ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р ИСО |

Машины землеройные
ГИДРАВЛИЧЕСКИЕ ЭКСКАВАТОРЫ И ЭКСКАВАТОРЫ-ПОГРУЗЧИКИ
Методы измерения усилий на рабочих органах
ISO 6015:2006
Earth-moving machinery - Hydraulic
excavators and backhoe loaders - Methods of determining tool forces
(IDT)
|
|
Москва Стандартинформ 2011 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом «Центральный научно-испытательный полигон строительных и дорожных машин» (ОАО «ЦНИП СДМ») на основе собственного аутентичного перевода на русский язык стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 267 «Строительно-дорожные машины и оборудование»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 30 ноября 2010 г. № 586-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 6015:2006 «Машины землеройные. Гидравлические экскаваторы и экскаваторы-погрузчики. Методы определения усилий на рабочих органах» (ISO 6015:2006 «Earth-moving machinery - Hydraulic excavators and backhoe loaders - Methods of determining tool forces»).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены)или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Содержание
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Машины землеройные
ГИДРАВЛИЧЕСКИЕ ЭКСКАВАТОРЫ И ЭКСКАВАТОРЫ-ПОГРУЗЧИКИ
Методы измерения усилий на рабочих органах
Earth-moving machinery. Hydraulic excavators and backhoe loaders. Methods of determining tool forces
Дата введения - 2012-01-01
1 Область применения
Настоящий стандарт устанавливает методы измерения и расчета усилий на рабочих органах гидравлических экскаваторов и экскаваторном оборудовании экскаваторов-погрузчиков по ИСО 6165.
2 Нормативные ссылки
Для документов, содержащих обозначение даты их принятия, действительным является приведенное в настоящем разделе издание. Для документов без указания даты действительным является последнее издание документа (со всеми поправками и изменениями).
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты:
ИСО 6016:1998 Машины землеройные. Методы измерения массы машин в целом, их оборудования и узлов (ISO 6016:1998 Earth-moving machinery. Methods of measuring the masses of whole machines, their equipment and components)
ИСО 6165 Машины землеройные. Основные типы. Идентификация, термины и определения (ISO 6165 Earth-moving machinery. Basic types. Vocabulary)
ИСО 6746-1:2003 Машины землеройные. Определение размеров и коды. Часть 1. Базовая машина (ISO 6746-1:2003 Earth-moving machinery. Definitions of dimensions and codes. Part 1: Base machine)
ИСО 7135:1993 Машины землеройные. Гидравлические экскаваторы. Терминология и торговые технические условия (ISO 7135:1993 Earth-moving machinery. Hydraulic excavators. Terminology and commercial specifications)
ИСО 7451:1997 Машины землеройные. Расчет вместимости ковшей гидравлических экскаваторов типа обратной лопаты (ISO 7451:2007 Earth-moving machinery. Volumetric ratings for hydraulic excavator buckets and backhoe loader buckets)
ИСО 7546:1983 Машины землеройные. Ковши погрузчиков и погрузочные ковши экскаваторов. Расчет вместимости (ISO 7546:1983 Earth-moving machinery. Loader and front loading excavator buckets. Volumetric ratings)
ИСО 9248:1992 Машины землеройные. Единицы измерения размеров, эксплуатационных показателей производительности и допуски на измерения (ISO 9248:1992 Earth-moving machinery. Units for dimensions, performance and capacities, and their measurement accuracies)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 усилие на рабочем органе (tool force): Усилие, развиваемое на краю ковша или на режущей кромке, но не на наконечнике зуба, при независимой работе гидроцилиндра ковша или гидроцилиндра рукояти.
3.2 усилие, развиваемое гидроцилиндром рукояти (arm cylinder tool force): Усилие, возникающее на краю ковша, когда в процессе копания гидроцилиндр обеспечивает поворот рукояти относительно ее шарнира.
Примечание - При использовании ковша «обратная лопата» край ковша должен двигаться по направлению к базовой машине.
