|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО |
||
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р ИСО |

Вибрация
МЕТОДЫ КАЛИБРОВКИ ДАТЧИКОВ ВИБРАЦИИ И УДАРА
Часть 11
Первичная вибрационная калибровка методами лазерной интерферометрии
ISO 16063-11:1999
Methods for the calibration
of vibration and shock transducers -
Part 11: Primary vibration
calibration by laser interferometry
(IDT)
|
|
Москва Стандартинформ 2010 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом
от 27 декабря
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием Всероссийский научно-исследовательский институт метрологической службы (ФГУП ВНИИМС) на основе собственного аутентичного перевода на русский язык стандарта, указанного в пункте 4, с участием Автономной некоммерческой организации «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 «Вибрация, удар и контроль технического состояния»
3
УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря
4 Настоящий стандарт является идентичным по отношению к международному стандарту ИСО 16063-11:1999 «Методы калибровки датчиков вибрации и удара. Часть 11. Первичная вибрационная калибровка методами лазерной интерферометрии» (ISO 16063-11:1999 «Methods for the calibration of vibration and shock transducers - Part 11: Primary vibration calibration by laser interferometry»)
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Содержание
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Вибрация МЕТОДЫ КАЛИБРОВКИ ДАТЧИКОВ ВИБРАЦИИ И УДАРА Часть 11 Первичная вибрационная калибровка методами лазерной интерферометрии Vibration. Methods for the calibration of vibration and shock transducers. Part 11. Primary vibration calibration by laser interferometry |
Дата введения 2011-01-01
1 Область применения
Настоящий стандарт устанавливает три метода первичной вибрационной калибровки преобразователей прямолинейного ускорения (далее - акселерометров) совместно с усилителями или без них для определения комплексного коэффициента преобразования посредством возбуждения гармонической вибрации и измерения амплитуды колебаний методами лазерной интерферометрии.
Установленные методы применяют в диапазоне частот от 1 Гц до 10 кГц и в диапазоне амплитуд ускорения от 0,1 до 1000 м/с2 (в зависимости от частоты).
Неопределенность измерений в соответствии с данными методами указана в разделе 2. Метод синус-аппроксимации (метод 3) позволяет проводить калибровку на частотах ниже 1 Гц (например, на частоте 0,4 Гц, используемой в качестве опорной частоты в некоторых стандартах) с амплитудами ускорения менее 0,1 м/с2 (например, 0,04 м/с2 на частоте 1 Гц) при наличии соответствующего низкочастотного вибростенда (см. раздел 9).
Метод счета полос (метод 1) применяют для определения модуля коэффициента преобразования в диапазоне частот от 1 до 800 Гц и, в особых случаях, на более высоких частотах (см. раздел 7). Метод точек минимума (метод 2) применяют для определения модуля коэффициента преобразования в диапазоне частот от 800 Гц до 10 кГц (см. раздел 8). Метод синус-аппроксимации может быть применен для определения модуля и фазового сдвига коэффициента преобразования в диапазоне частот от 1 Гц до 10 кГц.
Методы 1 и 3 обеспечивают калибровку при фиксированных значениях амплитуд ускорения на разных частотах. Метод 2 обеспечивает калибровку для фиксированных значений амплитуд перемещений (амплитуда ускорения изменяется в зависимости от частоты).
2 Неопределенность измерений
Применение методов, установленных настоящим стандартом, должно обеспечивать неопределенность измерений, не превышающую следующие значения:
a) для модуля коэффициента преобразования:
0,5 % измеряемого значения на опорных частотах и ускорениях (опорных точках);
не более 1 % измеряемого значения вне опорных точек;
b) для фазового сдвига коэффициента преобразования:
- 0,5° в опорных точках;
- не более 1° вне опорных точек. Рекомендуются следующие опорные точки:
- частота: 160, 80, 40, 16 или 8 Гц (или круговая частота: 1000, 500, 250, 100 или 50 рад/с);
- ускорение (амплитуда или среднеквадратическое значение): 100, 50, 20, 10, 2 или 1 м/с2.
Параметры усилителя выбирают так, чтобы минимизировать влияние шума, искажений и спада частотной характеристики на низких и высоких частотах на его функционирование.
Примечание - Неопределенность измерений представляют в виде расширенной неопределенности измерений в соответствии с [2].
3 Требования к испытательному оборудованию и средствам измерений
3.1 Общие положения
В настоящем разделе приведены требования к аппаратуре, позволяющей проводить калибровку в соответствии с областью применения данного стандарта и обеспечивающей выполнение требований к неопределенности измерений (раздел 2).
При необходимости может быть использовано испытательное оборудование, позволяющее реализовать требования к калибровке лишь в некотором ограниченном диапазоне частот и амплитуд. В этом случае, чтобы охватить диапазоны измерений полностью, используют разные виды испытательного оборудования.
Примечание - Аппаратура, указанная в настоящем разделе, включает в себя оборудование и средства измерений, применяемые для любого из трех методов калибровки настоящего стандарта, с указанием, в каком методе она применяется.
3.2 Генератор частоты с показывающим устройством
Следует использовать генератор частоты, имеющий следующие характеристики:
a) неопределенность измерений частоты не более 0,05 % показываемого значения;
b) отклонение частоты в процессе измерений не более ± 0,05 % показываемого значения;
c) отклонение амплитуды сигнала в процессе измерений не более ± 0,05 % показываемого значения.
3.3 Вибростенд с усилителем мощности
Следует использовать вибростенд с усилителем мощности, имеющий следующие характеристики:
a) коэффициент гармоник по ускорению не более 2 %;
b) малые поперечные и угловые колебания стола вибростенда, чтобы не оказывать существенного влияния на результаты калибровки. При больших амплитудах колебаний, преимущественно в низкочастотном диапазоне от 1 до 10 Гц, колебания в поперечном направлении должны быть не более 1 % колебаний в основном направлении; в диапазоне от 10 Гц до 1 кГц - не более 10 %; свыше 1 кГц - не более 20%;
c) собственный электронный шум испытательной установки должен быть не менее чем на 70 дБ ниже максимального значения выходного сигнала;
d) отклонение амплитуды ускорения в процессе калибровки не более ± 0,05 % показываемого значения.
Поверхность стола вибростенда, на которую устанавливают акселерометр, не должна деформировать его основание.
3.4 Сейсмический блок (блоки) вибростенда и лазерного интерферометра
Вибростенд и интерферометр устанавливают на общем или отдельных массивных блоках с целью предотвратить их относительное перемещение из-за колебаний грунта, а также для предотвращения чрезмерного влияния реакции опоры вибростенда на результаты калибровки.
При использовании общего блока его масса должна быть, по меньшей мере, в 2000 раз больше массы подвижной системы вибростенда. При выполнении данного условия реактивная вибрация акселерометра и интерферометра не будут превышать 0,05 %. Если масса сейсмического блока меньше, то колебания блока следует учитывать при расчете вибрации.
Для уменьшения искажений вследствие колебаний грунта при измерениях в диапазоне от 10 Гц до 10 кГц сейсмический блок (блоки) устанавливают на демпфированных пружинах, чтобы соответствующая составляющая неопределенности измерений не превышала 0,1 %.
