ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р МЭК |

МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ВРАЩАЮЩИЕСЯ
Часть 2-1
Стандартные
методы определения потерь
и коэффициента полезного действия вращающихся
электрических машин
(за исключением машин для подвижного состава)
IEC 60034-2-1:2007
Rotating electrical machines -
Part 2-1: Standard methods for determining losses and efficiency from
tests
(excluding machines for traction vehicles)
(IDT)
|
|
Москва Стандартинформ 2011 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Государственным образовательным учреждением высшего профессионального образования «Московский энергетический институт (технический университет)» (ГОУВПО «МЭИ (ТУ)»)
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 333 «Вращающиеся электрические машины»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 декабря 2009 г. № 638-ст.
4 ВВЕДЕН ВПЕРВЫЕ
Настоящий стандарт является идентичным международному стандарту МЭК 60034-2-1:2007 «Машины электрические вращающиеся. Часть 2-1. Методы определения потерь и коэффициента полезного действия по результатам испытаний (кроме машин для тягового транспорта)» (IEC 60034-2-1 Rotating electrical machines - Part 2-1: Standard methods for determining losses and efficiency from tests (excluding machines for traction vehicles)).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в обязательном приложении ДА.
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ ВРАЩАЮЩИЕСЯ
Часть 2-1
Стандартные
методы определения потерь и коэффициента полезного действия вращающихся
электрических машин (за исключением машин для подвижного состава)
Rotating electrical machines. Part 2-1. Standard methods for determining losses and efficiency
from tests (excluding
machines for traction vehicles)
Дата введения - 2011-01-01
1 Область применения
Настоящий стандарт устанавливает методы испытаний для определения потерь и коэффициента полезного действия машин электрических (далее - машин). Стандарт распространяется на машины постоянного тока, синхронные и асинхронные всех типоразмеров в рамках МЭК 60034-1.
Примечание - Данные методы могут быть применены к другим типам машин, таким как электромашинные преобразователи, коллекторные двигатели и однофазные асинхронные двигатели.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты:
МЭК 60027-1:1992 Обозначения буквенные, применяемые в электротехнике. Часть 1. Основные положения
МЭК 60034-2А:1974 Машины электрические вращающиеся. Часть 2. Методы определения потерь и коэффициента полезного действия вращающихся электрических машин (за исключением машин для подвижного состава). 1-е дополнение: Измерение потерь калориметрическим методом
МЭК 60034-4:2008 Машины электрические вращающиеся. Часть 4. Методы экспериментального определения параметров синхронных машин
МЭК 60034-19:1995 Машины электрические вращающиеся. Часть 19. Специальные методы испытаний для машин постоянного тока с обычной подачей электропитания и через выпрямитель
МЭК 60034-29:2008 Машины электрические вращающиеся. Часть 29. Эквивалентные методы нагрузки и наложения. Косвенное определение повышения температуры
МЭК 60044 (части 1 - 8) Трансформаторы измерительные
МЭК 60051-1:1997 Приборы аналоговые, электроизмерительные, показывающие, прямого действия и части к ним. Часть 1. Определения и основные требования, общие для всех частей
3 Термины и определения
В настоящем стандарте применены термины с соответствующими определениями, установленными в МЭК 60034-1, МЭК 60051-1.
3.1 коэффициент полезного действия (КПД): Отношение выраженных в одинаковых единицах выходной мощности к входной, обычно выражаемое в процентах.
3.2 Испытания для прямого измерения КПД
3.2.1 общее определение: Испытания, при которых КПД определяется методами прямых измерений входной и выходной мощности.
3.2.3 динамометрическое испытание: Испытание в соответствии с 3.2.2 при измерении вращающего момента посредством динамометра.
3.2.4 испытание при двойном питании с двухмашинным агрегатом: Испытание, при котором две идентичные машины соединены механически и суммарная мощность потерь обеих машин измеряется как разность между электрической мощностью на входе одной из машин и электрической мощностью на выходе другой.
3.3 Испытания для косвенного определения КПД
3.3.1 общее определение: Испытание, при котором КПД определяется косвенно путем измерения входной или выходной мощности и мощности потерь. Мощность потерь добавляется к выходной мощности, чтобы получить входную, или вычитается из входной мощности для определения выходной.
3.3.2 испытание с двухмашинным агрегатом при питании от одной сети: Испытание, при котором две идентичные машины соединены механически и питаются от одного источника. Сумма потерь обеих машин равна мощности, суммарно потребляемой от источника питания.
3.3.3 испытание без нагрузки: Испытание, при котором машина в двигательном режиме работает на холостом ходу (без нагрузки на валу) или в генераторном режиме с разомкнутыми выходными клеммами.
3.3.4 испытание с нулевым коэффициентом мощности (синхронные машины): Испытание перевозбужденной синхронной машины без нагрузки на валу, которая работает с близким к нулю коэффициентом мощности.
3.3.5 метод схемы замещения (асинхронные машины): Испытание, при котором потери определены с помощью эквивалентной схемы замещения.
3.3.6 испытание с вынутым ротором и обратным вращением (асинхронные машины): Комплексное испытание, при котором потери определены сначала при испытании с вынутым ротором, а затем при испытании с ротором, вращающимся в направлении, противоположном полю.
3.3.7 испытание коротким замыканием (синхронные машины): Испытание, при котором машина работает как генератор с короткозамкнутыми выходными клеммами.
3.3.8 испытание с заторможенным ротором: Испытание, при котором ротор заблокирован и не вращается.
3.3.9 испытание по схеме «звезда»: Испытание при питании несимметричным напряжением обмотки статора, соединенной в звезду.
3.4 Потери
3.4.1 суммарные потери РТ: Потери, представляющие собой разницу между входной и выходной мощностью, равную сумме постоянных (см. 3.4.2) и переменных потерь (см. 3.4.4), дополнительных переменных потерь (см. 3.4.5), а также потерь в цепи возбуждения (см. 3.4.3).
3.4.2 Постоянные потери
3.4.2.1 постоянные потери Рс: Сумма потерь в стали, трения и вентиляционных потерь.
3.4.2.2 потери в стали Pfe: Потери в активных частях стали и дополнительные потери холостого хода в других металлических деталях.
3.4.2.3 Трение и вентиляционные потери Pfw
3.4.2.3.1 потери трения: Потери на трение в подшипниках и щеточно-коллекторном узле (если они не зависят от скорости), исключая любые потери в независимой системе смазки. Потери в подшипниках должны быть установлены отдельно, независимо от того, поставляются ли они с машиной. Потери в подшипниках зависят от их рабочей температуры, типа масла и его температуры.
Примечание 1 - Когда имеются потери в независимой системе смазки, они должны быть учтены отдельно.
Для вертикальных машин потери в упорных подшипниках должны быть определены без учета внешних осевых нагрузок.
Примечание 2 - Дополнительные потери от внешней осевой нагрузки могут быть определены отдельным соглашением, которое должно включать величину осевой нагрузки, температуру подшипников, тип масла и его температуру.
Примечание 3 - Потери трения от осевой нагрузки могут быть определены отдельным соглашением.
Если в испытуемой машине используется прямое охлаждение подшипников, потери распределяются между данной машиной и другой, соединенной с ней механически, например турбиной, пропорционально массам их вращающихся деталей. Если нет прямого охлаждения, то распределение потерь должно быть определено эмпирическими формулами по отдельному соглашению.
3.4.2.3.2 вентиляционные потери: Суммарные потери от аэродинамического трения во всех частях машины, включая энергию, потребляемую вентиляторами, установленными на валу, и двигателями независимой вентиляции, установленными на машине.
Примечание 1 - Потери в независимой вентиляционной системе должны быть приведены отдельно.
Примечание 2 - Для машин, косвенно или непосредственно охлаждаемых водородом, см. МЭК 60034-1.
3.4.3 Потери в цепи возбуждения
3.4.3.1 потери в цепи возбуждения Ре: Сумма потерь в обмотке возбуждения (см. 3.4.3.2), потерь в возбудителе (см. 3.4.3.3) и для синхронных машин электрические потери щеточного узла (см. 3.4.3.5), если они есть.
3.4.3.2 потери в обмотке возбуждения Pf: Потери, равные произведению тока возбуждения Iе на напряжение возбуждения Ue.