3.3 усилие, развиваемое на рабочем органе гидроцилиндром рукояти на уровне грунта (arm cylindertool force at level crowd), оборудование «прямая лопата» (shovel equipment): Горизонтальное усилие, развиваемое на краю ковша гидроцилиндром рукояти, когда ковш параллелен поверхности грунта и его кромка находится на линии грунта.
3.4 усилие, развиваемое гидроцилиндром ковша (bucket cylinder tool force): Усилие, развиваемое гидроцилиндром на краю ковша и обеспечивающее вращающий момент относительно его шарнира.
Примечание - Край ковша двигается по направлению к базовой машине, когда используют ковш «обратная лопата», и от базовой машины, когда используют ковш «прямая лопата».
3.5 усилие на ковше, развиваемое гидроцилиндром телескопической стрелы (crowd tool force) (гидравлические экскаваторы с телескопической стрелой) (hydraulic excavators with telescoping boom): Усилие на рабочем органе, возникающее на краю ковша экскаватора при втягивании телескопической стрелы.
3.6 номинальное усилие на рабочем органе (rated tool force): Усилие, измеренное или рассчитанное, которое устанавливает изготовитель.
3.7 действительное усилие на рабочем органе (actual tool force): Измеренное усилие, создаваемое на ковше без опрокидывания или скольжения базовой машины.
3.8 максимальное усилие на рабочем органе, развиваемое гидроцилиндром рукояти, гидроцилиндром ковша, гидроцилиндром телескопической стрелы (maximum [arm cylinder] [bucket cylinder] [crowd] tool force: Максимальное измеренное или рассчитанное усилие на рабочем органе.
3.9 усилие замыкания захвата грейфера (grab [clamshell] closing force): Усилие, создаваемое между режущими кромками или зубьями челюстей захвата (грейфера) при их замыкании.
3.10 максимальное усилие замыкания захвата (грейфера) (maximum grab [clamshell] closing force): Максимальное измеренное или рассчитанное усилие между челюстями захвата (грейфера) при их замыкании.
3.11 радиус А усилия на рукояти (arm force radius А): Радиус дуги, которая проходит через режущую кромку ковша и центр которой является центром шарнира рукояти (см. рисунок 5).
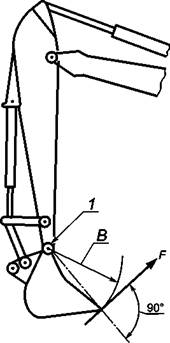
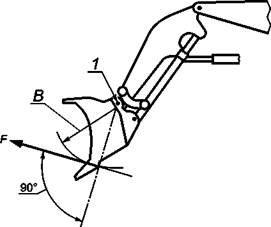
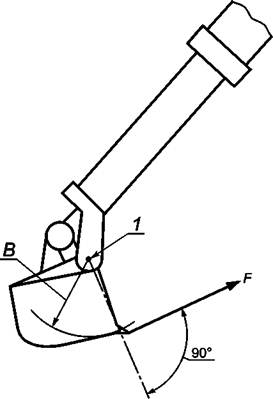
3.12 радиус В усилия на ковше (bucketforce radius В): Радиус дуги, которую описывает режущая кромка ковша и центром которой является центр шарнира ковша (см. рисунок 6).
3.13 радиус С усилия на ковше (grab [clamshell] force radius С): Радиус дуги, которую описывает край челюсти или грейфера и центром которой является центр шарнира челюсти или грейфера (см. рисунок 7).
3.14 рабочая масса ОМ (operating mass ОМ): Масса базовой машины с оборудованием и порожними принадлежностями в соответствии со спецификацией изготовителя.
[ИСО 6016:1998, статья 3.2.1]
3.15 рабочее давление в гидросистеме (working circuit hydraulic pressure): Стандартное рабочее давление, создаваемое насосом(ами) в данной гидросистеме.
3.16 максимальное давление разгрузки гидросистемы (maximum relief circuit hydraulic pressure): Максимальное статическое давление в данной гидросистеме, ограниченное настройкой предохранительного клапана при расходе не более 10 % установленного расхода в гидросистеме.
3.17 гидравлическое ограничение (hydraulic limit): Условие, при котором усилие на рабочем органе ограничено максимальным давлением настройки предохранительного клапана гидросистемы.
