт. Таким образом, при некоторых условиях (например, при приеме начального байта) принятый байт ретранслируется до того, как ПКК исследует его содержимое.
РАЗДЕЛ 10 СИНХРОНИЗАЦИЯ
Последовательный драйвер и каждый ПКК должны точно определять синхронизацию формата сообщения байтового потока, получаемого с последовательного канала. Кроме того, при работе в поразрядно-последовательном режиме они должны установить синхронизацию формата байтового потока битов. В настоящем разделе рассматривается способ установления, сохранения и проверки этих двух уровней синхронизации.
40 Синхронизация сообщения
В поразрядно-последовательном и побайтно-последовательном режимах каждое сообщение передается с определенной последовательностью разграничительных и неразграничительных байтов. Для того, чтобы выделить сообщение из потока байтов, каждый блок-приемник должен идентифицировать правильно эту последовательность и таким образом установить и сохранить синхронизацию сообщений.
40.1 Сохранение синхронизации сообщений
|
После установления синхронизации сообщений блок-приемник должен после приема сообщения, заканчивающегося разграничительным байтом, обращаться со следующим неразграничительным байтом как с заглавным байтом нового сообщения. Идентифицировав заглавный байт сообщения, он должен обрабатывать следующий разграничительный байт как конец сообщения. |
40.2 Потеря синхронизации сообщения
Потеря синхронизации сообщений происходит тогда, когда блок-приемник не способен правильно идентифицировать заглавный и конечный байты верного сообщения. Это может случиться в том случае, если, например, какой-то неразграничительный байт разрушается и обращается в разграничительный байт или если информационное поле, определяющее длину командного или ответного сообщения, разрушено.
При работе в поразрядно-последовательном режиме очень возможно, что потеря байтовой синхронизации также приведет к потере синхронизации сообщений. Поэтому синхронизация сообщений всегда восстанавливается после восстановления байтовой синхронизации.
Обнаружение потери синхронизации сообщений основано на проверке наличия разграничительных байтов в соответствующих контекстах.
ПКК требуется проверка синхронизации сообщений только во время выполнения цикла команда/ответ, адресованного ему. В общем случае потеря синхронизации сообщений приводит также к нарушению четности по столбцам (см. 61.2).
|
В последовательном крейт-контроллере должна устанавливаться потеря синхронизации сообщений в следующих ситуациях: а) ПКК только что восстановил байтовую синхронизацию; б) ПКК принял разграничительный байт в любое время после приема заглавного байта командного сообщения, адресованного ему, и перед посылкой конечного контрольного байта ответного сообщения. |
40.3 Установление синхронизации сообщений
|
Последовательный крейт-контроллер с потерянной синхронизацией, работающей в поразрядно-последовательном режиме, должен находиться в байтовой синхронизации (см. п. 41.3) при установлении синхронизации сообщений. Когда установлена байтовая синхронизация, ПКК должен обнаружить в потоке байтов по крайней мере один разграничительный байт (обычно это конечный, конечный контрольный байт или байт ожидания), перед тем как заявить о синхронизации сообщений. При этом следующий неразграничительный байт должен быть обработан как заглавный байт сообщений. |
Повышенная гарантия точной синхронизации сообщений достигается требованием обнаружения более чем одного разграничительного байта, прежде чем будет выставлена синхронизация сообщений.
41 Синхронизация байтов
В побайтно-последовательном режиме системные тактовые сигналы указывают на распространение последовательных байтов и использование в ПКК и ПД непосредственно для синхронизации байтов.
В поразрядно-последовательном режиме каждый 8-битовый байт передается в пределах кадра из старт-стопных битов. Для того, чтобы выделить 8-битовый байт из байтового потока, каждый блок-приемник должен правильно идентифицировать кадровые биты и таким образом установить и сохранить байтовую синхронизацию.
41.1 Сохранение байтовой синхронизации
|
Когда установлена синхронизация байтов, последовательный крейт-контроллер или последовательный драйвер, работающие в поразрядно-последовательном режиме, должны после приема байтового кадра обработать следующий бит в состоянии логического «0» в полученном потоке как начало 10-битового байтового кадра. |
Передача правильно представленной последовательности байтов эквивалентна опознаванию первого перехода в передаче бит от «0» к «1».
41.2 Потеря синхронизации байтов
Потеря синхронизации байтов происходит тогда, когда ПКК или ПД не способны идентифицировать граничные биты (старт-стопные биты) в полученном потоке битов.
Когда ПКК или ПД получает бит в состоянии логического «0» в соответствующем контексте, предполагается, что это - начало 10-битового байтового кадра. Обоснованность этого предположения проверяется исследованием десятого бита байта.
В случае обнаружения ошибки ПКК или ПД могут ложно идентифицировать какой-нибудь другой бит при логическом «0» как стартовый бит. В правильно представленном байте десятый бит является стоповым битом и находится в состоянии логической «1». Десятый бит в ложно представленном байте может быть либо логическим «0», либо логической «1». В случае с логическим «0» это означает потерю байтовой синхронизации. В случае с логической «1» нет ясного указания потери или сохранения байтовой синхронизации. Таким образом, ряд неправильно представленных байтов может быть получен до того, как будет обнаружена потеря байтовой синхронизации.
|
При работе в поразрядно-последовательном режиме ПКК должен выполнять проверку представления байтов по 10-му биту каждого полученного байтового кадра. Если этот бит находится в состоянии логического «0», ПКК должен воспринимать как состояние «потерянной» синхронизации. |
41.3 Установка байтовой синхронизации
|
При потере байтовой синхронизации ПКК должен обнаружить в полученном потоке разрядов комбинацию кода 1,11100000, 02, соответствующего байту ожидания с верными старт-стопными битами прежде, чем утверждать состояние байтовой синхронизации. ПКК должен выполнять этот поиск в массивах байтов ожидания одним из следующих способов: а) в каждом битовом периоде - сравнением последних полученных 10 битов с необходимой комбинацией двоичных разрядов. Это - предпочтительный метод, обязательный для ПКК типа L2; б) в каждом полученном байт-кадре (опознанном по стоп-стартовому переходу «0» после «1») - сравнением 8-битового содержания байта и 8-битового содержания байта, и 8-битового кода байтов ожидания. Это - альтернативный метод, не допустимый для ПКК типа L2. |
После того, как байтовая синхронизация установлена, она поддерживается, как описано в 41.1.
42 Действия ПКК при потере синхронизации
|
Последовательный крейт-контроллер, потерявший байтовую синхронизацию или синхронизацию сообщений, должен ретранслировать через выходной порт поток разрядов или байтов, полученный входным портом. Находясь в состоянии потери синхронизации или сообщений, ПКК не должен принимать командные сообщения, адресованные ему, или генерировать ответное сообщение или запрос. Если ПКК уже принял заглавный байт командного сообщения, адресованного ему, а затем потерял синхронизацию, он не должен ни начинать передавать ответное сообщение, ни продолжать передачу ответного сообщения, которое он уже начал. Если ПКК теряет байтовую синхронизацию, он должен выключить буфер задержки. В этом случае, когда ПКК теряет синхронизацию сообщений, он не должен ни включать, ни выключать буфер задержки. |
Типичные варианты реализации ПКК (включая вариант, описанный в пункте А2 приложения А) имеют два типа внутренних передач информации. Один - прямая поразрядно-последовательная передача, при которой передаются все биты из входного порта в выходной порт, и не зависит от байтовой синхронизации. Другой - в основном побайтно-последовательная передача, при которой передастся 8-битовое содержимое байтовых кадров, и зависит от правильной байтовой синхронизации. Таким образом, разрушение потока битов сведено до минимума выключением буфера задержки: когда потеряна байтовая синхронизация, используется прямая поразрядно-последовательная внутренняя передача информации.
РАЗДЕЛ 11 ОБРАЩЕНИЕ К РЕГИСТРАМ ПКК
Команды, принятые ПКК, адресуются либо к функциональным блокам в крейте КАМАК, либо к внутренним схемам самого ПКК. В первом случае команда выполняется посредством операции в магистрали крейта (МК). Во втором случае выполнение команды не включает действие МК.
Доступ к внутренним регистрам. ПКК осуществляется через субадрес с номером станции N (30). Внутренние одноразрядные схемы без связанного с ними информационного слова управляются и запрашиваются обращением к соответствующим разрядам регистра состояния.
|
Каждый ПКК должен принять и выполнить все команды, адресованные к внутренним регистрам, за исключением того случая, когда ПКК находится в режиме обход. Время цикла для выполнения этих команд не должно превышать времени операции МК, но в определенных операциях (см. 48.2 и 48.3) инициирование ответного сообщения должно быть задержано. Когда команды, приведенные в табл. 7, выполняются успешно, разряды SQ и SX в поле состояния должны иметь содержание, указанное в таблице. Для других команд, адресованных ПКК (при N (24) - N (31) включительно), разряд SX в ответном состоянии должен быть в состоянии логической «1», если команда может быть выполнена ПКК, и в состоянии логического «0», если она не может быть выполнена. |
Таблица 7 - Команды, выполняемые ПКК
|
Команда |
Ответ |
||||
|
N |
А |
F |
SQ |
SX |
|
|
Регистр состояния |
|
|
|
|
|
|
Чтение |
30 |
0 |
1 |
1 |
1 |
|
Запись |
30 |
0 |
17 |
1 |
1 |
|
Селективная установка |
30 |
0 |
19 |
1 |
1 |
|
Селективный сброс |
30 |
0 |
23 |
1 |
1 |
|
Повторное чтение для данных |
90 |
1 |
0 |
DSQ |
1 |
|
Чтение слова запросов LAM |
30 |
12 |
1 |
1 |
1 |
43 Регистр состояния
Регистр состояния включает совокупность одноразрядных признаков ПКК с таким общим свойством, как доступность по номеру станции N (30) и субадресу А (0). Некоторые разряды регистра предназначены для управляющих схем ПКК, а другие указывают общее состояние схем ПКК. Внутренние схемы, которые доступны через регистр состояния, описаны в разд. 12.
Назначение разрядов в регистре состояния по функциям управления и индикации показано в табл. 8; это управление и индикация осуществляются посредством операций записи и чтения соответственно.
Таблица 8 - Распределение разрядов регистра состояния
|
Операция записи |
Операция чтение |
Примечание |
|
|
Логическая «1» в регистре вызывает |
Логическая «1» в регистре указывает |
||
|
1 |
Генерирование Z |
(Всегда «0») |
Автоматический сброс к логическому «0» |
|
2 |
Генерирование С |
(Всегда «0») |
|
|
3 |
Установку I = 1 |
Iвых = 1 |
|
|
4 |
- |
DERR = I |
Состояние предыдущего ответа |
|
5 |
- |
DSX = I |
|
|
6 |
- |
DSQ = I |
|
|
7 |
- |
I = I |
|
|
8 |
Резерв |
(Всегда «0»)* на МК |
Резерв |
|
9 |
Разрешение запросов |
Запрос разрешен |
|
|
10 |
Установка внутреннего запроса |
Внутренний запрос L24 = 1 |
|
|
11 |
Отключение секций |
Секции отключены |
Индикация управляющих сигналов |
|
12 |
Обход включен |
(Всегда «0»)* |
|
|
13 |
Отключение МК |
МК отключена |
|
|
14 |
|
Переключатель в позиции «Автономный» |
|
|
15 |
(Резерв) |
(Всегда «0»)* |
Резерв |
|
16 |
- |
Выделенный LAM присутствует |
|
|
17 |
(Резерв) |
(Всегда «0»)* |
Резерв |
|
18 |
(Резерв) |
(Всегда «0»)* |
» |
|
19 |
(Резерв) |
(Всегда «0»)* |
» |
|
20 |
(Резерв) |
(Всегда «0»)* |
» |
|
21 |
Что требуется |
Что требуется |
Свободно |
|
22 |
Что требуется |
Что требуется |
» |
|
23 |
Что требуется |
Что требуется |
» |
|
24 |
Что требуется |
Что требуется |
» |
|
* Справедливо, пока разряд имеет статус «Резерв». |
|||
Если ПКК обеспечивает доступ к какому-то признаку, показанному в табл. 8, он должен делать это через соответствующий разряд или разряды регистра состояния, как показано в таблице. Разряды, указанные как «Резервирован», не должны использоваться.
Свободные двоичные разряды регистра состояния могут быть использованы для исправления и запроса любых схем ПКК, за исключением особо оговоренных (как в случае с ПКК типа L2). Это замечание не определяет и заранее не оговаривает использование свободных двоичных разрядов.
Разряды, которые управляют функциями ПКК, могут быть установлены в состояние логической «1», и, как правило, сброшены в «0» такими операциями, как запись F(17), селективная установка F(19) и селективный сброс F(23). Каждый управляющий разряд в регистре состояния связан с соответствующим SW битом в поле данных записи командного сообщения.
Разряды, которые указывают состояние внутренних функций, могут быть запрошены такими операциями, как чтение F(1). Каждый указывающий разряд в регистре состояния связан с соответствующим битом SR в поле данных чтения ответного сообщения.
При включении питания ПКК определенные разряды в регистре состояния должны принять значения, представленные в табл. 9.
Таблица 9 - Исходные значения разрядов регистра состояния после включения питания
|
Значение после включения питания |
Состояние системы |
|
|
3 |
1 |
Запрет установлен (I = 1) |
|
9 |
0 |
Запросы запрещены |
|
10 |
0 |
Внутренний L24 = 0 |
|
11 |
0 |
Секции не отключены |
|
12 |
1 |
Обход ПКК |
|
13 |
1 |
Магистраль крейта отключена |
44 Другие регистры
Вес остальные адресуемые регистры в ПКК должны иметь доступ через соответствующие субадреса, предпочтительно через номер станции N(30).