3.5 Лазер
Для калибровки используют гелий-неоновый лазер.
В лабораторных условиях (при атмосферном давлении 100 кПа, температуре 23 °С и относительной влажности 50 %) номинальная длина волны лазера равна 0,63281 мкм.
Если лазер имеет ручную или автоматическую компенсацию влияния условий окружающей среды, то она должна быть установлена на нуль или отключена.
Допускается использовать одночастотный лазер с другой стабильной и известной длиной волны.
3.6 Интерферометр
Для приема интерференционного сигнала применяют интерферометр Майкельсона совместно с фотодетектором, имеющим частотную характеристику, перекрывающую необходимую ширину полосы частот.
Необходимая ширина полосы частот fmax, Гц, может быть вычислена по амплитуде измеряемой скорости vmax, м/с, по формуле
fmax = vmax·3,16·106
Для метода 1 (см. рисунок 1) и метода 2 (см. рисунок 2) используют простой интерферометр Майкельсона с одним фотодетектором. Для метода 3 (см. рисунок 3) используют модифицированный интерферометр Майкельсона с квадратурными выходными сигналами и с двумя фотодетекторами для приема сигнала интерферометра. Может быть использован интерферометр Майкельсона, модифицированный в соответствии с рисунком 4. Четвертьволновая пластина преобразует падающий линейно поляризованный свет в два измерительных луча со взаимно ортогональной поляризацией и фазовым сдвигом 90°. После интерференции с линейно поляризованным опорным лучом две компоненты со взаимно ортогональными поляризациями пространственно разделяют при помощи соответствующих оптических элементов (например, призмы Волластона или поляризационного светоделителя) и детектируют двумя фотодиодами.
Два выходных сигнала модифицированного интерферометра Майкельсона должны иметь сдвиг нуля не более ± 5 % амплитуды сигнала, относительную разность амплитуд менее ± 5 % и отклонение разности фаз от номинального угла 90° не более ± 5°. Чтобы удовлетворить этим требованиям, должны быть предусмотрены средства регулировки нуля, амплитуды сигнала и сдвига фаз между двумя сигналами интерферометра.
В случае больших амплитуд перемещений соблюдение указанных допусков может быть затруднено. Чтобы удовлетворить требованиям раздела 2 к неопределенности измерений, требования по допускам должны быть соблюдены, по крайней мере, для амплитуд перемещений до 2 мкм. Для больших амплитуд возможны большие допуски.
Пример - Для амплитуды перемещения
Примечание - Модифицированный интерферометр Майкельсона для методов 1, 2 или 3 может быть заменен другим подходящим двухлучевым интерферометром, например, модифицированным интерферометром Маха-Цандера.
3.7 Аппаратура для счета интерференционных полос (метод 1)
Для счета интерференционных полос должна быть использована аппаратура, имеющая следующие характеристики:
a) диапазон частот от 1 Гц до требуемой максимальной частоты (обычно 20 МГц);
b) максимальная неопределенность измерений 0,01 % показываемого значения.
Счетчик импульсов может быть заменен измерителем отношения частот при условии обеспечения требований к неопределенности измерений.
3.8 Перестраиваемый полосовой фильтр или спектроанализатор (метод 2)
Используемая аппаратура должна иметь следующие характеристики:
a) диапазон частот от 800 Гц до 10 кГц;
b) ширина полосы анализа не более 1/6 октавы (12 % среднегеометрической частоты);
c) спад частотной характеристики фильтра более 24 дБ на октаву;
d) отношение полезный сигнал/шум более 70 дБ (определяют по максимальному значению полезного сигнала);
e) динамический диапазон более 60 дБ.
3.9 Устройство детектирования нуля (метод 2)
Устройство детектирования нуля (не является необходимым при использовании спектроанализатора) должно иметь диапазон частот от 800 Гц до 10 кГц. Диапазон должен быть достаточен для детектирования выходного шума полосового фильтра.
3.10 Устройство измерения истинного среднеквадратического значения выходного сигнала акселерометра
Вольтметры, используемые для измерения истинного среднеквадратического значения выходного сигнала акселерометра, должны иметь следующие характеристики:
a) диапазон частот от 1 Гц до 10 кГц;
b) неопределенность измерений 0,1 % показываемого значения.
Для вычисления амплитуды сигнала среднеквадратическое значение умножают на ![]() .
.
Вольтметры среднеквадратического значения применяют в методах 1 и 2. В методе 3 для измерения напряжения следует использовать специальную аппаратуру (см. 3.13). Вольтметр среднеквадратического значения в данном случае может быть использован как вспомогательное средство.
3.11 Устройство измерения коэффициента гармоник
Для измерения искажений должно использоваться устройство, позволяющее определить коэффициент гармоник в диапазоне до 5 % и имеющее следующие характеристики:
a) диапазон частот от 1 Гц до 10 кГц с возможностью измерения до 5-й гармоники;
b) неопределенность измерений 10 % показываемого значения в диапазоне коэффициента гармоник от 0,5 % до 5 %.
3.12 Осциллограф
Применение осциллографа не является обязательным, но он может быть использован для лучшей настройки интерферометра и контроля формы сигнала акселерометра. Диапазон частот осциллографа - от 1 Гц до, как минимум, 2 МГц.
3.13 Записывающее устройство с компьютерным интерфейсом (метод 3)
Метод 3 требует применения записывающего устройства с компьютерным интерфейсом, позволяющего выполнять аналого-цифровое преобразование и хранить в памяти два квадратурных выходных сигнала интерферометра и выходной сигнал акселерометра. Разрешающая способность по амплитуде, частота выборки и объем памяти должны быть достаточными для калибровки в требуемом диапазоне амплитуд с неопределенностью измерений, указанной в разделе 2. Обычно для выходного сигнала акселерометра достаточно разрядности аналого-цифрового преобразования 10 бит, а для квадратурных сигналов на выходе интерферометра - 8 бит. Возможно использование двух регистрирующих устройств: двухканального для выходных сигналов интерферометра и устройства с более высокой разрешающей способностью и более низкой частоты выборки для выходного сигнала акселерометра. Оба регистрирующих устройства должны начинать и заканчивать запись сигналов одновременно. Допустимое расхождение в моментах начала записи следует оценить с учетом требований к неопределенности измерений (см. раздел 2).
Для наиболее короткого периода выходного сигнала интерферометра, который соответствует максимальной скорости вибрации, следует обеспечить достаточное число выборочных значений. При заданной амплитуде ускорения меньшей частоте соответствуют большие амплитуды перемещения, что требует большей частоты выборки и большего объема памяти. При невозможности обеспечить указанные требования амплитуду ускорения следует уменьшить.
Пример - Для калибровки акселерометра на частоте вибрации 1 Гц и при амплитуде ускорения 0,1 м/с2 требуются объем памяти более 4 Мбайт и частота выборки более 512 кГц
3.14 Компьютер с программой обработки данных (метод 3)
Компьютер с программой обработки данных используют при расчетах по 9.4.
3.15 Другие требования
Чтобы удовлетворить требованию к неопределенности измерений не превышать 0,5 %, рекомендуется акселерометр калибровать совместно с усилителем.