3.18 ограничение по опрокидыванию (tipping limit): Условие, при котором усилие на рабочем органе ограничено началом опрокидывания машины.
3.19 ограничение по скольжению (slipping limit): Условие, при котором усилие на рабочем органе ограничено началом скольжения машины по поверхности площадки для измерений.
4 Методы испытаний
4.1 Площадка для испытаний и общие положения
Площадка должна быть горизонтальной, иметь твердую поверхность, с местами для анкеров и пространством для размещения средств измерений, определенных в 4.2.1 - 4.2.3.
Для измерений, выполняемых ниже грунтовой плоскости, требуется пространство ниже плоскости грунта для размещения инструментов машины, средств измерения, анкеров и необходимого вспомогательного оборудования.
Все измерения должны быть выполнены с точностью ± 2 % или соответствовать международному стандарту, определяющему точность средств измерения.
Предпочтительным является метод, при котором измеряемую силу прикладывают непосредственно к измерительному устройству (см. 4.2.1). Если силу прикладывают через блок, во внимание следует принимать потери на трение. Длина стального каната должна быть по возможности минимизирована для уменьшения погрешности.
4.2 Средства измерения и вспомогательное оборудование
4.2.1 Устройство для измерения усилия, точность - по ИСО 9248.
4.2.2 Устройство для измерения давления масла, точность - по ИСО 9248.
4.2.3 Средство(а) для измерения линейных размеров, точность - по ИСО 9248.
4.2.4 Стальные канаты и хомуты, шкивы, страховочные цепи и регулируемые опоры.
4.3 Подготовка к испытаниям
Машина должна быть оборудована в соответствии с требованиями ИСО 6016.
В состав оборудования машины должны входить ковш, захват или грейфер и необходимые противовесы, а давление в шинах или натяжение гусениц должно соответствовать рекомендациям изготовителя.
Используемое оборудование - ковш «прямая лопата», ковш «обратная лопата», захват или грейфер - для каждого испытания должны соответствовать требованиям изготовителя.
Перед испытаниями двигатель и гидросистема должны иметь указанную изготовителем рабочую температуру. Рабочее давление в гидросистеме и максимальное давление настройки предохранительного клапана должны быть проверены с точностью по 4.2.2 и приведены в соответствие с требованиями изготовителя.
Машина должна быть установлена на площадке для измерений. Ковш или другое рабочее оборудование должны быть присоединены к устройству для измерения усилия, как это показано на рисунках 1 - 4.
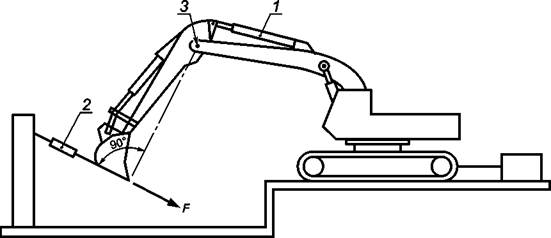
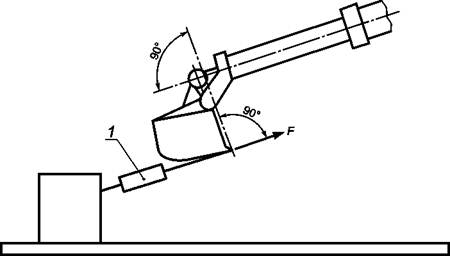
а) Гидравлический экскаватор с ковшом «обратная лопата»
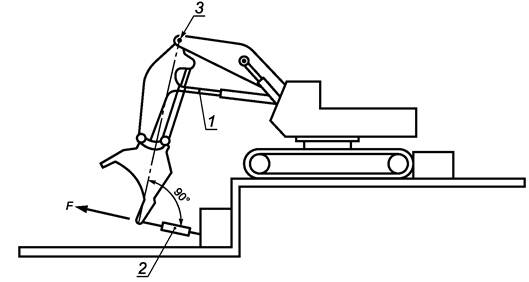
b) Гидравлический экскаватор с ковшом «прямая лопата»
F - усилие на рабочем органе, 1 - гидроцилиндр рукояти, 2 - динамометр, 3 - шарнир рукояти
Рисунок 1 - Типовая схема измерения максимального усилия, развиваемого гидроцилиндром рукояти (см. 4.8.2)
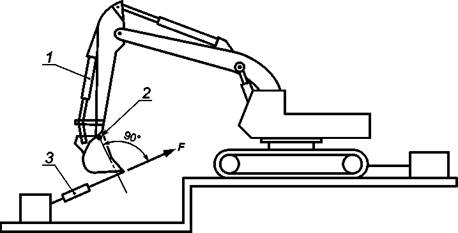