44.1 Комбинация заявок*
Характеристика обслуживания заявок ПКК включает способность запрашивать состояние 24 LAM-сигналов МК, от L1 до L24, которые образуют фактический регистр, доступный по команде чтение с номером станции N(30), субадресом А(12) и функцией F(1) «Чтение регистра группы 2».
Таким образом, некоторые системы могут реагировать на сообщение о запросе с определенного крейта чтением кода заявки из данного крейта в целях распознавания функциональных блоков, требующих обслуживания.
|
В ответ на команду чтения слова запросов LAM, приведенную в табл. 7, последовательный крейт-контроллер должен ответить сообщением с полем данных чтения, указывающим логическое состояние L-линий от L1 до L24 магистрали крейта, включая имитированный запрос, эквивалентный сигналу L24 (см. 47.2). Логическое состояние сигнала L1 должно быть указано разрядом SR1 и т.д. Заявка, принятая при данной операции, должна быть независима от состояния разряда разрешения регистра состояния и от любого выбора или распознавания запросов, осуществляемого соответствующим SGL-шифратором. В период выполнения команды чтения заявки на обслуживание ПКК не должен генерировать сигнал «занят» В = 1 магистрали крейта. |
Эта рекомендуемая особенность ПКК позволяет восстановить информацию после неудачного чтения, во время которого информация была считана от функционального блока с разрушением данных и не принята последовательным драйвером. Если бы ПКК с этой особенностью ни выполнил команду чтения, он хранил содержимое поля с данными чтения и битом состояния (SQ), который он сформировал для ответного сообщения. Таким образом, если последовательный драйвер не способен правильно принять ответное сообщение, он может выдать команду повторного чтения в целях выборки этой хранимой информации чтения из ПКК. Бит задержанной ошибки в поле состояния ответных сообщений играет важную роль в данном процессе восстановления (см. пункт 63.3 и разд. 64).
|
Все последовательные крейт-контроллеры должны ответить на команду повторного чтения согласно табл. 7 генерированием ответного сообщения с полем данных чтения. При этом SX-бит в поле состояния ответного сообщения должен находиться в состоянии «1», если команда повторного чтения выполняется ПКК и SX = 0 в других случаях. Если ПКК выполняет повторное чтение, содержимое поля с данными чтения в ответном сообщении должно состоять из слова с данными чтения от предыдущей операции, адресованной ПКК, если это была правильно выполненная операция чтения. SQ-бит в поле состояния ответа должен соответствовать DSQ-разряду в регистре состояния (SQ = DSQ). |
Если ПКК только что выполнил команду записи или управления, но не выполнил предыдущую команду или не выполняет команду повторного чтения, содержимое поля с данными чтения неопределенно.
Таким образом, данные чтения, полученные в результате выполнения команды чтения, могут быть восстановлены, даже если передача ответного сообщения не осуществлена. Это в равной степени относится к командам чтения, имеющим доступ к функциональным блокам и внутренним схемам ПКК.
РАЗДЕЛ 12 ФУНКЦИИ ПКК, ВЫПОЛНЯЕМЫЕ ЧЕРЕЗ РЕГИСТР СОСТОЯНИЯ
Данный раздел касается устройств ПКК, состояние которых может управляться и/или запрашиваться операциями, адресованными регистру состояния.
45 Общее управление магистралью крейта
Генерация сигналов общего управления магистрали крейта: пуск (Z), сброс (С) и запрет (I) обусловлена определенными битами регистра состояния.
45.1 Установка в начальное состояние и сброс
Разряд 1 регистра состояния управляет выработкой сигнала «Пуск», а разряд 2 - сигнала «Сброс» как одиночных операций.
|
Если последовательный крейт-контроллер находится в системном режиме работы (см. 48.1) и вне режима обхода (см. 48.2), он должен реагировать на команды, которые устанавливают разряды 1 или 2 регистра состояния в положение «1» генерацией безадресной операции МК (согласно разд. 7.1.3.2 ГОСТ 27080). Эта операция должна сопровождаться сигналом Z, если разряд 1 = «1» или сигналом С, если разряд 2 = «1». ПКК должен вернуть разряд 1 или 2 в состояние «0» не позже конца операции на МК. Если ПКК находится в системном режиме работы и вне режима обхода, он должен установить разряды 1 и 2 регистра состояния в положение логической «1» посредством команд записи или селективной установки с соответствующими значениями битов SW1 или SW2 соответственно в поле данных записи командного сообщения. Если ПКК находится в автономном режиме работы или в режиме обхода (регистр состояния, разряд 12 = «1»), он должен поддерживать в «0» разряды 1 и 2 регистра состояния. Он не должен разрешать операции МК в ответ на команды, пытающиеся установить эти разряды в состояние логической «1». Биты SR1 и SR2 информационного слова, считанного с регистра состояния, должны всегда быть в состоянии логического «0». |
45.2 Запрет
Сигнал «Запрет» (1) МК, генерированный ПКК, управляется разрядом 3 регистра состояния (PC).
|
Если последовательный крейт-контроллер находится в системном режиме работы и вне режима обход (разряд регистра состояния 12 = «0»), он должен генерировать сигнал в шину запрета МК, соответствующий логическому состоянию разряда 3 регистра состояния (Iвых = разряду 3). Если ПКК находится в автономном режиме работы (см. 48.1) или в режиме обхода (разряд регистра состояния 12 = «1»), он должен генерировать логический «0» в шину запрета независимо от логического состояния разряда 3 регистра состояния (Iвых = 0). Шина запрета, таким образом, может свободно принять нулевое состояние, если какое-нибудь другое устройство не переводит ее в состояние «1». При всех условиях бит SR3 поля данных чтения ответа на команду чтения PC должен указывать состояние разряда 3 регистра, а бит SR7 должен указывать состояние шины запрета МК (разряд 7 = 1). |
Если имеется другой источник сигнала «Запрет», состояние разряда 7 необязательно будет таким же, как состояние разряда 3.
|
ПКК должен обеспечивать установку разряда 3 регистра состояния в требуемое состояние операции записи, используя соответствующее значение бита SW3 в поле данных записи. Он не должен допускать, чтобы разряд 7 устанавливался или сбрасывался с помощью операции записи. Разряд 3 PC должен быть установлен в состояние логической «1», когда ПКК выполняет операцию «Пуск» на МК. |
46 Состояние цикла команда-ответ
Три разряда регистра состояния указывают результат предыдущего цикла, осуществляемого ПКК. Особенно следует отметить, что они были соединены со средствами восстановления определенных видов ошибок (см. разд. 64).
Разряд 4 - это разряд задержанной ошибки (DERR), указывающей результат контроля ошибки предыдущего цикла передачи.
Разряд 5 - разряд задержанного ответа на принятую команду (DSX), указывающий Х-ответ в предыдущей передаче.
Разряд 6 - разряд задержанного Q-ответа (DSQ), указывающий Q-ответ в предыдущей передаче.
|
В ответ на команды, считывающие содержимое PC, биты SRC4, SRC5 и SRC6 в поле с данными чтения должны указать текущее состояние разрядов 4, 5 и 6 соответственно регистра состояния. Нельзя допускать информации в эти разряды регистра. Прежде чем закончить или прекратить операции команда-ответ, ПКК, который осуществляет этот цикл, должен установить разряды DERR, DSX и DSQ регистра состояния следующим образом. Разряды DSX и DSQ в конце цикла обмена должны быть установлены в соответствии с состоянием битов SX и SQ поля ответного сообщения. DERR-разряд должен быть установлен в состояние логической «1», если цикл операций прекращен прежде, чем ПКК принял действительные Q- и Х-ответные (и данные чтения, если таковые имеются), или если в цикле обмена выявлена ошибка ERR = 1 или ответ на команду магистрали крейта X = 0. |
Если цикл обмена прекратился до выполнения команды, так что нет Х- и Q-ответов МК, относящихся к данному циклу операций, разряды DSX и DSQ должны быть установлены в логическое состояние «0».
47 Обработка требований
Разряды 9, 10 и 16 регистра состояния (см. 43) связаны с управлением, проверкой и контролем передачи сообщений о требовании обслуживания.
47.1 Разрешение сообщения о требовании обслуживания
Разряд 9 регистра состояния используется ПКК для управления инициированием сообщений о требовании обслуживания и ответ на L-сигналы МК или на модулируемую заявку по сигналу L24, или в ответ на какой-либо внутренний источник запросов внутри ПКК.
|
Всякое инициирование сообщений о требовании обслуживания с помощью ПКК должно быть заблокировано, когда разряд 9 регистра состояния находится в состоянии логического «0». Когда разряд 9 находится в состоянии «1», сообщения о запросах могут быть инициированы согласно условиям, описанным в 24. Последовательный крейт-контроллер должен разрешить установку или сброс разряда 9 регистра состояния операциями записи, используя соответствующие значения бита SW9 в поле записи данных. Бит SR9 информационного слова, считанный с регистра состояния, должен указывать текущее состояние разряда 9 регистра. |
47.2 Запрос L24
В качестве средства самоконтроля ПКК включает средства имитирования сигнала заявки на обслуживание с линии канала каркаса L24. Генерация сообщения о запросе и содержимое его поля с данными о местонахождении источника запроса будут зависеть от соответствующих условий, присутствующих у разъема последовательного сортировщика запросов ПЗС (SGL), а также от наличия разрешения инициирования запросов (разряд 9 регистра состояния в состоянии логической «1»).
|
Когда разряд 10 регистра состояния находится в состоянии «1», ПКК должен имитировать сигнал от линии L24 магистрали крейта. Имитированный запрос должен присутствовать в соединителе SGL шифратора для выделения и кодирования. Последовательный крейт-контроллер должен разрешить установку или сброс разряда 10 регистра состояния операциями записи, используя соответствующее значение бита SW10 в поле с данными записи командного сообщения. Бит SR10 поля с данными чтения ответа на команды, которые считывают регистр состояния, должны указывать текущее состояние разряда 10 регистра. |
47.3 Наличие выбранной заявки
Разряд 16 регистра состояния указывает, представляет ли какой-нибудь L-сигнал МК (включая L24), выбранный внешним последовательным сортировщиком запросов (SGL), действительную заявку. Простой SGL-шифратор может получить это условие непосредственно из суммарного L-сигнала (см. 54.2), который является комбинацией ИЛИ 24 L-сигналов. Более сложное кодирующее устройство с возможностью маскировки нежелательных L-сигналов может извлечь данное условие из комбинации ИЛИ выбранных L-сигналов.
|
Бит SR16 поля с данными считывания в ответ на команды, считывающие регистр состояния, должен указывать текущее состояние разряда 16 регистра. Нельзя допускать запись в разряд 16. |
48 Управление конфигурацией последовательной магистрали
Три разряда в регистре состояния управляют режимом работы ПКК (автономный или системный) и любыми устройствами обхода или отключения, используемыми для изменения конфигурации последовательной магистрали.
Эта особенность ПКК управляется разрядом 13 в регистре состояния совместно с ручным управлением на передней панели (см. п. 49.2). Текущее состояние ручного управления указывается разрядом 14 регистра состояния. Когда ПКК находится в автономном режиме работы, МК и МП должны быть отключены друг от друга, чтобы операции на обеих магистралях могли продолжаться самостоятельно. Например, эта изолированность позволяет вспомогательному контроллеру выполнять операции на МК независимо от операций, имеющих место в МП. Поэтому такое отключение не должно препятствовать доступу вспомогательного контроллера к N-линиям (см. 58.1).
|
Когда последовательный крейт-контроллер находится в автономном режиме работы, ему следует принять и передать дальше все сообщения МП. Он не должен выполнять ни одной команды, адресованной блок на станциях от N(1) до N(23), а должен послать ответное сообщение с форматом, соответствующим принятому коду функции, и с SQ = 0 и SX = 0 в поле состояния. Он может выполнять команды, адресованные регистру состояния, но не может устанавливать разряд 1 и 2 регистра состояния в положение «1». В момент выполнения команд, адресованных какой-нибудь своей схеме, ПКК в автономном режиме работы не должен формировать стробирующие сигналы S1 и S2 в МК. Если рекомендуемая изоляция МК от МП не осуществлена, ПКК должен генерировать в МК сигнал «Занят-1», выполняя все команды, адресованные схемам ПКК, за исключением команды чтения LAM-заявки. В автономном режиме работы ПКК не должен генерировать запросы в ответ на L-сигналы в МК, но может сделать это в ответ на свои внутренние запросы. Если ПКК имеет какие-нибудь внутренние источники запросов, кроме L24, которые могут генерировать сообщения о запросах, он должен выполнять команду Чтение LAM-заявки (см. 44.1) при работе в автономном режиме. ПКК должен перейти в автономный режим работы, когда или ручное управление на передней панели в положении «автономный режим», или разряд 13 регистра состояния находится в состоянии логической «1». Он может перейти в системный режим работы только тогда, когда ручное управление на передней панели в положении «включено» и разряд 13 регистра состояния находится в состоянии логического «0» (см. табл. 10). |
Таблица 10 - Управление автономным состоянием канала крейта
|
Регистр состояния разряда 13 |
Состояние МК |
|
|
Системный |
0 |
Системный |
|
Автономный |
0 |
Автономный |
|
Системный |
1 |
Автономный |
|
Автономный |
1 |
Автономный |
Таким образом, ручное управление с передней панели может обеспечить автономный режим работы ПКК, но для этого требуется согласие системного контроллера (через разряд 13), чтобы был выбран системный режим работы.
|
Последовательный крейт-контроллер должен обеспечить задержку переключения режимов работы из системного в автономный или из автономного в системный, пока не закончится цикл операций команда-ответ, в котором он занят. ПКК, который выполняет эту операцию, разрешает установку или сбор разряда 13 операциями записи регистра состояния с соответствующим значением бита SW13 в поле данных записи командного сообщения. Биты SR13 и SR14 в поле данных чтения ответа на команды, которые считывают регистр состояния, должны показывать текущее состояние разряда 13 регистра и позицию ручного управления режимом работы (off-line) соответственно. |
Автономный режим работы ПКК указывается комбинацией битов SR13 и SR14 поля с данными чтения (см. табл. 10).