При расчете неопределенности измерений (см. приложение А) должны быть приняты во внимание чувствительность акселерометра к деформации основания, коэффициент поперечного преобразования и стабильность характеристик системы «акселерометр - усилитель».
При калибровке эталонного акселерометра, который впоследствии предполагают применять для
калибровки методом сравнения в положении «спина к спине», измерение коэффициента преобразования (как модуля, так и фазового сдвига) следует проводить с использованием имитатора, масса которого равна массе акселерометра, калибруемого методом сравнения. Обычно используют имитатор
массой
Если измеряют вибрацию верхней поверхности имитатора, то она должна быть отполирована, и
пятно лазерного луча должно находиться вблизи геометрического центра этой поверхности. В случаях, когда имитатор нельзя считать абсолютно твердым телом, следует учитывать относительное движение
верхней и нижней поверхностей имитатора. В качестве имитатора типичного акселерометра массой
Если используемый метод калибровки предполагает измерения вибрации верхней поверхности калибруемого акселерометра через продольные отверстия в имитаторе, то при этом могут иметь место акустические резонансы в отверстиях на соответствующих частотах, что увеличивает неопределенность измерений на этих частотах и в их окрестности. Влияние акустических резонансов должно быть учтено при расчете неопределенности измерений.
4 Условия окружающей среды
Калибровку проводят при следующих условиях окружающей среды:
a) комнатная температура (23 ± 3) °С;
b) относительная влажность не более 75 %.
Должны быть приняты меры к тому, чтобы на результат измерений не оказывали влияние фоновые шум и вибрация.
5 Предпочтительные значения опорных ускорений и частот
Предпочтительные значения опорных ускорений (амплитуд или среднеквадратических значений) и частот, соответствующие диапазонам измерений акселерометра, выбирают из следующих рядов:
a) ускорение (методы 1 и 3): 0,1; 0,2; 0,5; 1; 2; 5; 10; 50; 100; 200; 500; 1000 м/с2 (последнее значение - только для амплитуды);
b) частоты выбирают из стандартизованного ряда частот для третьоктавных полос (см. [1]) в диапазоне от 1 Гц до 10 кГц.
6 Требования, общие для всех методов
Для каждого сочетания опорных частот и ускорений гармонические искажения сигнала, поперечные и угловые колебания стола вибростенда, помехи и шумы измерительной аппаратуры должны быть в границах, позволяющих удовлетворить требованиям к неопределенности измерений.
Параметры используемого с акселерометром усилителя (коэффициент усиления и диапазон частот) должны быть установлены в соответствии с требованиями процедуры калибровки и указаны в протоколе испытаний.
7 Метод счета полос (метод 1)
7.1 Общие положения
Метод используют для определения модуля коэффициента преобразования в диапазоне частот от 1 до 800 Гц.
Примечание - Метод 1 можно применять для калибровки в диапазоне частот выше установленного, если погрешность квантования устраняют специальными средствами (см. [2], [4]). Это позволяет проводить калибровку при заданной амплитуде ускорения (например, 100 м/с2) на более высоких частотах.
7.2 Испытания
После настройки интерферометра (см. 3.6) определяют коэффициент преобразования при заданных амплитудах ускорения и частотах вибрации (см. раздел 5) путем измерения частоты полос при помощи счетчика полос или отношения частоты вибрации к частоте полос при помощи измерения отношения частот (см. 3.7). Измерительная система для метода 1 показана на рисунке 1.
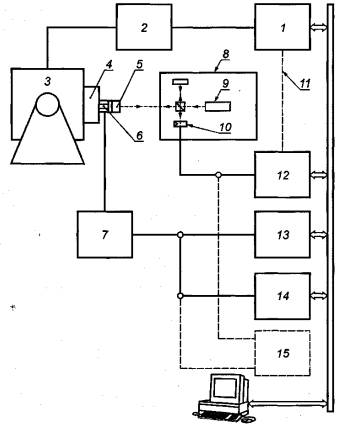
1 - генератор частоты (3.2); 2 - усилитель мощности (3.3); 3 - вибростенд (3.3); 4 - подвижная система вибростенда; 5 - имитатор; 6 - акселерометр; 7 - усилитель; 8 - интерферометр (3.6); 9 - лазер (3.5); 10 - фотодетектор; 11 - связь с измерителем отношения частот (3.7); 12 - счетчик или измеритель отношения частот (3.7); 13 - вольтметр (3.10); 14 - измеритель коэффициента гармоник (3.11); 15 - осциллограф (3.15)
Рисунок 1 - Измерительная система для метода счета полос (метод 1)
7.3 Представление результатов
Теоретические основы метода изложены в разделе В.1 приложения В.
Рассчитывают амплитуду ускорения
![]() , м/с2, на входе акселерометра по показаниям счетчика полос по формуле
, м/с2, на входе акселерометра по показаниям счетчика полос по формуле
![]()
и определяют модуль коэффициента преобразования S, В/м/с2, по формуле
![]() ,
,
где ![]() - амплитуда напряжения на выходе акселерометра, В;
- амплитуда напряжения на выходе акселерометра, В;
f - частота вибрации, возбуждаемой вибростендом, Гц;
ff - частота следования интерференционных полос (т.е. число полос, измеренное за достаточно продолжительный период времени, деленное на длительность периода времени), Гц.
Если используют измеритель отношения частоты, то амплитуду ускорения ![]() , м/с2, рассчитывают по формуле
, м/с2, рассчитывают по формуле
![]() ,
,
и определяют модуль коэффициента преобразования S, В/м/с2, по формуле
![]() ,
,
где Rf - отношение частоты следования полос ff к частоте вибрации f, измеренное на достаточном числе периодов вибрации (число периодов измерения зависит от частоты; например, при частоте 160 Гц период измерений должен составлять, по меньшей мере, 100 периодов вибрации).
В протоколе калибровки указывают результаты калибровки с расширенной неопределенностью измерений, полученной в соответствии с приложением А.
8 Метод точек минимума (метод 2)
8.1 Общие положения
Метод используют для определения модуля коэффициента преобразования в диапазоне частот от 800 Гц до 10 кГц.
Примечание - Метод 2 основан на измерении перемещения с использованием значений аргументов функции Бесселя первого рода первого порядка в точках ее пересечения с осью абсцисс (см. раздел В.2 приложения В). Тот же принцип может быть применен с использованием функции Бесселя первого рода нулевого порядка, однако в таком случае необходимо обеспечить модуляцию положения опорного зеркала (см. [5]).
8.2 Испытания
Сигнал с фотодетектора (см. 3.6) пропускают через полосовой фильтр (см. 3.8), среднегеометрическая частота которого совпадает с частотой возбуждения вибростенда. Отфильтрованный сигнал имеет точки минимума, соответствующие амплитудам перемещения, указанным в таблице 1.
Устанавливают частоту калибровки и регулируют амплитуду перемещения стола вибростенда от нуля до значения, при котором сигнал с фотодетектора после достижения максимального значения возвращается к минимальному. В данной точке минимума № 1 амплитуда перемещения равна 0,1930 мкм. Амплитуды перемещений для точек минимума других порядков приведены в таблице 1. Измерительная система для метода точек минимума показана на рисунке 2.