3.4.3.3 потери в возбудителе PEd: Потери, определяющиеся для различных систем возбуждения следующим образом:
а) возбудитель на валу машины
Потери в возбудителе - мощность, потребляемая валом возбудителя (за вычетом потерь на трение и сопротивление воздуха), плюс мощность Р1Е, потребляемая возбудителем от независимого источника, минус полезная мощность, которую возбудитель обеспечивает на своих выходных клеммах. Полезная мощность на выходных клеммах возбудителя равна потерям в обмотках возбуждения питаемой им машины согласно 3.4.3.2 в сумме (в случае синхронной машины) с электрическими потерями в щеточном узле согласно 3.4.3.5.
Если возбудитель может быть отсоединен и испытан отдельно, то его потери могут быть определены в соответствии с 5.3.
Если возбудитель использует отдельные вспомогательные источники питания, то их потребляемая мощность должна быть включена в потери возбудителя, если только она не учтена уже в потреблении основной машины;
б) бесщеточный возбудитель
Потери, равные мощности, потребляемой валом возбудителя, за вычетом потерь на трение и сопротивление воздуха (если соответствующее испытание проведено на соединенной с возбудителем машине) плюс мощность Р1Е, потребляемая от независимого источника обмоткой возбуждения возбудителя или статора, если возбудитель - асинхронная машина, минус полезная мощность, которую возбудитель обеспечивает на своих выходных клеммах.
Во всех случаях, когда возбудитель использует отдельные вспомогательные источники питания, их потребляемая мощность должна быть включена в потери возбудителя, если только она не учтена уже в потреблении основной машины.
Если возбудитель может быть отсоединен и испытан отдельно, то его потери могут быть определены в соответствии с 5.3;
в) независимый электромашинный возбудитель
Потери в возбудителе - разница между суммарной мощностью, потребляемой приводным двигателем, всеми вспомогательными источниками питания приводного двигателя и возбудителя, и полезной мощностью возбуждения согласно 3.4.3.2 и 3.4.3.4. Потери возбудителя могут быть определены согласно 5.3;
г) статическая система возбуждения (статический возбудитель)
Потери системы возбуждения - разница между суммарной мощностью, потребляемой от основного и вспомогательных источников системы возбуждения, и мощностью, подаваемой на возбуждение, согласно 3.4.3.2 и 3.4.3.4.
При питании системы возбуждения от трансформатора его потери также должны быть учтены;
д) возбуждение с помощью дополнительной обмотки (самовозбуждение)
Потери в цепи возбуждения - потери в меди вспомогательной (вторичной) обмотки и дополнительные потери в стали, производимые высшими гармониками потока. Дополнительные потери в стали определяются как разница между потерями, возникающими при нагруженной и ненагруженной вспомогательной обмотке.
Ввиду сложности разделения составляющих потерь возбуждения рекомендуется рассматривать их как часть потерь в статоре при определении суммарных потерь.
В случаях в) и г) необходимо учитывать потери в источнике питания цепи возбуждения, в соединениях между источником и щетками (для синхронной машины) или между источником и клеммами обмотки возбуждения (для машины постоянного тока).
Если система возбуждения содержит компоненты, перечисленные в случаях б) - д), потери возбуждения будут включать составляющие, представленные в приложении В.
3.4.3.4 мощность возбуждения от независимого источника Р1Е: Мощность, передаваемая от независимого источника энергии и представляющая собой:
- для возбудителей типов а) и б) - мощность возбудителя (сеть постоянного тока или синхронный возбудитель) или мощность на статорной обмотке (индукционный возбудитель). Она составляет часть потерь возбудителя PEd (и добавочных потерь в индукционном возбудителе), в то время как большая часть Ре проходит через вал;
- для возбудителей типов в) и г) - потери в цепи возбуждения, Р1Е = Ре;
- для возбудителя типа д) - Р1Е = 0, мощность возбуждения проходит полностью через вал; для машин с возбуждением от постоянного магнита Р1Е = 0.
Типы возбудителя должны соответствовать 3.4.3.3.
3.4.3.5 щеточные потери Рb (в цепи возбуждения): Электрические потери в щетках (включая потери в контакте) синхронных машин с независимым возбуждением.
3.4.4 Потери нагрузки
3.4.4.1 потери от нагрузки Р: Сумма потерь (I2R) в обмотках (см. 3.4.4.2) и щеточных потерь (см. 3.4.4.3), если они есть.
3.4.4.2 потери в обмотках: Тепловые потери в активных сопротивлениях обмоток, равные I2R. Для различных типов машин эти потери распределены:
- в якорной обмотке машины постоянного тока;
- в статорных и роторных обмотках асинхронных машин;
- в статорных обмотках синхронных машин.
3.4.4.3 щеточные потери Рb (в цепи нагрузки): Потери в щеточном узле (включая потери в контакте) в якорной цепи машин постоянного тока и в асинхронных машинах с фазным ротором.
3.4.5 добавочные потери под нагрузкой PLL: Потери в стали и конструктивных металлических частях, вызванные током нагрузки; потери от вихревых токов в обмоточных проводах, вызванные зависящими от тока нагрузки пульсациями потока, а также добавочные потери в щеточном узле, вызванные коммутацией.
Примечание - Добавочные потери под нагрузкой не включают добавочные потери на холостом ходу по 3.4.2.2.
3.4.6 потери короткого замыкания Psc: Потери в синхронной машине и в машине постоянного тока при короткозамкнутой якорной обмотке, зависящие от тока.
3.5 Экспериментальные параметры (для многофазных машин переменного тока)
3.5.1 линейное напряжение: среднее арифметическое значение линейных напряжений.
3.5.2 линейный ток: среднее арифметическое значение линейных токов.
3.5.3 линейное сопротивление: среднее арифметическое сопротивлений между всеми клеммами фаз питания.
Примечание 1 - Для трехфазных машин при соединении в звезду сопротивление фазы равно половине линейного сопротивления. Для соединения в треугольник сопротивление фазы равно полутора линейного сопротивления.
Примечание 2 - В разделах 7, 8 и 9 пояснения и уравнения приведены для машин с тремя фазами, если иное не оговорено.
4 Символы и обозначения
4.1 Символы
cos φ - коэффициент мощности1;
_____________
1 Определение справедливо при синусоидальных токе и напряжении.
f - частота питающей сети, Гц;
I - средний линейный ток, А;
kθ - температурный коэффициент;
n - частота вращения, об/мин;
p - число пар полюсов;
P - мощность, Вт;
Р0 - потребляемая мощность на холостом ходу, Вт;
Р1 - потребляемая мощность, без учета возбуждения2, Вт;
_____________
2 В данном документе при испытаниях двигателя под Р1 и Р2 подразумеваются потребляемая мощность и выходная мощность соответственно, если не оговорено иное.
Р2 - выходная мощность, Вт;
Рb - щеточные потери, Вт;
Ре - потери в цепи возбуждения, Вт;
Р1Е - мощность цепи возбуждения, питаемой от отдельного источника, Вт;
PEd - потери в возбудителе, Вт;
Реl - электрическая мощность без учета возбуждения, Вт;
Pf - потери в обмотках возбуждения, Вт;
Pfe - потери в стали, Вт;
Рfw - потери на трение и охлаждение, Вт;
Рс - постоянные потери, Вт;
PL - потери от нагрузки, Вт;
PLr - остаточные потери, Вт;
PLL - дополнительные потери от нагрузки, Вт;
Pmech - механическая мощность, Вт;
Psc - потери короткого замыкания, Вт;
РТ - суммарные потери, Вт;
Pw - потери в обмотках, Вт, при этом подстрочный индекс w обычно заменяется на a, f, e, s или r;
R - сопротивление обмоток, Ом;
Reh - фактическое значение дополнительного резистора, используемого в испытании по схеме «звезда» (см. 6.4.5.5), Ом;
R'eh - расчетное значение добавочного резистора, Ом;
Rf - сопротивление обмотки возбуждения, Ом;
R11 - среднее значение линейного сопротивления, Ом;
Rph - среднее значение фазного сопротивления, Ом;
s - скольжение;
Т - вращающий момент машины, Н ∙ м;
Td - измеренное значение вращающего момента, Н ∙ м;
Тс - поправка вращающего момента, Н ∙ м;
U - среднее значение напряжения на зажимах, В;
U0 - напряжение на зажимах без нагрузки, В;
UN - номинальное напряжение на зажимах, В;
X - реактивное сопротивление, Ом;
![]() -
полное (комплексное) сопротивление;
-
полное (комплексное) сопротивление;
Z - полное сопротивление, Ом;
η - коэффициент полезного действия;
θ0 - исходная температура обмотки, °С;
θа - температура окружающей среды, °С;
θc - начальная температура охлаждающей среды, °С;
θw - температура обмотки, °С;
τ - постоянная времени, с.