Эта особенность ПКК связана с разрядом PC 12 и с сигналом у D-портов, предназначенным для управления внешним устройством обхода (см. 59.1).
|
В каждом ПКК на его выходном и входном D-портах необходимо предусматривать возможность приема-передачи сигнала управления обходом согласно 33.1. Этот сигнал управляется разрядом 12 регистра состояния, и в ответ на любую команду, которая устанавливает этот разряд в состояние «1», сигнал управления должен соответствовать логической «1» после того, как будет передано ответное сообщение. В ответ на команду, возвращающую разряд PC 12 в нулевое состояние, сигнал управления на выходе должен немедленно перейти в состояние «0», если любой другой узел, соединенный с шиной управления, не приводит его к состоянию «1», но инициирование ответного сообщения должно быть задержано на 100 мс ± 10 %. Последовательный драйвер должен генерировать пространство для ответа в командном сообщении (см. 23), соответствующем пространству для посылки задерживаемого ответа. |
Таким образом, ответ на команду, которая вызывает обход крейта или их группу, передается в МП до того, как сработает устройство обхода, а ответ на команды, которые отключают обход крейта или их группу, задерживается до тех пор, пока устройство обхода не восстановит нормальный путь.
|
Выходной сигнал управления обходом из ПКК с отключенным питанием должен находиться в состоянии логической «1». При включении питания разряд 12 регистра состояния должен оставаться в состоянии логической «1» до тех пор, пока он не будет сброшен по специальной команде. В поле данных чтения ответа на соответствующие команды для регистра состояния бит SR12 всегда должен быть в состоянии логического «0». Когда ПКК находится в режиме обхода разряд 12 регистра состояния в состоянии логической «1», он должен выполнять только те команды, которые действуя на регистр состояния, выводит его из состояния обхода путем возвращения бита SR12 в состояние логического «0». Такие команды могут оперировать и с другими разрядами регистра состояния. Любая другая команда, принятая в момент, когда ПКК находится в режиме обхода, не должна выполняться. При этом ПКК должен передавать ответное сообщение, соответствующее полю функции командного сообщения, и с ответами SX = 0 и SQ = 1 в поле состояния. |
Если ППК обходится при помощи внешнего устройства обхода, ответ на невыполненную команду не передается через последующие крейты на последовательный драйвер. Внешнее устройство обхода полностью передает командное сообщение по МП.
48.3 Режим отключения
Эта особенность ПКК связана с разрядом 11 регистра состояния и с сигналом на выходе D-порта, предназначенным для управления (необязательным) внешним устройством отключения цепи (см. 59.2).
|
В каждом последовательном крейт-контроллере должен предусматриваться на выходе D-порта сигнал аварийного отключения согласно 33.1. Этот сигнал должен управляться разрядом 11 регистра состояния. В ответ на команду, устанавливающую разряд 11 в состояние «1», сигнал управления должен быть немедленно приведен в состояние «1», а инициирование ответного сообщения должно быть задержано на 10 мс ±10 %. В ответ на любую операцию, устанавливающую разряд 11 в состояние «0», после того как ответное сообщение передано, сигнал на выходе должен быть переведен в состояние «0». Последовательный драйвер должен генерировать пространство для ответа в командном сообщении соответствующей продолжительности для обслуживания задержанного ответа. Сигнал управления отключением на выходе из ПКК с отключенным питанием должен быть в состоянии логического «0». При включенном питании ПКК разряд 11 регистра состояния должен оставаться в состоянии «0» до тех пор, пока он не будет установлен в другое состояние специальной командой. |
Команды, направленные внешнему устройству отключения, должны быть адресованы последнему крейту перед отключаемыми секциями магистрали. Таким образом, ответ на команду, которая размыкает цепь (например, исключить ПКК, имеющий сбои, или секцию МП), задерживается до тех пор, пока он не будет иметь возможность передать его через укороченную цепь. Ответ на команду, которая удлиняет цепь (вводя ПКК, которые, возможно, потеряли синхронизацию), передается по укороченной цепи, действующей до удлинения.
В поле данных чтения ответа на команды, которые предназначены для регистра состояния, бит SR11 должен указывать состояние разряда 11 регистра.
РАЗДЕЛ 13 ПОСЛЕДОВАТЕЛЬНЫЙ КРЕЙТ-КОНТРОЛЛЕР. ХАРАКТЕРИСТИКИ ПЕРЕДНЕЙ ПАНЕЛИ
49 Ручные устройства управления
Следующие устройства ручного управления должны быть предусмотрены на передней панели каждого ПКК.
49.1 Переключатель адреса крейта
Каждый ПКК должен иметь переключатель адреса крейта, с помощью которого может быть присвоен любой адрес в диапазоне от 018 до 768 (см. 16.1); при этом желательно не вынимать контроллер из крейта.
Особые условия применения могут потребовать других средств присвоения: ограниченный диапазон адресов или присвоение более одного адреса. Это разрушается в случае, если нет особых причин для исключения (как в случае о рекомендуемых ПКК типа L2).
Следует принимать меры к сведению до минимума опасности случайного изменения присвоения адреса. Например, переключатель может быть управляем отверткой через переднюю панель.
49.2 Переключатель автономного режима работы магистрали крейта
Этот переключатель (см. 48.1) имеет две позиции, обозначенные «Системный» и «Автономный». Конструкция или местоположение переключателя должно свести до минимума опасность случайного изменения состояния. Рекомендуется замыкающий тумблер.
49.3 Переключатели пуска и сброса
Эти две кнопки или аналогичные управляющие элементы непосредственного контактирования инициирует безадресные операции в МК. Они будут функционировать тогда, когда ПКК в МК находится в автономном режиме работы. На передней панели должны быть к этому указания.
50 Индикаторы и маркирование
На передней панели каждого ПКК должны быть предусмотрены следующие визуальные индикаторы и маркирование.
50.1 Адрес крейта
Указание адреса, выбранного переключателем адреса крейта. Это указание может составлять часть переключающего механизма, например, видимого через окно передней панели.
50.2 Системный режим работы
Указание, что ПКК находится в системном режиме работы (исходит из переключателя МК согласно 4.9.2 и разряда 13 регистра состояния).
50.3 Сигнал «Запрет» в МК
Указание состояния сигнала «Запрет» (1) в МК.
50.4 Состояние потери синхронизации
Индикация моностабильности, указывающая на состояние ПКК, когда в нем потеряна синхронизация байтов или синхронизация сообщений (см. разд. 16).
50.5 Крейт адресован
Индикация моностабильности*, указывающая поступление сигнала «КОНТРОЛЛЕР ЗАНЯТ» (см. 54.11) и что ПКК получил начальный байт, адресованный к нему.
* Индикация моностабильности осуществляет определенную минимальную длительность (для возможности визуализации) несмотря на короткий исходный сигнал. Такой сигнал индикации обычно вырабатывается триггерным элементом и имеет минимальную продолжительность 10 мс.
50.6 Сообщение о требовании обслуживания
Индикация моностабильности*, указывающая, что из ПКК послано сообщение о требовании обслуживания или такое сообщение посылается, или он находится в состоянии ожидания возможности посылки этого сообщения (см. 54.4).
* Индикация моностабильности осуществляет определенную минимальную длительность (для возможности визуализации) несмотря на короткий исходный сигнал. Такой сигнал индикации обычно вырабатывается триггерным элементом и имеет минимальную продолжительность 10 мс.
50.7 Обход
Индикация, указывающая, что ПКК находится в режиме обхода, управляемая соответствующим значением разряда 12 регистра состояний. Эта индикация не должна зависеть от наличия подключения или действия любого внешнего устройства обхода.
51 Соединитель
Каждый последовательный крейт-контроллер должен иметь на передней панели два соединителя D-порта, как указано в разд. 31.
На поверхности передней панели, примыкающей к соединителям, должна быть предусмотрена идентифицирующая маркировка.
Соединители должны быть установлены в вертикальном положении с контактом 1 внизу.
Предпочтительный вариант маркировки D-вход и D-выход. Соединитель D-вход должен быть установлен выше, либо левее соединителя D-выхода, если смотреть спереди.
52 Другие особенности передней линии
Требования в данном разделе не исключают применения дополнительных устройств управления, индикаторов, соединителей и т.д. на передней панели ПКК, за исключением случаев, особо оговоренных. Например, дополнительные элементы на передней панели, которые могут влиять на оперативную взаимозаменяемость, должны быть запрещены на ПКК-L2.
РАЗДЕЛ 14 СОЕДИНИТЕЛЬ SGL ШИФРАТОРА
Сообщения о требовании обслуживания инициируются в ответ на сигналы заявки от МК. Поле адреса крейта этого сообщения указывает крейт источника, а SGL-поле предназначается для дальнейшего уточнения заявок в случае необходимости.
Соединенные вместе эти поля могут обеспечить прямой путь к источнику заявки или к программе математического обеспечения обработки запроса.
Основная аппаратура для инициирования сообщения о заявке и кодирования поля источника запроса рекомендуется для включения в каждый ПКК, который генерирует сообщения о запросе. Может быть предусмотрен широкий диапазон дополнительной аппаратуры либо внутри ПКК (но только не в ПКК-L2), либо в отдельных устройствах, соединенных с ПКК через соединитель для кодирующего устройства источника запроса. Эта компоновка несколько аналогична ПКК типа А1 и сортировщику заявок, используемому с параллельным каналом (см. МЭК 552).
Однако не исключено, что сообщение о требовании обслуживания может быть разрушено при передаче между источником ПКК и последовательным драйвером, в результате чего заявка не обслуживается. Для того, чтобы обнаружить необходимые заявки и инициировать сообщение о требовании обслуживания с соответствующим SGL-полем, предусмотрен тайм-аут (блокировка времени) (см. 56). Другие аспекты передачи запросов см. в разд. 5 и 47.
53 Механические требования
Каждый ПКК должен иметь соединитель с возможностью кодирования через него местонахождения источников запроса.
Через этот соединитель кодировщик принимает и передает входные и выходные сигналы, которые позволяют внешнему кодирующему устройству выбирать L-сигналы из МК, формировать из них поле источника запроса в сообщении о требовании обслуживания, обнаружить необслуженные заявки и инициировать генерацию сообщений о требовании обслуживания для нормального режима и режима, при котором имеются необслуженные запросы. Через этот соединитель передаются также сигналы, которые позволяют дополнительному контроллеру послать кодированную информацию о номере станции при выполнении командных операций.
|
Соединитель-кодировщик источника запроса, если таковой предусмотрен, должен иметь назначение контактов, показанных в табл. 11. ПКК должен генерировать сигналы на соединитель кодировщика или отвечать на сигналы от соединителя-кодировщика, как указано в данном разделе. Любой соединитель-кодировщик, используемый на ПКК, должен представлять стационарный 52-контактный элемент со штырями по ГОСТ 26.201.1. Он должен быть установлен на задней панели ПКК над соединителями магистрали крейта в зоне свободного доступа, указанного на черт. 3 ГОСТ 27080. Контакт 1 должен быть самый нижний. Эти соединители должны иметь фиксатор с винтовым запором (стационарные элементы). |
Таблица 11 - Распределение контактов SGL-соединителя
|
Сигнал |
Направление* |
Номер контакта |
Сигнал |
Направление* |
|
|
1 |
Формирование требования (ФТ) |
Вых |
2 |
L1 |
Вых |
|
3 |
Код запроса SGL E1 |
Вх |
4 |
L2 |
Вых |
|
5 |
Код запроса SGL E2 |
Вх |
6 |
L3 |
Вых |
|
7 |
Код запроса SGL Е3 |
Вх |
8 |
L4 |
Вых |
|
9 |
Код запроса SGL E4 |
Вх |
10 |
L5 |
Вых |
|
11 |
Код запроса SGL E5 |
Вх |
12 |
L6 |
Вых |
|
13 |
Внешний повтор (ВП) |
Вх |
14 |
L7 |
Вых |
|
15 |
(Зарезервирован) |
|
16 |
L8 |
Вых |
|
17 |
Запрет требования |
Вых |
18 |
L9 |
Вых |
|
19 |
Задержка (ЗД) |
Вых |
20 |
L10 |
Вых |
|
21 |
Инициирование сообщения о требовании (ИСТ) |
Вх |
22 |
L11 |
Вых |
|
23 |
Запуск таймера (ЗТ) |
Вх |
24 |
L12 |
Вых |
|
25 |
Выделенный запрос (ВЗ) |
Вх |
26 |
L13 |
Вых |
|
27 |
(Зарезервирован) |
|
28 |
L14 |
Вых |
|
29 |
Блокировка дополнительного контроллера (БДК) |
Вых |
30 |
L15 |
Вых |
|
31 |
Байтовый тактовый сигнал |
Вых |
32 |
L16 |
Вых |
|
33 |
Свободный |
Вх/вых |
34 |
L17 |
Вых |
|
35 |
Свободный |
Вх/вых |
36 |
L18 |
Вых |
|
37 |
Свободный |
Вх/вых |
38 |
L19 |
Вых |
|
39 |
Свободный |
Вх/вых |
40 |
L20 |
Вых |
|
41 |
Контроллер занят |
Вых |
42 |
L21 |
Вых |
|
43 |
Номер станции N1 |
Вх |
44 |
L22 |
Вых |
|
45 |
Номер станции N2 |
Вх |
46 |
L23 |
Вых |
|
47 |
Номер станции N4 |
Вх |
48 |
L24 |
Вх/вых |
|
49 |
Номер станции N8 |
Вх |
50 |
L-сум |
Вых |
|
51 |
Номер станции N16 |
Вх |
52 |
0В |
- |
|
* «Вых» указывает сигнал, генерируемый ПКК. «Вх» указывает сигнал, принимаемый ПКК. |
|||||
54 Сигналы у соединителя-кодировщика
Значение сигналов, проходящих через соединитель-кодировщик, указано ниже. С целью более подробного объяснения на черт. 28 дается структурная схема, поясняющая взаимодействие ПКК и устройства кодирования местонахождения источника запроса при обмене сигналами через соединитель-кодировщик.