Таблица 1 - Амплитуды перемещения для точек минимума (λ = 0,63281 мкм)
|
Номер точки минимума |
Амплитуда перемещения |
Номер точки минимума |
Амплитуда перемещения |
|
0 |
0 |
6 |
0,9878 |
|
1 |
0,1930 |
7 |
1,1461 |
|
2 |
0,3533 |
8 |
1,3044 |
|
3 |
0,5123 |
9 |
1,4627 |
|
4 |
0,6709 |
10 |
1,6210 |
|
5 |
0,8294 |
|
|
|
11 |
1,7792 |
22 |
3,5197 |
|
12 |
1,9375 |
23 |
3,6779 |
|
13 |
2,0957 |
24 |
3,8361 |
|
14 |
2,2539 |
25 |
3,9943 |
|
15 |
2,4122 |
26 |
4,1525 |
|
16 |
2,5704 |
27 |
4,3107 |
|
17 |
2,7286 |
28 |
4,4689 |
|
18 |
2,8868 |
29 |
4,6271 |
|
19 |
3,0450 |
30 |
4,7853 |
|
20 |
3,2033 |
|
|
|
21 |
3,3615 |
|
|
Примечание 1 - Коэффициент преобразования акселерометра может быть также определен с использованием функции Бесселя первого рода нулевого порядка посредством модуляции положения опорного зеркала с частотой, которая мала по сравнению с частотой вибрации, и подстройкой среднегеометрической частоты полосового фильтра или частотного анализатора до значения, равного частоте модуляции зеркала (см. [6]).
Примечание 2 - Модуляция положения опорного зеркала может быть также применена для улучшения эффективности метода с использованием функции Бесселя первого рода первого порядка (см. [7]).
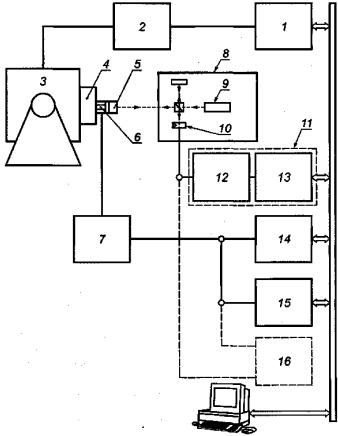
1 - генератор частоты (3.2); 2 - усилитель мощности (3.3); 3 - вибростенд (3.3); 4 - подвижная система вибростенда; 5 - имитатор; 6 - акселерометр; 7 - усилитель; 8 - интерферометр (3.6); 9 - лазер (3.5); 10 - фотодетектор; 11 - анализатор частоты (3.8); 12 - полосовой фильтр, настроенный на частоту вибрации (3.8); 13-вольтметр; 14 - вольтметр (3.10); 15 - измеритель коэффициента гармоник (3.11); 16 - осциллограф (3.15)
Рисунок 2 - Измерительная система для метода точек минимума (метод 2)
В протоколе испытаний должна быть указана неопределенность измерений в соответствии с приложением А.
8.3 Представление результатов
Теоретические основы метода изложены в разделе В.2 приложения В. Вычисляют амплитуду ускорения акселерометра ![]() , м/с2, по формуле
, м/с2, по формуле
![]() ,
,
и определяют модуль коэффициента преобразования S, В/м/с2, по формуле
![]() ,
,
где ![]() - амплитуда напряжения на выходе акселерометра, В;
- амплитуда напряжения на выходе акселерометра, В;
![]() - амплитуда перемещения для разных точек минимума в соответствии с таблицей 1;
- амплитуда перемещения для разных точек минимума в соответствии с таблицей 1;
f - частота вибрации, возбуждаемой вибростендом, Гц.
9 Метод синус-аппроксимации (метод 3)
9.1 Общие положения
Метод используют для определения модуля и/или фазового сдвига коэффициента преобразования в диапазоне частот от 1 Гц до 10 кГц.
9.2 Испытания
Измерительная система для метода синус-аппроксимации показана на рисунках 3 и 4.
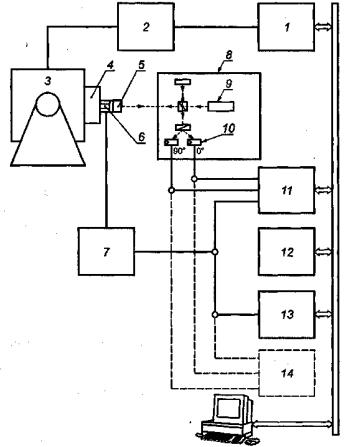
1 - генератор частоты (3.2); 2 - усилитель мощности (3.3); 3 - вибростенд (3.3); 4 - подвижная система вибростенда; 5-имитатор; 6 - акселерометр; 7-усилитель; 8 - интерферометр (3.6); 9 - лазер (3.5); 10-фотодетекторы; 11 - записывающее устройство (3.13); 12 - вольтметр (3.10); 13 - измеритель коэффициента гармоник (3.11); 14 - осциллограф (3.15)
Рисунок 3 - Измерительная система для метода синус-аппроксимации (метод 3)
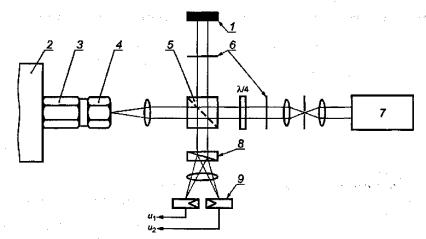
1 - опорное зеркало; 2 - подвижная система вибростенда; 3 - акселерометр; 4 - имитатор; 5 - светоделитель; б - поляризатор; 7 - лазер; 8 - призма Волластона; 9 - фотодетекторы
Рисунок 4 - Лазерный интерферометр с квадратурным выходом
Лазерный интерферометр настраивают так, чтобы его выходные квадратурные сигналы u1 и u2 были в пределах допусков, указанных в 3.6.
После настройки остальной аппаратуры проводят измерения модуля и фазового сдвига коэффициента преобразования и при заданных значениях частоты вибрации и амплитуды ускорения (см. раздел 5) следующим образом.
Акселерометр должен совершать гармонические колебания. Амплитуда перемещения должна быть достаточно большой, чтобы обеспечивать, по крайней мере, образование одной интерференционной полосы.
Примечание 1 - При амплитудах перемещения менее 0,5 мкм погрешность измерений, обусловленная изменениями квадратурных сигналов в пределах допусков, установленных в 3.6, не будет превышать 0,3 % для модуля коэффициента преобразования и 0,3° для фазового сдвига. Уменьшить погрешность можно путем более тщательной регулировки для достижения значений, меньших, чем установлено в 3.6 (см. [8]), или применением процедуры коррекции (см. [9]).
Примечание 2 - Чтобы измерить модуль и фазовый сдвиг комплексного коэффициента преобразования акселерометра при амплитудах перемещения в нанометровом диапазоне, метод синус-аппроксимации может быть применен с использованием соответствующей гетеродинной техники, как указано в [10] и [11]. Это позволяет проводить калибровку при средних уровнях амплитуд ускорения (например, 100 м/с2) на высоких частотах вибрации (например, 20 кГц).
Примечание 3 - Чтобы повысить эффективность метода, может быть использована процедура умножения значений перемещения или фазовой модуляции на весовую функцию окна (см. [12]), если при этом будут соблюдены требования к неопределенности измерений, установленные в разделе 2.