4.2 Дополнительные обозначения
Следующие обозначения могут быть добавлены к символам для уточнения режима работы машины и назначения символов.
Компоненты машины:
а - якорь;
е - возбуждение;
f - обмотка возбуждения;
r - ротор;
s - статор;
w - обмотка;
U, V, W - фазные значения.
Типы машин:
В - стартер, вспомогательный машинный агрегат;
D - динамометр;
Е - возбудитель;
G - генератор;
М - двигатель.
Условия эксплуатации:
0 - без нагрузки;
1 - вход;
2 - выход;
av - среднее значение;
d - рассеиваемый;
el - электрический;
i - внутренний;
L - испытательная нагрузка;
Lr - заторможенный ротор;
mech - механическое;
N - номинальный;
red - при пониженном напряжении;
t - испытательный;
zpf - испытание с нулевым коэффициентом мощности;
θ - приведенный к ссылочной температуре охлаждающей среды.
Примечание - Встречающиеся впоследствии дополнительные обозначения разъясняются в соответствующих подпунктах.
5 Общие требования
5.1 Прямое и косвенное измерение КПД
Испытания с целью определения КПД могут быть сгруппированы по трем категориям:
а) испытание одной машины, подразумевающее измерение электрической (на клеммах) или механической (на валу) мощности на входе и механической или электрической мощности на выходе машины;
б) измерение электрической мощности на входе и выходе двух механически связанных идентичных машин, что позволяет устранить измерение механической мощности;
в) измерение фактических потерь в машине в специально организованных режимах; обычно при этом измеряются различные компоненты потерь, а затем вычисляются суммарные.
Определение суммарных потерь может быть выполнено одним из следующих методов:
- измерение суммарных потерь;
- определение составляющих потерь и дальнейшее их суммирование.
Примечание - Методы определения КПД машин базируются на ряде допущений, поэтому не следует сравнивать значения КПД, полученные различными методами.
5.2 Погрешности
Погрешности в данном стандарте имеют отношение к определению истинной величины КПД. Они отражают влияние процедуры испытаний и испытательного оборудования на результат.
Для определения погрешности в численном виде требуются соответствующие испытания, полученные результаты должны быть представительны и сопоставимы. В данном стандарте используются следующие, относящиеся к погрешности, термины:
- «низкая погрешность» - относится к определению КПД, основанному исключительно на результатах испытаний;
- «средняя погрешность» - относится к определению КПД, основанному на ограниченных приближениях;
- «высокая погрешность» - относится к определению КПД, основанному на существенных допущениях.
5.3 Предпочтительные методы
Выбор метода испытания для определения КПД зависит от требуемой точности, типа и размера испытуемой машины, доступного испытательного оборудования (питание, нагружающий или приводной двигатель).
В таблицах 1 - 3 приведены предпочтительные методы для разных типов машин. Выбираемый метод должен обладать наименьшей погрешностью.
Таблица 1 - Машины постоянного тока
|
Раздел |
Рекомендуемое применение |
Необходимая аппаратура |
Погрешность |
|
|
Прямой метод измерения |
||||
|
Испытание методом тарированной машины |
Тарированная машина |
См. примечание 3 |
||
|
Прямое измерение вращающего момента |
Высота оси Н ≤ 180 мм |
Измеритель момента или динамометр на полную нагрузку |
Низкая |
|
|
Метод суммарных потерь |
||||
|
Испытание в двухмашинном агрегате при питании от одной сети |
Две одинаковые машины. Вольтодобавочный генератор |
Низкая |
||
|
Метод суммирования составляющих потерь с испытанием под нагрузкой |
||||
|
Измерение PLL в двухмашинном агрегате при питании от одной сети |
Две одинаковые машины. Вольтодобавочный генератор |
Низкая |
||
|
Приближенная оценка PLL по мощности |
Средняя |
|||
|
Измерение PLL при питании машины в схеме со специальным выпрямителем |
Высота оси Н > 180 мм |
Специальный выпрямитель |
Средняя |
|
|
Метод суммирования составляющих потерь без испытания под нагрузкой |
||||
|
Потери на возбуждение определяются в зависимости от тока возбуждения под нагрузкой и на холостом ходу. Приближенная оценка PLL по мощности |
Если отсутствует оборудование для испытаний под нагрузкой |
Высокая |
||
|
Примечание 1 - Применение прямого метода измерений из-за инструментальной погрешности ограничено величиной КПД 95 % - 96 %. Данный стандарт рекомендует прямые методы испытания для машин с высотой вала 180 мм, так как они обычно не превышают 95 %-ный уровень. Машины большего размера, имеющие КПД ниже 95 % - 96 %, могут также быть проверены прямым методом испытаний. Примечание 2 - В графе «Погрешность» термин «Низкая» соответствует процедуре, определяющей все компоненты потерь путем испытаний; «Средняя» - процедуре, которая основана на упрощенной физической модели машины; «Высокая» - процедуре, которая определяет не все компоненты потерь путем испытаний. Примечание 3 - Необходимо определение погрешности. |
||||
Таблица 2 - Асинхронные машины
|
Метод |
Раздел |
Рекомендуемое применение |
Необходимая аппаратура |
Погрешность |
|
Прямой метод измерения |
||||
|
Прямое измерение вращающего момента |
Все однофазные и многофазные машины до 1 кВт |
Измеритель момента или динамометр на полную нагрузку |
Низкая |
|
|
Испытание методом тарированной машины |
Приложение Г |
Тарированная машина |
См. примечание 4 |
|
|
Испытание в двухмашинном агрегате при питании от двух сетей |
Две одинаковые машины на полную нагрузку |
Низкая |
||
|
Метод суммарных потерь |
||||
|
Калориметрический метод |
Приложение Г |
Специальная термокамера |
См. примечание 4 |
|
|
Испытание в двухмашинном агрегате при питании от одной сети |
Две одинаковые машины (фазный ротор) |
Низкая |
||
|
Метод суммирования составляющих потерь с испытанием под нагрузкой и без нее |
||||
|
PLL, определяемое из остаточных потерь |
Трехфазные машины от 1 до 150 кВт |
Динамометр/измеритель момента на 1,25 полной нагрузки |
Низкая |
|
|
Назначенное значение PLL по мощности |
От средней до высокой |
|||
|
PLL, определяемое при испытании с вынутым ротором и обратным вращением |
Вспомогательный двигатель мощностью не более 5-кратных общих потерь РТ |
Высокая |
||
|
PLL, определяемое при испытании в схеме «звезда» |
См. примечание 3 |
Резистор на 150 % номинального фазового тока |
Средняя |
|
|
Метод суммирования составляющих потерь без испытания под нагрузкой |
||||
|
Токи мощности и скольжение определяются по методу схемы замещения. Назначенное значение PLL по мощности |
Если отсутствует оборудование (нет возможности приложить нагрузку и нет второй машины эквивалентной мощности) |
Средняя/высокая |
||
|
Примечание 1 - Из-за погрешностей измерения определение PLL методом остаточных потерь ограничено коэффициентами корреляции (см. 8.2.2.5.1.2), большими, чем 0,95, и погрешность измерения КПД может превысить ±0,5 %. Примечание 2 - В графе «Погрешность» термин «Низкая» соответствует процедуре, определяющей все компоненты потерь путем испытаний; «Средняя» - процедуре, которая основана на упрощенной физической модели машины; «Высокая» - процедуре, которая определяет не все компоненты потерь путем испытаний. Примечание 3 - Данный метод применяется для двигателей мощностью от 1 до 150 кВт; применение еще больших мощностей - на рассмотрение. Метод предусматривает соединение обмотки по схеме «звезда». Примечание 4 - Необходимо определение погрешности. |
||||
Таблица 3 - Синхронные машины
|
Раздел |
Рекомендуемое применение |
Необходимая аппаратура |
Погрешность |
|
|
Прямой метод измерения |
||||
|
Прямое измерение вращающего момента |
Высота оси Н ≤ 180 мм |
Измеритель момента или динамометр на полную нагрузку |
Низкая |
|
|
Испытание методом тарированной машины |
Приложение Г |
Тарированная машина |
См. примечание 3 |
|
|
Испытание в двухмашинном агрегате при питании от двух сетей |
Две одинаковые машины на полную нагрузку |
Низкая |
||
|
Метод суммарных потерь |
||||
|
Калориметрический метод |
Приложение Г |
Специальная термокамера |
См. примечание 3 |
|
|
Испытание в двухмашинном агрегате при питании от одной сети |
Две идентичные машины |
Низкая |
||
|
Испытание с нулевым коэффициентом мощности и током возбуждения по диаграмме Потье/ASA/Шведской |
Источник питания на полное напряжение и ток |
Средняя |
||
|
Метод суммирования составляющих потерь с испытанием под нагрузкой |
||||
|
Суммирование за исключением PLL |
Двухмашинный агрегат на полную нагрузку |
Высокая |
||
|
PLL из испытания при коротком замыкании |
Высота оси Н > 180 мм |
Низкая |
||
|
Метод суммирования составляющих потерь с испытанием без нагрузки |
||||
|
Ток возбуждения по диаграмме Потье/ASA/Шведской |
Если отсутствует оборудование (нет возможности приложить нагрузку и нет второй машины эквивалентной мощности) |
Средняя |
||
|
PLL из испытания при коротком замыкании |
||||
|
Примечание 1 - Из-за инструментальной погрешности прямой метод испытаний ограничен измеряемой величиной КПД до 95 % - 96 %. Данный стандарт рекомендует прямые методы измерений для машин с высотой вала до 180 мм, так как они вряд ли превзойдут 95 %-ный уровень КПД. Машины большего размера и КПД ниже 95 % - 96 % могут также быть успешно испытаны с применением прямого метода измерений. Примечание 2 - В графе «Погрешность» термин «Низкая» соответствует процедуре, определяющей все компоненты потерь путем испытаний; «Средняя» - процедуре, которая основана на упрощенной физической модели машины; «Высокая» - процедуре, которая определяет не все компоненты потерь путем испытаний. Примечание 3 - Необходимо определение погрешности. Примечание 4 - В данной таблице Н - высота оси (расстояние от геометрической оси вала до основания лап) в миллиметрах (предпочтительные числа приведены в МЭК 60072-1). |
||||
5.4 Питание
5.4.1 Напряжение
Напряжение должно соответствовать 7.2 (и 8.3.1 для тепловых испытаний) по МЭК 60034-1.