Пример схемы взаимодействия ПКК и кодировщика
Черт. 28
54.1 Сигналы L1-L24 являются сигналами заявки на обслуживание, поступающими со станций 1-24 МК соответственно. Сигнал L24 можно рассматривать как запрос на обслуживание, генерированный внутри ПКК или кодирующего устройства. В частности, сигнал L24 может управляться разрядом 10 регистра состояния (см. 47.2). Это способ проверки процесса обработки заявок.
54.2 L-сум сигнал, поступающий от ПКК к кодирующему устройству. Он образуется сборкой ИЛИ сигналов L1-L24. Он указывает присутствие одного или более запросов независимо от их последующего возможного маскирования.
54.3 Сигналы SGLE1-SGLE5, поступающие от кодирующего устройства в ПКК, обеспечивают содержимое 5-разрядного поля, несущего информацию о местонахождении источника запроса в сообщении о требовании обслуживания.
54.4 Инициирование запроса (DM1) - это сигнал от кодирующего устройства к ПКК. Он указывает на наличие одного или более запросов после любого процесса маскирования в кодирующем устройстве. Переход этого сигнала от «0» до «1» инициирует генерацию сообщения о требовании обслуживания после того, как все условия, перечисленные в разд. 24, удовлетворены.
54.5 Выделенный запрос (SLP)
Этот сигнал управляет разрядом 16 регистра состояния (см. 47.3). Он может быть получен прямым соединением с L-сум-сигналом, когда просто указывается, что один или более L-сигналов в МК активны. Более сложное устройство кодирования местонахождения источника запроса может получить сигнал выбранной заявки из L-сигналов путем того или иного маскирования.
54.6 Формирование требования (DBSY)
Этот сигнал из ПКК указывает, что формируется сообщение о запросе. Когда DBSY = 1, устройство кодирования сигнала SGL должно зафиксировать SGLE1-SGLE5 таким образом, чтобы код SGLE не изменялся, пока передается поле SGL запроса.
54.7 Внешний повтор (ERPT)
Этот сигнал из устройства кодирования SGL указывает на присутствие необслуженного запроса. Когда ERPT = 1, ПКК генерирует 5-разрядное поле SGL, содержащее комбинацию двоичных знаков 111112 в любом сообщении о требовании обслуживания, который он передает.
54.8 Байтовый тактовый сигнал (ВСК)
Этот сигнал из ПКК в устройство кодирования SGL формируется ПКК из байтового потока. Он предусмотрен прежде всего для использования внешним таймером необслуженного запроса в устройстве кодирования SGL (см. 56.2).
|
Когда ПКК работает в побайтно-последовательном режиме, переходы от состояния «0» к «1» и от «1» к «0» тактового сигнала ВСК должны быть обусловлены соответствующими переходами тактового сигнала, полученного на входном D-порте (черт. 29а). Когда ПКК работает в поразрядно-последовательном режиме, переход от «0» к «1» байтового тактового сигнала ВСК должен быть обусловлен переходом от «0» к «1» битового тактового сигнала, полученного у входного D-порта в течение стопового бита. Переход от «1» к «0» байтового тактового сигнала ВСК должен быть обусловлен переходом от «1» к «0» битового тактового сигнала в начале периода стопового бита (черт. 29б). В обоих режимах длительность каждого состояния логического «0» и логической «1» байтового тактового сигнала ВСК должна быть не менее 0,4 Тмин, как указано в разд. 36. |
Соотношения между байтовыми тактовыми сигналами на соединителе и принимаемыми битовыми/байтовыми тактовыми сигналами
Черт. 29
54.9 Запуск таймера (STIM)
Этот сигнал от устройства кодирования SGL применяют для управления внутренним таймером ПКК.
54.10 Задержка таймерa (TIMO)
Этот сигнал является выходным для внутреннего таймера ПКК (см. 56.1) STIM- и TIMO-сигналы проходят через соединитель-кодировщик SGL, в результате чего можно сделать выбор между внутренним таймером в ПКК и внешним таймером в кодировщике - SGL/.
Пример временных соотношений этих сигналов дан на черт. 30.
Этот сигнал указывает, что ПКК находится в состоянии выполнения цикла команда/ответ. ПКК формирует CBY, когда он принимает начальный байт, адресованный ему, и поддерживает CBY до окончания передачи, т.е. до КОНЕЧНОГО байта или до непредвиденного прекращения выполнения цикла.
Соотношения между сигналами на SGL-соединителе при генерировании сообщения о требовании обслуживания
а) Длительность сигнала LAM меньше и больше периода задержки
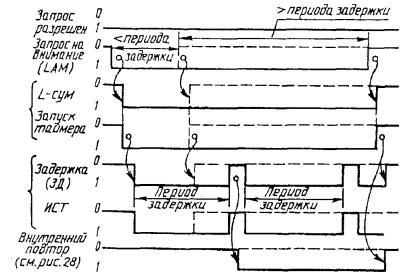
б) Аналогично а), кроме разрешения запроса после установления сигнала LAM
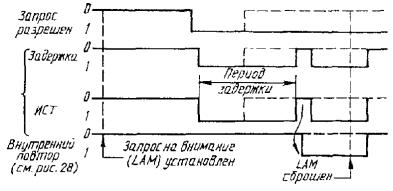
Черт. 30
54.12 Сигналы N1, N2, N3, N8, N16
Эти сигналы позволяют дополнительному контроллеру обеспечить N-поле команды на МК (см. 58.1).
54.13 Блокировка дополнительного контроллера (ACL)
Этот сигнал указывает, что ПКК требует использования МК. ПКК генерирует сигнал ACL, когда он получает адресуемый ему начальный байт, и содержит сигнал ACL до тех пор, пока не завершено выполнение команды. Этот сигнал используют для управления доступом вспомогательного контроллера к МК (см. разд. 58).
54.14 Запрет требования
Параметры сигнала «Запрет запроса», согласно указаниям в колонке «Сигналы из ПКК» в табл. 12, должны обеспечиваться на контакте 17 соединителя-кодировщика, стоящего на ПКК (табл. 11).
Сигнал «Запрет запроса» необходим для передачи его по линии «Запрет запроса» дополнительной шины управления (канала) (АСВ), используемой дополнительными контроллерами.
55 Стандарты сигнала на соединителе-кодировщике SGL
|
Все сигналы на соединителе-кодировщике SGL на ПК должны соответствовать стандартам сигналов напряжения, указанным в табл. 5 ГОСТ 27080, и стандартам источников втекающего и вытекающего тока в табл. 12. |
Эти сигналы выводятся из стандартных сигналов «Чтение» и «Запись» в МК, но с некоторыми дополнительными свойствами, связанными с определенными пассивными взаимосвязями, допустимыми у соединителя-кодировщика SGL (см. 57.1).
Эта спецификация допускает прямые связи внутри ПКК между поступающими L-сигналами в магистрали крейта (L1-L24) у станции контроллера и выходящими сигналами L1-L24 у соединителя-кодировщика SGL. Она также допускает пассивные взаимосвязи между определенными выходами из ПКК (включая L1-L24) и выходами у соединителя-кодировщика SGL. Эти входы могут быть соединены либо с L-сигналом МК через связь в ПКК, либо с выходом из логического элемента в кодировщике.
Для того, чтобы гарантировать, что каждое такое соединение имеет один и только один стационарный источник втекающего и вытекающего тока, соответствующие входы в ПКК имеют источники малых токов, а выходы из логических элементов в кодировщике имеют стандартные источники тока.
Таблица 12 - Соединитель-кодировщик SGL. Стандарты сигнала и источники тока нагрузки для всех сигналов, кроме кодированных N
|
Сигналы из ПКК |
Сигналы в ПКК |
|
|
Линия в состоянии «1» при напряжении +0,5 В Минимальный вытекающий ток (ток извлекается из линии устройством генерирования сигнала) |
L-сигналы 3,2 мА*, другие сигналы - 6,4 мА* (по шине ПКК) |
16 мА* (по шине из кодировщика) |
|
Линия в состоянии «1» при напряжении +0,5 В Минимальный ток нагрузки (ток поступает в линию с помощью устройства-приемника сигнала ) |
Каждое устройство 3,2 мА* (макс. 6,4 мА*) (подается в шину кодировщиком) |
3,2 мА (подается в шину ПКК) |
|
Линия в состоянии «0» при напряжении + 3,5 В Минимальное ограничение (ток подается в шину от ПКК) |
2,3 мА (для L-сигналов эта величина типична в отношении кодировщика и КК) |
200 мкА |
|
Линия в состоянии «0» при напряжении + 3,5 В Максимальный ток, отбираемый через шину кодировщиком |
200 мкА |
200 мкА |
|
Ограничения источников тока в ПКК |
- |
- |
|
Внутреннее ограничение источников тока (Iр) при напряжении 0,5 В |
6,0 ≤ Ip ≤ 9,6 мА* |
0,8 мА ≤ Ip ≤ 1,6 мА |
|
Внутреннее ограничение источников тока (Iр) при напряжении +3,5 В |
2,5 мА ≤ Ip* |
300 мкА ≤ Ip |
|
Ограничения источников тока в кодировщике SGL |
- |
(только для выходов) |
|
Внутреннее ограничение источников (Ip) при напряжении + 0,5 В |
- |
6,0 мА ≤ Ip ≤ 9,6 мА* |
|
Внутреннее ограничение источников тока (Ip) при напряжении +3,5 В |
|
2,5 мА ≤ Ip* |
|
* См. ГОСТ 27080. |
|
|
56 Тайм-аут при отсутствии обслуживания запросов
Внутренний таймер ПКК обеспечивает основное средство обнаружения необслуженных запросов. Выборочно кодировщик SGL может включить внешний таймер для обеспечения более сложных устройств. Соответствующие соединения через соединитель-кодировщик SGL определяют, какой таймер используют: внутренний или внешний.
Если запущено сообщение о заявке и условие заявки требует более длительного периода прерывания, внутренний или внешний таймер определяет состояние необслуженного запроса и инициирует сообщение о запросе полем SGL.
Если запрос все еще присутствует после дополнительного тайм-аута, сообщение о необслуженном запросе повторяется и т.д.
Период тайм-аут должен быть значительно длиннее времени, обычно необходимого для обслуживания запроса в определенной системе.
Сообщение о необслуженном запросе не является абсолютным указанием, что первоначальный запрос еще не обслужен. Например, простой кодировщик SGL, возможно, не способен различать первоначальную заявку и новую заявку, которая появилась в том же самом крейте. Благодаря различным задержкам в канале последовательного драйвера последний может получить сообщение о необслуженном запросе, когда он уже послал команду или команды на обслуживание заявки.
|
Каждый последовательный крейт-контроллер, способный генерировать сообщения о запросах, должен иметь внутренний таймер, обеспечивающий выбор периодов прерывания от 1 мс до 10 с. Внутренний таймер должен начать действовать, когда сигнал «запуск таймера» (STIM) от соединителя-кодировщика находится в состоянии логической «1» и запросы разрешены. Он должен продолжать работать, пока сигналы STIM и «формирование требования» не перейдут в состояние логического «0» или пока запросы не блокируются. Этот таймер не должен реагировать на временное снятие сигнала STIM во время операций в МК (например, от блока, снимающего L-сигнал в момент его адресации с некоторой командой, см. МЭК 516, пункт 5.4.1.3). Внутренний таймер должен выдать ТАЙМ-АУТ (TIMO) на соединителе-кодировщике. Сигнал TIMO должен быть в состоянии логического «0», когда таймер не работает. Когда таймер начинает работать, сигнал TIMO должен перейти в состояние логической «1», пока длится период задержки. Затем он переходит в состояние логического «0» в течение не менее 200 нс. Такая последовательность логической «1» в течение одного периода задержки, за которым следует короткое состояние логического «0», должна повторяться, пока таймер работает (см. черт. 30). Время нарастания и спада сигналов TIMO и внутренний повтор должно быть менее 100 нс. В конце первого периода задержки таймер должен установить состояние необслуженного запроса, сохранить это состояние, пока таймер работает, и обусловить формирование кода 111112 в поле SGL любых последующих сообщений. |
Для того, чтобы привести в работу внутренний таймер, предусматривается соответствующие соединения выводов с сигналами СТАРТ-ТАЙМЕРА и ТАЙМ-АУТА на соединителе-кодировщике SGL. Входной сигнал СТАРТ-ТАЙМЕРА, поступающий в ПКК, может быть получен от устройства маскировки заявки в кодировщике SGL. Более просто он может быть предусмотрен соединением выхода L-сум из ПКК к входу сигнала СТАРТ-ТАЙМЕРА.