9.3 Сбор данных
Частоты среза низкочастотных и, если используются, высокочастотных фильтров должны быть выбраны таким образом, чтобы искажающие влияния от низкочастотной и высокочастотной фильтрации на результаты калибровки находились в пределах допусков (см. [8]). Частота выборки должна быть не ниже удвоенной максимальной частоты в спектре сигнала в соответствии с теоремой Найквиста-Котельникова.
Частота выборки выходного сигнала акселерометра может быть равна или ниже частоты выборки выходных сигналов интерферометра. Начало и конец выборки всех трех сигналов должны быть синхронизированы, а для выходных сигналов интерферометра процессы выборки должны быть точно синхронизированы, для чего используют один и тот же генератор тактовых импульсов.
Выборку квадратурных сигналов интерферометра осуществляют на периоде измерений Tmeas. Интервал выборки Δt = ti- ti-1 поддерживают постоянным. В результате процедуры выборки получают последовательности значений квадратурных сигналов интерферометра {u1(ti)} и {u2(ti)}, а также выходного сигнала акселерометра {u(ti)}, которые заносят в память компьютера.
9.4 Обработка данных
9.4.1 Определяют модуль и фазовый сдвиг коэффициента преобразования акселерометра, выполняя следующие действия.
9.4.2 По выборочным значениям квадратурных сигналов интерферометра {u1(ti)} и {u2(ti)}, вычисляют последовательность значений сигнала фазовой модуляции {φmod(ti)} по формуле
![]() ,
,
где n = 0, 1, 2, ....
Целое число n выбирают таким образом, чтобы избежать разрывов в сигнале фазовой модуляции.
Примечание - Метод определения n описан в [13].
9.4.3 Выборочные значения {φmod(ti)} подгонкой параметров A, B и С методом наименьших квадратов аппроксимируют зависимостью (синус-аппроксимация)
φmod(ti) = A·cosωti - A·sinωti + C,
где i = 0, 1, 2 …. N;
![]()
![]()
ω - угловая частота вибрации, ω = 2πf,
φs - начальный фазовый угол сигнала перемещения;
N + 1 - число синхронизированных выборочных значений на периоде измерений по 9.3.
Значение параметра С в дальнейших преобразованиях не используют.
9.4.4 По значениям параметров А и В, полученных в результате синус-аппроксимации, рассчитывают амплитуду ![]() фазовой модуляции и начальный фазовый угол φs по формулам:
фазовой модуляции и начальный фазовый угол φs по формулам:
![]() ,
,
![]() ,
,
9.4.5 Рассчитывают амплитуду ускорения а и начальный фазовый угол ускорения φа по формулам:
![]() ,
,
φа = φs + π,
9.4.6 Аналогично методом синус-аппроксимации выборочные значения выходного сигнала акселерометра {u(ti)} аппроксимируют зависимостью
u(ti) = Aucosωti – Businωti + Cu,
где ![]() ;
;
![]() ;
;
![]() - амплитуда выходного сигнала акселерометра;
- амплитуда выходного сигнала акселерометра;
φu - начальный фазовый угол выходного сигнала акселерометра.
9.4.7 Рассчитывают амплитуду и выходного сигнала акселерометра и начальный фазовый угол φu по формулам:
![]() ,
,
![]() ,
,
9.4.8 На основе результатов 9.4.5
и 9.4.7
рассчитывают модуль ![]() и фазовый сдвиг Δφ комплексного коэффициента преобразования акселерометра по формулам:
и фазовый сдвиг Δφ комплексного коэффициента преобразования акселерометра по формулам:
![]() ,
,
Δφ = (φu - φa),
В протоколе калибровки результаты расчетов указывают с расширенной неопределенностью измерений, полученной в соответствии с приложением А (где для обозначения модуля коэффициента
преобразования акселерометра для простоты вместо символа ![]() использовано обозначение S).
использовано обозначение S).
10 Протокол калибровки
В протоколе калибровки в нем, кроме указания использованного метода калибровки, приводят следующую информацию:
a) условия окружающей среды:
- температуру акселерометра,
- температуру окружающего воздуха;
b) сведения об условиях крепления акселерометра:
- материал поверхности, на которую устанавливают акселерометр,
- момент затяжки акселерометра (если его устанавливают на шпильку),
- материал смазки, наносимой на монтажную поверхность (если такая использовалась),
- способ закрепления кабеля,
- ориентацию акселерометра;
c) сведения об имитаторе (если использовался):
- материал, из которого он изготовлен, размеры (длина, ширина), масса,
- момент затяжки при установке,
- значения корректирующего множителя для модуля коэффициента преобразования и коррекции по фазовому сдвигу, используемые для компенсации эффектов относительного движения верхней и нижней поверхности имитатора (при необходимости);
d) средства отражения луча лазера:
- используемый рефлектор (полированная поверхность или зеркало),
- положение лазерного пятна на отражающей поверхности;
e) настройки усилителя (если использовались), например:
- положение регулятора коэффициента усиления,
- значения частот среза фильтров;
f) результаты калибровки:
- амплитуды и частоты ускорения, на которых проводилась калибровка,
- значение коэффициента преобразования (модуля и, если измерялся, фазового сдвига),
- расширенную неопределенность измерений и используемое значение коэффициента охвата k (если было использовано значение k, отличное от двух).
Приложение А
(обязательное)
Составляющие неопределенности измерений при первичной калибровке акселерометров методами лазерной интерферометрии
А.1 Вычисление относительной расширенной неопределенности измерений модуля коэффициента преобразования и расширенной неопределенности фазового сдвига коэффициента преобразования для частот, амплитуд и настроек усилителя, при которых проводилась калибровка
А.1.1 Вычисление Urel(S) для метода 1
Относительную расширенную неопределенность измерений модуля коэффициента преобразования Urel(S) для частот, амплитуд и настроек усилителя, при которых проводилась калибровка, вычисляют в соответствии с [2] по формулам:
Urel(S) = k·uc,rel(S),
![]() ,
,
с коэффициентом охвата k = 2 (см. таблицу А.1).