а) Гидравлический экскаватор с ковшом «обратная лопата»
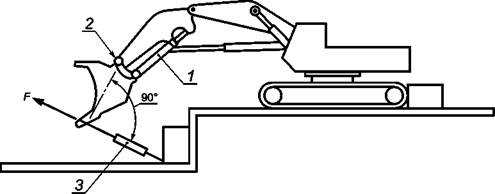
b) Гидравлический экскаватор с ковшом «прямая лопата»
F - усилие на рабочем органе, 1 - гидроцилиндр ковша, 2 - шарнир ковша, 3 - динамометр
Рисунок 2 - Типовая схема измерения максимального усилия, развиваемого гидроцилиндром ковша (см. 4.8.3)
F - усилие на рабочем органе, 1 - динамометр
Рисунок
3 - Гидравлический экскаватор, оборудованный телескопической стрелой. Типовая
схема измерения
максимального усилия на ковше, развиваемого гидроцилиндром телескопической
стрелы (см. 4.8.4)
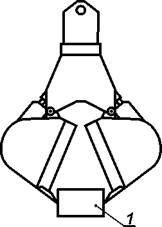
1 - динамометр
Рисунок 4 - Захват или грейфер. Типовая схема измерения усилия замыкания захвата (грейфера) (см. 4.8.5)
4.4 Требования к испытаниям
Испытания следует проводить при работе машины в соответствии с инструкциями изготовителя при соблюдении всех правил безопасности.
Должны быть установлены страховочные цепи для обеспечения ограничения по скольжению и опрокидыванию. Страховочные цепи должны быть ненатянутыми, для того чтобы машина могла достигнуть граничного положения и обеспечить защиту от опрокидывания.
Для испытаний может быть использован стенд, имитирующий комплектную машину.
При работе двигателя с максимальной частотой вращения коленчатого вала, рекомендованной изготовителем, подключают требуемый гидроцилиндр(ы) и регистрируют усилие на кромке ковша или используют устройство, регистрирующее изменение скорости дизеля в нагрузочном диапазоне.
Для получения оптимального положения, обеспечивающего максимальное усилие, проводят серию предварительных опытов при установке рукояти и ковша под разными углами друг к другу (т.е. при изменении хода поршня гидроцилиндра). Положение (угол) стрелы, рукояти и ковша в оптимальном положении регистрируют.
4.5 Лимитирующие условия
Для каждого испытания должны быть установлены лимитирующие условия.
В случае достижения уровня ограничения по гидравлике в протоколе испытаний указывают, в каком гидравлическом контуре или в системе было превышено давление настройки предохранительного клапана.
В случае достижения уровня ограничения по опрокидыванию или скольжению усилия измеряют после начала опрокидывания и при срабатывании (натяжении) страховочных цепей. В протоколе указывают условия получения максимального усилия.
4.6 Положения шарниров
Если имеется возможность варьирования положений шарниров стрелы, рукояти, рабочего органа и гидроцилиндров и/или телескопической стрелы, то должны быть зарегистрированы относительные положения пальцев крепления стрелы, рукояти и ковша и/или положение телескопической стрелы при испытаниях.
4.7 Аутригеры
Для машин, оборудованных аутригерами, испытания проводят с поднятыми или опущенными аутригерами в зависимости от указаний изготовителя.
4.8 Процедура измерения
4.8.1 Общие положения
Каждое испытание проводят три раза и регистрируют максимальное значение для каждого опыта. В качестве результата испытаний указывают среднеарифметическое из трех значений.
