МИНИСТЕРСТВО АВТОМОБИЛЬНЫХ ДОРОГ РСФСР
Государственный дорожный проектно-изыскательский и научно-исследовательский институт
ГИПРОДОРНИИ
МЕТОДИЧЕСКОЕ РУКОВОДСТВО
ПО СТРАТЕГИИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ
ПОТОКАМИ В СИСТЕМАХ АВТОМАТИЗИРОВАННОГО
РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ
МАГИСТРАЛЯХ
(АРДАМ)
Утверждено
Гипродорнии.
Протокол № 2
от 28.03.80
Москва 1980
В настоящем издании на основе опыта разработки первой
в стране системы автоматизированного управления движением на автомобильной магистрали Москва-Рига (система АРДАМ) излагаются материалы по стратегии управления транспортными потоками, которые могут найти применение при проектировании аналогичных систем.
Даны основные принципы организации движения на автомобильной магистрали, оборудованной системой АРДАМ, и описание комплекса применяемых в системе технических средств.
Приведена блок-схема объемлющего алгоритма управления, а также методическая основа контура ручного управления и модельная основа контура автоматического управления. Подробно рассмотрены алгоритмы определения допустимых скоростей, расчета управляющих программ, анализа входных сигналов, оценивания фазовых переменных транспортного потока и пропускной способности участков магистрали, синтеза корректирующих управлений. В двух приложениях приведены результаты исследования характеристик транспортного потока на автомобильных магистралях и исследования работы въезда на магистраль.
В основу настоящего издания положены результаты научных
исследований,
связанных с разработкой системы АРДАМ и проведенных в Гипродорнии в 1973 - 1978 гг. под руководством канд. техн. наук, доцента А.П. Васильева. Им осуществлено научное
редактирование издания и написаны пп. 1; 4.1; 4.4; 4.5; 5. Канд. техн. наук В.Д. Беловым написаны п.п. 1; 3; 4.1; 4.2; 5 и приложения. Канд. техн. наук М.Я. Блинкиным написаны п.п. 1; 4.1; 4.3; 4.5 - 4.9; 5, он также принял участие в подготовке
приложений. Материалы СКБ Промышленной автоматики легли в
основу п.
2 и частично использованы в п. 4.1.
Директор Гипродорнии
канд. техн. наук Е.К.
Купцов
Возрастающие объемы автомобильных перевозок, увеличение
скоростей и интенсивности движения и связанный с ними рост
числа дорожно-транспортных происшествий предъявляет новые, все более высокие требования к техническому совершенству автомобильных дорог, их инженерному оборудованию и состоянию, транспортно-эксплуатационным характеристикам и организации движения в
процессе эксплуатации. Важную роль в решении этих задач играет
создание автоматизированных систем управления движением. Первая в отечественной практике такая система - система АРДАМ - включена в проект участка МКАД - Истра автомобильной дороги Москва-Рига.
1.1. Необходимой предпосылкой создания систем управления движением на автомобильных магистралях является формирование стратегических концепций, комплекса моделей управляемого объекта и основанных на них алгоритмов переработки информации и принятия управляющих решений.
1.2. Объектами управления в этих системах являются: транспортный поток на автомобильной магистрали и транспортные потоки на въездах; состояние поверхности покрытия и обочин автомагистрали.
К средствам управления относятся управляемые многопозиционные знаки основной магистрали, знаки и светофоры на въездах и съездах, а также технические средства и ресурсы дорожно-эксплуатационной службы (аварийно-патрульной и службы зимнего
содержания).
1.3. Конечной целью управления функционированием автомобильной дороги и дорожным движением является обеспечение высокой народнохозяйственной эффективности транспортировки грузов и пассажиров путем повышения эффективности работы автомобильного транспорта и автомобильной дороги, удобств и безопасности движения.
Для отдельной дороги цель управления может быть сформулирована следующим образом:
При заданных характеристиках транспортного потока и аппарата обслуживания (т.е. постоянных и переменных параметрах автомагистрали), процесса обслуживания (т.е. характеристик уровня содержания дороги и организации движения), с учетом состояния метеорологических условий в каждый момент времени обеспечивать требуемые показатели функционирования дороги и дорожного
движения
(скорость, пропускную способность и безопасность движения), определяемые из условия минимума приведенных дорожно-транспортных затрат на перемещение грузов и пассажиров.
Исходя из этого целью управления на технологическом уровне
являются достижение удовлетворительного компромисса между задержками первого рода, в качестве которых здесь выступают задержки на въездах, и второго рода, вызванные снижением скорости
при повышении плотности транспортного потока, и уровнем безопасности движения.
1.4. Вследствие выше сказанного специфика систем управления транспортным потоком на автомобильных магистралях коренным образом отличается от получивших широкое распространение в отечественной и зарубежной практике систем светофорного регулирования в городах. Она обуславливает появление обширного круга вопросов, относящихся к стратегии управления указанным объектом, решение которых необходимо для проектирования и функционирования системы АРДАМ.
1.5. Принципиальные ограничения на стратегические концепции и конкретные алгоритмы управления обуславливаются геометрическими параметрами и транспортно-эксплуатационными характеристиками дороги, схемой организации движения и составом технических средств системы АРДАМ. В свою очередь, стратегия и алгоритмы управления оказывают влияние на выбор указанных параметров и характеристик дорог, а также методов и схем организации движения. Поэтому разработка систем автоматизированного управления и проектирование автомагистрали должны выполняться одновременно.
1.6. Формирование основных положений стратегии управления в системе АРДАМ сводится к решению следующих научно-технических задач:
постановка цели управления движением на содержательном
уровне и введение формализованного критерия качества управления;
выбор структуры объемлющего алгоритма управления;
рациональное распределение задач между контурами автоматического и ручного управления;
разработка модельной основы алгоритмов из контура автоматического управления и методической основы работы оператора
(контур ручного управления);
выбор принципов переработки макроуровневой информации о параметрах транспортного потока и использования информации о
параметрах окружающей среды и дорожных условий.
1.7. Решение большинства из перечисленных задач может быть осуществлено лишь на базе изучения характеристик транспортного потока на существующих автомобильных магистралях. Поэтому была осуществлена программа натурных экспериментов по сбору таких данных и отработка основных алгоритмов управления на их основе.
С целью уточнения предлагаемых рекомендаций для каждой
вновь проектируемой системы целесообразно проведение дополнительных исследований условий движения и параметров транспортного
потока на дорогах или участках дорог со своими характеристиками, близкими к проектируемой дороге.
*) Раздел составлен по материалам,
предоставленным СКВ Промавтоматика.
Комплекс технических средств системы АРДАМ включает в
себя устройства центрального управляющего пункта, периферийные технические средства, линии связи,
систему телевизионного обзора, систему аварийной связи, сервисное оборудование и контрольно-измерительную аппаратуру.
2.1. В состав оборудования центрального управляющего пункта входят: управляющий вычислительный комплекс, пульт управления и аппаратура обмена информации.
Управляющий вычислительный комплекс (УВК)
системы АРДАМ - специфицированный комплекс, скомпонованный на основе серийно-выпускаемой ЭВМ с использованием дополнительных модулей и устройств из номенклатуры средств вычислительной техники.
ЭВМ,
на базе которой компонуется УВК, должна удовлетворять
следующим требованиям:
возможность реализации радиальной схемы связи между периферийными устройствами и УВК;
обеспечение циклического опроса периферийных устройств с
циклом
1 раз в секунду;
осуществление управления периферийными устройствами в реальном масштабе времени;
выдерживание мультипроцессорного режима работы в реальном
масштабе времени;
обладание достаточным объемом оперативной памяти и быстродействием;
вычислительная мощность УВК должна обеспечивать развитие
системы.
В качестве базы для компановки УВК на нынешнем этапе развития техники целесообразно выбирать вычислительный комплекс
СМ-2
серии СМ ЭВМ, оперативная память которого имеет емкость до 12в К. В минимальный набор модулей и устройств вычислительного
комплекса входят: два процессора, канал прямого доступа, устройства оперативной памяти, коммутаторы, согласователь ввода-вывода и таймеры. Двухпроцессорная структура комплекса позволяет использовать разделение задач управления между процессорами и одновременное их выполнение. При выходе из строя одного из
процессоров все задачи, в соответствии с присвоенными приоритетами, будут решаться вторым процессором.
Для получения требуемой конфигурации вычислительный комплекс СМ-2 дополняется рядом модулей и устройств. Так, связь УВК с периферийным оборудованием осуществляется через
специальные дуплексные регистры (ДР) и блоки обмена информацией (БОИЦ). В состав УВК включены устройства для работы с перфоленточными носителями информации для загрузки в УВМ системных
перфолент, ввода тестовых задач при проведении профилактических и ремонтных работ, вывода перфоленточного носителя (например, после отладки программы). Для выбора и фиксирования информации на бумаге в состав УВК включен ряд устройств печати, предназначенных для обслуживания запросов оператора, вывода суточного журнала функционирования системы и различных форм документов, вывода на печать информации об отказах оборудования и режимах функционирования системы. В качестве аппаратных средств связи оператора системы с УВК используются дисплейные модули. Вывод технологической информации о функционировании системы на мнемосхему осуществляется через бесконтактные модули кодового управления, подключение которых к УВК производится через мультиплексные расширители интерфейса. В состав УВК включены также - устройства внешней памяти на магнитных дисках (4,8 Мбайта) и лентах (40 Мбайт).
2.2. Включенная в состав оборудования центрального управляющего пункта мнемосхема выполняет следующие функции:
а)
сигнализирует оператору о состоянии каждого дорожного
контроллера,
управляемого указателя направлений и скорости:
красным цветом - НЕИСПРАВНОСТЬ;
белым цветом - ОСОБЫЙ РЕЖИМ РАБОТЫ, т.е.
диспетчерское управление или ручное управление;
б)
выдает обобщенную информацию об условиях движения и
состоянии оборудования для каждого километра магистрали:
зеленый цвет - движение свободно, оборудование исправно;
желтый цвет - движение затруднено, затор или ДТП;
красный цвет - оборудование неисправно;
в)
высвечивает введенную оператором в ЭВМ информацию о
дорожных условиях (ОСАДКИ, ГОЛОЛЕД, ТУМАН, РЕМОНТ) и ДТП (АВАРИЯ) для каждого участка магистрали;
г)
высвечивает номера телефонов системы аварийной связи, с которых поступает сообщение об аварии или заторе с магистрали;
д)
информирует оператора о включенных сигналах светофоров
на каждом въезде.
Мнемосхема выполняется в виде схематического изображения магистрали с размещенными на нем индикаторами, на которой предусматриваются места для размещения телевизионных экранов, куда поступает информация с элементов магистрали, включенных в систему телевизионного обзора (в первую очередь с развязок).
2.3. Пульт управления совместно с аппаратурой обмена информации позволяет: взять на контроль и управление любое периферийное устройство, подключенное к одному (любому) каналу связи; вывести на индикацию содержание любого из байтов контрольной информации этого канала связи; осуществить контроль исправности сигнальных ламп пульта и мнемосхемы.
2.4. В состав периферийных технических средств системы АРДАМ входит ряд специализированных устройств, впервые разрабатываемых для этой системы, и устройства из состава агрегатной системы средств управления дорожным движением (АСС-УД). Из состава АСС-УД могут быть использованы: дорожные контроллеры для переключения позиций управляемого указателя направлений и управляемого указателя скорости; детекторы транспорта различных типов для определения прохождения или присутствия транспортной единицы в контролируемой зоне, времени прохождения автомобилем участка заданной длины, состава транспортного потока; периферийное устройство обмена информацией и ряд других устройств. Специально для системы АРДАМ разработаны следующие периферийные
устройства: дорожный контроллер управления въездом, выносной пульт управления, указатель скорости, управляемый указатель направлений.
2.5. Также специально для системы АРДАМ разрабатывается передвижная лаборатория КП-508, предназначенная для сбора метеорологической информации и информации о состоянии покрытия с необходимой доработкой аппаратуры приоритетного пропуска из состава АСС-УД. Указанная лаборатория собирает данные по метеорологической дальности видимости, коэффициенту сцепления и скорости бокового ветра.
2.6. В состав технических средств входит также сервисное оборудование, включающее передвижной комплект контрольно-измерительной аппаратуры, стационарный комплект диагностической аппаратуры, и контрольно-измерительная аппаратура.
3.1. Задачи организации движения
3.1.1. Организация движения на автомобильной магистрали, оборудованной системой АРДАМ, тесным образом связана со стратегией управления движением и направлена на решение задач по обеспечению
возможности движения интенсивных транспортных потоков с большими скоростями и высоким уровнем безопасности движения. В соответствии со стратегией, подробное описание которой приводится ниже,
движение транспорта на автомагистрали организуется таким образом: на магистраль производится дозированный и координированный во времени и по длине магистрали впуск автомобилей с прилегающей сети дорог. При этом количество впускаемых на каждом въезде автомобилей должно быть таково,
чтобы загрузка магистрали не превышала некоторого оптимального уровня. Поток, движущийся по магистрали, дифференцируется по скоростям, величина их определяется в системе на основе сбора данных и анализа условий движения. Производится дросселирование скоростей движения автомобилей по каждой полосе вдоль магистрали, осуществляемое в случае резкого снижения скорости либо затора в каком-либо месте магистрали, вызванного ДТП или другой причиной. Система закрывает отдельные полосы, либо участки магистрали в случае возникновения серьезных ДТП, либо заторов, а также организует обходные маршруты по прилегающей сети дорог.
3.1.2. Решение указанных задач обеспечивается планировочными мероприятиями и применением различных средств организации движения. Планировочные решения должны удовлетворять требованиям плавности изменения скоростей движения, полной ясности для водителей направления движения и соответствия траекторий движения автомобилей направлениям предназначенных для этого полос. К числу планировочных мероприятий относится устройство проезжих
частей, имеющих достаточное число полос движения, разделительных полос, развязок в разных уровнях, переходно-скоростных полос, применение вертикальных и горизонтальных кривых большого радиуса, устройство продольных уклонов, обеспечивающих движение с расчетной скоростью. Эти мероприятия заложены в проекте дороги и выполняются в процессе ее строительства.
К числу основных средств, применяемых для организации движения, следует отнести дорожные знаки, разметку, ограждающие и
направляющие устройства.