Таблица А.1
|
Составляющая стандартной неопределенности u(xi) |
Источник неопределенности |
Вклад в неопределенность ui(y) |
|
|
Измерение выходного напряжения акселерометра (вольтметр) |
u1(S) |
|
|
Влияние суммарного искажения на измерение выходного напряжения акселерометра |
u2(S) |
|
|
Влияние поперечного и углового ускорений на измерение выходного напряжения акселерометра (коэффициент поперечного преобразования) |
u3(S) |
|
|
Влияние дискретизации сигнала перемещения на измерения перемещения |
u4(S) |
|
|
Влияние гистерезиса триггера на измерение перемещения |
u5(S) |
|
|
Влияние фильтрации на измерение перемещения (спадов частотной характеристики фильтра) |
u6(S) |
|
|
Влияние помех в сигнале напряжения на измерение перемещения (например, случайный шум в цепи фотодетектора) |
u7(S) |
|
|
Влияние искажения движения на измерение перемещения (например, общее искажение, относительное движение поверхности эталонного акселерометра и лазерного пятна интерферометра) |
u8(S) |
|
|
Влияние фазовых искажений на измерение перемещения (например, фазовый шум сигнала интерферометра) |
u9(S) |
|
|
Остаточные интерференционные влияния на измерение перемещения (функция интерферометра) |
u10(S) |
|
u(fFQ) |
Измерение частоты вибрации (генератор частоты и показывающее устройство) |
u11(S) |
|
u(SRE) |
Остаточные влияния на измерение коэффициента преобразования (например, случайные эффекты в повторных измерениях; выборочные стандартные отклонения среднего арифметического) |
u12(S) |
А.1.2 Вычисление urel(S) для метода 2
Вычисление выполняют аналогично А.1.1 с использованием составляющих неопределенности, указанных в таблице А.2
Таблица А.2
|
Составляющая стандартной неопределенности u(xi) |
Источник неопределенности |
Вклад в неопределенность ui(y) |
|
|
Измерение выходного напряжения акселерометра (вольтметр) |
u1(S) |
|
|
Влияние суммарного искажения на измерение выходного напряжения акселерометра |
u2(S) |
|
|
Влияние поперечного и углового ускорений на измерение выходного напряжения акселерометра (коэффициент поперечного преобразования) |
u3(S) |
|
|
Влияние разрешающей способности в точке минимума на измерение перемещения |
u4(S) |
|
|
Влияние помех в сигнале напряжения на измерение перемещения (например, наводки и собственный электрический шум в цепи) |
u5(S) |
|
|
Влияние искажения движения на измерение перемещения (например, общее искажение, относительное движение поверхности эталонного акселерометра и лазерного пятна интерферометра) |
u6(S) |
|
|
Остаточные интерференционные влияния на измерение перемещения (функция интерферометра) |
u7(S) |
|
u(fFG) |
Измерение частоты вибрации (генератор частоты и показывающее устройство) |
u8(S) |
|
u(SRE) |
Остаточные влияния на измерение коэффициента преобразования (например, случайные эффекты в повторных измерениях; выборочные стандартные отклонения среднего арифметического) |
u9(S) |
А.1.3 Вычисление urel(S) и U(Δφ) для метода 3
А.1.3.1 Вычисление urel(S)
Вычисление выполняют аналогично А.1.1 с использованием составляющих неопределенности, указанных в таблице А.3.
Таблица А.3
|
Составляющая стандартной неопределенности u(xi) |
Источник неопределенности |
Вклад в неопределенность ui(y) |
|
|
Измерение выходного напряжения акселерометра (устройство записи, например, разрешение аналого-цифрового преобразования) |
u1(S) |
|
|
Влияние фильтрации на измерение амплитуды выходного напряжения акселерометра (ограниченность полосы частот) |
u2(S) |
|
|
Влияние искажений напряжения на измерение выходного напряжения акселерометра (например, помехи и электрический шум в цепи) |
u3(S) |
|
|
Влияние поперечного и углового ускорений на измерение выходного напряжения акселерометра (коэффициент поперечного преобразования) |
u4(S) |
|
|
Влияние искажений квадратурного выходного сигнала интерферометра на измерение амплитуды фазовой модуляции (например, сдвиг нуля, отклонение амплитуды напряжения, отклонение от 90° номинальной разности фаз квадратурных составляющих) |
u5(S) |
|
|
Влияние фильтрации сигнала интерферометра на измерение амплитуды фазовой модуляции (ограниченность полосы частот) |
u6(S) |
|
|
Влияние искажения напряжения на измерение амплитуды фазовой модуляции (например, случайный шум в фотоэлектрических измерительных цепях) |
u7(S) |
|
|
Влияние искажения движения на измерение амплитуды фазовой модуляции (например, относительное движение поверхности эталонного акселерометра и лазерного пятна интерферометра) |
u8(S) |
|
|
Влияние фазовых искажений на измерение амплитуды фазовой модуляции (например, фазовый шум сигнала интерферометра) |
u9(S) |
|
|
Остаточные интерференционные влияния на измерение амплитуды фазовой модуляции (функция интерферометра) |
u10(S) |
|
u(fFG) |
Измерение частоты вибрации (генератор частоты и показывающее устройство) |
u11(S) |
|
u(SRE) |
Остаточные влияния на измерение коэффициента преобразования (например, случайные эффекты в повторных измерениях; выборочные стандартные отклонения среднего арифметического) |
u12(S) |
А.1.3.2 Вычисление U(Δφ)
Расширенную неопределенность измерений фазового сдвига коэффициента преобразования U(Δφ) для частот, амплитуд и настроек усилителя, при которых проводилась калибровка, вычисляют в соответствии с [2] по формулам:
U(Δφ) = k·uc(Δφ),
![]() ,
,
с коэффициентом охвата k = 2 (см. таблицу А.4).
Таблица А.4
|
Составляющая стандартной неопределенности u(xi) |
Источник неопределенности |
Вклад в неопределенность ui(y) |
|
u(φu, v) |
Измерение выходного напряжения акселерометра (устройство записи, например, разрешение аналого-цифрового преобразования) |
u1(Δφ) |
|
u(φu, F) |
Влияние фильтрации на измерение фазы выходного напряжения акселерометра (ограниченность полосы частот) |
u2(Δφ) |
|
u(φu, D) |
Влияние искажений напряжения на измерение фазы выходного напряжения акселерометра (например, помехи и электрический шум в цепи) |
u3(Δφ) |
|
u(φu, T) |
Влияние поперечного и углового ускорений на измерение фазы выходного напряжения акселерометра (коэффициент поперечного преобразования) |
u4(Δφ) |
|
u(φs, Q) |
Влияние искажений квадратурного выходного сигнала интерферометра на измерение фазы перемещения (например, сдвиг нуля, отклонение амплитуды напряжения, отклонение от 90° номинальной разности фаз квадратурных составляющих) |
u5(Δφ) |
|
u(φs, F) |
Влияние фильтрации сигнала интерферометра на измерение фазы перемещения (ограниченность полосы частот) |
u6(Δφ) |
|
u(φs, VD) |
Влияние искажения напряжения на измерение фазы перемещения (например, случайный шум в фотоэлектрических измерительных цепях) |
u7(Δφ) |
|
u(φu, MD) |
Влияние искажения движения на измерение фазы перемещения (например, относительное движение поверхности эталонного акселерометра и лазерного пятна интерферометра) |
u8(Δφ) |
|
u(φs, PD) |
Влияние фазовых искажений на измерение фазы перемещения (например, фазовый шум сигнала интерферометра) |
u9(Δφ) |
|
u(φs, RE) |
Остаточные интерференционные влияния на измерение фазы перемещения (функция интерферометра) |
u10(Δφ) |
|
u(ΔφRE) |
Остаточные влияния на измерение фазового сдвига коэффициента преобразования (например, случайные эффекты в повторных измерениях; выборочные стандартные отклонения среднего арифметического) |
u11(Δφ) |
A.2 Вычисление относительной расширенной неопределенности измерений модуля коэффициента преобразования и расширенной неопределенности фазового сдвига коэффициента преобразования во всем диапазоне частот и амплитуд
А.2.1 Вычисление Urel(St)
Относительная расширенная неопределенность измерений модуля коэффициента преобразования Urel(S), вычисленная согласно А.1.1, А.1.2 или А.1.3.1, справедлива только для частот, амплитуд и настроек усилителя, при которых была проведена калибровка. Относительную расширенную неопределенность измерений модуля коэффициента преобразования Urel(St) для всего диапазона частот и амплитуд в любой момент времени между последовательными калибровками вычисляют по формулам:
Urel(St) = k·uc,rel(St),
![]() ,
,
с коэффициентом охвата k = 2 (см. таблицу А.5).