Усилия измеряют в соответствии с общими требованиями.
Для ковшей с криволинейной или остроконечной формой режущей кромки усилия следует измерять посередине ширины ковша.
Измеряемые усилия должны быть направлены по касательной к дуге перемещения кромки ковша.
Для каждой машины, оборудованной ковшом «обратная лопата», ковшом «прямая лопата» или телескопическим стреловым оборудованием, захватом или грейфером, необходимо определять усилия на рабочем органе.
Там, где требуются усилия, развиваемые цилиндрами ковша и рукояти, измеряют фактические усилия, развиваемые каждым из гидроцилиндров или двумя одновременно.
Фактическое усилие определяют из результатов измерений с учетом изменения показателей, таких как масса рукояти, ковша, грейфера, звеньев, болтов, присоединенных металлических изделий, а также силы трения.
4.8.2 Усилие, развиваемое гидроцилиндром рукояти
4.8.2.1 Оборудование «обратная лопата»
Здесь измеряют усилие, касательное к дуге, которую описывает кромка ковша относительно шарнира рукояти. Измерительное устройство (см. 4.2.1) должно быть расположено таким образом, чтобы оно позволяло воспринимать нагрузку, как это показано на рисунке 1а).
При максимальном усилии давление в гидросистеме должно быть максимальным при положении гидроцилиндра ковша, обеспечивающем максимальный вращающий момент относительно шарнира рукояти.
4.8.2.2 Оборудование «прямая лопата»
Измеряют усилие, касательное к дуге, которую описывает кромка ковша относительно шарнира рукояти. Измерительное устройство должно быть расположено таким образом, чтобы оно позволяло воспринимать нагрузку, как это показано на рисунке 1b).
Кромка ковша должна двигаться по направлению от базовой машины [см. рисунок 1b)].
Положение ковша при максимальном усилии должно соответствовать минимальному расстоянию между кромкой ковша и шарниром рукояти.
Ни одна из частей ковша не должна выходить за наружные пределы дуги, которую описывает кромка ковша относительно шарнира рукояти.
При максимальном усилии давление в гидросистеме должно быть максимальным, а ковш должен находиться в положении, обеспечивающем максимальный вращающий момент относительно шарнира рукояти.
4.8.3 Усилие, развиваемое гидроцилиндром ковша
4.8.3.1 Ковш «обратная лопата» и стреловое оборудование экскаватора (стрела и рукоять)
Для ковша «обратная лопата» измеряют усилие, касательное к дуге, которую описывает кромка ковша относительно шарнира ковша. Измерительное устройство должно быть расположено таким образом, чтобы оно позволяло воспринимать нагрузку, как это показано на рисунке 2а) или на рисунке 3.
Положение ковша должно соответствовать максимальному усилию, создаваемому на нем гидроцилиндром ковша. Ни одна из частей ковша не должна выходить за наружные пределы дуги, которую описывает кромка ковша относительно шарнира ковша.
При максимальном значении усилия, создаваемого гидроцилиндром ковша, давление в гидросистеме должно быть максимальным, а ковш должен находиться в таком положении, при котором обеспечивается максимальный вращающий момент относительно шарнира ковша.
Измерительное устройство и стреловое оборудование экскаватора должны находиться в минимально выдвинутом состоянии, в пределах возможного. Если имеется возможность горизонтальной установки рукояти, то измерительное устройство может быть расположено прямолинейно.
4.8.3.2 Оборудование «прямая лопата»
Измеряют усилие, касательное к дуге, которую описывает кромка ковша относительно шарнира ковша. Измерительное устройство должно быть расположено таким образом, чтобы оно позволяло воспринимать нагрузку, как это показано на рисунке 2b).
При максимальном значении усилия, создаваемого гидроцилиндром ковша, давление в гидросистеме должно быть максимальным, а ковш должен находиться в таком положении, при котором обеспечивается максимальный вращающий момент относительно шарнира ковша.