3.2. Особенности режимов движения автомобилей на автомагистралях
Характерной особенностью автомобильных магистралей является движение по ним интенсивных потоков автомобилей с высокими скоростями движения. В этих условиях резко увеличивается длина тормозного пути автомобиля; во время дождя появляется вероятность возникновения гидропланирования; возрастает воздействие бокового ветра, меняется восприятие водителем процесса
движения.
В часы «пик»
значительно усложняется управление автомобилем, так как водитель движется в плотном потоке с высокой
скоростью. Водитель вынужден удалять взгляд на значительное
расстояние от автомобиля, что является следствием увеличения тормозного пути и возникновения мелькания в глазах боковых предметов дорожной обстановки. Чтобы рассмотреть какой-либо предмет
знак или сигнал на высокой скорости водитель должен сосредотачивать на нем свой взгляд издалека, иначе у него просто не хватит времени, чтобы опознать его. Малое время, которое водитель может затратить на опознавание средств организации движения, должно учитываться при их применении.
Другой характерной особенностью режима движения на автомагистрали является многополосность. Это также затрудняет восприятие водителем информации на знаках и сигналах, осуществляющих управление движением, что накладывает отпечаток на размещение
информации и ее качество.
Однако, условия безопасности движения на автомагистралях
намного лучше,
так как нет близко идущего встречного потока, отсутствуют потоки транспорта и пешеходов, пересекающих основной поток, значительно легче производится процесс обгона. Следовательно, на автомобильных магистралях применяется ограниченное количество предупреждающих и запрещающих знаков и возрастает роль информационно-указательных знаков и знаков сервиса.
3.3. Особенности применения дорожных знаков
Дорожные знаки, применяемые на автомобильной магистрали, оснащенной системой АРДАМ, могут быть как с постоянной информацией, так и с переменной. При этом для оперативного управления движением используются только знаки с переменной информацией.
3.3.1. Из числа предупреждающих знаков чаще всего используется знак 1.8 «Светофорное регулирование», который устанавливается перед светофорами, регулирующими въезд на автомагистраль.
3.3.2. Из знаков приоритета применяются знаки: 2.1 *)«Главная дорога», 2.2 «Конец главной дороги» и 2.4 «Уступите дорогу», устанавливаемые на развязках для организации движения в местах слияния транспортных потоков, а в местах въездов на магистраль у светофоров - знак «Уступите дорогу».
*) Здесь и далее номера знаков указаны в соответствии с ГОСТ 10807-78 «Знаки дорожные. Общие технические условия».
3.3.3. Из запрещающих знаков применяются знаки 3.1 «Въезд запрещен», устанавливаемые в конце участков, на которых организовано одностороннее движение, но возможен ошибочный въезд со встречного направления, а также знак 3.24 «Ограничение максимальной скорости», размещенные на съездах в конце полос замедления. Величина скорости выбирается исходя из геометрии съезда и качества покрытия.
3.3.4. Из группы предписывающих знаков наиболее часто применяются следующие:
4.1.1 - «Движение прямо» устанавливается на магистрали перед въездами на нее в начале полосы ускорения, а также в местах примыканий, где повороты могут служить причиной выезда на съезды с односторонним движением навстречу потоку;
4.1.2 - «Движение направо» размещается в местах выезда с АЗС и других объектов на проезды с односторонним движением;
4.2.1 - «Объезд препятствия справа» устанавливается на развязках в местах разветвления потоков, движущихся в противоположных направлениях.
3.3.5. Наиболее представительная группа знаков на магистралях - информационно-указательные. Среди них чаще всего применяются знаки:
5.1 - «Автомагистраль» устанавливается с табличкой 7.1.1 перед ближайшим к началу на автомагистрали местом разворота или перекрестком, а также с табличкой 7.1.3 или 7.1.4 перед съездами на магистраль;
5.2 - «Конец автомагистрали» применяется в конце автомагистрали и в начале съездов с нее, а также предварительно с табличкой 7.1.1 на расстоянии 400 и 1000 м от конца автомагистрали;
5.18 - «Рекомендуемая скорость» указывает величину скорости, с которой рекомендуется движение на данном участке дороги;
5.20.1 и 5.20.2 - «Предварительный указатель направлений» служат для указания направлений движения к населенным пунктам или другим объектам. Знак 5.20.1 устанавливается на расстоянии не менее 300 м от начала полосы замедления на развязках и повторяется не менее чем за 800 м до начала полосы замедления. Знак 5.20.2 размещается над проезжей частью непосредственно перед началом полосы замедления;
5.21.1 - «Указатель направлений» применяется на развязках автомагистрали в местах разделения транспортных потоков;
5.24 - «Начало населенного пункта» и 5.25 «Конец населенного пункта» устанавливаются в начале и конце участков автомагистрали, проходящих по территории населенного пункта;
5.26 - «Наименование объекта» дается непосредственно перед объектами, через которые или рядом с ними проходит автомагистраль;
5.27 - «Указатель расстояний» применяется для указания расстояний до населенных пунктов, расположенных на маршруте. Он устанавливается на выездах из городов и других крупных населенных пунктов, а также между ними не реже, чем через 40 км;
5.28 - «Километровый знак» применяется для указания расстояния от места его установки до одного из конечных пунктов маршрута. Устанавливается через каждый километр на разделительной полосе или с правой стороны дороги для каждого направления движения;
5.29.1 - «Номер маршрута» указывается в начале дороги и повторяется через 15 - 20 км, а знак 5.29.2 - перед развязками;
5.33 - «Стоп-линия» устанавливается при всех въездах на магистраль у светофоров, где транспорт останавливается при запрещенном сигнале. Он дублирует разметку 1.12 и размещается справа от дороги, непосредственно в створе нанесения разметки 1.12.
3.3.6. На магистрали, как правило, должен предусматриваться целый комплекс знаков, информирующих водителей об объектах сервиса. Размещение и номенклатура этих знаков зависят от места расположения отдельных объектов и видов обслуживания.
Знаки сервиса устанавливаются непосредственно у объектов, у мест поворота к ним, если они расположены в стороне от дороги, в последнем случае на знаке должно указываться направление
движения к объекту и расстояние до него. Знаки сервиса должны размещаться предварительно за 60 - 80, 15 - 20 км и 400 - 800 м от обозначаемого объекта. В этом случае на знаках должно указываться расстояние до объекта.
3.3.7. Применяемые на автомагистрали знаки имеют увеличенные размеры по сравнению со знаками на дорогах с двумя и тремя полосами движения. Так, сторона треугольника предупреждающих знаков составляет 1,2 м, а диаметр запрещающих и предписывающих знаков - 0,9 м.
Знаки индивидуального проектирования, устанавливаемые на автомагистрали, также имеют существенные отличия от таких же
знаков,
применяемых на других дорогах. В частности фон знаков 5.20.1 и
5.20.2 при указании на них нескольких направлений движения должен быть зеленого цвета. На этих знаках надпись, содержащая название населенного пункта или объектов, движение к которым осуществляется не по автомагистрали, должна быть выполнена на вставке с синим фоном, а при установке такого знака в пределах населенного пункта наименования объектов этого населенного
пункта выполняются на вставке с белым фоном.
Знак
5.20.2 при указании на нем одного направления движения должен иметь: зеленый фон, если указывается направление движения к населенному пункту или объекту, движение к которому осуществляется по автомагистрали, синий
- если движение осуществляется не по автомагистрали, белый
- если указанные объекты
находятся в населенном пункте. Такие знаки с зеленым фоном обычно устанавливаются над основными полосами движения, а с синим и белым - над переходно-скоростными полосами для потоков, уходящих с магистрали.
Знаки
5.21.1 должны иметь зеленый фон, если движение к указанным на них населенным пунктам или объектам осуществляется по автомагистрали, синий,
если движение осуществляется по другим дорогам, и белый,
если указанные на знаке объекты расположены в населенном пункте.
Знаки
5.24 «Начало населенного пункта», 5.25 «Конец населенного пункта», 5.26 «Наименование объекта», 5.27 «Указатель расстояний», 5.28 «Километровый знак», 5.29.1 и
5.29.2 «Номер маршрута» должны на автомагистрали также иметь зеленый фон.
Высота шрифта, которым выполняются надписи на знаках
5.20.1, 5.20.2, 5.21.1
- 5.27, предназначенных для установки на
автомагистрали, должна быть равна 400 или
500 мм.
Наличие на автомобильной магистрали системы АРДАМ обуславливает применение управляемых знаков со сменной информацией. Номенклатура таких знаков зависит от задач, решаемых в каждой
конкретной системе, но чаще других это знаки, ограничивающие максимальную скорость, либо рекомендующие движение с определенной скоростью, а также предварительные указатели направлений.
В случаях, когда автомагистраль освещена, должны применяться знаки с внутренним освещением.
3.4. Особенности применения разметки
Условия движения по автомагистрали отличаются от условий
на обычных дорогах, поэтому применяемая на ней разметка имеет
ряд особенностей. Одной из характерных особенностей является
то, что на магистрали применяются не все линии разметки, а чаще всего следующие линии для обозначений:
1.2*) - края проезжей части;
*) Здесь и далее номера линий разметки даны в соответствии с ГОСТ 13508-74 «Разметка дорожная».
1.5 - границ полос движения;
1.8 - границы между полосой разгона или торможения и основной полосой проезжей части;
1.9 - полос, предназначенных для реверсивного движения в случаях, когда магистраль не имеет разделительной полосы;
1.12 - места остановки автомобилей на въездах у светофоров, в случае регулирования съезда на магистраль;
1.16 - направляющих островков в зоне развязок;
1.22 - номера дороги или маршрута;
2.4 - направляющих столбиков;
2.5 и 2.6 - боковых поверхностей дорожных ограждений;
1.3 - для разделения транспортных потоков противоположных направлений в случаях, когда автомагистраль не имеет разделительной полосы и
1.11 - попутных направлений в случаях примыкания к проезжей части магистрали дополнительной полосы, чтобы исключить ее блокирование автомобилями, движущимися по правой полосе;
1.18 - для указания разрешенных направлений движения по полосам.
Важным фактором, который должен учитываться при применении на автомагистрали дорожной разметки, является обеспечение ее
видимости при высокой скорости движения. С этой целью на автомагистралях, не имеющих искусственного освещения, применяется разметка, обладающая световозвращающими свойствами, дальность видимости которой в несколько раз выше обычной разметки. Кроме того, ширина линий, обозначающих край проезжей части, берется в 2 раза шире (0,2 м), чем на обычных дорогах.
Учитывая высокую скорость движения, размеры штрихов и разрывов между ними у линий разметки 1.5, 1.8
и 1.11 берутся максимальными.
Одной из наиболее важных особенностей применения разметки
на магистрали является использование износоустойчивых материалов с тем, чтобы сохранить достаточно продолжительный срок службы разметки в условиях интенсивного движения. Для этого,
как правило, применяются термопластики, либо краски типа «Пластирут» (рис.
1).
Рис. 1. Износоустойчивость разметки из различных материалов:
1 - краски на основе алкидных смол;
2 - краски на основе алкидных смол и хлоркаучука;
3 - краски на основе хлоркаучука;
4 - термопластики
3.5. Особенности применения светофорной сигнализации
На автомобильной магистрали, оснащенной системой автоматизированного управления движением, могут применяться два типа светофоров. Один из них предназначен для регулирования движения по основным полосам, а второй устанавливается на въездах.
Регулирование движения по полосам осуществляется с помощью
светофоров типа
3*). Оно применяется с целью закрытия отдельных
участков полос движения при возникновении на них ДТП. Регулирование движения может применяться не по всем полосам, а лишь по предназначенным для реверсивного движения. Введение реверсивного регулирования обычно должно производиться при одновременном
наличии следующих условий:
интенсивность движения в час «пик»
составляет более 500 ед./ч на каждую полосу проезжей части в более загруженном направлении;
суммарная интенсивность движения в час «пик»
в прямом направлении превышает интенсивность встречного движения более
чем на
500 ед./ч; указанная неравномерность движения систематически изменяется по направлениям в течение суток или по дням
недели;
проезжие части, предназначенные для различных направлений
движения,
не отделены друг от друга разделительной полосой.
*) Классификация светофоров соответствует ГОСТ 23457-79 «Технические средства организации дорожного движения. Правила применения».
Светофоры типа 3 устанавливаются в начале полосы (над ней)
и повторяются таким образом, чтобы расстояние между этими светофорами обеспечивало видимость водителями транспортных средств
сигналов не менее двух последовательно расположенных светофоров.
Регулирование въездов осуществляется с помощью обычных
трехсекционных светофоров типа I,
которые в случае однополосного въезда устанавливаются на правой стороне въезда. Если въезд осуществляется по двум полосам одновременно, то один светофор устанавливается на колонке у правой полосы, а второй (дублирующий) подвешивается над левой полосой. В случае, когда на двухполосном въезде каждая полоса работает самостоятельно, то светофоры размещаются над каждой полосой.
3.6. Организация движения по магистрали
3.6.1. В соответствии с задачами организации движения на автомобильной магистрали транспортный поток дифференцируется по скоростям движения, что позволяет наиболее полно использовать динамические качества автомобилей и создает для водителя возможность двигаться в наиболее удобном для него режиме. Наличие многополосной проезжей части позволяет выделить для групп автомобилей, движущихся с различными скоростями, самостоятельные полосы движения, что осуществляется с помощью линий разметки.
Величина скорости, рекомендуемая для автомобилей на каждой полосе, определяется в системе по алгоритмам, изложенным ниже, в зависимости от условий движения по магистрали (погодные условия, загрузка магистрали, наличие ДТП и заторов) и доводится до сведения водителей путем размещения над каждой полосой
знаков,
которые повторяются по всему протяжению магистрали
через некоторое расстояние. Оптимальная его величина была определена экспериментально, путем наблюдения за движением автомобилей по участкам дороги, на которых производилось управление
скоростью по каждой полосе движения (см. приложение 1). Было получено, что независимо от полосы и величины скорости оптимальным расстоянием повторения знаков является 1,5 - 2,0
км, так как
при большем расстоянии водители не соблюдают ограничений скорости (см. рис. 4, прилож. 1).
3.6.2. В случае воздействия неблагоприятных погодных условий, заторов или ДТП возникает задача снижения скорости движения либо закрытия отдельного участка магистрали. При этом целесообразно такое снижение скорости производить постепенно по отдельным тактам с таким расчетом, чтобы оно осуществлялось
плавно и не было бы двух соседних участков магистрали с высокой разницей скоростей движения (рис. 2).