5.4.2 Частота
Частота во время измерений должна находиться в пределах ±0,3 % от номинального значения.
Примечание - Это требование не применяется при использовании метода эквивалентной схемы (6.4.4.4).
5.5 Средства измерений
5.5.1 Общие сведения
Поскольку точность измерительных приборов обычно выражается в процентах от максимального деления шкалы, диапазон измерений прибора желательно выбирать наименьшим из практически возможных.
Примечание - Показания аналоговых приборов должны находиться в верхней трети шкалы измерения.
5.5.2 Приборы для измерения электрических величин
Измерительные приборы должны иметь класс точности 0,2 (точность ±0,2 %) в соответствии с МЭК 60051.
Примечание - При типовых испытаниях в соответствии с МЭК 60034-1, п. 9.1, достаточен класс точности 0,5. Если иное не указано в настоящем стандарте, должно использоваться среднее арифметическое значение трех измеренных значений линейных токов или напряжений.
5.5.3 Измерительные трансформаторы
Измерительные трансформаторы согласно МЭК 60044-1 должны иметь такой класс точности, чтобы их ошибки при испытаниях методом суммирования потерь с дополнительным определением потерь от нагрузки в соответствии с 8.2.2.5.1 не превышали ±0,5 % или ±0,3 % - для асинхронных машин.
5.5.4 Измерения вращающего момента
Приборы для измерения вращающего момента должны иметь класс точности 0,2. Если вращающий момент на валу измеряется посредством динамометра, необходимо провести измерение момента потерь. Это также следует сделать, если какой-нибудь подшипниковый узел или муфта размещены между валом двигателя и прибором, измеряющим момент.
Вращающий момент T на валу машины рассчитывается по формуле
T = Td + Tc, (1)
где Td - результат измерения вращающего момента;
Тс - момент потерь в соответствии с приложением А.
5.5.5 Измерение частоты вращения и скорости
Инструменты для измерения частоты должны иметь класс точности 0,1. Измерение частоты вращения должно быть проведено с точностью не хуже ±0,1 % или ±1 об/мин в зависимости от того, что дает наименьшую ошибку.
Примечание 1 - Частота вращения n, измеренная в об/мин, связана с угловой скоростью ω, измеряемой в рад/с или с-1, соотношением n = 60ω/2π.
Примечание 2 - Измерение скольжения подходящим методом может заменить измерение частоты вращения или угловой скорости.
5.5.6 Измерение температуры
Приборы для измерения температуры обмотки должны иметь точность не хуже ±1 °С.
5.6 Единицы измерения величин
Если иное не указано, единицы измерения величин указываются в системе СИ, что соответствует МЭК 60027-1.
5.7 Сопротивления
5.7.1 Измеряемое сопротивление
Сопротивление обмотки R измеряется в Ом и определяется соответствующими методами.
Для машин постоянного тока R - полное сопротивление всех обмоток, по которым протекает якорный ток (якорная обмотка, коллекторный узел, компенсационная обмотка, смешанная обмотка возбуждения). Если измерение сопротивления затруднительно из-за его очень низких значений, допустимо его вычисление.
Для машин постоянного тока и синхронных машин Rf - сопротивление цепи возбуждения.
Для многофазных машин переменного тока R = R11 - сопротивлению между фазами статора или якоря (для синхронных машин) согласно 3.5.3. Для асинхронных машин с фазным ротором Rr,11 - сопротивление между фазами ротора. Измеряемое сопротивление в конце испытания на нагрев должно быть определено по МЭК 60034-1. Испытательная температура обмотки должна быть определена согласно 5.7.2.
Если сопротивление обмотки (под нагрузкой) не может быть измерено прямым методом, величина сопротивления должна быть рассчитана по измеренному сопротивлению в холодном состоянии и разнице между температурой при этом измерении и температурой, полученной согласно 5.7.2, а) - д).
5.7.2 Температура обмотки
Измеряемая температура обмотки должна быть определена одним из следующих методов, перечисленных в порядке предпочтения:
а) температура определяется при номинальной нагрузке методом сопротивления по величине RN в соответствии с процедурой экстраполяции, описанной в 5.7.1;
б) температура определяется непосредственно электронным термометром или термопарой;
в) температура определяется согласно а) на другой машине аналогичного типа и конструкции;
г) в случае, если невозможно обеспечить нагрузку, температуру определяют согласно МЭК 61986;
д) если сопротивление под нагрузкой RN не может быть измерено непосредственно, температура обмотки должна быть принята равной нормативной температуре для соответствующего класса нагревостойкости в соответствии с таблицей 4.
Таблица 4 - Нормативная температура
|
Нормативная температура, °С |
|
|
130 (В) |
95 |
|
155 (F) |
115 |
|
180 (Н) |
135 |
Если номинальное превышение температуры или номинальная температура будут заявлены для более низкого класса изоляции, чем используется в двигателе, то нормативная температура должна соответствовать заявленному классу.
5.7.3 Приведение к температуре охлаждающей среды
Значения сопротивления обмотки, измеренные при испытании, должны быть приведены к нормативной температуре 25 °С. Коэффициент приведения сопротивления обмотки (а также скольжения в случае асинхронных машин) к нормативной температуре 25 °С может быть рассчитан по формуле
![]() (2)
(2)
где kθ - температурный коэффициент приведения для обмотки;
θw - температура обмотки согласно 5.7.2;
θc - температура охлаждающей среды на входе во время испытания;
235 - температурная постоянная.
Примечание - Температурная постоянная «235» для медной обмотки должна быть заменена на «225» для алюминиевой обмотки.
Для машин, в которых в качестве первичного или вторичного хладагента используется вода, нормативная температура должна быть принята 25 °С, что согласуется с МЭК 60034-1. Другие значения могут быть определены дополнительным соглашением.
6 Методы испытаний для определения КПД
6.1 Установка машины и процедура испытаний
Испытания должны проводиться на собранной машине, установленной и укомплектованной таким образом, чтобы обеспечить условия, наиболее приближенные к нормальным условиям эксплуатации.