4.8.4 Усилие, развиваемое гидроцилиндром телескопической стрелы
Усилие следует измерять параллельно линии втягивания стрелы. Измерительное устройство должно быть расположено таким образом, чтобы оно позволяло воспринимать нагрузку.
Кромка ковша должна двигаться по направлению к базовой машине.
Положение ковша должно быть таким, чтобы линия действия усилия была параллельна линии втягивания телескопической стрелы.
При максимальном значении усилия на рабочем органе давление в гидросистеме должно быть максимальным (см. рисунок 3).
4.8.5 Усилие замыкания захвата (грейфера)
Устройство измерения усилия должно быть установлено между режущими кромками или клыками захвата или грейфера, которые должны находиться в положении, обеспечивающем максимальное усилие, которое создается гидроцилиндрами захвата или другими средствами.
Расстояние между режущими кромками должно быть зарегистрировано (см. рисунок 4). Для уменьшения погрешности, устройство измерения усилия (см. 4.2.1) должно быть небольшого размера и обеспечивать измерение касательной нагрузки на режущих кромках или на зубьях.
Максимальное усилие замыкания на захвате или грейфере обеспечивается при максимальном давлении в гидросистеме и при максимальном закрытии захвата или грейфера.
Направление сил замыкания следует определять касательной к дуге, которую описывают режущие кромки или зубья грейфера или захвата.
4.9 Протокол испытаний
В протоколе должны быть указаны:
a) машина:
1) тип,
2) модель,
3) изготовитель,
4) рабочая масса по результатам испытаний,
5) рабочее давление в гидросистеме или максимальное давление настройки предохранительных клапанов, кПа;
b) тип ходового устройства (гусеничной или колесной машины в соответствии с ИСО 6746-1):
1) гусеничная машина
i) тип башмака гусеницы,
ii) максимальная ширина (по гусеницам) W1, м,
iii) колея гусеничного хода W2, м,
iv) ширина башмака гусеницы W4, м,
v) база гусеничного хода (расстояние между вертикальными осевыми линиями передних и задних направляющих или ведущих звездочек) L2, м;
2) колесная машина
i) колея W3, м (указать колею передних и задних колес, если они отличаются друг от друга),
ii) колесная база L3, м,
iii) размер шины (шин),
iv) давление в шине, кПа,
v) балласт (если предусмотрен), кг;
c) рабочее оборудование (в соответствии с ИСО 7135):
1) длина стрелы (и положения шарниров или позиций телескопа), м;
2) длина рукояти (при имеющихся положениях пальцев или телескопического устройства), м,
3) тип ковша, номинальная вместимость (в соответствии с ИСО 7451 или ИСО 7546) и его масса, кг,
4) дополнительное оборудование (указать) и его масса, кг,
5) противовес, кг,
6) аутригеры - ширина по центрам плит выдвинутых аутригеров W6, м.
Усилия на рабочих органах должны быть занесены в таблицу 1. В колонке «лимитирующий фактор» изготовитель должен указать средства блокировки, страховочные цепи и другие устройства, обеспечивающие ограничение движения машины во время испытаний.
Таблица 1 - Результаты испытаний. Максимальные (фактические) усилия на рабочих органах и усилия замыкания
|
Положение пальцев крепления и длина рукояти, м |
Усилие F, Н |
Лимитирующий фактор |
||
|
«Обратная лопата» |
гидроцилиндром рукояти |
|
|
|
|
гидроцилиндром ковша |
|
|
|
|
|
«Прямая лопата» |
гидроцилиндром рукояти |
|
|
|
|
гидроцилиндром ковша |
|
|
|
|
|
Максимальное усилие замыкания захвата (грейфера) |
Расстояние между зубьями/режущими кромками |
|||
|
|
||||
5 Расчетные методы
5.1 Общие положения
Усилие на рабочих органах и усилие замыкания захвата/грейфера следует рассчитывать, исключая массу всех компонентов и эффект трения.
5.2 Номинальные усилия на рабочих органах
5.2.1 Усилие, развиваемое гидроцилиндром рукояти
Рассчитывают усилие, развиваемое гидроцилиндром рукояти, касательное к дуге радиуса А, как показано на рисунке 5а) для оборудования с ковшом «обратная лопата», и как показано на рисунке 5b) для оборудования «прямая лопата».