Рис. 2. Потактное снижение скорости
по полосам магистрали
Закрытие движения по отдельным участкам полос осуществляется с помощью светофоров. Для этого необходимо, чтобы над каждой полосой в местах размещения знаков, регламентирующих скорость движения, были и светофоры.
3.6.3. Организация движения на въездах на автомагистраль может быть осуществлена различными способами в зависимости от интенсивности движения, возможностей получения оперативных данных об изменении характеристик транспортного потока и желаемой степени автоматизации управления въездом.
В самых простых случаях в часы «пик»
въезд может быть закрыт на некоторое время. Этот метод применяется обычно, когда поток, движущийся по магистрали, равен ее пропускной способности и лишняя доза транспорта, въезжающего на магистраль, может привести к затору.
В случаях, когда поток на магистрали достаточно высокий, но он еще не приближается к величине пропускной способности, может применяться дозированный впуск по жесткой программе. Программы могут меняться во времени, но суммарный поток на магистрали
и въезде не должен превышать ее пропускную способность.
В случаях, когда с помощью детекторов собирается информация о характеристиках транспортного потока на магистрали перед
въездом,
могут быть использованы различные методы организации
движения,
реагирующие на случайное изменение этих характеристик. К ним,
в частности, относятся:
метод анализа спроса и пропускной способности, при котором автомобилям по одному разрешается въезд на магистраль в моменты, когда спрос не превышает пропускной способности магистрали;
метод контроля занятости участка магистрали перед въездом, когда для различного уровня занятости подсчитывается возможная
доза впуска на магистраль;
метод замера интенсивности движения на крайней полосе, при котором количество впускаемых автомобилей на магистраль за
единицу времени зависит от интенсивности на крайней (правой) полосе;
метод поиска приемлемого интервала, когда автомобилям разрешается въезд на магистраль в интервалы между автомобилями на
правой полосе;
метод поиска приемлемого интервала со световой индикацией, при котором вдоль въезда устанавливается световая индикация, показывающая величину приемлемого интервала и скорость его движения. Этот метод обычно применяется, когда видимость на въезде неудовлетворительна, либо его геометрические характеристики отличаются от обычных.
Самым прогрессивным методом является координированный впуск,
зависящий от параметров транспортного потока на всей магистрали, когда анализируются состояния движения на всех участках магистрали и въездах и с помощью ЭВМ принимаются решения о допустимых потоках на любом въезде, исходя из условий обеспечения минимальных задержек транспорта, максимальной пропускной способности либо другого выбранного критерия.
Организация регулируемого движения автомобилей на въездах
требует оборудования их светофорами и детекторами транспорта.
3.6.4. При высокой загрузке первой (крайней) полосы движения может возникнуть задача обеспечения входа на эту полосу автомобилей, въезжающих на магистраль. С этой целью может быть использована техника искусственного создания разрывов в потоке на первой полосе. Она заключается в том, что с помощью снижения скорости движения на этой полосе можно добиться того, что часть автомобилей с этой полосы уйдут на соседнюю полосу движения и тем самым на ней появятся интервалы, приемлемые для въезда на нее.
3.7. Организация обходных маршрутов
Несмотря на высокие технико-эксплуатационные характеристики автомобильных магистралей на них не исключены дорожно-транспортные происшествия. При этом,
как показывает практика, вследствие высоких скоростей движения эти ДТП имеют цепной характер, т.е. в них могут участвовать несколько автомобилей, следующих один за другим. Возникновение таких ДТП может вызвать полное
или частичное блокирование проезжей части и тем самым явиться
причиной серьезных заторов. Причиной заторов может быть также
чрезмерная загрузка магистрали в случае, когда не применяется ограничение потока на въездах.
Организация маршрута, обходящего участок с затором, помогает избежать роста затора
из-за прибывающих автомобилей и
тем самым снизить их задержки. Естественно, что организация обходных маршрутов возможна лишь при условии наличия параллельных дорог и сети дорог, соединяющих их с магистралью.
Возможны два варианта организации обходных маршрутов. При одном из них автомобили минуют закрытый участок магистрали по
дороге,
проходящей справа по направлению движения, а при другом - по дороге, проходящей слева. Принципиальная разница этих
вариантов заключается в том, что при первом варианте автомобили, идущие по обходу, выполняют левые повороты на дороге параллельной магистрали, а при втором - на самой магистрали по развязкам. Это важное обстоятельство должно учитываться, так как первый вариант не всегда может быть приемлем.
При организации обходных маршрутов приходится решать две
основные задачи: направление потока на съезд и информация водителей о направлении движения по обходному маршруту. Это выполняется с помощью управляемых знаков и светофоров. Первая задача решается путем постепенного снижения скорости движения по
полосам и их выравнивания, а затем постепенного закрытия основных полос движения, начиная с левой полосы (рис.
3).
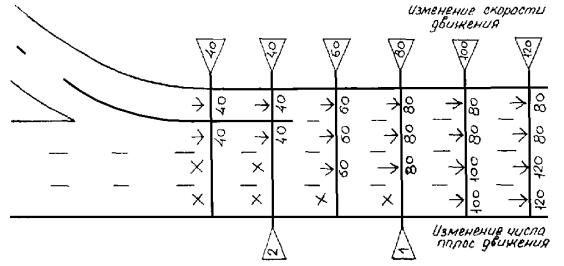
Рис. 3. Направление потока на съезд при организации обходного
маршрута
Вторая - путем установки предварительных указателей направлений
движения на всех пересечениях, где обходной маршрут меняет свое
направление
(рис. 4 и 5).
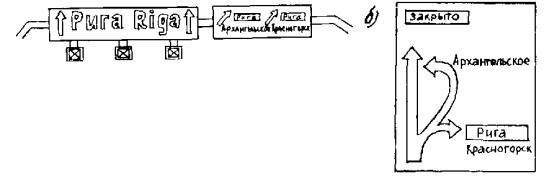
Рис. 5. Управляемые дорожные знаки, используемые для организации обходных маршрутов при закрытии участка магистрали:
а - знаки, устанавливаемые в начале переходно-скоростной полосы; б - знаки, устанавливаемые за 1000 и 500 м до съезда
4.1. Объемлющий алгоритм управления
4.1.1. Алгоритм управления транспортными потоками в системе АРДАМ построен по результатам разработок Гипродорнии и СКБ Промавтоматики, с учетом зарубежного опыта в данной области и отечественного в области городских систем управления движением. Его блок-схема приведена на рис. 6. Блоки, соответствующие объекту управления - транспортному потоку и трем основным генераторам входных переменных - транспортной ситуации на примыкающей сети, дорожным условиям на магистрали и окружающей среде, введены в целях наглядности.
4.1.2. Движение транспортного потока на автомобильной магистрали рассматривается как система обслуживания в том смысле, что в нем выделяются два взаимосвязанных, но различных элемента:
спрос на обслуживание, т.е. на пользование магистралью, который создается потоками в граничных створах магистрали, а также потоками въездов и съездов;
процесс обслуживания, обеспечиваемый аппаратом обслуживания и наделенный определенной дисциплиной обслуживания, т.е.
процесс функционирования объекта управления, параметрами которого являются фазовые переменные транспортного потока (плотности, средние пространственные скорости по полосам и участкам
магистрали и длины очередей на въездах).
Аппаратом обслуживания является при этом автомобильная
магистраль как инженерное сооружение, параметры которой, изменяющиеся под воздействием окружающей среды, также являются управляемыми.
Под дисциплиной обслуживания понимается порядок удовлетворения спроса на пользование магистралью, который устанавливается действующей в системе АРДАМ стратегией управления и реализуется
через объемлющий алгоритм управления.
4.1.3. Алгоритм состоит из контура автоматического управления и контура, замкнутого на человека-оператора.
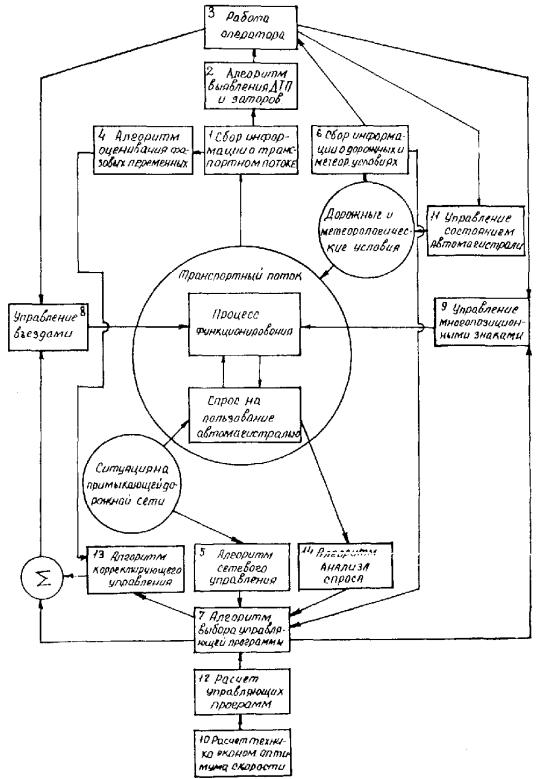
Рис. 6. Блок-схема алгоритма управления
В контуре ручного управления по предложению канд. техн. наук Васильева А.П. предусмотрен блок управления состоянием
автомобильной магистрали (блок II). Для его реализации предполагается, что в рамках системы АРДАМ дорожные службы, прикрепленные к управляемому участку магистрали, находятся в оперативном подчинении оператора системы. Все другие блоки относятся исключительно к управлению транспортным потоком.
4.1.4. Контур автоматического управления имеет сложную многоуровневую структуру. Принципиальным моментом является принятие двухуровневой схемы реализации управления:
уровень А - управляющие программы, т.е.
координированные наборы управляющих воздействий на скорости движения по автомагистрали и работу въездов, являющиеся оптимальными по заданному
критерию и рассчитанные вне реального масштаба времени для существенно различных ситуаций по спросу на пользование магистралью и (или)
условиям окружающей среды;
уровень В - рассчитываемые в реальном масштабе времени корректирующие управления. На этом уровне осуществляются реакции
управляющего алгоритма на рассогласования фактических и номинальных для программы уровня А параметров транспортного потока.
4.1.5. Различаются четыре уровня локализации управления как по масштабам координации управляющих воздействий, так и по объему релевантной информации:
уровень локального управления «0»
относится к управляющим
воздействиям,
рассчитанным для рассматриваемых изолированно
въездов и полос движения в пределах элементарного участка;
уровень локального управления «1» предполагает координацию управлений в пределах элементарного участка;
уровень координированного управления «2» предполагает управление системой последовательно расположенных въездов и
координированное задание скоростей в пределах определенного
участка магистрали (например, для всего участка МКАД-Истра);
уровень координированного управления «3» включает возможность перераспределения потоков на примыкающей сети; в частности, сброс транспортного потока с управляемого участка, формирование альтернативных маршрутов следования и т.д.
4.1.6. К блоку 1 отнесены алгоритмы первичной обработки информации о параметрах объекта управления, которые обрабатывают ежесекундно поступающую информацию с детекторов интенсивности, времени присутствия, скорости, состава движения и формируют соответствующие массивы исходных данных. Эти алгоритмы разработаны в СКБ Промавтоматика.
4.1.7. Алгоритмы блока 2, осуществляющие обнаружение заторов и дорожно-транспортных происшествий (разработаны в СКБ Промавтоматика), основаны на модели распространения ударных волн в плотном транспортном потоке. Блок замкнут на оператора. Тем самым предполагается наличие экстренных ситуаций, реакция на которые в контуре ручного управления опережает реакцию контура автоматического управления, где та же информация пройдет по каналу
Б1→Б14→Б7→Б8, Б9
или
Б1→Б4→Б13→Б8
4.1.8. С учетом необходимости реагирования на изменения условий окружающей среды (ОС), дорожных условий, а также возможности непосредственного выхода на исполнительные блоки контур, замкнутый на оператора, выглядит следующим образом:
ТП→Б1→Б2→Б3→Б8, Б9, Б11
ОС→Б6
Организация блока 3 выполнена в виде человеко-машинной
процедуры,
которая обеспечивается как набором инструкций непосредственного пользования, так и алгоритмами, обеспечивающими диалог оператора и ЭВМ. Контур ручного управления описан в п.4.2.
4.1.9. Координирующим в контуре автоматического управления является блок 7, осуществляющий выбор управляющей программы, соответствующей данному уровню спроса на пользование автомобильной магистралью (дуга 14-7), задействованной альтернативе сетевого управления (дуга 5-7) и состоянию окружающей среды (дуга 6-7). Указанный выбор происходит путем просмотра списка управляющих программ, рассчитанного вне реального масштаба времени.
Расчет управляющих программ происходит в блоке 12, который является ключевым в стратегической концепции, выдвинутой в Гипродорнии в ходе разработки системы АРДАМ. Алгоритм из блока 12, наряду с алгоритмами блоков 4 и 13, базируется на разработанных в Гипродорнии макроскопических моделях транспортного
потока.
Алгоритм использует при формировании критерия оптимальности значения скоростей по участкам и полосам магистрали, вычисленные для ситуации, соответствующей данной программе, в блоке 10 по моделям СКБ Промавтоматики. Верхние ограничения скоростей (так называемые допустимые скорости) определяют по рекомендациям п. 4.4.
4.1.10. Управляющая программа реализуется через исполнительные блоки 8 и 9. Одновременно с ней в блоке 12 вычисляется соответствующая ей оптимальная фазовая траектория объекта управления. Степень рассогласования между оптимальной и фактической траекторией определяет, в силу алгоритма из блока 13, величину корректирующего управления. Корректирующие управления реализуются путем изменения интенсивностей движения на въездах, т.е. сменой уставок соответствующих контроллеров (блок 8).
4.1.11. Алгоритм сетевого управления (блок 5), разработанный в СКБ Промавтоматики, использует информацию о транспортной ситуации на автомобильных дорогах, примыкающих к управляемому участку, и выдает решения о необходимости сброса определенных объемов движения на дорогу-дублер.
4.1.12. Блок 14 базируется на алгоритмах фильтрации и прерывания, разработанных в Гипродорнии (п. 4.6.), и алгоритме прогноза из матобеспечения АСС-УД (разработка СКБ Промавтоматика). Фактическая фазовая траектория объекта управления оценивается в блоке 4 с помощью алгоритма, разработанного в Гипродорнии и основанного на методе нелинейной фильтрации Калмана (п. 4.7.).