Примечание 1 - Рекомендуется, чтобы машина была выбрана случайным образом из серийной продукции.
Примечание 2 - Уплотняющие элементы могут быть устранены в ходе испытаний, если дополнительные испытания на машинах аналогичной конструкции показали, что трение остается незначительным после достаточно длительной работы.
Процедура испытаний должна состоять из операций, выполняемых в определенной последовательности. Нет необходимости выполнять данные операции немедленно одна за другой. Однако если они будут выполнены с задержкой или по отдельности, то необходимо предварительно обеспечить требуемые тепловые условия испытаний.
На машинах с регулируемым щеточным узлом щетки должны быть установлены в положение, соответствующее технической документации. На асинхронных двигателях с фазным ротором, имеющих подъемный щеточный механизм, щетки во время испытания должны быть подняты, а обмотка ротора замкнута накоротко. Для измерений на машинах постоянного тока без нагрузки щетки должны быть расположены на нейтральной оси.
6.2 Измерения в цепи возбуждения
Способ измерения напряжения Ue и тока Iе (см. 3.4.3.2) зависит от конфигурации системы возбуждения (см. 3.4.3.3). Там, где это применимо, данные испытаний должны быть получены в соответствии со следующими указаниями.
а) для машин с возбудителями на валу, независимыми электромашинными возбудителями, статическим возбудителем и с самовозбуждением (см. 3.4.3.3 а), в), г) и д)), напряжение Ue и ток Iе измеряются:
- на клеммах обмотки возбуждения машин постоянного тока;
- в области контактных колец обмоток синхронных машин.
б) для машин с бесщеточными возбудителями (см. 3.4.3.3,б)) применимы следующие способы:
- измеряется напряжение Ue на контактных (предварительных) кольцах вспомогательного возбудителя, подключенных к клеммам обмотки возбуждения; по напряжению Ue и сопротивлению Re ток, текущий в обмотке, рассчитывается по формуле
![]() (3)
(3)
где Uf - напряжение, приложенное к обмотке возбуждения;
Rf - сопротивление цепи обмотки возбуждения.
Сопротивление обмотки возбуждения измеряется после выключения машины с использованием процедуры экстраполяции в соответствии с 5.7.1;
- измеряются напряжение Ue и ток Iе с помощью силовых контактных колец, подходящих для непосредственного измерения тока, протекающего по обмотке возбуждения.
Примечание - Разница между Ue и Uf (падение напряжения) на практике почти незначительна.
Напряжения и токи должны измеряться при постоянной температуре.
Потери в цепи возбуждения Ре определяются в соответствии с 7.2.2.5 (машины постоянного тока) или 9.2.2.4 (синхронные машины).
6.3 Прямые измерения
6.3.1 Измерение вращающего момента
В данном разделе приведены методы испытаний, при которых механическая мощность Pmech машины определяется из измеренных величин вращающего момента на валу и скорости. Одновременно измеряется электрическая мощность Рel (в статоре машин переменного тока или якоре машин постоянного тока).
Входными и выходными мощностями являются:
при работе в режиме двигателя Р1 = Реl; Р2 = Pmech (см рис. 1);
при работе в режиме генератора Р1 = Pmech; P2 = Реl.
Примечание - Для получения более точных результатов рекомендуется провести несколько измерений всех величин при каждой нагрузке в течение короткого промежутка времен, а в качестве результата использовать их средние значения.
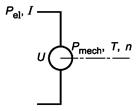
Рисунок 1 - Схема измерения момента
6.3.1.2 Испытание с помощью измерителя вращающего момента
При испытании двигатель соединяется с нагрузочной машиной или генератор с приводным двигателем через измеритель вращающего момента. К испытуемой машине прикладывается требуемая нагрузка.
При каждом испытании регистрируются значения:
U, I, Реl, n, Т, θc - напряжения, тока, электрической мощности, частоты вращения, вращающего момента и начальной температуры охлаждающей среды.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.3.1.3 Испытание с помощью динамометра
Испытуемая машина соединяется с динамометром, который калибруется таким образом, чтобы его показание было равно нулю, когда вращающий момент вала также равен нулю (см. 5.5.3). К испытуемой машине прикладывается требуемая нагрузка.
При каждом испытании регистрируются значения:
U, I, Реl, n, Т, θc - напряжения, тока, электрической мощности, частоты вращения, вращающего момента и начальной температуры охлаждающей среды.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.3.2 Испытания с двухмашинным агрегатом
6.3.2.1 Общие сведения
Две одинаковые машины соединяются механически, как показано на рисунке 2.
Питание машин при испытании можно менять, однако приборы и измерительные преобразователи должны оставаться в цепи одной и той же машины.
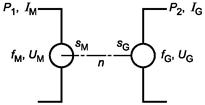
Рисунок 2 - Схема испытания с двухмашинным агрегатом (для синхронных машин IM = IG, fM = fG)
6.3.2.2 Асинхронные машины
Клеммы питания испытуемого асинхронного двигателя (или генератора) подключаются к электромашинному или полупроводниковому преобразователю с низкими гармоническими искажениями, способному поставлять реактивную мощность и поглощать активную. Питание испытуемой машины производится номинальным напряжением и частотой; вторая машина должна питаться более низкой частотой для работы в генераторном режиме (испытуемая - в двигательном) или более высокой, когда работает в двигательном. Напряжение второй машины должно быть таким, чтобы соблюдалось необходимое для нее соотношение напряжения к частоте.
Далее источники питания двигателя и генератора меняются местами и испытание повторяется.
При каждом испытании регистрируются значения:
- UM, IM, P1, fM, sM - напряжения, тока, потребляемой мощности, частоты питающей сети, скольжения для двигателя;
- UG, IG, P2, fG, sG - напряжения, тока, выходной мощности, частоты сети, скольжения для генератора;
θc - начальной температуры охлаждающей среды.
6.3.2.3 Синхронные машины
Значения напряжения и тока обеих машин должны быть одинаковыми, и испытуемая машина должна иметь номинальный коэффициент мощности. Это можно осуществить с помощью агрегата из машины постоянного тока и синхронной, отводящей энергию генератора в сеть.
Примечание - Коэффициент мощности и поток возбуждения второй машины будут отличаться от номинальных значений из-за потерь в двухмашинном агрегате.
Далее источники питания двигателя и генератора меняются местами, и испытание повторяется.
При каждом испытании регистрируются значения:
- U, I, f - напряжения, тока, частоты питающей сети;
- P1, P2 - потребляемой и выходной мощности;
- cos φM, cos φG - коэффициентов мощности двигателя и генератора;
- θc - начальной температуры охлаждающей среды.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.4 Косвенные измерения
6.4.1 Суммарные потери
6.4.1.1 Двухмашинный агрегат с питанием от одной сети
6.4.1.1.1 Общие сведения
Это испытание применимо к машинам постоянного тока, асинхронным машинам с фазным ротором и синхронным машинам. Две одинаковые машины соединяются механически, электрическое подключение осуществляется к одной сети питания так, что обе работают при номинальной скорости и номинальном напряжении - одна как двигатель, а другая как генератор.
Примечание - Как вариант, потери могут быть скомпенсированы тарированным приводным двигателем, вспомогательным агрегатом или комбинацией этих способов.
6.4.1.1.2 Машины постоянного тока
Нагрузочная машина подключается к напряжению питания последовательно с вольтодобавочным генератором, как показано на рисунке 3. Обе машины настраиваются таким образом, чтобы ток и напряжение соответствовали режиму, при котором требуется оценить КПД. Для испытания в двигательном режиме питание должно обеспечить номинальное напряжение и необходимую нагрузку на двигатель. Для испытания генератора, которому надо обеспечить номинальное напряжение и необходимую нагрузку, напряжение должно быть отрегулировано вольтодобавочным источником. Питающая сеть главным образом компенсирует потери холостого хода, а вольтодобавочный источник - нагрузочные потери.

Рисунок 3 - Схема двухмашинного агрегата постоянного тока при питании от одной сети
Если отсутствует вольтодобавочный источник, общее значение напряжения на зажимах машин устанавливается таким, чтобы среднее значение их токов было равно номинальному. При каждом испытании регистрируются значения:
- UM, I1 - напряжения и тока питающей сети;
- РМ - мощности, подводимой на клеммы двигателя;
- UB, IВ - напряжения и тока через вольтодобавочный источник;
- n - частоты вращения;
- θc - начальной температуры охлаждающей среды.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.4.1.1.3 Асинхронные двигатели с фазным ротором
Фазный ротор испытуемой машины должен быть короткозамкнут, а ротор нагрузочной подключен к источнику, способному обеспечить номинальный ток при номинальной частоте скольжения. Регулировкой частоты и тока данного низкочастотного источника обеспечивается требуемая мощность двигателя.