Выходной ТАЙМ-АУТ, поступающий из ПКК, может быть соединен с входом сигнала инициирования запроса. Последующие переходы этого сигнала от «0» к «1» (в начале каждого перехода ТАЙМ-АУТА) инициируют сообщения о требовании обслуживания. Содержимое поле SGL в первом сообщении определяется кодировщиком SGL. Поэтому таймер, поддерживая состояние необслуженного запроса, обеспечивает специальное поле SGL необслуженного запроса в последующих сообщениях о требовании обслуживания.
|
Если внешний таймер, подключенный к ПКК через соединитель-кодировщик SGL, используют вместо внутреннего таймера, он должен генерировать сигнал инициирования запроса с переходами состояния от «0» к «1» в определенное время для инициирования первоначального сообщения о требовании обслуживания и некоторой последовательности сообщений о необслуженных запросах. Когда он обнаруживает необслуженный запрос, он должен генерировать либо внешний сигнал повторения для управления содержимым поля SGL, либо установить состояние логической «1» на линиях SGL 1-5. |
Внутренний таймер имеет период ТАЙМ-АУТА в реальном масштабе времени (от 1 мс до 10 с) и поэтому должен быть настроен в соответствии с частотой системных тактовых сигналов. Байтовый тактовый сигнал у соединителя-кодировщика SGL позволяет выразить период ТАЙМ-АУТА внешнего таймера в байтовых тактовых периодах и таким образом уменьшить зависимость времени задержки от частоты тактовых сигналов системы.
57 Варианты кодировщика
Самой простой формой кодировщика SGL является съемная часть соединителя с пассивными соединениями между определенными контактами. С другой стороны, специальный кодировщик SGL может обеспечить лучшие возможности для маскирования L-запросов, кодирования SGL-поля и обнаружения необслуженных запросов. Примеры таких исполнений даны ниже.
Простые взаимосвязи между L-сум выходом из ПКК и входом в СТАРТ-ТАЙМЕР и между выходом ТАЙМ-АУТ и входом инициирования запроса необходимы для использования внутреннего таймера (см. черт. 28).
Только с этими соединениями SGL-поле всех первоначальных запросов обеспечивается кодом 000002, а необслуженных запросов - кодом 111112.
Пассивные взаимосвязи, состоящая каждая из связи между одним выходом L-сигнала из ПКК и одним из пяти SGLE-входов в ПКК, могут быть использованы для ограниченного управления содержимым SGL-поля запросов.
57.2 Маскирование запросов
Простое соединение от L-сум к СТАРТ-ТАЙМЕРУ позволяет любому L-сигналу инициировать сообщение о требовании обслуживания. Более сложные SGL-шифраторы могут включать устройство маскирования L-сигналов, так что только те L-сигналы, которые прошли маску, способны инициировать. Маска может меняться командами, посланными в кодировщик SGL через МК.
57.3 Кодирование SGL-поля
В качестве примера кодировщик SGL может определить относительный приоритет L-сигналов, идентифицировать текущий запрос, который имеет наивысший приоритет, и закодировать соответственно SGL-поле через SGLE-линии.
После того как простой кодировщик-SGL инициировал запрос, он не может генерировать другой запрос (кроме сообщения о необслуженном запросе), даже если возникает новый запрос с более высоким приоритетом. Более сложный кодировщик, способный определить приоритет L-сигналов, может инициировать новый запрос, прежде чем было обслужено предшествующее сообщение о требовании более низкого приоритета.
57.4 Сообщение о необслуженном запросе
Простой кодировщик SGL может указывать ложное состояние необслуженного запроса, если уже обслужен первоначальный запрос, но одновременно с его обслуживанием появился новый запрос и сохранялся сигнал СТАРТ-ТАЙМЕР. Однако более сложный кодировщик SGL может связать состояние СТАРТ-ТАЙМЕР с определенным запросом и таким образом вернуть таймер в исходное положение, когда данный запрос снимается.
58 Обеспечение дополнительных контроллеров
Дополнительный контроллер, установленный на одной или более нормальных станциях крейта КАМАК и необходимый для генерирования команды, имеет прямой доступ к шинам субадреса (А) и функциональным шинам (F) МК, но не к шинам номера станции (N), которые доступны только через управляющую станцию занятую ПКК.
Поэтому две дополнительные особенности, не связанные с процессом обработки запросов, предусмотрены у соединителя-кодировщика SGL для того, чтобы обеспечить доступ дополнительному контроллеру к N-шинам и исключить ситуацию, когда ПКК и дополнительный контроллер одновременно выдают команду на МК.
58.1 Доступ к N-шинам
Шины N1, N2, N4, N8, N16 через соединитель кодировщика позволяют дополнительному контроллеру указать кодированный адрес номера станции. Он декодируется N-дешифратором в ПКК, чтобы установить соответствующую N-шину МК в состояние логической «1».
|
Каждый ПКК, который используется в сочетании с дополнительным контроллером, должен принять кодированные адреса номера станции у соответствующих контактов соединителя-кодировщика SGL (см. табл. 11). Кодированные адреса номера станции, представленные в ПКК через соединитель-кодировщик SGL, должны формироваться схемами с открытым коллектором. |
58.2 Сигнал блокировки дополнительного контроллера
|
Каждый крейт-контроллер, используемый в сочетании с дополнительным контроллером МК, должен иметь возможность выдать сигнал блокировки дополнительного контроллера (ACL) на соответствующем контакте соединителя-кодировщика SGL (см. табл. 11). ACL-сигнал должен перейти и состояние логической «1», когда ПКК опознает адресуемый ему заглавный байт, и должен оставаться в состоянии «1» до окончания цикла операции канала крейта (t9 черт. 9 ГОСТ 27080) или до прекращения последовательности команда/ответ, если таковое имело место раньше. |
58.3 Взаимоблокировка ПКК и дополнительного контроллера
|
В то время как сигнал блокировки дополнительного контроллера находится в состоянии логической «1», дополнительный контроллер, используемый в сочетании с ПКК, должен закончить или прекратить текущую операцию в канале крейта, прежде чем ПКК потребует использование МК. |
Чтобы выполнить это условие, дополнительный контроллер должен в ответ на сигнал блокировки этого контроллера, равный логической «1», прекратить любую начатую операцию МК, если еще не выдан стробирующий сигнал S1 (до момента t3 на черт. 9 ГОСТ 27080).
Продолжительность любой операции МК, управляемой дополнительным контроллером, связанным с ПКК, не должна быть более 1,2 мкс и не менее 1,0 мкс (от t0 до t9 на черт. 9 ГОСТ 27080).
РАЗДЕЛ 15 ИСПРАВЛЕНИЕ ОШИБОК
Работа последовательной магистрали (МП) основывается на непрерывности передачи информационных и тактовых сигналов и предназначена для применения в условиях помех. В настоящем разделе рассматривают различные средства, связанные с обнаружением ошибок и отказов и способами их исправления.
59 Отказы в линиях передачи
При передаче информации сигналы данных и тактовые сигналы проходят через последовательные крейт-контроллеры и промежуточные секции МП, которые могут включать кабели, преобразователи сигналов или модемы.
59.1 Отказы в пределах последовательных крейт-контроллеров; подключение устройств обхода
В каждом крейт-контроллере информационные и тактовые сигналы принимаются и передаются активными компонентами. Эффекты отказа этих компонентов или их источников питания могут быть ограничены применением последовательного крейт-контроллера в комбинации со специальным устройством обхода, в результате чего непрерывность сигнальных линий может быть восстановлена переключением на дублирующую линию, которая обходит поврежденный контроллер.
Устройство обхода управляется сигналом «Управление обходом», который присутствует на обоих D-портах крейт-контроллера и определяется разрядом 12 регистра состояния (см. 48.2).
Если используется внешнее устройство обхода, оно должно быть соединено между U- или D-портами одного крейта. Когда ПКК находится в состоянии обхода, внешнее устройство передает далее все поступающие сигналы последовательного канала без прохождения их через ПКК. При этом обойденный ПКК контролирует сообщения, поступающие из МП в целях приема команды, требующей снятия обхода. Пока ПКК находится в состоянии обхода, он не может передать сообщения в канал.
Когда ПКК находится в состоянии обхода, устройство обхода должно соединять входные и выходные линии канала таким образом, чтобы быть независимым от источников питания ПКК и не нарушать условия согласования в любой секции последовательного канала. Для устройства обхода, соединенного с U-портами, это последнее требование может включать приспособление, отключающее согласующие импедансы приемника сигнала. Для устройства обхода, соединенного с D-портами (которые имеют внутреннюю нагрузку на всех информационных и синхронизирующих приемниках), оно может включать промежуточные буферы с высоким входным импедансом для того, чтобы дать возможность обойденному ПКК контролировать передачу сигналов в МП.
Устройство обхода может использовать электромеханическое реле для переключения линий передачи сообщений. Поэтому оно может иметь более длительное время срабатывания по сравнению с циклом обмена команда/ответ в МП. Операция переключения может вызвать асинхронное прерывание линии сообщения последовательного канала, а следовательно, и потерю синхронизации у ПКК, расположенного ниже по потоку.
На черт. 31 показан пример применения реле для переключения одной линии передачи D-порта. Параллельные согласующие сопротивления на линии МП здесь отсутствуют, т. к. имеется переключаемое согласующее сопротивление в самом устройстве обхода и используется сбалансированный приемник-передатчик, предназначенный для исключения влияния согласующей нагрузки на входе D-порта ПКК. В полном устройстве обхода для последовательно-поразрядного режима работы через D-порты должны быть предусмотрены два таких переключающих устройства: одно - для тактового сигнала и другое - для информационного сигнала. При отключенном питании положение ключей в устройстве обхода должно быть таким, как показано на этом чертеже, с обходом ПКК и отключенной согласующей нагрузкой.
Пример переключения шунта для одного сигнала D-порта
Черт. 31
Устройство обхода может быть также соединено через U- или D-порты нескольких крейтов, но тем не менее существует определенный риск, связанный с такой компоновкой. Команда, обращенная к одному из крейтов, вызывает обход всей группы, но запрещает операции МК крейта только в этом одном крейте. Другие крейты группы могут и не чувствовать, что они шунтированы. Поэтому существует опасность, что эти другие крейты могут отвечать на команды, включающие операции МК, несмотря на то, что любые ответные сигналы, которые они генерируют, не могут достичь последовательного драйвера.
Следует принять во внимание наихудшие условия, которые могут быть созданы «обходом». Это чувствительно для последовательного драйвера или некоторого ПКК, который вызывается для того, чтобы передать или получить сигналы по основной цепи МП.
В качестве дополнительного защитного средства против отказов в системе передачи сообщения МП в пределах ПКК устройство обхода могло бы контролировать нормальную работу МП последовательного канала на выходе контроллера и автоматически переключать ПКК в состояние обхода, если эта работа будет нарушена.
59.2 Отказы в МП последовательном канале: отключение секций МП
Между последовательными крейт-контроллерами информационные и тактовые сигналы передаются по секциям МП. Эффект отказа кабелей и другого оборудования может быть ограничен с помощью крейт-контроллера в сочетании со специальным устройством отключения, в результате чего непрерывность сигнальных цепей может быть восстановлена переключением на дублирующий путь, в который не включается поврежденная секция МП.
Коммутационное устройство управляется сигналом управления отключением; это устройство находится у выходного D-порта крейт-контроллера и управляется разрядом 11 регистра состояния (см. 48.3). ПКК, который управляет коммутирующим устройством, не входит в ту часть последовательного канала, которая отключается, когда срабатывает данное устройство.
В коммутационном устройстве можно использовать электромеханическое реле для переключения линии передачи сообщения, при использовании которых время срабатывания оказывается более длительным, чем цикл обмена команда/ответ в канале передачи данных. Операция переключения может происходить асинхронно относительно синхронизации системы и тем самым вызывает потерю синхронизации в ПКК, расположенных ниже по потоку.
Устройства переключения могут быть связаны с индивидуальными крейтами или с группами крейтов, в которых они управляются последним крейтом в группе. Они могут быть использованы для переключения сигналов U-порта (предпочтительнее) или D-порта.
Фрагмент переключающего устройства (черт. 32) показывает организацию релейных контактов для переключения одного из сигналов D-порта. В полном переключающем устройстве для последовательно-поразрядных сигналов D-порта должно быть предусмотрено два таких коммутационных устройства: одно - для информационного сигнала и другое - для тактового сигнала. Этот пример предполагает, что цепь канала передачи данных проходит через все ПКК и затем возвращается в последовательный драйвер путем параллельного соединения (но не обязательно проходит через данный ПКК, хотя для этого могли бы быть использованы соединения шин 1 и 2 (см. 31.2), так что прямая и обратная части ветви доступны переключающему устройству. Переключающее устройство соединяет прямую и обратную части ветви, образуя тем самым укороченный контур и отключая остальную часть контура и соединенные с ним контроллеры. Тактовые сигналы, подводимые к отключенной части цепи, остаются таким образом в фиксированном состоянии, так что отключенные контроллеры не могут ни принять, ни передать сообщения.