4.1.13. Алгоритмы блока 6 должны осуществлять идентификацию любого конкретного состояния дорожных и погодных условий на принадлежность к одному из заранее выделенных и существенно различных, с точки зрения принятия решений, классов. Необходимый материал изложен в п. 4.4. Часть информации на вход этого блока поступает от передвижной лаборатории КП-508, описанной в п. 2.
4.1.14. Важным частным случаем управляющих программ являются программы, допускающие частичную или полную декомпозицию, т.е. относящиеся к уровням локализации «0» и «1». К ним принадлежат в первую очередь алгоритмы управления отдельным въездом в различных режимах (блок 8). Этот материал разработан в СКВ
Промавтоматика и Гипродорнии.
4.2. Методическая основа контура управления, замкнутого на оператора
Важнейшая роль в обеспечении эффективного функционирования
автомагистрали принадлежит оператору. Среди задач,
решаемых им, следует выделить три, наиболее важные: наблюдение за работой
системы,
ручное управление движением и осуществление связи с
дорожными и другими организациями.
4.2.1. Наблюдение за работой системы производится оператором с целью своевременного обнаружения возмущений в транспортном потоке, вызванных заторами, ДТП, либо сложными погодными условиями, а также обнаружения неисправностей в работе систем и принятия мер по их устранению. Необходимость такого наблюдения вызвана тем, что оператор, используя систему телевизионного обзора, может на самой ранней стадии обнаружить предзаторовые ситуации, в то время как контур автоматического управления обнаружит их только при наличии существенных изменений в характеристиках транспортного потока. Оператор следит за индикацией на мнемосхеме,
сигнализирующей об исправности оборудования и состоянии погодных условий.
4.2.2. Ручное управление движением производится оператором в случае получения им информации по системе телевизионного обзора или радио о наличии на дороге затора или ДТП, образования гололеда, снежного заноса, а также при необходимости специального режима движения при пропуске спецавтомобилей. Оно может осуществляться на одном или группе въездов, а также на каком-либо участке перегона, либо на перегоне в целом.
4.2.3. Управление движением на въезде может решать две задачи: выделение наиболее благоприятных условий для транспорта, движущегося по магистрали, и предоставление приоритета транспорту, въезжающему на магистраль с боковой дороги. Решение первой задачи становится необходимым в момент, когда на магистрали возникает предзаторовая ситуация, либо затор, а также беспрепятственный пропуск по магистрали спецмашин. Вторая задача характерна для случая, когда спецмашинам необходимо обеспечить быстрый и беспрепятственный въезд на магистраль. Для этого в первом варианте по команде оператора на въезде загорается красный сигнал светофора и горит до тех пор, пока оператор не отменит команду. Во втором, наоборот, на светофоре на въезде загорается зеленый сигнал, а по магистрали на первой полосе закрывается движение либо снижается его скорость на участке, находящемся перед въездом. Организация такого движения показана на рис. 7.
Рис. 7. Схема организации движения при предоставлении приоритета транспорту, въезжающему на магистраль
4.2.4. Управление оператором движением на перегонах включает в себя управление скоростью движения и закрытие или открытие отдельных полос движения или участков магистрали. Управление скоростью движения должно осуществляться оператором в случаях получения информации, с помощью имеющихся у него средств связи (до поступления сигналов от датчиков в ЭВМ), о воздействии неблагоприятных погодных факторов либо при вероятности их скорого появления. Он может снизить рекомендуемую скорость движения как на всей дороге, так и на отдельных ее перегонах. При выборе скорости оператор может руководствоваться показаниями устройства для электрического моделирования условий и режимов движения на магистралях, либо назначать их в соответствии с рекомендациями о назначении скоростей движения при различных погодных условиях.
Закрытие оператором участка полосы движения осуществляется
в момент получения информации о возникновении на этом участке
ДТП, либо другого обстоятельства, мешающего проезду транспорта. В результате на ближайшем к закрываемому участку знаке, находящемуся над данной полосой движения, загорается сигнал в виде
двух перекрещивающихся наклонных полос красного цвета, а с помощью предыдущих знаков на этой же полосе производится снижение скорости движения до минимальной величины. Соответственно меняются величины рекомендуемых скоростей движения на знаках, установленных на соседних полосах движения (рис.
8).
Рис. 8. Схема организации движения при закрытии участка
полосы движения
Закрытие полосы движения может осуществляться оператором в случае проведения на ней ремонтных работ, а также при необходимости пропуска по ней спецмашин. Для этого на всех указателях рекомендуемой скорости движения, установленных над этой
полосой,
включается сигнал в виде двух перекрещивающихся наклонных полос красного цвета, а на указателях, размещаемых над
другими полосами, значение безопасной скорости движения. Причем, если на закрытой полосе производятся ремонтные работы, то оператор сам выбирает значения безопасной скорости движения на соседних полосах. Если же полоса закрывается для пропуска спецмашин, то величина рекомендуемой скорости выбирается ЭВМ на
основе реализуемой ею стратегией управления движением.
Закрытие участка магистрали между двумя развязками осуществляется оператором в случаях, когда на магистрали наблюдается серьезный затор, вызванный ДТП, проводятся дорожные работы, либо имеются другие причины, не позволяющие осуществлять движение транспорта. Транспортный поток по соединительным дорогам
переводится на параллельные дороги. Поскольку соединительные
дороги,
как правило, имеют небольшую пропускную способность, то пропуск по ним интенсивных потоков может осуществляться с
пониженными скоростями. Движение перед закрытыми участками организуется таким образом: производится постепенное замедление
транспортного потока с помощью указателей скорости и закрытие
основных полос движения, а с помощью изменения информации на
предварительных указателях направлений движения осуществляется
перевод потока на соединительную дорогу (см. рис. 4).
4.2.5. Взаимодействие оператора и контура автоматического управления определяется следующими принципами:
1. При любых действиях оператора контур автоматического управления осуществляет автоматическую подстройку всей совокупности управляющих воздействий под изменения, вносимые оператором. В этом случае в оптимизационной подсистеме решается та же задача оптимального управления, а управляющие воздействия, назначенные оператором, рассматриваются как дополнительные ограничения на пространство управлений.
2. Контур автоматического управления не позволяет оператору устанавливать режимы, которые для имеющихся на дороге условий движения могут быть опасными.
3. Перед закрытым участком полосы, либо участком с ограниченной скоростью должно производиться постепенное снижение скорости движения с шагом не более 20 км/час. При этом если величины скоростей по полосам перед таким участком были различны, то скорости на них сначала необходимо выровнять по меньшему значению, а затем снижать.
4. При установлении по полосам рекомендуемых различных скоростей движения их величины на соседних полосах не должны отличаться более чем на 20 км/час.
5. Закрытие оператором участка магистрали должно сопровождаться автоматической организацией обходного маршрута.
4.2.6. С целью успешного и безопасного функционирования магистрали оператор осуществляет связь с дорожными и другими организациями, обслуживающими магистраль. Такая связь особенно необходима в случаях возникновения ДТП, выпадения снега, в периоды гололеда, при повреждениях покрытия проезжей части, при падении груза на проезжую часть и т.п.
Когда оператор получает сообщение о ДТП (по радио,
с помощью телевидения или от сигнально-переговорных устройств), немедленно по телефону извещает об этом службу скорой помощи, органы ГАИ и дорожную службу. В необходимых случаях он должен вызывать техническую помощь.
При выпадении снега и образовании на отдельных участках гололеда, либо повреждении проезжей части оператор сообщает об
этом подчиненной ему дорожной службе. Если при этом оператор
самостоятельно ограничивает скорость движения, то отмену введенных им ограничений он осуществляет только после получения
информации об устранении помех движению от передвижных лабораторий или работников дорожной службы.
4.3. Модельная основа контура автоматического управления
4.3.1. Для описания транспортного потока на автомагистрали как объекта управления используется макроскопическая нелинейная модель в агрегированных переменных, отражающая его динамику, структуру локальных взаимодействий и отклик на управляющие воздействия [4]. Выбор макроскопических моделей в качестве аппарата исследования и оптимизации движения транспортного потока, т.е. моделирование феномена его коллективного поведения на уровне динамики средних, обосновывается следующими положениями:
управляющие воздействия носят коллективный характер, т.е.
предназначены не отдельному автомобилю, а их определенной пространственно-временной совокупности. Поэтому естественно рассматривать объект управления на уровне агрегированных переменных, характеризующих эту совокупность;
в теории оптимальных систем для самых различных задач
управления используется физическая методология, связанная с выявлением связей типа законов сохранения и уравнений состояний. Такие связи в транспортном потоке выявляются лишь на макроскопическом уровне;
однонаправленный плотный транспортный поток описывается на базе физико-механических аналогий, а именно в случае плотного
транспортного потока возникают наиболее содержательные и практически важные задачи управления движением.
4.3.2. В качестве фазовых переменных управляемого объекта
выбираются плотности, средние пространственные скорости и длины очередей на въездах.
Модель основана на специального вида дискретизации системы
уравнений,
состоящей из стандартного уравнения неразрывности
и уравнения состояния объекта типа сжимаемой жидкости с релаксационным членом в правой части.
Формально построенная модель является аппроксимацией системы уравнений в частных производных с помощью разностной схемы
первого порядка. С физической стороны постулируется, что значения некоторой фазовой координаты в последующий момент времени
зависят
(наряду с управляющими и входными переменными) только от значений «соседних» фазовых координат в предыдущий момент
времени, т.е. от параметров потока на участках, непосредственно примыкающих к данному. Таким образом, уравнения модели имеют
следующий вид:
 (4.1)
(4.1)
где Xij = {ρij; Vij} - пара фазовых координат - плотность и пространственная скорость потока на полосе j участка i автомагистрали;
Fij - оператор, соответствующий графу Фij, причем Ф1ij - множество индексов фазовых переменных для графа, Ф2ij - множество индексов входных переменных; Ф3ij - множество индексов управлений въездами; Ф4ij - множество индексов управлений перестроениями;
URα, UVij; ULiαβ - управляющие переменные (соответственно въездами скоростями, перестроениями);
t - дискретная переменная времени;
Δ - временный шаг модели (величина порядка - 0,01 часа);
li - пространственный шаг модели или длина
элементарного участка (порядок - 1 км).
Если
Ф2ij ≠ Æ, т.е.
на данную полосу возможен въезд, следует присоединить уравнение длины очередей Xi0:
Xi0(t + 1) = Xi0(t)
+ ΔZ+i(t) - min{ Xi0(t) + ΔZ+i(t); ΔCi(Xi-1,1(t), URi(t)} (4.2)
где Z+i - интенсивность спроса на данный въезд;
Ci+ - функция динамической пропускной способности.
Для начального участка автомагистрали вводится функция
спроса fj.
4.3.3. Операторы Fij определяются только структурным графом, а не конкретной парой индексов (i, j). При их выборе были учтены следующие механизмы макротеории транспортного потока, введенные различными исследователями на основе экспериментального изучения однонаправленного плотного потока:
закон сохранения числа автомобилей;
диаграмма «скорость-плотность»;
эффект релаксации;
-"- инерции;
-"- торможения-всасывания;
механизм смены полос по Оливеру-Лэму;
динамическая пропускная способность въезда.
В типичном случае с учетом перечисленных эффектов
уравнение
(4.1.) перепишется в виде:
 (4.3)
(4.3)
где I1ij = ρi-1,j(t)Vi-1,j(t);
I2ij = -ρij(t)Vij(t);
I3ij = -ULij,j+1(t)Pi,j,j+1ρ2ij(t)[
I4ij = -ULi,j+1(t)Pi,j+1.jρ2i,j+1(t)[
а I5, I6 выражается аналогично I3, I4 с заменой j
+ 1
на j - 1;
слагаемое инерции -

слагаемое релаксации -
 ,
,
слагаемое торможения-всасывания -

Здесь R1, R2, R3(1), R3(-1) - коэффициенты инерции, релаксации, торможения и всасывания. Формула (4.1.) раскрывается для других графов с небольшими видоизменениями.
4.3.4. Конкретные условия движения, в частности, влияние факторов окружающей среды, вводятся в модель (4.1) и (4.2) через значения динамических (Rj) параметров, в первую очередь через коэффициенты формул для Vij(ρ). Адекватность модели 4.1 и 4.2, в силу экспериментального происхождения формирующих ее элементарных механизмов, определяется выбором значений ее параметров.
Выяснение физических допустимых наборов значений параметров было произведено в ходе разработок путем сопоставления результатов численных экспериментов на ЭВМ и натурных наблюдений. Числовые параметры Piαβ и параметры зависимостей Vij(ρ) были оценены в одной процедуре с фазовыми переменными по материалам
специально проведенного эксперимента (см. приложение 1).
4.4. Определение допустимых
скоростей движения автомобилей с учетом метеорологических и дорожных условий движения
4.4.1. Величина максимально допустимой скорости по условиям безопасности движения определяется состоянием комплекса «водитель-автомобиль-дорога-среда» (ВАДС). Количественные характеристики состояния этого комплекса отражены в условиях движения, т.е. подразумевается та реальная обстановка на дороге, в которой движется автомобиль в данный момент времени.
4.4.2. Условия движения включают в себя дорожные условия, т.е. совокупность параметров и транспортно-эксплуатационных
качеств дороги, имеющих непосредственное отношение к движению, транспортный поток (состав, интенсивность, плотность) и состояние окружающей среды. Параметры, входящие в условия движения, могут изменяться в ту или иную сторону. Следовательно, существует оптимальное сочетание этих параметров, обеспечивающее наиболее эффективное функционирование комплекса ВАДС. Такое сочетание называют эталонными условиями движения. Для дорог первой категории за эталонные могут быть приняты условия движения одиночного легкового автомобиля по любой из полос при условиях движения, приведенных в табл. 1.
4.4.3. Максимальную допустимую или максимальную возможную скорость движения одиночного легкового автомобиля в эталонных условиях движения принято называть расчетной скоростью. Отклонение значений параметров от указанных в табл. 1, ведущее к снижению эффективности функционирования комплекса ВАДС, вызывает соответственное уменьшение расчетной скорости. Для сравнения максимальной безопасной скорости движения в данных условиях (Vф) с максимальной безопасной скоростью в эталонных условиях (Vэ) канд. техн. наук А.П. Васильевым предложены коэффициенты обеспеченности расчетной скорости Kрс, равные отношению этих скоростей. Если Kрс получены по отклонению какого-либо одного параметра (Xi) от эталонного, то эти коэффициенты обеспеченности расчетной скорости называют частными (Kрсxi). В основу определения итогового коэффициента обеспеченности расчетной скорости (Kрситог) положена гипотеза о наличии сложной функциональной связи между итоговым и частными коэффициентами обеспеченности расчетных скоростей:
Kрситог = f(Kрсx1, ..., Kрсxn).