При каждом испытании регистрируются значения:
- U1, I1, Р1 - напряжения, тока и мощности питающей сети;
- Ur, Ir, Рr - напряжения, тока и мощности низкочастотной цепи ротора нагрузочной машины;
- РМ - мощности, подводимой на клеммы двигателя;
- PG - мощности, передаваемой генератором;
- θc - начальной температуры охлаждающей среды.
6.4.1.1.4 Синхронные двигатели
Две одинаковые машины соединяются механически, как показано на рисунке 4, с таким угловым сдвигом роторов, что одна из машин работает с заданной нагрузкой, при которой измеряется КПД, а другая - с тем же самым абсолютным значением статорного тока.
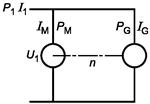
Рисунок 4 - Схема двухмашинного синхронного агрегата с общим питанием
Примечание - Сдвиг роторов представляет собой электрический угол α, примерно равный удвоенному значению угла отставания ротора при необходимом режиме нагрузки. Вообще, при данном напряжении циркулирующая мощность зависит от угла α и от токов возбуждения двигателя и генератора. Необходимо установить ток возбуждения и коэффициент мощности на одной машине номинальными; определение отклонения тока возбуждения от номинальной величины на другой машине может потребоваться для уточнения результатов.
При каждом испытании регистрируются значения:
- U1, I1, Р1 - напряжения, тока и мощности питающей сети;
- IМ, РМ - тока и мощности, подводимых на клеммы двигателя;
- IG, PG - тока и мощности генератора;
- θc - начальной температуры охлаждающей среды.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.4.1.2 Испытание с нулевым коэффициентом мощности (синхронные машины)
Перед проведением испытания необходимо ознакомиться с предварительными результатами испытаний насыщенной машины на холостом ходу в режиме многофазного короткого замыкания и перевозбужденной машины с нулевым коэффициентом мощности в соответствии с разделами 25, 26 и 28 МЭК 60034-4.
Перевозбужденная машина со свободным концом вала работает на номинальной скорости. Значение напряжения питания устанавливается таким, чтобы электродвижущая сила Е оставалась без изменения, а значение тока соответствовало требуемой нагрузке. При этом машина работает с нулевым коэффициентом мощности.
Примечание 1 - Е - векторная сумма напряжения на зажимах и реактивного падения напряжения в соответствии с разделами 30 и 31 МЭК 60034-4.
Испытание должно проводиться при температуре, близкой к установившейся температуре в номинальном режиме. Коррекции температуры обмотки при этом не требуется.
Примечание 2 - В данном испытании значение напряжения питания должно быть таким, чтобы потери в стали были такими же, как при номинальном напряжении и номинальном коэффициенте мощности под нагрузкой. Если значение напряжения питания не устанавливается и равно номинальному, это означает, что активные потери в стали значительно отличаются от таковых при полной нагрузке. В принципе, реактивная мощность может вырабатываться (при перевозбужденной машине), но когда это невозможно из-за ограниченного напряжения возбудителя, испытание может проводиться при потреблении реактивной мощности (недовозбужденная машина), если возможен устойчивый режим работы.
Потери в обмотке возбуждения при заданной нагрузке могут быть найдены по значению тока возбуждения согласно пункту 31 МЭК 60034-4 (диаграмма Потье), пункту 32 (диаграмма ASA) или пункту 33 (Шведская диаграмма). Определение потерь возбудителя производится согласно разделу 6.4.3.3. Когда ЭДС Е при нулевом коэффициенте мощности отличается от таковой при требуемой нагрузке, изменение потерь в стали может быть найдено из кривой потерь (см. 6.4.2.3) и двух значений величины Е.
Примечание 3 - Точность данного метода зависит от точности ваттметра и измерительных трансформаторов при малом коэффициенте мощности.
При каждом испытании регистрируются значения:
- U1, f, I, P1 - напряжения, частоты, тока и мощности питающей сети;
- θс, θw - начальной температуры охлаждающей среды, температуры обмотки.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.4.2 Постоянные потери
6.4.2.1 Общие сведения
Машина постоянного тока или синхронная машина может быть испытана как при работе со свободным концом вала, так и при соединении с приводным двигателем, работая в генераторном режиме (получая мощность с вала, к которому приложен момент, измеряемый согласно 6.3.1.2 или 6.3.1.3).
6.4.2.2 Условия испытания на холостом ходу
Потери холостого хода должны быть установлены при следующих условиях:
- обеспечивается номинальная скорость и напряжение машины постоянного тока (добиться установкой тока возбуждения);
- обеспечивается номинальная частота и напряжение асинхронной машины;
- обеспечивается номинальная частота и напряжение синхронной машины (добиться установкой тока возбуждения) и единичный коэффициент мощности (минимальный ток) при работе со свободным концом вала.
Примечание 1 - Машина постоянного тока или синхронная машина с возбудителем на валу (см. 3.4.3.3,а)) должна быть возбуждена от отдельного источника, а возбудитель отсоединен от источника питания и обмотки возбуждения.
Потери холостого хода считают установившимися, если подводимая мощность, измеряемая дважды с интервалом 30 мин, изменяется не более чем на 3 %.
Примечание 2 - Потери холостого хода также считают установившимися, если испытание на холостом ходу выполняется сразу после испытания под нагрузкой.
6.4.2.3 Потери трения и вентиляционные, потери в стали
Испытание проводится как минимум при семи значениях напряжения, включая номинальное, так, чтобы:
- не менее четырех значений располагались с приблизительно одинаковым интервалом в пределах от 125 % до 60 % от номинального напряжения;
- не менее трех значений располагались с приблизительно одинаковым интервалом в пределах от 50 % до 20 % от номинального напряжения или (для машины со свободным концом вала) до напряжения, при котором ток перестает уменьшаться.
Для машин постоянного тока со свободным концом вала скорость должна поддерживаться постоянной путем регулировки тока возбуждения.
Испытание должно быть выполнено как можно быстрее с изменением значения напряжения в сторону убывания.
При каждом испытании регистрируются значения:
U0, I0, Р0, R0 - напряжения, тока, мощности и сопротивления на холостом ходу, где сопротивление R0 определяется после испытаний при самых низких значениях напряжения.
Измерения в цепи возбуждения проводятся согласно 6.2.
Примечание 1 - Для машин переменного тока R0 представляет собой R11,0, для машин постоянного тока R0 - полное сопротивление всей цепи, по которой проходит ток якоря (якорь, узел коммутации, компенсационная обмотка). Если измерение сопротивления затруднительно ввиду его малой величины, допустимо его вычисление.
Для двухмашинного агрегата Р0 определяется по моменту T и частоте вращения n.
Примечание 2 - Для больших синхронных машин рекомендуется записать и другие величины, влияющие на КПД. Например, температуру хладагента, чистоту и давление газа, температуру и вязкость смазки подшипниковых узлов.
6.4.3 Потери цепи возбуждения
6.4.3.1 Испытание под нагрузкой
Машина испытывается при номинальной нагрузке, как описано в 6.4.4.1, до достижения установившегося температурного режима. Записываются значения величин согласно 6.2.
6.4.3.2 Определение потерь без испытания под нагрузкой
Для синхронных машин значение тока возбуждения Iе может быть найдено согласно пункту 31 МЭК 60034-4 (диаграмма Пуатье), пункту 32 (диаграмма ASA) или пункту 33 (Шведская диаграмма) из испытаний на холостом ходу, при коротком замыкании, при нулевом коэффициенте мощности или с вынутым ротором.
Ток возбуждения Iе регистрируется при каждой нагрузке.
Примечание - Для машин, у которых не могут быть выполнены вышеупомянутые испытания, вычисление потерь возбуждения проводится по величине тока, заявленной изготовителем.
6.4.3.3 Потери возбудителя
Возбудитель отсоединяется, если это возможно, от основной машины и присоединяется к:
а) измерителю вращающего момента для определения подводимой механической мощности согласно 6.3.1;
б) тарированному двигателю для измерения потребляемой им электроэнергии. Возбудитель присоединяется (в случае синхронной машины, возбуждаемой через контактные кольца) к подходящей резистивной нагрузке. На возбудителе устанавливаются значения напряжения Ue и тока Iе для каждого из значений нагрузки.