Пример переключения схемы для одного сигнала D-порта
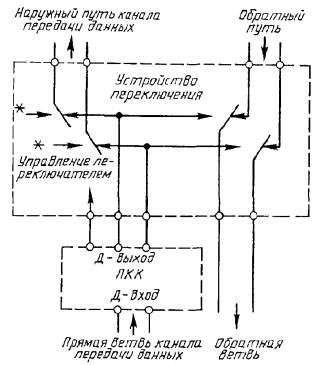
Черт. 32
Примечание - Выход тактового сигнала к отключенной части магистрали сохраняется в постоянном логическом состоянии благодаря условиям в точках *-*.
При отключении питания переключатели в устройстве отключения должны быть в таком положении, как показано на черт. 31. При этом секции МП, проходящие через данное устройство, не будут отключены.
Возможны другие варианты защиты, как, например, дублированные секции МП, в результате чего вся цепь может быть восстановлена, если имеется повреждение только одной из дублированных секций. Контакт 25 у входного D-порта каждого ПКК резервирован для третьего сигнала управления и может быть использован в более сложных способах переключения цепи.
60 Потеря синхронизации
Синхронизация сообщений зависит от способности крейт-контроллеров и последовательного драйвера распознать заглавный и разграничительные байты каждого сообщения. Ошибки в тактовых или информационных сигналах (особенно разделительные биты) могут привести к потере синхронизации сообщений. В ПКК или ПД потеря синхронизации может произойти из-за того, что в ПКК или ПД разграничительные байты приняты в искаженной форме. Поэтому в этих устройствах синхронизация сообщения может восстанавливаться теми средствами, которые описаны в разд. 40.3.
Байтовая синхронизация зависит от способности ПКК и ПД в поразрядно-последовательном режиме распознать старт/стоп биты байтовых кадров. Ошибки тактовых или информационных сигналов (в частности, в старт/стоп битах) могут привести к потере байтовой синхронизации. ПКК или ПД распознает, что потеря произошла из-за получения логического «0» в момент, когда должен появиться стоп-бит. Байтовая синхронизация может восстановиться теми средствами, которые описаны в 41.3.
61 Ошибки в передаче сигналов
Основной способ обнаружения ошибок из-за искажения тактовых или информационных сигналов - это применение кода геометрического обнаружения ошибок с байтовыми (по рядам) кодами и кодами четности по столбцам. Вспомогательный способ - это анализ формата сообщений, в частности, контекста, в котором разрешены разграничительные байты.
61.1 Принцип геометрического кода
Геометрический код обнаружения ошибок - это простой, но эффективный метод обнаружения ошибок передачи в последовательных магистралях, используемых для МП. Такой код легко применим к сообщениям различной длины и в нем используются коды четности, которые легко формируются и контролируются.
Основной принцип обнаружения геометрического кода, используемого в МП, заключается в том, что массив данных представляется в виде матрицы из т строк по п столбцов (черт. 33).
Каждая строка имеет дополнительный бит для сохранения нечетности, а каждый столбец имеет дополнительный бит для сохранения четности, в результате чего образуется увеличенный массив из т + 1 строк по п + 1 столбцов.
61.2 Формирование геометрического кода
Принцип такого формирования для использования в МП показан на черт. 34.
В данном случае биты четности bi в байте «1» сохраняют признак нечетности по всему байту, включая разделительный бит di и шесть битов поля информации от ai1 до аi6.
Таким образом:
![]() ,
,
где знак «+» обозначает функцию «Исключающее ИЛИ» (сумму по модулю 2).
Байт всегда содержит нечетное число бит с информацией «1».
В последнем байте (сумм-байт в командных сообщениях конечный и сумм-байт в сообщениях ответа и запроса) каждый из шести битов до С6 сохраняет признак четности по всему столбцу разрядов поля информации от аij до атj.
Таким образом, для столбца «j»:
Сj = а1j + а2j ... + аmj,
и столбец всегда содержит четное число бит с информацией «1».
Принцип формирования
геометрического кода обнаружения ошибок
(применение к последовательной магистрали, см.
черт. 34)
Черт. 33
Геометрический код обнаружения ошибок в применении к последовательной магистрали
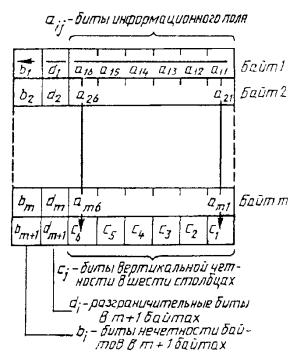
Черт. 34
Биты 7 и 8 в этом последнем байте не являются битами четности столбцов, но соответственно dm+1 - разделительный бит, а bт+1 - бит признак четности конечного байта.
Таким образом:
![]() ,
,
|
Последовательный драйвер будет генерировать правильный геометрический код обнаружения ошибки во всех адресованных командных сообщениях. Каждый ПКК будет контролировать геометрический код, детектируя ошибки во всех командных сообщениях, адресованных ему. Каждый ПКК будет генерировать правильный геометрический код во всех сообщениях ответа и запроса, которые он передает. |
Последовательный драйвер должен контролировать геометрический код и детекторную ошибку в том коде, который он принимает от ПКК.
61.3 Характеристика геометрического кода
Геометрический код обнаружения ошибки, включающий массив данных из т строк на п столбцов, требует передачи т + 1 строк по n + 1 столбцов и обладает следующими свойствами:
2) он обнаруживает любое нечетное число ошибок независимо от их распределения внутри блока;
3) он обнаруживает все группы ошибок до п + 2 битов в длину;
4) он обнаруживает большую часть ошибок, не включенных в пп. 1) - 3). Например, из всех 4-битовых ошибок в блоке он не может детектировать те, которые расположены по вершинам некоторого прямоугольника.
Характеристика геометрических кодов может быть представлена для случайной частоты появления ошибок по битам. На практике сбои в телефонных каналах не могут характеризоваться случайными независимыми шумами, и в сочетании с последовательным каналом любые сбои в разграничительных битах обнаруживаются скорее контекстом, нежели контролем по четности в столбце. Однако некоторые ориентировочные характеристики геометрического кода из восьми столбцов, примененного в условиях случайных помех, указывает на его преимущества.
Если канал связи имеет произвольную частоту появления ошибок, при которой вероятность ошибочного бита равна 10-4, то после применения процедуры обнаружения ошибки вероятность того, что массив данных содержит необнаруженную ошибку, приблизительно равна 10-13 для девяти байтовых блоков и 10-14 для трех байтовых блоков. Если вероятность битовой ошибки 10-5, вероятность того, что блок данных содержит необнаруженную ошибку, 10-17 и 10-18 соответственно для девятибайтовых и трехбайтовых блоков.
В качестве примера можно сказать, что если девятибайтовые сообщения передаются со скоростью 2000 бит/с с вероятностью появления ошибок 10-4, средняя частота ошибок в канале - 1 бит-ошибка в 5 с, но средняя частота появления блоков с необнаруженными ошибками сократится до одного массива за 104 года.
61.4 Обнаружение ошибки в контексте
В редких случаях, когда повторяющиеся ошибки не обнаруживаются геометрическим кодом, предусмотрена дополнительная защита в виде структуры сообщений, которая требует, чтобы определенные биты и поля появлялись в соответствующем порядке.
Ошибки в разграничительном бите приводят к появлению байтов в неправильном контексте и вследствие этого - к потере синхронизации (см. 40.2).
Необнаруженные ошибки в битах SF8 и SF16 поля функций команды могут привести к тому, что ПКК будет ожидать поле данных записи, когда его нет, или наоборот.
Если это произойдет, то ПКК не распознает точно четность по столбцу, и таким образом четность столбца, очевидно, будет нарушена.
Если ПКК будет выполнять соответствующий текст, то при этом могут быть выявлены необнаруженные ошибки в M1-поле команды, в результате чего крейт-контроллером будет отвергнуто нарушенное командное сообщение.
61.5 Обнаружение ошибки в блоках
Типичный функциональный блок КАМАК воспринимает некоторые субадресы и функции из полного набора. Поэтому существует возможность дополнительной защиты против ошибок, так как неверная команда, возможно, приведет к появлению ответа X = 0 либо из адресованного блока, либо из какого-то другого блока, или из незанятой станции крейта.
В особых случаях, где необходима максимальная безопасность против ложных операций в блоке из-за ошибки в команде, блок может включать дополнительные профилактические устройства. Например, блок можно спроектировать таким образом, чтобы использовалась избыточность в командах или данных для защиты против ложного выполнения особо важной команды.
62 Сообщение при обнаружении ошибки
Когда крейт-контроллер обнаруживает нарушение четности байта или столбца в полученной команде, он не может полагаться на содержание функционального поля для определения длины ответа. Поэтому ПКК генерирует ответное сообщение ОШИБКА с постоянной длиной 3 байта, в котором разряд в поле состояния, индексирующий ошибку, находится в состоянии «1». Ответ - сообщение ОШИБКА - посылается также, если в результате дополнительного теста ПКК обнаруживает не нулевое содержание МП-поля любого сообщения, адресованного ему (см. 16.7).
63 Указание об ошибке в ответах
Поле состояния в ответе содержит указание об ошибке, относящейся к выполнению ПКК текущей и предыдущей команд.
63.1 Бит, указывающий об ошибке (ERR)
Бит, индексирующий ошибку, занимает первую позицию поля состояния ответа и указывает, обнаружил ли ПКК ошибки в текущей команде в результате проверки четности байта и столбца и (возможно) M1-поля.
Если ERR = 0, команда выполняется ПКК (хотя необязательно принимается адресованным блоком). Если ERR = 1, то ПКК обнаруживает по четности ошибку (см. 61.2) или неправильное поле M1 (см. 16.7), и поэтому не выполняет команду. Ответы, в которых бит, индексирующий ошибку, находится в состоянии «1», всегда представляют собой трехбайтовое сообщение без чтения поля данных (см. табл. 13).
Тaблицa 13 - Указание ошибки в ответе
|
Сообщения об ответе |
Длина в байтах |
|||
|
Поле состояния |
||||
|
ERR |
SX |
SQ |
||
|
Правильно |
0 |
1 |
Q* |
3 или 7 |
|
Неправильно |
|
|
|
|
|
Автономный режим работы** |
0 |
0 |
0 |
3 или 7 |
|
Команда не принята** |
0 |
0 |
0 |
3 или 7 |
|
Обход |
0 |
0 |
1 |
3 или 7 |
|
Не выполнена (ошибки четности или M1-ошибка) |
1 |
0 |
0 |
3 |
|
* Ответ из адресованного модуля или контроллера. ** Эти состояния можно определить путем считывания содержимого регистра состояния. Бит 13, равный 1, указывает на автономный режим работы ПКК. |
||||
Если ПКК обнаруживает нарушение четности байта или столбца в полученной команде, то он должен установить бит, индексирующий ошибку (ERR) в поле состояния ответа, в положение «1».
Если ПКК проверяет M1-поле полученных сообщений и обнаруживает, что содержание поля не равно «00», он должен установить бит, индексирующий ошибку (ERR), в поле состояния ответа в состоянии «1» (необязательный тест).
63.2 Бит, индексирующий, что КОМАНДА ПРИНЯТА (SX)
Бит SX во 2-й позиции поля состояния соответствует ответу КОМАНДА ПРИНЯТА (X) от МК (для команд, поступающих на функциональные блоки) или от других внутренних схем ПКК (для команд, адресованных ПКК). Когда ERR-1, то это значит, что команда не выполнена, при этом бит SX не имеет значения и произвольно определяется как SX = 0 (см. табл. 13).
|
После выполнения команды ПКК должен генерировать бит SX в поле состояния ответа для указания в ответе (X), что КОМАНДА ПРИНЯТА от адресованного функционального блока или внутренней схемы ПКК. |
Возможен также случай невыполненной команды, при котором ERR = 0 и SX = 0, это может объясняться либо тем, что команда не принята блоком или схемой в ПКК, которым она адресована, либо команда требует операции канала крейта, когда ПКК в автономном режиме или в режиме обход. Эти ситуации могут быть различимы с помощью бита SQ в поле состояния ответа и бита 13 в регистре состояния (см. разд. 43).
Модули, отвечающие описанным ранее требованиям, могут дать ответ X = 0 всем командам, но можно использовать ответ X = N в целях опознания верно выполненных команд, как того требует табл. 13 (см. разд. 5.4.4 ГОСТ 27080).
63.3 Бит, индексирующий задержанную ошибку (DERR)
Бит DERR в 4-й позиции поля состояния указывает, успешно ли была выполнена предыдущая команда, полученная ПКК. Бит в положении «1» указывает, что предыдущая команда, полученная ПКК, содержала ошибку, индексированную по четности или (необязательно) неправильному МП-полю, или же, если цикл обмена КОМАНДА/ОТВЕТ был остановлен до выполнения команды, или если команда была выполнена, но не принята адресуемым модулем или устройством ПКК. Это в первую очередь связано с исправлением положения, когда сформированный ответ потерян из-за сбоев в ответной передаче или преждевременного прекращения цикла обмена КОМАНДА/ОТВЕТ.