В этом случае максимальная допустимая скорость движения
Vmax = KрситогVэ. (4.4.)
4.4.4. Все параметры и характеристики условий движения разделены на постоянные и переменные. К постоянным относятся параметры неизменные при смене погодно-климатических факторов: геометрические параметры дороги (если своевременно убирают снег и не создают снежных валов, уменьшающих ширину проезжей части дороги и геометрическую дальность видимости), параметры автомобиля и пр. Значения других параметров могут изменяться в довольно широких пределах. Важнейшими из этих параметров (по условиям безопасности движения) являются коэффициенты сцепления, определяющие длину тормозного пути автомобиля, метеорологическая дальность видимости (МДВ) и скорость бокового ветра.
Метеорологическая дальность видимости, м
Рис. 9. Зависимость коэффициента снижения расчетной и допустимой скорости
движения одиночного автомобиля от МДВ и коэффициента сцепления:
1 - V = 120 км/ч,
φ = 0,5;
2 - V
= 140 км/ч, φ = 0,5;
3 - V = 120 км/ч, φ = 0,3;
4 - V
= 140 км/ч, φ = 0,3
На рис.
9 представлены зависимости Kрс и Vmax от МДВ
при различных значениях коэффициента сцепления, полученные расчетно-аналитическим путем, исходя из теоретических моделей
взаимодействия автомобиля с дорогой. На рис.
10 представлены
зависимости Kрс и Vmax от скорости бокового ветра.
Таблица 4.1
Основные характеристики эталонных условий
движения
|
Система комплекса ВАДС и их параметры
|
Единица измерения
|
Величина
|
|
Эталонные
параметры
дороги
|
|
|
|
Прямой
горизонтальный
участок дороги,
продольный
уклон
|
‰
|
0
|
|
Ширина
полосы
движения
|
м
|
3,75
|
|
Ширина
обочины
|
-"-
|
3,75
|
|
в
том
числе
укрепленной
|
-"-
|
2,00
|
|
Геометрическая
видимость
|
-"-
|
750
|
|
Эталонное
состояние дороги
|
|
|
|
Покрытие
шероховатое, коэффициент
сцепления
сухого покрытия
|
-
|
0,8
|
|
То
же,
мокрого
покрытия
|
-
|
0,6
|
|
Ровность
покрытия
(просвет под
трехметровой
рейкой или
сумма
неровностей
по ПКРС-2)
|
мм
см/км
|
5
300
|
|
Сопротивление
качению
|
-
|
0,01
|
|
Эталонный
автомобиль
(Легковой
автомобиль ВАЗ-2103, ГАЗ-24)
|
|
|
|
Максимальная
скорость
|
км/ч
|
140
|
|
Ширина
колеи
|
мм
|
1345
|
|
Габаритная
ширина
|
-"-
|
1611
|
|
Длина
кузова
|
-"-
|
4073
|
|
Максимальная
мощность
двигателя
|
л.с.
|
75
|
|
Эталонные
условия погоды
|
|
|
|
Сезон
года
|
-
|
лето
|
|
Температура
воздуха
|
°С
|
20
|
|
Осадки,
интенсивность
|
мм/ч
|
0
|
|
Ветер,
скорость
|
м/с
|
0
|
|
Метеорологическая
дальность видимости
|
м
|
более
750
|
Полученные результаты относятся к движению одиночного
автомобиля.
При назначении рекомендуемых скоростей движения
потока они выступают в роли верхних ограничений.
4.4.5. По условиям безопасности для определения максимально допустимой скорости движения автомобилей в потоке (Vдоппот) в сложных метеорологических условиях может быть, с некоторыми допущениями, использована формула, аналогичная (4.4):
Vдоппот = Vэпот(ρ)Kрс, (4.5)
где Vэпот(ρ) - максимальная допустимая скорость автомобилей в
потоке при эталонных метеорологических и дорожных условиях движения;
ρ - плотность потока автомобилей. Ожидаемые зависимости Vэпот(ρ) от плотности получены на основе
натурных наблюдений на шестиполосном участке МКАД.
Рис. 10. Зависимость коэффициента снижения расчетной
и допустимой скорости движения одиночного автомобиля
от скорости бокового ветра:
1 - двигатель впереди;
2 - двигатель сзади
4.4.6. Так как дорожные контроллеры ДК-7, применяемые в системе АРДАМ для управления указателями скорости, имеют шесть значений позиций рекомендуемой скорости движения, то результаты совместной оценки по формуле (4.5) удобно представить в виде таблицы. Для этого метеорологические и дорожные условия движения разбиты на шесть зон опасности (табл. 4.2 и 4.3). Передвижная дорожная лаборатория на основании показаний приборов для определения коэффициента сцепления, МДВ и скорости бокового ветра устанавливает номер зоны и после прохождения каждого управляемого участка передает его в центр управления в виде четырехзначного двоичного кода, причем, I зоне соответствует кодовая комбинация 0001; II зоне - 0010; III зоне - 0011; IV зоне - 0100; V зоне - 0101; VI зоне - 0110.
Центр управления, располагая полученной информацией о зоне
опасности метеорологических и дорожных условий, а также информацией о плотности потока автомобилей на управляемых участках
автомагистрали,
устанавливает зону условий движения (см. табл. 4.4), которая позволяет определить значения допустимых скоростей движения (см. табл. 4.5), соответствующих четырехполосному участку автомагистрали (за первую полосу принята крайняя
правая полоса движения).
Трехполосному участку соответствует 1, 2 и
4 столбцы, двухполосному 1 и
4 столбцы - 2.5.
Таблица 4.2
Соответствие зон опасности величине метеорологической
дальности видимости и коэффициента сцепления
(при Vветра = 10 м/с)
|
Коэффициент
сцепления, φ
|
Метеорологическая дальность видимости, м
|
|
75
|
150
|
225
|
300
|
450
|
600
|
750
|
|
0,6
- 0,8
|
-
|
-
|
III
|
IV
|
V
|
V
|
VI
|
|
0,5 - 0,6
|
-
|
-
|
III
|
IV
|
IV
|
V
|
V
|
|
0,4 - 0,5
|
I
|
II
|
III
|
III
|
III
|
IV
|
IV
|
|
0,3 - 0,4
|
I
|
II
|
III
|
II
|
III
|
III
|
III
|
|
0,2 - 0,3
|
I
|
I
|
I
|
II
|
II
|
II
|
II
|
|
0 -
0,2
|
I
|
I
|
I
|
I
|
I
|
I
|
I
|
Таблица 4.3
Изменение зон опасности при различных значениях
скорости бокового ветра
|
Зоны опасности при Vветра = 10 м/с
(из табл. 4.2)
|
Скорость бокового ветра, м/с
|
|
12
|
18
|
24
|
30
|
|
VI
|
VI
|
V
|
VI
|
III
|
|
V
|
V
|
V
|
IV
|
III
|
|
IV
|
IV
|
IV
|
IV
|
III
|
Таблица 4.4
Определение зон условий движения через зоны
опасности и плотность потока автомобилей
|
Зона опасности из табл. 4.3.
|
Плотность потока, авт./км
|
|
10
|
18
|
25
|
30
|
|
VI
|
6
|
5
|
4
|
3
|
|
V
|
5
|
5
|
4
|
3
|
|
IV
|
4
|
4
|
4
|
3
|
|
III
|
3
|
3
|
3
|
3
|
|
II
|
2
|
2
|
2
|
2
|
|
I
|
1
|
1
|
1
|
1
|
Таблица 4.5
Допустимые скорости движения (км/ч)
по полосам для
различных зон условий движения
|
Зоны условий движения из табл. 4.4
|
Полосы движения
|
|
4
|
3
|
2
|
1
|
|
6
|
120
|
110
|
100
|
90
|
|
5
|
100
|
90
|
80
|
80
|
|
4
|
80
|
80
|
70
|
70
|
|
3
|
60
|
60
|
60
|
60
|
|
2
|
40
|
40
|
40
|
40
|
|
1
|
20
|
20
|
20
|
20
|
4.5. Расчет управляющих программ
Расчет программных управлений, соответствующих различным условиям движения и уровням спроса на пользование автомагистралью, является одним из важнейших моментов при проектировании систем управления движением.
4.5.1. Задача расчета управляющей программы для дачного участка автомагистрали и фиксированного отрезка времени T = NΔ формулируется следующим образом: на основе принятой модели (4.1) при параметрах, соответствующих заданным условиям движения, и переменных входа, соответствующих заданному спросу, найти управление U = {UR, UV, UL}, оптимальное в смысле принятого критерия функционирования. При этом выбор критерия функционирования должен соответствовать стратегическим целям системы управления, в частности, при высоком уровне спроса на пользование магистралью отражать неизбежный компромисс между плотностью потока и временем ожидания въезда. Критерий формализуется введением целевого функционала J{X(t), V(t)}, на управление накладываются ограничения физической реализуемости (UR - неотрицательны и целочисленны; UV - соответствуют значениям указаний скорости, содержащихся в управляемых знаках; число переключений ограничено). Помимо ограничений физической реализуемости на переменные UV накладываются ограничения по величине допустимой скорости (см. п. 4.4.).
4.5.2. Расчет программных управлений сводится к решению следующей задачи дискретного оптимального управления:
 (4.7)
(4.7)
где (4.7) - векторная запись уравнений (4.3);
Ωt - область допустимых управлений.
4.5.3. В качестве наиболее универсальных предлагаются функционалы:
 (4.8)
(4.8)
который соответствует критерию максимального потока в наиболее
«узком»
из контрольных сечений (максимальный критерий пропускной способности)
 (4.9)
(4.9)
сумма квадратичных форм от плотностей потоков и длин очередей
на въездах, которая соответствует критерию обобщенной задержки
[3]. В зависимости от конкретных условий становится оправданием
применение одного из введенных критериев. Наличие же активных ограничений на UV делает разницу между ними несущественной ввиду малости области допустимых управлений.
Во время часа «пик», когда уровень загрузки превышает оптимальный, в нормальных условиях движения следует использовать
функционал (4.8).
При этом режим движения на дороге в целом будет назначаться исходя из условий наиболее полного использования пропускной способности дороги.
Во второй характерной ситуации, когда уровень загрузки ниже оптимального и условия движения благоприятны, следует использовать функционал (4.9).
В третьей характерной ситуации - при действии неблагоприятных погодно-климатических факторов и в ночное время - ограничения на область допустимых управлений по условиям безопасности движения выступают в роли активных и по этой причине вид
целевого функционала не имеет определяющего значения.
Изложенная концепция о критериях управления была выдвинута канд. техн. наук А.П. Васильевым.
Таким, образом, управляющие программы вычисляются как решение оптимальной задачи с ограничениями. Компромисс «безопасность-задержки I рода-задержки II рода» разрешается при этом следующим образом: ограничения по безопасности движения, накладываемые условиями, имеют безусловный характер; в рамках этих ограничений вычисляются управления, оптимальные по критерию стоимостного (различные варианты суммирования задержек) или минимаксного типа (различные варианты учета пропускной
способности участка).
4.5.5. Сформулированная задача имеет большую размерность (60 - 80 в практически интересных случаях), но весьма простую структуру, задаваемую элементарными графами. Ее численное решение осуществляется с помощью комбинации известных методов: случайного поиска и локальных вариаций, причем области постоянства целевого функционала параметризуются с помощью штрафных функций. Следует отметить, что в качестве диспетчерского решения (нулевого, приближения оптимального) используется так называемые «нейтральное управление» - въезды открыты, скорости ограничены только по значениям V*(ρ), смена полос разрешена. Отличия оптимального управления от диспетчерского характеризуют преимущества координации локальных управляющих воздействий.
4.5.6. Эффективность предлагаемого алгоритма была проверена в эксперименте на ЭВМ, проведенном по реальным данным для головного участка (7,2 км) дороги Москва-Рига. Он продемонстрировал успешную работу алгоритма как в стандартных, так и в ряде экстремальных ситуаций (закрытие одной или двух полос в пределах отдельного участка).
4.6. Алгоритм анализа входных
сигналов
4.6.1. Одним из типичных случаев смены программных управлений является ситуация значительного изменения спроса на пользование автомагистралью, связанного с неравномерностью суточной интенсивности движения. Резкие перепады интенсивности в различных сечениях автомагистрали могут вызываться локальным заторами, ДТП и другими обстоятельствами, требующими оперативного вмешательства. Поэтому важной задачей управления движением является фиксация момента существенного изменения интенсивности движения на фоне ее неизбежных случайных флуктуаций. Для решения этой задачи предлагается процедура фильтрации интервальных (за такт Δ) значений интенсивности движения.
4.6.2. Процедура основана на модели Бреймана [12] для случайного процесса интервальных отсчетов J, силу которой
J(t) = Yt
+ Zt. (4.10)
Медленно меняющийся процесс Yt подчиняется условию:
E[|Δ2Yt|] ≤ β, (4.11)
где E
- оператор математического ожидания;
Δ2 - оператор второй конечной разности;
β = const.
Zt - стационарный гауссовский процесс с параметрами
E[Zt] = 0, E[Zt, Zs] = δtsσ2,
причем δts =  символ Кронекера, а отношение β/σ - мало.
символ Кронекера, а отношение β/σ - мало.
По материалам наблюдений за интенсивностью движения, проведенных на дорогах Московского транспортного узла, установлен следующий диапазон для величин β/σ: 0,001 ≤ β/σ ≤ 0,01 при Δ = 1 мин.
4.6.3. Модели (4.10), (4.11) приводятся к стандартной форме линейного стохастического разностного уравнения:
 (4.12)
(4.12)
где
В такой постановке задача фильтрации интервальных отсчетов интенсивности сводится к оценке «переменной состояния» по наблюдениям сигнала J(t) [3].
Ковариационные матрицы ω, ξ и начальной оценки равны соответственно:

где
Задача решается с помощью алгоритма фильтрации Калмана.