При каждом испытании регистрируются значения:
Ue, Iе, PEd, n, TЕ - напряжения, тока, потерь, частоты вращения и вращающего момента возбудителя для каждой точки нагрузки (PEd согласно 3.4.3.3);
ТЕ,0 - вращающего момента с неподключенным возбудителем.
Примечание - В случае соединения возбудителя с валом тарированного двигателя регистрируется потребляемая двигателем электрическая мощность.
Если возбудитель не может быть отсоединен от машины, потери возбудителя должны быть сообщены изготовителем.
6.4.4 Потери при испытаниях под нагрузкой
6.4.4.1 Испытание на нагрев при номинальной нагрузке
Машина должна работать с номинальной нагрузкой до тех пор, пока не установится тепловое равновесие (допустимый перепад температуры 2 °С в час).
В конце испытания с номинальной нагрузкой регистрируются значения:
- PN, IN, UN - номинальных мощности, тока и напряжения;
- s, f - скольжения и частоты питающей сети;
- θc - начальной температуры охлаждающей среды;
- RN = R - испытательного сопротивления для номинальной нагрузки согласно 5.7.1;
- θN - температуры обмотки при номинальной нагрузке согласно 5.7.2.
Для машин постоянного тока при работе от выпрямителей должны быть измерены значения среднего Iav и среднеквадратичного I токов.
Примечание 1 - Для машин постоянного тока R - полное сопротивление всех обмоток, по которым идет ток якоря (якорь, узел коммутации, компенсационная обмотка, последовательная обмотка). В случае, если измерение сопротивления невыполнимо из-за очень низкой величины, допустимо его вычисление.
Примечание 2 - Для машин постоянного тока f = 0.
Регистрируемые величины для определения потери в обмотках возбуждения и дополнительных потерь при испытании под нагрузкой определяются в соответствии с 6.4.3.1 и 6.4.5.3.
6.4.4.2 Испытание по нагрузочной характеристике
Примечание 1 - Это испытание применяется главным образом для определения дополнительных потерь в асинхронных двигателях.
При этом испытании двигатель должен быть прогрет так, чтобы температура обмотки не отличалась более, чем на 5 °С от температуры θN, полученной при испытании на нагрев при номинальной нагрузке (см. 6.4.4.1).
Машина должна быть нагружена и испытана при шести значениях нагрузки. Четыре значения нагрузки должны быть равномерно распределены в диапазоне от 25 % до 100 % номинальной нагрузки включительно. Два значения приблизительно с таким же интервалом устанавливаются выше 100 %, но не более 150 % номинальной нагрузки. Испытание следует начинать с задания самой высокой нагрузки, затем ее уменьшая. Это испытание должно быть выполнено по возможности быстро, чтобы минимизировать изменение температуры машины.
В машинах переменного тока изменение частоты при испытании не должно превышать 0,1 %. Перед первым измерением (при наибольшей нагрузке) и после его окончания измеряется R. При нагрузке 100 % и более сопротивление должно определяться перед заданием самого высокого значения нагрузки. При нагрузке, меньшей 100 %, сопротивление определяется как линейно зависящее от нагрузки в пределах от самого высокого до самого низкого ее значения.
Примечание 2 - В машинах переменного тока сопротивления могут также быть определены путем измерения температуры обмотки статора с помощью установленных на ней датчиков. Сопротивления для каждого значения нагрузки могут тогда быть определены в зависимости от температуры обмотки относительно сопротивления и температуры, измеренной перед началом испытания.
Для каждого значения нагрузки регистрируются:
U, I, P1, R, n, f, T - значения напряжения, тока, потребляемой мощности, сопротивления, частоты вращения, частоты питающей сети, вращающего момента машины, где R определяется из 5.7.1.
6.4.4.3 Испытание под нагрузкой с пониженным напряжением (асинхронные машины)
Этот метод используется для больших машин, которые не могут быть испытаны при полной нагрузке. Проводятся испытания под нагрузкой с номинальной скоростью, без нагрузки при пониженном напряжении Ured и без нагрузки с номинальным напряжением и частотой.
В данном методе предполагается, что при пониженном напряжении и поддержании постоянной скорости, значения тока уменьшаются пропорционально напряжению, а значения мощности - квадрату напряжения.
При пониженном напряжении регистрируются значения:
Ured, Ired, P1red, I0red, cos(φ0red) - напряжения, тока, потребляемой мощности, тока холостого хода, коэффициента мощности.
При номинальном напряжении регистрируются значения:
UN, I0, cos(φ0) - напряжения, тока холостого хода, коэффициента мощности.
6.4.4.4 Метод схемы замещения (асинхронные машины)
6.4.4.4.1 Общие сведения
Этот метод может быть применен в том случае, когда невозможно испытание под нагрузкой. Он основан на Т-образной схеме замещения фазы асинхронной машины, включающей эквивалентное активное сопротивление Rfe для учета потерь в стали, параллельное реактивному сопротивлению цепи намагничивания Хm (см. рисунок 5). Сопротивления ротора приведены к статору, что обозначено апострофом в символах, например Х'or.

Рисунок 5 - Т-образная схема замещения асинхронного двигателя с эквивалентным сопротивлением Rfe для учета потерь в стали
Применение данного метода к асинхронным машинам требует знания следующих величин:
Xos/X'or - отношение реактивных сопротивлений полей рассеяния статора и ротора;
αr - температурный коэффициент обмотки ротора (проводимость относительно 0 °С);
Xos, Xm - реактивные сопротивления рассеяния статора и цепи намагничивания.
Примечание 1 - При использовании метода схемы замещения в 6.4.4.4 и 8.2.2.4.3 все напряжения, токи и полные сопротивления являются фазными для трехфазной машины в схеме «звезда», активные и реактивные мощности относятся к машине в целом.
Примечание 2 - Для меди αr = 1/235, для алюминия αr = 1/225.
Примечание 3 - Метод определения параметров схемы замещения описан в 8.2.2.4.3.
6.4.4.4.2 Испытания на пониженной частоте
Машина с заторможенным ротором питается от трехфазного регулируемого преобразователя частоты, способного устанавливать частоты до 25 % от номинальной при номинальном токе. Среднее значение сопротивления должно быть получено по результатам измерений при различных положениях ротора относительно статора.
Примечание 1 - Во время испытаний преобразователь частоты, будь он электромашинный или статический, должен на выходе обеспечивать практически синусоидальный ток.
Примечание 2 - Обмотка ротора машины с фазным ротором должна быть при испытании короткозамкнута.
При испытании машина питается номинальным током при трех, по крайней мере, частотах: первой - не менее чем 25 %, а второй и третьей - между 25 % и 50 % от номинальной частоты. Во время этого кратковременного испытания температура статорной обмотки не должна повыситься более чем на 5 °С.
При испытаниях для трех значений частот регистрируются значения:
U, I, f, Р1, Rs, θc, θw - напряжения, тока, частоты питающей сети, потребляемой мощности, сопротивления статора, начальной температуры охлаждающей среды, температуры обмотки.
6.4.4.4.3 Испытания при номинальной частоте
Значение полного сопротивления может быть определено с помощью следующих испытаний:
а) реактивное сопротивление определяется при испытании при заторможенном роторе, номинальных частоте и токе и пониженном напряжении. Регистрируются значения напряжения, тока, мощности, частоты и температуры;
б) сопротивление ротора определяется одним из двух испытаний:
1) при номинальной частоте и номинальном напряжении с уменьшенной нагрузкой регистрируются значения напряжения, мощности, тока, скольжения и температуры для каждого значения нагрузки;
2) при отключении от сети двигателя, работающего на холостом ходу при номинальной частоте и номинальном напряжении, регистрируются значения напряжения разомкнутой цепи статора и температуры обмотки в функции времени.
Примечание - Данное испытание предполагает относительно низкий ток вытеснения в роторе.
6.4.5 Дополнительные потери от нагрузки
6.4.5.1 Двухмашинный агрегат при питании от одной сети (машины постоянного тока)
Этот метод позволяет определить дополнительные потери при наличии двух идентичных машин постоянного тока. Обе машины должны быть соединены механически и питаться от одного источника постоянного тока, причем последовательно с машиной, работающей в генераторном режиме, включается вольтодобавочный генератор (см. рисунок 6).