Прежде чем завершить или прервать передачу КОМАНДА/ОТВЕТ, ПКК устанавливает бит регистра состояния, индексирующий о задержанной ошибке (DERR), в состояние логической «1», если ERR = 1 или X = 0, или обмен сообщениями КОМАНДА/ОТВЕТ прекращается преждевременно (см. разд. 46).
63.4 Биты, указывающие о задержанном ответе (DSQ, DSX)
Это - биты в регистре состояния, указывающие о задержанном ответе, когда ответ искажен или потерян. Они обеспечивают способ доступа к ответам Q и X предыдущей команды, выполненной ПКК.
Прежде чем завершить передачу КОМАНДА/ОТВЕТ, ПКК устанавливает биты о задержанном ответе (DSQ и DSX) регистра состояния, увязанные с ответами Q и X соответственного из адресованного блока или внутренней схемы ПКК (см. разд. 46).
Если передача КОМАНДА/ОТВЕТ прекращена до выполнения команды, в результате чего нет достоверных ответов Q и X, относящихся к данной команде, биты DSQ и DSX должны быть возвращены в состояние логического «0».
64 Исправление ошибки с помощью команды повторного чтения
Средство повторного чтения ПКК (см. 44.2) разрешает восстановление данных, производных от предыдущей операции чтения, но неудачно принятых в последовательный драйвер, из регистра чтения данных ПКК. Биты ERR и DERR обеспечивают информацию, необходимую для определения выбора обращения за данными чтения: в регистре чтения ПКК или в их первоначальном источнике.
После посылки команды, предназначенной для выполнения операции чтения с разрушением (такой, как чтение и сброс), к блоку или внутренней схеме ПКК последовательный драйвер может получить:
- достоверный ответ ERR = 0 и SX = 1. Имеет место операция чтения с разрушением данных, и требуемые данные находятся в поле данных чтения ответа;
- достоверный ответ ERR = 1 или SX = 0. Чтение с разрушением не произошло, и требуемые данные все еще находятся в источнике. Последовательный драйвер должен повторить команду чтения с разрушением;
- неверный ответ или никакого ответа. Бит ERR (если таковой имеется) ответа не является надежным указателем операции чтения с разрушением.
Способ исправления ошибок имеет отношение к этому последнему случаю, в котором последовательный драйвер принимает ожидаемую сокращенную команду ПКК, но не принимает достоверного ответа. При этих условиях последовательный драйвер должен посылать команду повторного чтения в ПКК (см. п. 42.2).
Если поле состояния ответа в команде повторного чтения указывает, что DERR = 1, операция чтения с разрушением не имеет место. Последовательный драйвер должен повторить операцию чтения с разрушением данных из источника.
Если ответ на команду повторного чтения указывает, что DERR = 0, то операция чтения с разрушением имела место, и требуемые данные находятся в поле данных чтения ответа на команду повторного чтения.
Эта процедура допускает исправление единственной ошибки (ошибки в ответе на исходную команду чтение с разрушением). Требуемые данные могут быть потеряны, если имеется дополнительная ошибка, например, если имеется ошибка в ответе на операцию повторного чтения.
Процедура исправления ошибки, описанная выше, применяется прежде всего к операциям чтения с разрушением, в которых на источник нельзя полагаться для получения тех же самых данных, если операция его чтения повторяется. Если последовательный драйвер не получает достоверного ответа после посылки любой другой команды (чтение без разрушения, запись или управление), возможно более простое исправление ошибки. Последовательный драйвер должен послать команду для чтения регистра состояния ПКК. Это обеспечивает информацию о предыдущей команде и дает возможность принять соответствующее решение повторить команду в случае необходимости.
РАЗДЕЛ 16 КРАТКОЕ ИЗЛОЖЕНИЕ: ПОСЛЕДОВАТЕЛЬНОСТЬ ДЕЙСТВИЙ В ПКК
Этот раздел суммирует действия последовательного крейт-контроллера при обработке получаемого байтового потока в виде переходов между девятью его основными состояниями в нормальных и ошибочных условиях. Эта информация также представлена в виде диаграмм на черт. 35 (полностью) и 36 (в упрощенной форме, опускающей все переходы, обусловленные ошибками).
ПКК имеет девять основных состояний:
- поиск заглавного байта;
- прием команды;
- выполнение команды;
- посылка ответного сообщения;
- поиск конечного байта;
- посылка сообщения о требовании обслуживания;
- потеря синхронизации байтов;
- потеря синхронизации сообщения;
- прохождение сообщения.
Последовательность основных состояний ПКК
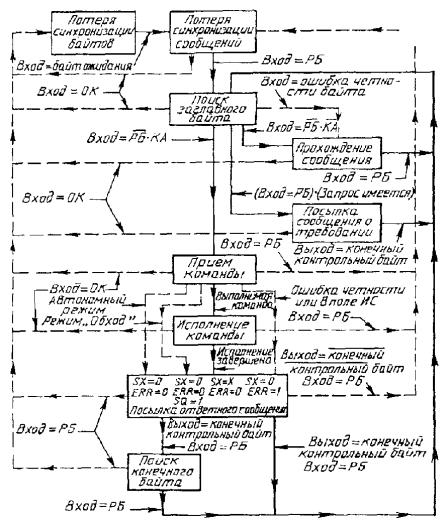
РБ - разграничительный байт; КА - крейт адресован; ОК - ошибка кадра; сплошные линии - нормальные выходы; штриховые линии - выходы в результате ошибки
Черт. 35
Последовательность основных состояний ПКК без указания переходов, обусловленных ошибками
Каждое такое состояние характеризуется:
а) условиями для входа в данное состояние;
б) байтами, принимаемыми ПКК при нормальной работе;
в) байтами, передаваемыми ПКК при нормальной работе;
г) условиями нормального выхода из данного состояния;
д) условиями выхода из состояния в результате ошибки.
65 Поиск заглавного байта
Это нормальное, пассивное состояние ПКК. ПКК принимает разграничительные байты (как правило, байты ожидания), за которым следует неразграничительный байт, рассматриваемый как заглавный байт сообщения. ПКК ретранслирует все полученные байты, включая заглавный, либо сразу либо с задержкой величины до трехбайтовых периодов. Из этого состояния существует три нормальных выхода и два выхода в результате ошибки.
65.1 Выход в состояние ПРИЕМ КОМАНДЫ
Условие. ПКК принимает неразграничительный байт с правильной побайтовой четностью и с полем адреса крейта, согласующимся с его присвоенным адресом. Это заглавный байт сообщения, адресованного ПКК.
65.2 Выход в состояние ПРОХОЖДЕНИЕ СООБЩЕНИЯ
Условие. ПКК получает неразграничительный байт с правильной байтовой четностью, но содержимое поля «Адрес крейта», которое не совпадает с адресом, приписанным данному ПКК. Этот байт трактуется ПКК как заглавный байт сообщения к (от) другому(го) крейту(а).
65.3 Выход в состояние ПОСЫЛКА СООБЩЕНИЯ о требовании обслуживания
Условие. ПКК принимает разграничительный байт, и имеются соответствующие условия для инициирования запроса.
65.4 Выход к состоянию ПРОХОЖДЕНИЯ СООБЩЕНИЯ в результате ошибки
Условие. ПКК принимает любой байт с неправильной четностью байта. Состояние ПРОХОЖДЕНИЯ СООБЩЕНИЯ используется как способ ожидания конца сообщения.
65.5 Выход к состоянию ПОТЕРЯ СИНХРОНИЗАЦИИ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в представлении байта при работе в поразрядно-последовательном режиме.
66 Прием команды
Заглавный байт командного сообщения принят и ретранслирован. ПКК принимает последовательность байтов, составляющих остальную часть команды, включая контрольный байт. ПКК передает конечный байт, за которым следуют байты ОЖИДАНИЯ (предполагается, что ретранслируется сокращенное командное сообщение, см. 13.2).
Когда ПКК принимает контрольный байт, он осуществляет контроль по четности. Существует один нормальный выход и пять выходов в результате ошибок.
66.1 Выход в состояние ИСПОЛНЕНИЕ КОМАНДЫ
Условие. ПКК принимает выполненную команду с правильными байтовой и вертикальной четностью, а также с правильным M1-полем (в случае его проверки).
66.2 Выход в состояние ПОСЫЛКА ОТВЕТА в результате ошибки (ERR = 1)
Условие. ПКК принимает команду с неправильными байтовой или вертикальной четностью, или неправильным M1-полем (в случае его контроля). Такая команда не выполняется. Ответ представляет трехбайтовое сообщение об ошибке с ERR = 1 и SX = 0.
66.3 Выход в состояние ПОСЫЛКА ОТВЕТНОГО СООБЩЕНИЯ в результате ошибки (автономный режим)
Условие. ПКК находится в автономном режиме и принимает команду с правильной четностью и M1-полем (в случае контроля), с N-полем в диапазоне от N1 до N23. Такая команда не выполняется. Ответ представляет собой сообщение с ERR = 0, SX = 0 и длиной, определяемой F-полем команды.
66.4 Выход в состояние ПОСЫЛКА ОТВЕТНОГО СООБЩЕНИЯ в результате ошибки (режим «обход»)
Условие. ПКК, находящийся в режиме обхода, принимает команду с правильной четностью и M1-полем (в случае контроля), которая не сбрасывает байт 12, управляющий обходом, в регистре состояния. Такая команда не исполняется. Ответ представляет собой сообщение с ERR= 0, SX = 0, SQ = 1 и длиной, определяемой F-полем команды.
66.5 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ СООБЩЕНИЙ в результате ошибки
Условие. ПКК принимает любой разграничительный байт. Ответ не посылается. Разряд с указанием о ЗАДЕРЖАННОЙ ОШИБКЕ DERR и регистре состояния устанавливается в состояние логической «1».
66.6 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
Ответ не посылается. Разряды с указанием о задержанной ошибке DERR в регистр состояния установлен в состояние логической «1».
67 Состояние исполнения команды
Получена выполнимая команда. Это состояние продолжается до тех пор, пока не будет выполнена требуемая операция (включая любые периоды задержки, связанные с устройствами обхода и отключения) или пока операция не будет прекращена. ПКК обычно принимает байты пробел или неразграничительные байты с правильней или неправильной четностью и передает байты ожидания. Из этого состояния имеется один нормальный и два выхода в результате ошибки.
67.1 Выход в состояние ПОСЫЛКА ОТВЕТНОГО СООБЩЕНИЯ
Условие. ПКК завершает цикл выполнения операций (по крайней мере, до того момента, когда имеются ответные сигналы Q, X и данные чтения). Это может произойти до приема первого байта «Пробел».
Ответ представляет собой сообщение с ERR = 0 и длиной, определяемой F-полем команды.
67.2 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ СООБЩЕНИЯ в результате ошибки
Условие. ПКК принимает любой разграничительный байт. Ответ не посылается. Если стадия t3 не достигнута, операция прекращается и DERR-бит (бит указания задержки ошибки) в регистре состояния устанавливается в состояние логической «1». Если стадия t3 достигнута, операция завершается, и так как ERR = 0, то DERR = X.
67.3 Выход в состояние ПОТЕРЯ БАЙТОВОЙ СИНХРОНИЗАЦИИ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
Ответ не посылается. Если момент t3 не достигнут, операция прекращается, и DERR-бит в регистре состояния устанавливается в состояние логической «1». Если момент t3 достигнут, операция завершается, и так как ERR = 0, то DERR = X.
68 Посылка ответного сообщения
Команда принимается ПКК и выполняется или отклоняется как невыполнимая. В нормальных условиях ПКК принимает байты «Пробел» (но может принимать и любой неразграничительный байт с правильной и неправильной четностью), за которыми следует конечный байт. Он передает ответное сообщение, завершающееся конечным контрольным байтом. Из этого состояния существует два нормальных выхода и два выхода в результате ошибки.
63.1 Выход в состояние ПОИСК КОНЕЧНОГО БАЙТА
Условие. ПКК передает конечный контрольный байт ответного сообщения до того, как он примет конечный байт. Это типично для режима с избыточными байтами «Пробел».
68.2 Выход в состояние ПОИСК ЗАГЛАВНОГО БАЙТА
Условие. ПКК передает конечный контрольный байт, когда принят конечный байт (или любой другой разграничительный байт).
68.3 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ СООБЩЕНИЙ в результате ошибки
Условие. ПКК принимает любой разграничительный байт прежде, чем передан конечный контрольный байт.
Передача ответного сообщения прекращается.
68.4 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
Передача ответного сообщения прекращается.
69 Поиск конечного байта
Ответное сообщение послано, но конечный байт еще не получен. Это типично для режима с добавочными байтами «Пробел». ПКК получает байты «Пробел», заканчивающиеся конечным байтом, и передает байты ожидания. Из этого состояния есть один нормальный и один выход в результате ошибки.
69.1 Выход в состояние ПОИСК ЗАГЛАВНОГО БАЙТА
Условие. ПКК получает любой разграничительный байт (как правило, конечный байт).
69.2 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
70 Прохождение сообщения
Это состояние включается из состояния ПОИСК ЗАГЛАВНОГО БАЙТА, если ПКК получил неразграничительный байт: либо достоверный заглавный байт, адресованный другому крейту, или байт с неправильной байтовой четностью. ПКК получает оставшиеся байты сообщения (необязательно соответствующие информационным полям обычных сообщений), за которыми следует разграничительный байт. Все полученные байты ретранслируются.
Из этого состояния один нормальный выход и один выход в результате ошибки.
70.1 Выход в состояние ПОИСК ЗАГЛАВНОГО БАЙТА
Условие. ПКК получает любой разграничительный байт.