4.6.4. Предложенный алгоритм осуществляет разделение шкал изменений интенсивности на шкалу существенных изменений и шкалу флуктуации. На рис. 11 представлены фактическая и сглаженная траектория интервальных отсчетов для 50-минутного интервала наблюдений, произведенного на МКАД (лето 1978 г.). Сглаженные траектории соответствуют h = 0,0001 и h = 0,00001.
Рис. 11. Сглаживание случайного процесса интервальных отсчетов
4.6.5. Оптимальные значения параметров фильтра определялись на материале реальных данных на стационарном (140 мин.) и нестационарном (393 мин.) тестах. Значения параметров фильтра таковы: К = ||0,0796; 0,0795; 0,0765|| в стационарном случае и K = ||0,1415; 0,1415; 0,1322|| в нестационарном.
Ковариационные матрицы равны соответственно:

4.6.6. Другим эффективным алгоритмом сглаживания является алгоритм с запаздыванием, построенный на результатах [12]. Алгоритм основан на нахождении параметров {ak}, обеспечивающих минимум выражения
в классе последовательностей {Y},
удовлетворяющих условию (4.11).
Здесь δ - параметр запаздывания и, разумеется, Wδ < W'δ при δ > δ'.
Коэффициенты вычисляются по формулам:

где 
Ниже приведены значения ai при δ = 10 и типичном значении γ
= 46.
a0 = 0,051523; a1 = a-1 = 0,051411;
a2 = a-2 = 0,051076; a3 = a-3 = 0,050521;
a4 = a-4 = 0,049753; a5 = a-5 =
0,048776;
a6 = a-6
= 0,047601; a7 = a-7 = 0,046239;
a8 = a-8 = 0,044701; a9 = a-9 =
0,043002;
a10 = a-10 = 0,041157.
Алгоритм реализован на ЭВМ и предлагается в качестве альтернативного (или дополнительного) варианта реализации блока 14.
4.6.7. Сглаженная траектория интервальных отчетов дает оператору и контуру автоматического управления информацию об истинном, «свободном от флуктуации» уровне интенсивности.
Алгоритм прерывания устанавливает количественную меру существенности изменения и момент прерывания периода, в котором уровень интенсивности считается постоянным. Он основан на статистике Бреймана:
 (4.13)
(4.13)
где J(t) - определено в п. 4.6.2.;
σ2 - дисперсия одиночного отсчета. Согласно результатам Бреймана статистика B(t) распределена нормально с параметрами 0 и
1.
4.6.8. Алгоритмы прерывания
Шаг
0. Положить t = 0.
Шаг
1. Вычислить B(t).
Шаг
2. Если |B(t)| < α, то {t: = t + 1, перейти к шагу 0}.
Шаг
3. Найти ближайшее t0 < t, где |B(t)| ≤
1; перейти к шагу 0.
Точка t0 является точкой прерывания. Рекомендуемое значение α = 3,5. При этом вероятность ошибочного прерывания
(например, на интервале 100Δ) равна:
P{max |B(t)| > α} = 0,04.
0 ≤ t
≤ 100
4.6.9. Применение теста к анализу изменения интенсивности в период с 7.00 до 13.30 на одной из автомобильных дорог московского транспортного узла по реальным данным показало его высокую эффективность. По результатам теста выделены следующие
промежутки со статистически значимыми изменениями интенсивности:
Первый промежуток 7.00 - 8.14................. 1577 авт/ч;
Второй -"- 8.15 - 9.47................. 1880 -"-
Третий -"- 9.48 - 13.30............... 1978 авт/ч.
4.7. Оценивание фазовых переменных транспортного потока
4.7.1. Фазовые переменные транспортного потока не поддаются непосредственным измерениям в рамках технического обеспечения, используемого в системах управления движением. По этой причине в цепи обратной связи таких систем должен присутствовать преобразователь информации, осуществляющий оценивание фазовых переменных объекта управления по текущим значениям его непосредственно измеряемых параметров. В рамках прилагаемой технологии управления оцениванию подлежат средние плотности и скорости по пространственно-временной совокупности, соответствующей данной полосе движения в пределах определенного участка магистрали и временного такта. Задача оценивания решается изолированно для отдельного участка магистрали, при этом непосредственным измерениям подлежат интенсивности и средние за такт Δ скорости движения по каждой полосе начального и конечного сечения участка.
4.7.2. Помимо значений непосредственно измеряемых параметров транспортного потока используется информация, заключенная в моделях динамики транспортного потока и связей между фазовыми переменными и сигналами на выходе. Эти модели представляют собой систему стохастических разностных уравнений:

где X
- пополненный вектор фазовых переменных, его компонентами являются плотности и средние пространственные скорости ТП, а также априори неопределенные параметры модели;
W - вектор, составленный из интенсивностей и скоростей
на входе в участок и скоростей на выходе из участка;
Y - вектор, интенсивностей на выходе из участка;
α и β - гауссовские шумы с известными ковариационными матрицами
[2].
Уравнения (4.14) представляют собой стохастический аналог
уравнений
(4.1.), упрощенный путем использования известных текущих значений вектора W.
Уравнения (4.15)
вытекают из стандартного соотношения «скорость-плотность-интенсивность» - λ = ρV, которое для истинных (в отличие от средних значений) переменных транспортного потока является верным с точностью до
случайного слагаемого с известной дисперсией.
4.7.3. Задача оценивания вектора фазовых переменных решается на основе моделей (4.14) и (4.15) с помощью расширенного фильтра Калмана-Бьюси. Оценка для X(0) делается на основе гармонической средней скорости автомобилей, проходящих в конечном сечении участка за такт Δ и соотношения «скорость-плотность-интенсивность». Рис. 12 отражает результаты применения алгоритма к экспериментальным данным, описанным в прилож. 1.
4.7.4. Первоначально алгоритм был испытан на данных, имевшихся в зарубежной литературе [16]. Испытания подтвердили высокую эффективность этого алгоритма, одновременно выяснилось значение априорной информации, заключенной в численных значениях элементов, следующих ковариационных матриц:
R(α) - ковариации ошибки модели состояния;
R(β) - -"- -"- -"- наблюдения.
Рис. 12. Результаты оценивания плотности транспортного потока
на одной из полос шестиполосного участка магистрали
Наибольшее влияние на точность оценки оказывают отношения
верхних шести диагональных элементов матрицы R(α) и диагональных элементов матрицы R(β).
По материалам эксперимента, совмещавшего одновременную посекундную киносъемку участка и ручное фиксирование скоростей и числа проходящих автомобилей, удалось получить ряд конкретных
оценок.
Так была получена последовательность рекуррентных
оценок ковариационной матрицы ошибок корректированных
оценок,
которую можно использовать далее в качестве приближения
для R(α). Основной интерес представляет значение верхней
левой подматрицы, где находятся дисперсии и ковариации скоростей и плотностей транспортного потока.
Подматрица P6 такова:
и была вычислена при
 .
.
Ниже приведены также рассчитанные по тому же материалу значения матричных элементов фильтра:
 .
.
В Гипродорнии имеется программа, реализующая описанный
алгоритм как в варианте, рассчитанном на исследовательские
цели, так и для работы с реальными данными.
4.8. Синтез корректирующих управлений
4.8.1. Основанием для смены управляющих программ является значительное изменение спроса или условий движения. Однако, в рамках примерно постоянных значений этих внешних переменных происходят отклонения истинной траектории объекта управления X(t) от расчетной X0(t) для данной программы управления, связанные со стохастической природой транспортного потока. Задача синтеза корректирующих управлений заключается в нахождении алгоритма, осуществляющего соответствие δX(t)→δU(t), между отклонениями от расчетной траектории и корректирующим управлением, оптимальным в смысле заданного критерия.
4.8.2. Для использования в системе АРДАМ предлагается один из возможных подходов к решению этой задачи, связанный со сведением ее к известному классу задач синтеза - линейному
оптимальному управлению с квадратичным критерием. Так как потактные переключения управлений имеют физический смысл только для назначений допустимых потоков на въездах URi, то в рамках каждой конкретной задачи синтеза UVij и UViαβ предполагаются фиксированными. Необходимая в этом случае модель представляет собой линеаризацию модели (4.1) в окрестности стационарной устойчивой траектории. Ее следует трактовать как модель распространения флуктуации в многорядном транспортном потоке при наличии управлении.
4.8.3. Мерой отклонения объекта управления от расчетной траектории считается математическое ожидание суммы квадратичных форм от δX и δU. Решение задачи задается линейным оператором L(t), не зависящим от статистических характеристик помехи и вычисляемым стандартным образом.
На рис.
13 показаны траектории одной из фазовых переменных
для ситуации непродолжительного (3 мин)
резкого торможения потока. Управление δU обеспечивает здесь более умеренную «воронку» скоростей за счет своевременной задержки транспорта на
въездах.
Рис. 13. Сглаживание «воронки скоростей»
4.8.4. Сформированной здесь моделью завершается построение модельной основы предлагаемого варианта технологии управления транспортными потоками на автомобильной магистрали. Она включает в себя двухуровневую стратегию управления и цепь обратной связи, состоящую из блока оценивания и блока коррекции. Существенные колебания спроса, зарегистрированные в блоке фильтрации (блок 4), наряду с внешними факторами (блок 6), которые могут изменять значения динамических параметров модели, дают основания для очередной смены управляющих программ. Программы рассчитаны вне реального масштаба времени. С каждой из них связана
определенная номинальная траектория и, как правило, постоянный оператор обратной связи L. Рассогласования между номинальной и фактической траекторией определяют в силу величину корректирующего управления.
4.9. Оценка пропускной способности в реальном масштабе времени
4.9.1. Пропускная способность различных участков автомобильной магистрали является важнейшей характеристикой этого
инженерного сооружения как аппарата обслуживания. Факторы, влияющие на этот показатель, описаны в специальной литературе [5, 11]. Оперативная оценка пропускной способности имеет определяющее значение для работы блока управления функционированием дороги (блок 11).
4.9.2. Для определения пропускной способности контрольного сечения автомобильной магистрали (сечения, оборудованного детекторами скорости) канд. техн. наук М.Я. Блинкиным была предложена процедура, дающая оценку этого показателя в реальном масштабе времени и использующая только текущую информацию о параметрах транспортного потока. Известные методы [9] предполагают либо наличие априорной информации, либо организации специальных режимов движения (например, искусственного затора). По этой причине их применение в системах управления движением нецелесообразно.
4.9.3. Процедура определения пропускной способности по максимуму функции регрессии (МФР) реализуется с помощью комплекса, состоящего из нескольких (по числу полос движения) детекторов скорости и работающего синхронно с ними предиктора - вычислительной системы, реализованной аппаратурно или программно.
4.9.4. Процедура МФР основана на совместном измерении интервальных, например минутных, объемов движения и скоростей проходящих автомобилей, рекуррентного уточнения по полученным данным регрессионной зависимости между плотностью и интенсивностью транспортного потока в диапазоне полученных данных и определении пропускной способности как максимума функции регрессии методом стохастической аппроксимации.
Для простоты изложения в описанной ниже процедуре МФР
предполагается наличие трех детекторов, использование линейной по параметрам функции регрессии и простейшего варианта алгоритма Качмажа [10] для рекуррентной оценки ее параметров.
4.9.5. Процедура МФР.
Шаг
1. Ввод уставок Δ, Т, а0, b0, u0.
(Здесь Δ - временный такт, по которому осредняются параметры его порядок 1/100
¸ 1/30 ч;
T
- число тактов в процедуре; TΔ - полное время процедуры; a0 - вектор, В0 - матрица, дающие начальное приближение для линейных регрессионных зависимостей:

где i = 1, 2, 3 - индекс полосы;
t - индекс временного такта;
u0 - начальное приближение для плотности, соответствует пропускной способности.
λit и ρit - интенсивность движения и средняя плотность
за такт t).
Шаг
2. t : = 0. (Включение счетчика дискретного времени, t)
Шаг
3. τ : = 0.
(τ ≤ Δ, включение счетчика непрерывного времени внутри такта).
Шаг 4D1 K1 : = 0; S1 : = 0;
Шаг 4D2 K2 : = 0; S2
: = 0;
Шаг
4D3 К3 : = 0; S3 : = 0.
(Шаги с индексом Di относятся к функционированию детектора i,
с индексом P - к функционированию предиктора; Ki - переменная числа прошедших автомобилей по полосе i;
Si - переменная суммы обратных значений скоростей).
Шаг 5. Если τ > Δ, то {τ : =
0; переслать Ki и Si в память предиктора; перейти к шагу 4}.
Шаг 6D1. В случае срабатывания детектора скорости на полосе 1 {K1 = K1 + 1; S1 : = S1 + v-11,k; перейти к шагу 5}.
Шаг
6D2. Аналогично для полосы 2.
Шаг 6D3. Аналогично для полосы 3.
(Здесь vi,k -
скорость k-того по счету автомобиля, прошедшего по
полосе i в данном такте.)
Шаг
6Р. Если очередные значения Si и ki поступили, то
{для i = 1, 2, 3; λti : = ki/Δ; vit = ki/Si; (4.16)
 (4.17)
(4.17)
Здесь используются следующие обозначения:
вектор Wit = {ρit, ρitρ1t, ρitρ2t, ρitρ3t};
-"- Cit
= {ait, bi1t, bi2t;
bi3t};
-"- ej - единичный орт оси j в пространстве {W};
скаляр Pt - текущая оценка пропускной способности;
αt, βt - числовые последовательности из метода стохастической аппроксимации, удовлетворяющие условиям

Формула (4.16) - рекуррентное соотношение из алгоритма Качмажа [10], формула (4.17) - рекуррентное соотношение из алгоритма
стохастической аппроксимации Роббинса-Монро [8], предназначенного для отыскания максимума функции регрессии.
Шаг 7. Если t < Т, то
{t : = t + 1; перейти к шагу 3}
Шаг
8. Конец.
4.9.6. В рамках алгоритма управления системы АРДАМ процедуру МФР следует регулярно применять в различных характерных
дорожных условиях. Применение процедуры МФР вне систем управления движением станет возможным после ее аппаратурной реализации в рамках предлагаемого комплекса «детектор скорости - предиктор пропускной способности». В этом случае процедура может быть повсеместно использована в практике «с целью оценки возможности пропуска колонн автомобилей, получения дополнительных коэффициентов снижения пропускной способности, а также оценки эффективности мероприятий по повышению пропускной способности» [9].