Таблица А.5
|
Составляющая стандартной неопределенности u(xi) |
Источник неопределенности |
Вклад в неопределенность ui(y) |
|
u(S) |
Неопределенность модуля коэффициента преобразования для частот, амплитуд и настроек усилителя, при которых проводилась калибровка, в соответствии с А.1.1, А.1.2 или А.1.3.1 |
u1(St) |
|
u(eT,A) |
Отклонение коэффициента усиления от номинального при разных настройках усилителя |
u2(St) |
|
u(eL,f,A) |
Отклонение амплитудно-частотной характеристики усилителя от постоянного значения в диапазоне частот акселерометра |
u3(St) |
|
u(eL,f,P) |
Отклонение модуля коэффициента преобразования от постоянного значения в диапазоне частот акселерометра |
u4(St) |
|
u(eL,a,A) |
Нелинейность усилителя |
u5(St) |
|
u(eL,a,P) |
Нелинейность акселерометра |
u6(St) |
|
u(eL,A) |
Нестабильность во времени коэффициента усиления усилителя и влияние на коэффициент усиления выходного импеданса акселерометра |
u7(St) |
|
u(ei,P) |
Нестабильность во времени модуля коэффициента преобразования акселерометра |
u8(St) |
|
u(eE,A) |
Влияние изменения условий внешней среды на коэффициент усиления усилителя |
u9(St) |
|
u(eE,P) |
Влияние изменения условий внешней среды на модуль коэффициента преобразования акселерометра |
u10(St) |
А.2.2 Вычисление U(Δφt)
Расширенная неопределенность измерений сдвига фаз коэффициента преобразования U(Δφ), вычисленная согласно А.1.3.2, справедлива только для частот, амплитуд и настроек усилителя, при которых была проведена калибровка. Расширенную неопределенность измерений сдвига фаз коэффициента преобразования U(Δφt) для всего диапазона частот и амплитуд в любой момент времени между последовательными калибровками вычисляют по формулам:
U(Δφt) = kuc(Δφt),
![]() ,
,
с коэффициентом охвата k = 2 (см. таблицу А.6).
Таблица А.6
|
Составляющая стандартной неопределенности u(xi) |
Источник неопределенности |
Вклад в неопределенность ui(y) |
|
u(Δφ) |
Неопределенность сдвига фаз коэффициента преобразования для частот, амплитуд и настроек усилителя, при которых проводилась калибровка, в соответствии с А.1.3.2 |
u1(Δφt) |
|
|
Отклонение коэффициента усиления от номинального при разных настройках усилителя |
u2(Δφt) |
|
|
Отклонение фазочастотной характеристики усилителя от номинальной в диапазоне частот акселерометра |
u3(Δφt) |
|
|
Отклонение сдвига фаз коэффициента преобразования от номинального в диапазоне частот акселерометра |
u4(Δφt) |
|
|
Влияние амплитуды на фазочастотную характеристику усилителя |
u5(Δφt) |
|
|
Влияние амплитуды на сдвиг фаз коэффициента преобразования акселерометра |
u6(Δφt) |
|
|
Нестабильность во времени фазочастотной характеристики усилителя и влияние на фазочастотную характеристику выходного импеданса акселерометра |
u7(Δφt) |
|
|
Нестабильность во времени сдвига фаз коэффициента преобразования акселерометра |
u8(Δφt) |
|
|
Влияние изменения условий внешней среды на фазочастотную характеристику усилителя |
u9(Δφt) |
|
|
Влияние изменения условий внешней среды на сдвиг фаз коэффициента преобразования акселерометра |
u10(Δφt) |
Приложение В
(обязательное)
Расчетные формулы
B.1 Метод 1
Длина волны λ основной линии в спектре излучения неона равна 0,63281 мкм при давлении 100 кПа. Перемещение Δs на входе акселерометра, соответствующее расстоянию между двумя соседними полосами (между соседними максимумами или минимумами) интерферометра, определяют по длине волны λ по формуле
Δs = λ/2,
Таким образом, число максимумов за один период вибрации, и, соответственно, амплитуду перемещения ![]() можно определить по формулам:
можно определить по формулам:
![]() ,
,
![]() ,
,
где f - частота вибрации, возбужденной вибростендом;
ff - частота следования полос в интерферометре.
На основе полученного значения ![]() амплитуду ускорения
амплитуду ускорения ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]()
![]() .
.
B.2 Метод 2
Анализируя частотный спектр интенсивности и подбирая регулировки амплитуды перемещения стола вибростенда, при которых составляющая спектра на частоте вибрации становится равной нулю, можно определить амплитуды перемещения и ускорения стола по формулам:
![]()
![]() ,
,
где хn - аргументы функции Бесселя в точках ее пересечения с осью абсцисс, указанные в таблице В.1.
Таблица В.1 - Значения аргументов хn функции Бесселя первого рода первого порядка в точках пересечения с осью абсцисс
|
Номер точки пересечения |
хn |
Номер точки пересечения |
хn |
|
0 |
0 |
13 |
41,61709 |
|
1 |
3,83170 |
14 |
44,75932 |
|
2 |
7,01559 |
15 |
47,90146 |
|
3 |
10,17346 |
16 |
51,04353 |
|
4 |
13,32369 |
17 |
54,18556 |
|
5 |
16,47063 |
18 |
57,32753 |
|
6 |
19,61586 |
19 |
60,46945 |
|
7 |
22,76009 |
20 |
63,61136 |
|
8 |
25,90368 |
21 |
66,75323 |
|
9 |
29,04683 |
22 |
69,89507 |
|
10 |
32,18968 |
23 |
73,03690 |
|
11 |
35,33230 |
24 |
76,17870 |
|
12 |
38,47477 |
25 |
79,32049 |
|
26 |
82,46227 |
29 |
91,88752 |
|
27 |
85,60402 |
30 |
95,02924 |
|
28 |
88,74577 |
|
|
В.3 Метод 3
В соответствии с [2] комплексный коэффициент преобразования преобразователя по ускорению Sa можно определить формулой
|
|
(В.1) |
|
где |
модуль коэффициента преобразования;
![]() - амплитуда выходного сигнала акселерометра (или усилителя, если акселерометр калибруют совместно
с усилителем);
- амплитуда выходного сигнала акселерометра (или усилителя, если акселерометр калибруют совместно
с усилителем);
![]() - амплитуда ускорения стола вибростенда а;
- амплитуда ускорения стола вибростенда а;
φu - начальный фазовый угол выходного сигнала;
φа - начальный фазовый угол ускорения;
|
Δφ = φu - φa- |
(B.3) |
сдвиг фаз коэффициента преобразования.