5.2.2 Усилие, развиваемое гидроцилиндром ковша
Рассчитывают усилие, развиваемое гидроцилиндром ковша, касательное к дуге радиуса В, как показано на рисунке 6 а), b) и с) для оборудования с ковшом «обратная лопата», «прямая лопата» и телескопического стрелового оборудования соответственно.
5.2.3 Усилие, развиваемое гидроцилиндром телескопической стрелы
Рассчитывают усилие на рабочем органе с телескопическим стреловым оборудованием при втягивании стрелы, которое параллельно линии действия, как показано на рисунке 3.
5.2.4 Усилие замыкания захвата (грейфера)
Рассчитывают усилие замыкания захвата (грейфера), которое создается гидроцилиндром замыкания или другими средствами и которое является касательным к дуге радиуса С, как показано на рисунке 7.
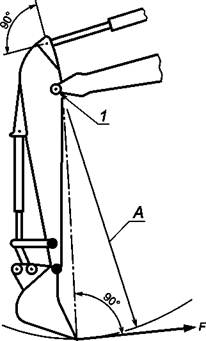
а) Оборудование «обратная лопата»
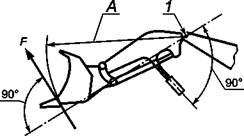
b) Оборудование «прямая лопата»
А- радиус усилия на рукояти, F - усилие, 1 - шарнир рукояти
Рисунок 5 - Расчет усилия, развиваемого гидроцилиндром рукояти (см. 5.2.1)
а) Оборудование «обратная лопата»
b) Оборудование «прямая лопата»
Рисунок 6 - Расчет усилия, развиваемого гидроцилиндром ковша (см. 5.2.2) (лист 1)
с) Телескопическое стреловое оборудование
В - радиус усилия на ковше, F- усилие, 1 - шарнир ковша
Рисунок 6 - (лист 2)
м
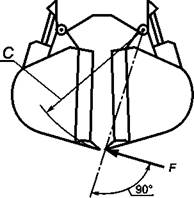
С - радиус усилия на захвате (грейфере), F - усилие замыкания
Рисунок 7 - Рабочий орган захват (грейфер). Расчет усилия замыкания (см. 5.2.4)
6 Корректировка результатов определения усилий на рабочих органах
Значения усилий на рабочих органах и усилий замыкания, полученные расчетным путем, могут быть опубликованы, но предварительно должна быть проведена их корреляция (корректировка) с результатами натурного эксперимента.
Достоверность результатов, полученных расчетным путем, относительно результатов натурного эксперимента может быть не более 95 %. Если изготовитель пользовался материалами расчета, он должен заявить об этом.
Изготовитель должен точно определить положение рукояти и ковша, когда он указывает значение усилий на рабочих органах, таким образом, чтобы каждому усилию соответствовало положение ковша и/или рукояти.
Для машин, на которых используют оборудование «прямая или обратная лопата», должна быть подготовлена информация об изготовителе ковша.
Приложение ДА
(справочное)
Таблица ДА.1
|
Обозначение |
Степень соответствия |
Обозначение и наименование межгосударственного
стандарта, |
|
ИСО 6016:1998 |
- |
* |
|
ИСО 6165:2006 |
IDT |
ГОСТ Р ИСО 6165-2010 «Машины землеройные. Классификация. Термины и определения» |
|
ИСО 6746-1:2003 |
- |
* |
|
ИСО 7135:1993 |
- |
* |
|
ИСО 7451:1997 |
- |
* |
|
ИСО 7546:1983 |
MOD |
ГОСТ 29290-92 (ИСО 7546-83) «Машины землеройные. Ковши погрузчиков и погрузочные ковши экскаваторов. Расчет вместимости» |
|
ИСО 9248:1992 |
- |
* |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированные стандарты. |
||
Ключевые слова: машины землеройные, гидравлический экскаватор, экскаватор-погрузчик, ковш, рукоять, телескопическое оборудование, усилие на рабочем органе