5. ВЫВОДЫ
Стратегия управления в системе АРДАМ взаимообусловлена со схемой организации движения на участке МКАД-Истра и номенклатурой предполагаемых технических средств, системное использование которых она призвана обеспечивать. Алгоритм управления движением в системе АРДАМ, реализующий стратегические концепции состоит из двух контуров, обусловленных необходимостью управления движением, как в автоматическом режиме, так и вручную.
Контур автоматического управления включает в себя двухуровневую стратегию (в узком смысле) управления и цепь обратной связи, состоящую из блока оценивания и блока коррекции. Существенные колебания спроса, зарегистрированные в блоке фильтрации (наряду с внешними факторами), дают основания для очередной смены управляющих программ. Программы рассчитаны вне
реального масштаба времени, в каждой из них связана определенная
номинальная траектория и оператор обратной связи. Рассогласования между номинальной и фактической траекториями определяют величину корректирующего управления.
Контур ручного управления ограничен кругом задач, направленных на оперативное изменение управляющих воздействий. Необходимость их решения возникает в случаях, когда оператор с помощью имеющихся у него средств наблюдения и связи первым получает информацию о существенных изменениях в нарушении нормального функционирования аппарата (автомобильная магистраль) или процесса обслуживания (движение транспортного потока). Другими поводами для включения контура ручного управления является необходимость создания особых режимов движения, связанных с обеспечением приоритетного пропуска определенных автомобилей или
проведением на дороге работ, требующих введения соответствующих ограничений. При этом контур автоматического управления
осуществляет автоматическую подстройку всей совокупности управляющих воздействий под изменения, вносимые оператором. В этом случае в оптимизационной подсистеме решается та же задача оптимального управления, а управляющие воздействия, назначенные оператором, рассматриваются как дополнительные ограничения на пространство управлений.
Основные алгоритмы оптимизационной и информационной подсистемы контура автоматического управления следует базировать
на разработанных канд. техн. наук М.Я. Блинкиным макроскопических
моделях транспортного потока, позволяющих учесть возможность
координированного применения комплекса технических средств. Данный класс моделей предложен на основе принципов физической методологии в теории оптимальных систем и экспериментальных фактов,
характеризующих многорядный однонаправленный плотный транспортный поток на автомобильной магистрали как объект управления.
Совокупность предложенных моделей проверена на адекватность и калибрована по результатам натурных экспериментов. В ходе последних были получены данные о скорости, интенсивности и плотности движения транспортных потоков по полосам, отклика транспортного потока на управляющие воздействия, а также данные о величинах приемлемых интервалов на въезде на магистраль. Ряд их получен для автомагистралей нашей страны впервые.
Ограничения на рекомендуемые скорости движения, определяющие область допустимых управлений, следует рассчитывать по методике канд. техн. наук А.П. Васильева, позволяющей связать допустимые скорости движения с полной совокупностью дорожных и метеорологических факторов.
Задача расчета управляющих программ для системы АРДАМ в рамках данной стратегии и разработанных моделей относится к классу задач дискретного оптимального управления, а коррекции - к классу задач
дискретного линейного оптимального управления.
Основной информацией для смены управляющих программ служат
данные об изменении уровня спроса на пользование участками магистрали. В связи с этим разработаны алгоритмы фильтрации интервальных объемов движения, параметры которого рассчитаны по реальным данным. Алгоритм обладает преимуществом перед стандартными процедурами сглаживания за счет использования априорной
информации,
специфичной для транспортного потока.
Для решения задачи оценивания фазовых переменных транспортного потока в реальном масштабе времени предложена стохастическая макроскопическая модель. Алгоритм фильтрации, основанный на предлагаемой модели и настроенный на параметры, вычисленные по реальным данным, дает,
в частности, возможность получать оценки плотностей транспортного потока раздельно по полосам движения
- параметров, недоступных для непосредственного измерения техническими средствами.
Результаты настоящей работы были использованы при разработке объектно-ориентированного математического обеспечения системы АРДАМ и нашли применение в дальнейшем при разработке АСУД на автомобильных магистралях; для анализа проектных решений и схем организации движения на проектируемых автомобильных магистралях; расчета допустимых скоростей движения при использовании знаков со сменной информацией; при экспертизе по вопросу целесообразности приобретения зарубежных АСУД; для подготовки специалистов по безопасности и управлению движением соответствующих учебных курсах.
Приложение
1
1.1. Исследование характеристик транспортного потока проводилось с целью получения данных о режимах движения транспорта на автомобильных магистралях, на основе которых были установлены диапазоны значений численных параметров различных блоков объемлющего алгоритма управления. Также требовалось получить данные по отклику транспортного потока на управляющие воздействия - предписания по скоростям движения. Для этих целей в качестве исходного материала были необходимы данные об интенсивности, скорости и плотности транспортного потока и в первую очередь для магистралей, имеющих различное число полос движения (от 4 до 8), отдельно для каждой полосы движения. Частично такие данные имеются в отечественной и зарубежной литературе, однако они являются не вполне удовлетворительными для этой области применения ввиду значительной разницы состава потока на дорогах нашей страны и за рубежом, а также ввиду того, что отечественные данные были получены преимущественно на городских магистралях [11, 15].
1.2. Методика проведения исследований заключалась в проведении на магистралях натурного эксперимента со съемкой транспортного потока на кинопленку. В качестве магистралей были выбраны Ярославское шоссе (обход г. Пушкино) и Горьковское шоссе (перед поворотом на Ногинск), имеющие четыре полосы движения, МКАД на участке с шестью полосами движения и Каширское шоссе за МКАД, имеющие восемь полос движения. Все магистрали имеют разделительные полосы.
Для проведения киносъемки был изготовлен комплекс аппаратуры, позволяющий вести покадровую съемку с интервалами 0,5; 1,0; 2,0; 4,0 и
8,0 сек. Съемка во всех случаях велась c путепроводов, что позволило охватить участок магистрали значительной протяженности. Для оценки плотности транспортного потока
регистрация его параметров осуществлялась синхронно в двух
створах,
отстоящих друг от друга на 500 м.
В этих случаях в одном из створов использовался ручной метод получения данных (с помощью скоростеметров).
1.3. Методика проведения эксперимента по изучению отклика транспортного потока на управляющие воздействия заключалась в экспозиции над каждой полосой движения дорожных знаков, ограничивающих скорость движения, и проведении автоматической покадровой киносъемки через 1 с участка дороги, находящегося за знаком. Съемка производилась непосредственно в месте установки знаков и за 200, 500 и 1200 м за ними.
Знаки, ограничивающие скорость движения, устанавливались над полосами движения в следующей последовательности: 40 и 40 км/ч, 40 и 60 км/ч, 60 и 60 км/ч, 60 и 80 км/ч, 600 и 100 км/ч (рис. 1, прилож. 1).
Экспозиция каждой пары знаков менялась после прохода под
ними 500 - 600 автомобилей. Знаки имели III-й типоразмер и были
изготовлены в соответствии с ГОСТ 13508-74. Съемка велась на 16 мм кинопленку с электромеханическим спусковым устройством, позволяющим менять время между съемкой последовательных кадров
в пределах от 0,25 до 3 с.
1.4. Обработка данных съемки проводилась путем проектирования кадров на масштабный экран и измерения перемещений автомобилей за время между двумя соседними кадрами. Полученные таким образом данные затем обрабатывались на ЭВМ для определения необходимых статистических характеристик.
1.5. В результате обработки данных были получены:
1. Средние значения скоростей движения автомобилей (без разделения по составу), дисперсия скоростей и распределение их величин для каждой полосы движения (табл. 1, прилож. 1).
2. То же, для легковых автомобилей (табл. 2, прилож. 1)
3. То же, для грузовых автомобилей (табл. 3, прилож. 1).
4. Интенсивность движения за каждую минуту по полосам и типам автомобилей совместно со средними скоростями движения за эти же интервалы.
5. Уровни факторов и дисперсионный анализ массива скоростей в трехфакторной схеме (фактор знака, полосы движения и типа транспортного средства) отражены в табл. 4, прилож. 1.
6. Зависимость уровней загрузки отдельных полос при различной интенсивности движения по магистрали (см. рис. 1, прилож. 1).
Рис. 1. Загрузка полос движения на автомагистрали:
а - четырехполосной; б - шестиполосной;
в - восьмиполосной (1, 2, 3, 4 - полосы движения)
Рис. 2. Распределение величин приемлемых интервалов при въезде автомобилей на магистраль:
1 - сходу;
2 - после остановки
7. Распределение величин приемлемых интервалов автомобилей на въезде на магистраль (рис. 2 прилож. 1).
1.6. Полученная в результате обработки данных информация позволила выполнить ряд операций по обработке отдельных блоков алгоритма управления в системе АРДАМ на реальных данных:
произвести оптимизацию работы программных управлений в
заторовых ситуациях;
определить параметры фильтров случайного процесса изменения интенсивности движения и фазовых переменных транспортного
потока;
исследовать работу съездов на магистраль, работающих в режиме поиска разрыв в потоке.
Результаты обработки приведены выше при описании блоков 4, 12, 13, 14.
1.7. Влияние каждого из рассматриваемых факторов можно увидеть на более подробном анализе материалов массива, полученного непосредственно за знаком.
Значение  , уровни факторов таковы:
, уровни факторов таковы:
фактор состава -
легковые T1 + 3,508
грузовые T2 = -3,508,
фактор полосы -
1 L1 = -4,558,
2 L2 = +4,558,
фактор знака, км/ч -
40 E1 = -3,259,
60 E2 = 0,088,
80 E3 = 3,892,
100 E4 = 1,842
отсутствие знака: E0 = 1,785.
Значение уровней факторов T и L являются вполне логичными и соответствуют средней разности между скоростями легковых и грузовых автомобилей 7,016 км/ч,
между полосами движения - 9,116 км/ч.
Уровни факторов знака находятся в логическом соответствии с содержанием соответствующих знаков, но их количественные значения находятся весьма далеко от разностей
между указанными на знаках скоростях.
1.8. Анализ распределения скоростей движения в месте установки дорожного знака, ограничивающего скорость движения, показывает, что попытки резкого ограничения скорости без дополнительной информации, поясняющей причину такого ограничения, не приводят к желаемому результату. Кроме того, это вызывает значительное расширение диапазона скоростей движения транспортных средств, так как лишь небольшая часть водителей начинает двигаться с установленной скоростью, что приводит к появлению в потоке большого числа обгоняющих автомобилей и увеличению шума ускорения. Тем самым значительно ухудшаются условия безопасности движения.
Анализ изменения величин средних скоростей движения по длине дороги за местом установки знака приведен на рис. 3 прилож. 1, где показано изменение скоростей движения после установки знаков по отношению к скорости движения на этом же участке до установки знаков. Из этого рисунка видно, что изменение скорости движения транспорта на первой и второй полосе различно. На первой полосе, где транспортные средства на подходе к знаку
имеют невысокие скорости движения (порядка 60 км/ч),
наличие знаков ограничения скорости движения до 40 и 60 км/ч одинаково вызывало снижение до уровня 0,9 от первоначального значения. Максимальное снижение скорости наблюдалось на участке от 200 до
600 м за знаком. Далее скорость движения восстанавливалась до первоначального значения.
На второй полосе, где средняя скорость движения транспорта
до установки знаков была довольно высока (более 60 км/ч), знаки ограничения скорости вызывали более резкое (до уровня 0,75) изменение скорости в месте установки знака. Увидев, что это ограничение не имеет каких-либо оснований, они восстанавливают
свою первоначальную скорость движения и, чтобы компенсировать
потерю времени, начинают двигаться с повышенной скоростью. Причем водители грузовых автомобилей, имеющие, как правило, больший опыт работы, после снижения скорости движения под знаком сразу начинают ее увеличивать и на расстоянии 600 м полностью восстанавливают ее до первоначального значения. Водители легковых автомобилей, в числе которых большой процент любителей, после снижения скорости под знаком движутся с пониженной скоростью около 400 м,
а затем на расстоянии 1000 м восстанавливают ее первоначальное значение.