Амплитуда ![]() и фаза φа ускорения могут быть получены по значениям амплитуды перемещения
и фаза φа ускорения могут быть получены по значениям амплитуды перемещения ![]() , частоты f (угловой частоты ω = 2πf) и начальной фазы перемещения φs по формулам:
, частоты f (угловой частоты ω = 2πf) и начальной фазы перемещения φs по формулам:
Если вибростенд воспроизводит гармоническую вибрацию, то
|
|
(B.6) |
а выходной сигнал акселерометра может быть выражен формулой
|
|
(B.7) |
Выходной сигнал первого фотодетектора может быть представлен формулой
|
|
(B.8) |
где φmod - модулированная фаза сигнала,
|
|
(B.9) |
состоящая из начальной фазы сигнала фотодетектора φ0 и модуляционной составляющей φм, амплитуда ![]() которой пропорциональна перемещению:
которой пропорциональна перемещению:
|
|
(B.10) |
|
|
(B.11) |
Предполагают, что сдвиг фаз между перемещением s(t) и синусоидальной фазой φM(t) отсутствует.
Выходной сигнал второго фотодетектора находится в квадратуре по отношению к первому и выражается формулой
|
|
(B.12) |
причем ![]()
Квадратурные сигналы подвергают выборке с постоянным значением периода выборки Δt = ti – ti-1 в течение периода измерения Tmeas, позволяющей получить серии выборочных значений {u1{ti)} и u2{ti)}.
По обоим квадратурным сигналам последовательно в каждый момент времени в течение периода измерений вычисляют φmod(ti) по формуле
|
|
(B.13) |
где n = 0, 1, 2, ...
Требуемые для расчета процедуры, в том числе вычисления функции арктангенса (см. [13]), являются стандартными в цифровой обработке сигналов. По значениям φmod(ti) могут быть получены параметры φM и φs модуляционной составляющей фазы φм(t) подгонкой методом наименьших квадратов (синус-апрроксимации) функции
|
|
(B.14) |
линейной относительно параметров
|
|
(B.15) |
и постоянной С.
N + 1 - число синхронизированных выборочных значений в квадратурных сигналах на выходе фотодетекторов на периоде измерений.
По значениям параметров А и В рассчитывают амплитуду ![]() фазовой модуляции и начальный фазовый угол
φs по формулам:
фазовой модуляции и начальный фазовый угол
φs по формулам:
|
|
(B.16) |
|
|
(B.17) |
Примечание - Для упрощения записи в формулах настоящего приложения не делается различия между оценкой величины [например, ![]() в формуле (В.16)], и ее «истинным» значением [например,
в формуле (В.16)], и ее «истинным» значением [например, ![]() в формуле (В.11)].
Там, где это необходимо для выражения неопределенности измерений, такое различие необходимо учитывать (см., например, [8]).
в формуле (В.11)].
Там, где это необходимо для выражения неопределенности измерений, такое различие необходимо учитывать (см., например, [8]).
Для получения значения амплитуды ускорения ![]() формулу (В.11) следует подставить в формулу (В.4). Расчетная формула имеет вид
формулу (В.11) следует подставить в формулу (В.4). Расчетная формула имеет вид
|
|
(B.18) |
Фазу ускорения рассчитывают по формуле (В.5). Амплитуда ![]() и фаза φ выходного сигнала акселерометра могут быть определены таким же путем, как соответствующие параметры модуляции фазы
и фаза φ выходного сигнала акселерометра могут быть определены таким же путем, как соответствующие параметры модуляции фазы ![]() и φs посредством синус-аппроксимации выборки значений выходного сигнала {u(ti)} с использованием формул, аналогичных (В.14) - (В.17).
Подстановкой в формулы (В.2) и (В.3) полученных значений
и φs посредством синус-аппроксимации выборки значений выходного сигнала {u(ti)} с использованием формул, аналогичных (В.14) - (В.17).
Подстановкой в формулы (В.2) и (В.3) полученных значений ![]() , φu,
, φu, ![]() и φа можно определить
модуль
и φа можно определить
модуль ![]() и фазовый сдвиг Δφ коэффициента преобразования акселерометра.
и фазовый сдвиг Δφ коэффициента преобразования акселерометра.
Формулы, приведенные выше, в особенности (В.8) и (В.12),
предполагают идеальные условия, которые невыполнимы на практике. В реальности сигналы фотодетекторов могут иметь несколько отличающиеся друг от друга
амплитуды ![]() и
и ![]() , а фазовый сдвиг между квадратурными составляющими может быть несколько отличен от π/2. Кроме того, на практике могут наблюдаться сдвиги нулевого уровня сигналов фотодетекторов. Влияние неидеальности квадратурных сигналов в пределах допустимых значений, указанных в 3.6, кратко описаны в 9.2 (примечание 1) (более подробно данный вопрос исследован в [8]).
, а фазовый сдвиг между квадратурными составляющими может быть несколько отличен от π/2. Кроме того, на практике могут наблюдаться сдвиги нулевого уровня сигналов фотодетекторов. Влияние неидеальности квадратурных сигналов в пределах допустимых значений, указанных в 3.6, кратко описаны в 9.2 (примечание 1) (более подробно данный вопрос исследован в [8]).
Библиография
|
ISO 266, Acoustics - Preferred frequencies |
|
|
ISO 16063-1, Methods for the calibration of vibration and shock transducers - Parti: Basic concepts |
|
|
ISO 5348, Mechanical vibration and shock - Mechanical mounting of accelerometers |
|
|
von Martens H.-J. Interferometric counting
methods for measuring displacements in the range 10-9m to |
|
|
Robinson D.C., Serbyn M.R. and Payne B.F. A description of NBS Calibration Services in mechanical vibration and shock. NBS Technical Note, 1232, 1987 |
|
|
Smith V.A., Edelman S., Smith E.R. and Pierce
E.T. Modulated photoelectric measurement of vibration. Journal of the Acoustical Society of |
|
|
|
|
|
Link A. and von Martens H.-J. Proposed primary calibration method for amplitude and phase response of accelerometers. ISO/ТС 108/SC 3/WG 6 N 59, Sept. 1995 |
|
|
Heydemann P.L.M. Determination and correction of quadrature fringe measurement errors in interferometers. Applied Optics, 20, No. 19,1981, pp. 3382-3384 |
|
|
[10] |
Link A., Gerhardt J. and von Martens H.-J. Amplitude and phase calibration of accelerometers in the nanometer range by heterodyne interferometry. SPIE, 2868, 1996, pp. 37-48 |
|
[11] |
Wabinski W. and von Martens H.-J. Time interval analysis of interferometer signals for measuring amplitude and phase of vibrations. SPIE, 2868,1996, pp. 166-177 |
|
[12] |
Sill R.D. Accelerometer calibration to 50 kHz
with a quadrature laser interferometer.
Proceedings NCSL, Workshop & Symposium,
Session 7B, |
|
[13] |
Tribolet J.M. A new phase unwrapping algorithm. IEEE Transactions on Acoustics, Speech, and Signal Processing, ASSP-25, No. 2, pp. 170-177, April 1977 |
|
[14] |
von Martens H.-J. Investigations into the uncertainties of interferometric measurements of linear and torsional vibrations. Shock and vibration, 4, No. 5/6,1977, pp. 327-340 |
Ключевые слова: вибрация, акселерометр, калибровка, лазер, интерферометр