70.2 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре в поразрядно-последовательном режиме работы.
71 Посылка сообщения о требовании обслуживания
ПКК получил разграничительный байт в момент, когда созданы соответствующие условия для инициирования сообщения о требовании обслуживания (см. разд. 24).
ПКК принимает любую последовательность байтов с правильной или неправильной четностью. Эти байты задерживаются в буфере в момент передачи сообщения о требовании обслуживания. Из этого состояния есть один нормальный выход и один выход в результате ошибки.
71.1 Выход в состояние ПОИСК ЗАГЛАВНОГО БАЙТА
Условие. ПКК передает конечный контрольный байт сообщения о требовании обслуживания.
71.2 Выход в состояние ПОТЕРЯ СИНХРОНИЗАЦИИ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
72 Потеря синхронизации байтов
ПКК обнаружил ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
Это снимает любую задержку, введенную при посылке предыдущего сообщения о требовании обслуживания, и ретранслирует любой произвольный поток бит, который он получает.
Начинается процедура восстановления байтовой синхронизации. Из этого состояния есть только один выход.
72.1 Выход к состоянию ПОТЕРЯ СИНХРОНИЗАЦИИ СООБЩЕНИЯ
Условие. ПКК идентифицирует полученный байт ожидания так, как описано в 41.3.
73 Потеря синхронизации сообщения
ПКК либо встретил разграничительный байт в запрещенном контексте, или требуется восстановить синхронизацию сообщения после установления байтовой синхронизации.
Он передаст любой произвольный байтовый поток, который он принимает. Начинается процесс восстановления синхронизации сообщения. Из этого состояния есть один нормальный и один выход в результате ошибки.
73.1 Выход в состояние ПОИСК ЗАГЛАВНОГО БАЙТА
Условие. ПКК получает по крайней мере один разграничительный байт.
73.2 Выход в состояние ПОТЕРЯНА СИНХРОНИЗАЦИЯ БАЙТОВ в результате ошибки
Условие. ПКК обнаруживает ошибку в байтовом кадре при работе в поразрядно-последовательном режиме.
ПРИЛОЖЕНИЕ А
ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА ПОСЛЕДОВАТЕЛЬНОГО КРЕЙТ-КОНТРОЛЛЕРА КАМАК ТИПА L2 (ПКК-L2)
А1 Интерпретация
Это приложение определяет технические и эксплуатационные характеристики рекомендуемого ПКК типа L2.
Цель его - определить ПКК-L2 таким образом, чтобы можно было использовать любой ПКК-L2 как прямую замену любого другого без влияния на нормальную работу аппаратного или математического обеспечения. Однако могут быть различия во второстепенных характеристиках, таких как внутренняя структура, элементная база, компоновка передней панели и т.д.
|
Чтобы соответствовать спецификации ПКК типа L2 крейт-контроллер должен отвечать всем обязательным требованиям данного приложения, требованиям данного стандарта (разд. 3-16) и ГОСТ 27080. ПКК типа L2 не должен иметь других признаков в дополнение к тем, которые даны в приложении и которые могли бы повлиять на его полную эксплуатационную взаимозаменяемость с другими крейт-контроллерами в соответствии с данным приложением. |
Остальные разделы данного приложения определяют обязательные требования, предъявляемые к ПКК-L2, в дополнение к тем, которые изложены в основном тексте данного стандарта.
Дополнительная информация о ПКК-L2, включая пример внутренней структуры, приведена в приложении Б.
Другие последовательные крейт-контроллеры, согласующиеся с основным текстом данного стандарта, не обязательно должны иметь все признаки ПКК-L2; они могут иметь дополнительные признаки. Однако рекомендуется, чтобы такие контроллеры были аналогичны ПКК-L2 в отношении общих признаков.
А2 Общие признаки ПКК-L2
А2.1 Габариты
|
Последовательный крейт-контроллер типа L2 должен представлять собой сменный блок преимущественно не более чем двойной ширины, по конструкции соответствующий ГОСТ 27080. |
А2.2 Соединители магистрали крейта
|
Последовательный крейт-контроллер типа L2 должен иметь соединители для подключения к управляющей станции и, по крайней мере, к одной нормальной станции. Соединения с дополнительными контактами Р1 и Р2 сквозных линий МК и с индивидуальными контактами Р3-Р7 запрещены. |
A3 Сообщения для ПКК-L2
A3.1 Форматы сообщения
|
Последовательный крейт-контроллер типа L2 должен использовать сообщения о команде, ответе и требовании обслуживания со стандартными форматами, определенными в разд. 13-15. |
A3.2 Последовательность сообщений
|
При получении, команды ПКК-L2 должен передавать сокращенное командное сообщение, состоящее только из заглавного байта и конечного байта, как показано на черт. 9 и 10. |
А3.3 Поля сообщений
|
Последовательный крейт-контроллер типа L2 должен игнорировать M1-поле команд, которые он принимает. При передаче ответного сообщения об ошибке, в котором ERR-бит поля состояния находится в состоянии логической «1», SX-бит в поле состояния должно быть в состоянии логического «0». |
A3.4 Генерирование сообщения о требовании обслуживания
|
Последовательный крейт-контроллер типа L2 должен генерировать сообщения о требовании обслуживания, упомянутые в разд. 15. Должен быть предусмотрен трехбайтовый буфер задержки (см. разд. 25). Все три байта должны быть включены в траекторию поступающих байтов, когда ПКК-L2 начинает передавать сообщение о требовании обслуживания. После передачи запроса все три байта буфера должны быть включены, когда содержание буфера состоит из трех байтов ожидания, а предшествующий байт, переданный с выходного D-порта, является разграничительным байтом. Когда ПКК-L2 обнаруживает ошибку в байтовом кадре (см. 41.2) при работе с трехбайтовой задержкой, буфер будет немедленно отключен от потока проходящих байтов. |
А4 D-порты МП на ПКК-L2
|
ПКК-L2 должен выполнять через свои D-порты поразрядно-последовательный и побайтно-последовательный режимы передачи. Он должен работать с тактовой частотой до 5,0 МГц в любом режиме. ПКК-L2 не должен иметь других портов (U-порты) в дополнение к двум D-портам. Он не должен пользоваться контактами 25-входного D-соединителя, который резервирован для третьего сигнала управления. |
А5 Внутренняя структура ПКК-L2
А5.1 Синхронизация
|
При работе в поразрядно-последовательном режиме ПКК-L2 должен обнаруживать стартовый байт каждого байтового кадра путем поиска логического «0» после состояния логической «1» в последовательности битов. Для восстановления состояния синхронизации байтов ПКК-L2, работающих в поразрядно-последовательном режиме, должны выполнить поиск байта ожидания (вместе со стартовым и стоповым битами) путем сравнения в каждом байтовом периоде последних принятых им десяти битов с форматом 1,11100000,0 (см. 41.3). Чтобы установить синхронизацию сообщения (при работе в побайтно-последовательном режиме, после установления байтовой синхронизации) ПКК-L2 принимает два последовательных разграничительных байта, если он вначале не был адресован, или один разграничительный байт, если он был адресован. |
Согласно вышеизложенному, следующий уже неразграничительный байт будет интерпретирован ПКК-L2 в качестве заглавного байта сообщения (см. 18.1).
А5.2 Регистр состояния
|
Регистр состояния ПКК-L2 по распределению разрядов должен соответствовать табл. 8. Он не должен использовать никаких бит, показанных в табл. 8, как резервированных или свободно используемых. В результате цикла команда/ответ, в котором ПКК-L2 не выполняет предписанную операцию на МК или соответствующую внутреннюю, биты DSQ и DSX в регистре состояния должны быть установлены в состояние логического «0» (см. разд. 46). |
А5.3 Выполнение команды
|
Последовательный крейт-контроллер типа L2 выполняет все команды, показанные в табл. 7, и никакие другие. Команда ЧТЕНИЕ СЛОВА ЗАПРОСОВ не выполняется, когда ПКК-L2 находится в автономном режиме. |
Таким образом, ПКК-L2 имеет регистр состояния, благодаря которому осуществляется сохранение данных операций чтения в регистре повторного чтения данных (см. 44.2) и обеспечивается доступ к набору L-сигналов МК, хранящихся в действующем или виртуальном регистре, также сохраняющем наборы LAM-заявок (см. 44.1).
А6 Особенности передней панели ПКК-L2
А6.1 Органы управления и индикаторы на передней панели
|
Последовательный крейт-контроллер типа L2 имеет все необходимые органы управления и индикаторы, рекомендуемые в разд. 13. Переключатели ПУСК и СБРОС блокированы, когда ПКК-L2 находится в автономном режиме работы. Выбор адреса крейта должен охватывать весь диапазон от 0110 до 6210 и индикатор адреса крейта должен показывать адрес в десятичном коде. |
А6.2 Другие особенности передней панели
|
Любые особенности передней панели в дополнение к тем, которые изложены в А6.1, не должны влиять на основные режимы работы. |
Это также не исключает наличия контрольных точек и т.п., связанных с обслуживанием и другими особенностями эксплуатации.
А7 Соединитель SGL-кодировщик на ПКК-L2
|
Крейт-контроллер типа L2 имеет соединитель SGL-кодировщик, установленный на задней панели, как определено в разд. 53, и с таким размещением контактов, которое дано в табл. 11. Он не использует никаких контактов «свободного пользования» в табл. 11. Для того, чтобы разрешить его применение, совместно с дополнительным контроллером, ПКК-L2 должен принимать кодированный номер станции с N-входа на N-дешифратор (см. 58.1) и должен генерировать сигнал БЛОКИРОВКА ВСПОМОГАТЕЛЬНОГО КОНТРОЛЛЕРА (см. 58.2). |
ПРИЛОЖЕНИЕ Б
ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
Дополнительная информация данного приложения не образует часть спецификации ПКК типа L2. Она состоит из диаграммы состояния и диаграммы работы, суммирующих обработку входящего байтового потока и генерацию выходящего байтового потока, а также из структурной схемы, предлагающей возможную внутреннюю структуру ПКК-L2. Они предназначены для совместимости со спецификацией и не должны рассматриваться как изменение любого из обязательных требований.
Б1 Диаграмма перехода
На черт. Б1 показаны допускаемые переходы между включенными состояниями, изображенными на диаграмме работы черт. Б2 (см. бандероль к настоящему стандарту).
Б2 Диаграмма работы
Процедура обработки байтового потока и генерирования выходящего потока определена (частично точно, частично приблизительно) обязательными признаками ПКК-L2, связанными с синхронизацией, ошибками, структурой и последовательностью сообщений.
Действия и решения, включенные в данную процедуру, показаны на черт. Б2 в виде отдельной схемы, которая соответствует диаграммам последовательности состояния в разд. 16 настоящего стандарта.
Диаграмма перехода для ПКК-L2
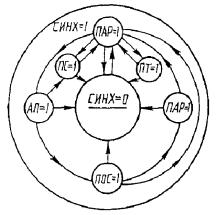
ПАР - проверка адреса разрешена (поиск заглавного байта). При нормальной работе переход в это состояние совершается сразу после обнаружения разграничительного байта; нормальное пассивное состояние ПКК; АП - адрес принят ( получение команды и выполнение команды). Переход совершается, когда ПКК получает заглавный байт, адресованный ему; ПРР - ожидание разграничителя (поиск конечного байта). Переход совершается во время ожидания разграничительного байта после того, как было послано ответное сообщение; ПТ - передача требования осуществляется (посылка требования). Переход совершается во время посылки сообщения о требовании обслуживания; ПС - сообщение проходит через ПКК (прохождение сообщения). Переход совершается, если сообщение предназначено другому ПКК или если заглавный байт имел неверную четность; ПОС - передача ответа осуществляется (посылка ответа). Переход осуществляется во время посылки ответного сообщения.
Показаны возможные переходы между ключевыми состояниями, изображенными на диаграмме работы черт. Б2 настоящего приложения. В нормальном режиме работы ПКК «СИНХ» = 1, что указывает на наличие синхронизации сообщений. Состояние «СИНХ» = 0 наступает, если происходит потеря синхронизации сообщений. (В поразрядно-последовательном режиме работы это состояние наступает, если происходит потеря синхронизации байтов). В скобках приведены соответствующие основные состояния, описанные в разл. 16 настоящего стандарта.
Элементы, обозначающие переходы по условию, дополнительно указывают, основывается ли решение о переходе на получаемом в данный момент байте, либо на предыдущем байте, либо на асинхронном событии, таком как запрос от модуля.
Данную диаграмму следует использовать при проектировании логических схем или как теоретическую модель, с которой можно сравнить работу реальных структур. Однако необязательно следовать условным обозначениям и детальной структуре схемы в целях согласования со спецификациями ПКК-L2 в приложении А.
Б3 Структурная схема
Структурная схема ПКК-L2, показанная на черт. Б3 (см. бандероль к настоящему стандарту), - специфичный пример осуществления проекта. Данную схему рекомендуется использовать при разработке его принципиальной схемы или как модель, с которой можно сравнить работу и возможности других вариантов схем. Однако совсем необязательно следовать условным обозначениям и структуре, изображенным на черт. Б3, чтобы все было согласовано с определенными ПКК-L2 в приложении А.
Следующие пункты данного приложения представляют собой объяснительный комментарий о главных особенностях данной структурной схемы. Терминология и некоторые другие детали совсем необязательно должны быть применены к другой реализации или к схеме обработки сообщений (см. черт. Б2).