Рис. 3. Изменение величин средних скоростей движения
за местом установки знаков:
а - на первой полосе; б - на второй полосе; 1 - легковые; 2 - грузовые автомобили
Таблица 1
Средние значения скоростей движения автомобилей (без разделения по составу), дисперсия скоростей и распределение их величин для каждой полосы на шестиполосной магистрали
|
Распределение, до
|
Средние по полосам
|
|
52,837
|
68,798
|
82,038
|
|
Среднеквадратичные по полосам
|
|
8,270
|
8,564
|
10,760
|
|
10
|
0,0000
|
0,0000
|
0,0000
|
|
15
|
0,0007
|
0,0000
|
0,0000
|
|
20
|
0,0034
|
0,0000
|
0,0000
|
|
25
|
0,034
|
0,0000
|
0,0000
|
|
30
|
0,0144
|
0,0000
|
0,0000
|
|
35
|
0,0239
|
0,0000
|
0,0000
|
|
40
|
0,0574
|
0,0000
|
0,0000
|
|
45
|
0,1811
|
0,0014
|
0,0000
|
|
50
|
0,4395
|
0,0124
|
0,0000
|
|
55
|
0,7068
|
0,0606
|
0,0000
|
|
60
|
0,8722
|
0,2218
|
0,0189
|
|
65
|
0,9501
|
0,4477
|
0,0566
|
|
70
|
0,9815
|
0,6543
|
0,1604
|
|
75
|
0,9911
|
0,8416
|
0,3491
|
|
80
|
0,9973
|
0,9270
|
0,5660
|
|
85
|
0,9993
|
0,9793
|
0,6981
|
|
90
|
1,0000
|
0,9972
|
0,7830
|
|
95
|
1,0000
|
1,0000
|
0,9151
|
|
100
|
1,0000
|
1,0000
|
0,9528
|
|
105
|
1,0000
|
1,0000
|
0,9811
|
|
110
|
1,0000
|
1,0000
|
1,0000
|
Таблица 2
Средние значения скоростей движения легковых автомобилей, дисперсия скоростей и распределение их величин для каждой
полосы шестиполосной магистрали
|
Распределение, до
|
Средние по полосам
|
|
57,304
|
69,967
|
82,633
|
|
Среднеквадратичные по полосам
|
|
9,771
|
8,531
|
10,907
|
|
1
|
2
|
3
|
4
|
|
25
|
0,0000
|
0,0000
|
0,0000
|
|
30
|
0,0044
|
0,0000
|
0,0000
|
|
35
|
0,0176
|
0,0000
|
0,0000
|
|
40
|
0,0529
|
0,0000
|
0,0000
|
|
45
|
0,1366
|
0,0000
|
0,0000
|
|
50
|
0,2906
|
0,0073
|
0,0000
|
|
55
|
0,4626
|
0,0388
|
0,0000
|
|
60
|
0,6960
|
0,1977
|
0,0204
|
|
65
|
0,8458
|
0,3857
|
0,0612
|
|
70
|
0,9339
|
0,5891
|
0,1429
|
|
75
|
0,9692
|
0,8176
|
0,3265
|
|
80
|
0,9868
|
0,9050
|
0,5306
|
|
85
|
0,9956
|
0,9748
|
0,6735
|
|
90
|
1,0000
|
0,9981
|
0,7653
|
|
95
|
1,0000
|
1,0000
|
0,9082
|
|
100
|
1,0000
|
1,0000
|
1,9490
|
|
105
|
1,0000
|
1,0000
|
0,9796
|
|
110
|
1,0000
|
1,0000
|
1,0000
|
Таблица 3
Средние значения скорости движения грузовых автомобилей, дисперсия скорости и распределение их величин для каждой полосы шестиполосной магистрали
|
Распределение, до
|
Средние по полосам
|
|
52,017
|
65,924
|
74,750
|
|
Среднеквадратичные по полосам
|
|
7,606
|
7,942
|
4,380
|
|
1
|
2
|
3
|
4
|
|
10
|
0,0000
|
0,0000
|
0,0000
|
|
15
|
0,0008
|
0,0000
|
0,0000
|
|
20
|
0,0040
|
0,0000
|
0,0000
|
|
25
|
0,0040
|
0,0000
|
0,0000
|
|
30
|
0,0162
|
0,0000
|
0,0000
|
|
35
|
0,025
|
0,0000
|
0,000
|
|
40
|
0,0583
|
0,0000
|
0,0000
|
|
45
|
0,1893
|
0,0048
|
0,0000
|
|
50
|
0,4668
|
0,0238
|
0,0000
|
|
55
|
0,7516
|
0,1143
|
0,0000
|
|
60
|
0,9045
|
0,2810
|
0,0000
|
|
65
|
0,9693
|
0,6000
|
0,0000
|
|
70
|
0,9903
|
0,8143
|
0,3750
|
|
75
|
0,9951
|
0,9000
|
0,6250
|
|
80
|
0,9992
|
0,9810
|
1,0000
|
|
85
|
1,0000
|
0,9905
|
1,0000
|
|
90
|
1,0000
|
0,9952
|
1,0000
|
|
95
|
1,0000
|
1,0000
|
1,0000
|
Таблица 4
Результаты дисперсионного анализа
|
Источник
дисперсии
|
Сумма квадратов
|
Число степеней свободы
|
Средний квадрат
|
F
|
F табл. α = 0,005
|
|
Экспозиция
знаков
|
SE = 124,66
|
4
|
σE2
= 31,165
|
FE = 10,7
|
3,715
|
|
Полоса
движения
|
SL = 476,57
|
1
|
σL2 = 476,57
|
FL =
164,3
|
7,88
|
|
Вид
транспорта
|
ST
= 309,68
|
1
|
σT2
= 309,68
|
FT
= 106,3
|
7,88
|
|
Внутри
групп
|
Sξ = 2452,5
|
842
|
σξ2
= 2,978
|
Гипотеза
о
равенстве средних
отвергается по
всем
факторам
на 0,5
% уровне
значимости
|
|
Полная
сумма квадратов
|
SS = 3965,41
|
848
|
σ2 = 4,676
|
|
|
2.1. Полученные в результате натурного эксперимента данные о величинах интервалов, принимаемых водителями при входе автомобиля в поток на магистрали, а также данные о распределении транспортных средств по полосам, позволили исследовать работу въездов на всех запроектированных пересечениях участка магистрали от МКАД до г. Истра, при регулировании движения на них по алгоритму поиска разрывов в транспортном потоке (рис. 4, прилож. 2).
Рис. 4. Работа автоматической системы, регулирующей въезд на магистраль по алгоритму поиска разрыва в потоке:
а - обнаруживание приемлемого интервала; б - перенос приемлемого интервала; в - вхождение в основной поток; 1 - приемлемый интервал; 2 - детектор; 3 - светофор на въезде
Методика исследований включает два этапа. Первый из них
заключался в применении метода статистического моделирования
на ЭВМ, который позволял получить пропускную
способность въезда, а также ожидаемые задержки транспорта на въезде при
любой транспортной нагрузке [1].
2.2. Модель построена таким образом, что автомобили, движущиеся по магистрали, проходят в зоне въезда без задержек. Автомобили,
желающие влиться в поток транспорта на магистрали, входят в него по мере появления на первой полосе магистрали таких интервалов, в которые автомобили на въезде успевают безопасно присоединиться к потоку. Если автомобиль, желающий попасть на магистраль, подходит к въезду в тот момент, когда на магистрали имеется приемлемый интервал, то на светофоре на въезде загорается зеленый сигнал и он входит на магистраль без задержек.
В противном случае загорается красный сигнал и автомобиль
останавливается,
начиная ждать приемлемый интервал. С появлением последнего опять загорается зеленый сигнал и автомобиль на въезде трогается, но в этом случае ему назначается задержка. Все события, происходящие в модели (прибытие автомобилей, их задержка, отправление и т.п.), фиксируются во времени и производится подсчет задержек, очередей и количества автомобилей, успевших пройти пересечение во время моделирования.
Принято, что распределение интервалов прибытия следует смещенному экспоненциальному закону.
Кроме того, в модели приняты следующие допущения:
1. Различаются два типа приемлемых интервалов Δt и
Δt0 в зависимости от того, происходит ли вливание в основной поток автомобиля, желающего попасть на магистраль сходу или после остановки у стоп-линий. Кроме того, величина этих интервалов зависит от интенсивности движения по первой полосе магистрали, что учитывается специальным коэффициентом.
2. Если автомобиль останавливается и стоит в очереди первым, ему после отправления назначается задержка на ускорение и трогание.
3. Когда автомобиль выезжает на магистраль после остановки со второго места в очереди, ему назначается меньшая задержка ускорения и задержки подхода к стоп-линии.
4. Если автомобиль выезжает на магистраль с третьего места в очереди и далее, то задержка на ускорение и подход к стоп-линии имеет еще меньшее значение.
5. Автомобили въезжают на магистраль один за другим, не обгоняя друг друга.
Статистическая модель реализована Алгол-программой, составленной по разработке канд. техн. наук В.Д. Белова [1]. В результате проведенного моделирования были получены зависимость возможного потока на въезде от интенсивности движения
по первой полосе магистрали (рис.
5, прилож. 2), а также ожидаемые величины задержек транспорта и очередей на въезд в зависимости от интенсивности движения на первой полосе магистрали и
въезде
(см. табл. 4, прилож. 1).
2.3. Второй этап исследований основан на аналитическом моделировании, с использованием результатов Дрю [7] и Феррари [19] и вычислениях на ЭВМ. Выходной характеристикой въезда (при данном расположении на магистрали и геометрических параметрах) является так называемый критический интервал (T), который определяется как медиана случайной величины ξ:
ξ = ατ0 + (1 - α)t1,
где τ0 - максимальный из отвергнутых, а τ1 - приемлемый для данного экипажа интервал, 0 ≤ α ≤ 1. По данным американских авторов эта величина находится в пределах 2,7 - 4,7 с [13], отечественные данные представлены на рис. 2 прилож. 1.
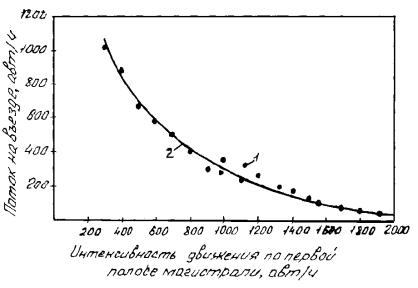
Рис. 5. Зависимость возможного потока на въезде от интенсивности движения на первой полосе:
1 - данные статистического моделирования;
2 - данные аналитического моделирования
Здесь предполагается, что поток прибытий (интервал И) на въезд является пуассоновским (с параметром λ). Справедливость приводимых здесь результатов в незначительной степени
зависит от этого допущения, в то время как его принятие значительно упрощает итоговые формулы.
Работу «аппарата обслуживания» характеризует распределение случайной величины X
- времени ожидания головного автомобиля очереди. Суммарное время ожидания V представляет собой
сумму
V = X + W,
где W
- время нахождения автомобиля в очереди. Математическое ожидание V равно:
Величина 3600/Ex равна пропускной способности въезда.
Величины Ex и Dx,
через которые выражаются время ожидания, длина очереди, пропускная способность, зависят в свою очередь от распределения интервалов на полосе движения.
Здесь удовлетворительным (это проверялось на экспериментальном материале) и аналитически удобным является предположение о том, что интервалы на полосе движения подчинены
распределению Эрланга:
где Q - интенсивность движения; k
- параметр регулярности. Случай k = 1 соответствует пуассоновскому распределению, при k→∞ функции fk(t) сходятся к δ - распределению Дирака. При k ≥ 6 функции fk(t) вполне удовлетворительно аппроксимируются нормальным распределением. Первые два статистических момента случайной величины равны соответственно:
Et = 1/Q (1)
Dt = (Et)2/k, (2)
Известно, что k возрастает с ростом Q.
Следуя Феррари, принимаем, что k = 1 при Q
≤ 1/6 авт/с (60 авт/ч),
а при больших интенсивностях растет ступенчато
k = entier(9Q - 0,5), (3)
здесь entier(Z) - целая часть Z.
Значения Ex и Dx вычислены в работе
[14], эти формулы таковы:
 (4)
(4)
 (5)
(5)
С учетом формулы 4 прилож. 2, имеем выражение для пропускной способности въезда:
CAP(Q)
= 3600/Ex.
В макроскопической модели 4.3 для CAP(Q) используются полиноминальные аппроксимации. Численные результаты получены счетом по специально разработанной программе на ЭВМ
М-222.
Полиноминальные аппроксимации при различных T имеют общий вид:
САР(Q) = a0
+ a1Q + a2Q2 + a3Q3 (7)
и сведены в табл. 5.
Таблица 5
Коэффициенты аппроксимирующих полиномов
|
T
|
Степень
|
Коэффициент
детерминации
|
a0
|
a1
|
a2
|
a3
|
|
3
|
1
|
0,998
|
1724,88
|
-0,7697
|
0
|
0
|
|
4
|
2
|
0,998
|
1691,21
|
-1,3176
|
0,23706
· 10-3
|
0
|
|
5
|
2
|
0,997
|
1577,07
|
-1,6041
|
0,41101 · 10-3
|
0
|
|
6
|
2
|
0,995
|
1410,05
|
-1,6512
|
0,48512 · 10-3
|
0
|
|
7
|
2
|
0,99
|
1230,53
|
-1,5676
|
0,49459
· 10-3
|
0
-6
|
|
8
|
3
|
0,994
|
1226,72
|
-2,1487
|
0,127415 · 10-2
|
-0,25516 · 10-6
|
|
9
|
3
|
0,992
|
1091,89
|
-2,0785
|
0,133014 · 10-2
|
-0,285272 · 106
|
|
10
|
3
|
0,99
|
971,13
|
-1,957
|
0,131984 · 10-2
|
-0,295741 · 10-6
|
Наличие конкретных данных для формулы (7) прилож. 2 позволяет предложить способ регулирования потока на въезде, основанный не на непосредственном ограничении на впуск, а на выборе такого T, для которого ограничение выполняется автоматически. Такой способ обеспечил более равномерный впуск в течение
шага регулирования.
2.4. Полученные данные используются в процедуре макроскопического моделирования, но имеют также и самостоятельный интерес, например, в задачах проектирования въездов на автомобильную магистраль.
1. Белов В.Д. Исследование работы транспортных нерегулируемых пересечений в одном уровне методом моделирования. Изд-во «Моспроект-1», М., 1968, 75 с.
2. Блинкин М.Я. Оценка фазовых переменных в системе АРДАМ. Труды Гипродорнии, вып. 15, 1975, 73 - 78 с.
3. Блинкин М.Я. Вопросы расчета и смены управляющих программ в системе АРДАМ. Труды Гипродорнии, вып. 16. М., 1976, 148 - 161 с.
4. Блинкин М.Я. Задача оптимального управления транспортным потоком на автомобильной магистрали. Автоматика и телемеханика, 1976, № 5.
5. Васильев А.П. Состояние дорог и безопасность движения автомобилей в сложных погодных условиях. М., «Транспорт», 1976.
6. Васильев А.П., Фримштейн М.И. Управление движением на автомобильных дорогах. М., «Транспорт», в печати.
7. Дрю Д. Теория транспортных потоков и управление ими. М., «Транспорт», 1973, 424 с.
8. Ермольев Ю.М. Методы стохастического программирования. М., «Наука», 1976, 240 с.
9. Методические рекомендации по оценке пропускной способности автомобильных дорог. Минавтодор РСФСР. М., «Транспорт», 1976.
10. Райбман Н.С., Чадеев В.М. Адаптивные модели в системах управления. М., «Советское радио», 1966.
11. Сильянов В.В. Теория транспортных потоков в проектировании дорог и организации движения. М., «Транспорт», 1977, 303 с.
12. Эйкхофф П. Основы идентификации систем управления, М., «Мир», 1975.
13. Breiman L., Lawrence R.L. Time Scales, Fluctuation and Constant Flow Periods in Uni-directional Traffic. «Transportation Research», 1973, vol. 7, p. 77 - 105.
14. Ferrari P. Congestion Phenomena on Freeway Entrance. «11th Int. Stady Week Traffic Eng. and Safety.
Brussels, 1972, Proc.» London, 1973.
15. Kendall D. Some Problems of the Theory of Queues. «J. of the Royal Statistics Society», vol.
XIII, № 2, 1951.
16. Munjal P.K., Hsu Y.S. Characteristics of Freeway Traffic and Freeway Lanechanging Behavior.
«Highway Research Record», 1973, № 453.
17. Munjal P.K., Guan-Shic Hsu. Experimental Validation of Lanechanging Hypothesis of Aerial Data.
«Highway Research Record», 1973, №
456, p. 8 - 19.
СОДЕРЖАНИЕ