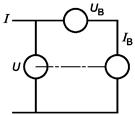
Рисунок 6 - Схема двухмашинного агрегата при питании от одной сети (машины постоянного тока)
Если машина предназначена для работы в двигательном режиме, ее питание должно осуществляться номинальными для нее напряжением и током. Машины, разработанные как генераторы, должны питаться номинальным для генератора напряжением и током. Управляя возбуждением, следует добиться соответствия ЭДС испытательной нагрузке.
Примечание - Питающая сеть главным образом покрывает потери холостого хода, а вольтодобавочный источник - потери от нагрузки.
При испытании машины с возбудителем на валу ее обмотка возбуждения должна питаться от отдельного источника.
При достижении теплового равновесия регистрируются значения:
U, I, UB, IВ, Ue,M, Iе,M, Ue,G, Ie,G, n, θc - напряжения, тока, напряжения на добавочной машине, тока добавочной машины, напряжения и тока возбуждения двигателя, напряжения и тока возбуждения генератора, частоты вращения, начальной температуры охлаждающей среды.
6.4.5.2 Потери при питании машины постоянного тока от выпрямителя, вызванные пульсациями тока
Данные потери определяются при испытании нагруженной машины, питаемой соответствующим выпрямителем (см. МЭК 60034-19).
При испытании регистрируются значения:
Р1 - мощности переменного тока, поставляемой машине;
I - действующего (среднеквадратичного) значения переменной составляющей якорного тока;
θw - температуры якорных обмоток.
Примечание - Для двигателей с последовательным возбуждением при малых нагрузках пульсации тока приводят к увеличению вращающего момента (этим увеличением можно пренебречь).
6.4.5.3 Испытание под нагрузкой с измерением вращающего момента (асинхронные машины)
Для определения добавочных потерь испытание под нагрузкой проводится согласно 6.4.4.2 с измерителем вращающего момента, удовлетворяющим требованиям 5.5.4.
Для каждого значения нагрузки дополнительно регистрируется вращающий момент Т.
6.4.5.4 Испытание с вынутым ротором и обратным вращением поля (асинхронные машины)
6.4.5.4.1 Общие сведения
Определение добавочных потерь производится на основе двух испытаний:
а) с вынутым ротором (для определения добавочных потерь от основной частоты);
б) с машиной, принудительно вращающейся на синхронной скорости против поля (для определения высокочастотных добавочных потерь).
Во время обоих испытаний статор должен питаться регулируемым симметричным многофазным напряжением номинальной частоты: для четырех значений токов - между 25 % и 100 % от номинального и для двух - выше, но не больше чем 150 % от номинального. Значение тока ротора под нагрузкой IL рассчитывается по формуле
![]() (4)
(4)
где I - величина тока статора во время работы двигателя под нагрузкой;
I0 - величина тока холостого хода при номинальном напряжении.
6.4.5.4.2 Испытание с вынутым ротором
При данном испытании все элементы конструкции, в которых могут индуцироваться токи, например подшипниковые щиты, должны оставаться на месте.
Для каждого значения тока нагрузки регистрируются с индексом rm:
Р1,rm, IL,rm, Rrm, θw,rm - потребляемая мощность, ток нагрузки, сопротивление и температура обмотки.
6.4.5.4.3 Испытание с вращением против поля
При данном испытании полностью собранная машина соединяется с приводным двигателем мощностью не меньше чем общая сумма номинальных потерь и не больше чем пятикратные номинальные потери испытуемой машины. Если для определения мощности на валу используется измеритель вращающего момента, максимальный измеряемый момент не должен превышать в десять раз момент, соответствующий номинальным суммарным потерям испытуемой машины. Для машин с фазным ротором клеммы ротора должны быть замкнуты накоротко.
Испытуемая машина вращается с синхронной скоростью в направлении, противоположном нормальному чередованию фаз:
а) измеряется значение мощности Р0rr, передаваемой от приводной машины двигателю с отключенным от питания статором;
б) к статору двигателя прикладывается напряжение, при котором величина тока статора равна значениям, полученным при испытании с вынутым ротором.
Для каждого значения тока нагрузки регистрируются с индексом rr:
IL,rr, Rrr, P1,rr, θw,rr - ток в нагрузке, сопротивление обмотки, мощность, температура обмотки испытуемого двигателя и PD,rr - мощность приводного двигателя.
Примечание - Низкий коэффициент мощности при испытании может потребовать коррекции показаний ваттметра.
6.4.5.5 Испытание по схеме «звезда» (асинхронные машины)
При данном испытании двигатель работает на холостом ходу с несимметричным питанием. Схема испытания представлена на рисунке 7. Обмотки двигателя, предназначенные для соединения по схеме «треугольник», во время этого испытания должны быть соединены по схеме «звезда». Чтобы отсутствовали токи нулевой последовательности, нулевая точка «звезды» не должна быть соединена с нейтралью или с землей. Одна из фаз двигателя должна быть связана с фазой сети посредством резистора Reh (см. рисунок 7), имеющего приблизительно следующую величину:
- для схемы «звезда» ![]() (5)
(5)
- для схемы «треугольник» ![]() (6)
(6)
Резистор Reh, используемый во время испытания, должен быть выбран таким образом, чтобы значение тока прямой последовательности I(1) было не более 30 % от значения тока обратной последовательности I(2), а частота вращения двигателя была близка к номинальной (см. ниже). Рекомендуется начать испытание с величины резистора Reh, которая отличается не более чем на 20 % от расчетной величины R'eh.

Рисунок 7 - Схема испытания «звезда»
Значения токов при испытаниях It рассчитываются по формулам:
- для схемы «звезда» ![]() (7)
(7)
- для
схемы «треугольник»  (8)
(8)
Значения напряжения при испытаниях Ut рассчитываются по формулам:
- для схемы «звезда» Ut = UN, (9)
- для схемы «треугольник» ![]() (10)
(10)
Испытания начинаются, когда потери холостого хода стабилизируются согласно 6.4.2.2. Регистрируются значения сопротивлений между зажимами V и W(RVW) до начала и после завершения испытания.
Чтобы избежать чрезмерного и неравномерного нагревания трех фаз, испытание должно быть проведено на холодной машине как можно быстрее.
Испытание больших двигателей может быть начато без резистора Reh (S переключается в положение 1 на рисунке 7) при пониженном напряжении (25 % - 40 % от UN). После разогрева присоединяется Reh переводом переключателя S в положение 2.
Двигатели меньшей мощности запускаются с резистором Reh. В этом случае переключатель S не нужен.
Напряжение питания регулируется для получения шести экспериментальных точек. Экспериментальные точки выбираются таким образом, чтобы значения фазных токов IV были расположены приблизительно на одинаковом расстоянии от 150 % до 75 % от номинального тока фазы V. Испытание начинается с самого высокого значения тока и продолжается в порядке его убывания.
Линейное сопротивление RVW для 100 %-ого испытательного тока и более низких значений определяется после испытания при самом низком значении тока (в конце испытания). Сопротивление, используемое для токов выше 100 %, должно быть определено как линейная функция тока, используя значения измерения до испытания и после его завершения. Сопротивление в результате испытания определяется путем экстраполяции согласно 5.7.1.
При каждом испытательном напряжении регистрируются значения:
IU, IV, IW, UUV, UVW, UWU, PUV, PWV, n - токов в фазах U, V, W, фазных напряжений, мощностей и частоты вращения.
Примечание 1 - При данном испытании недопустимо усреднение значений сопротивления фаз.
Примечание 2 - Значения сопротивления также могут быть определены при измерении температуры обмотки статора; для чего используются датчики температуры, установленные на обмотке. Значения сопротивления для каждого испытательного тока в этом случае могут быть определены по соотношению температуры в данной точке и температуры, измеренной перед началом испытания.
Примечание 3 - Широко применяемые ваттметры симметрируют три фазы двигателя, образуя виртуальную звезду. Однако при данном испытании используется принципиально несимметричное питание. Поэтому важно гарантировать, что отсутствует заземление нуля звезды и не установлена виртуальная звезда. Должна быть собрана цепь в точном соответствии с рисунком 7.
Для получения точных результатов скольжение не должно превышать двойного номинального для всех значений токов, иными словами, n > nsyn - 2 (nsyn - nN). Если это условие не соблюдается, испытание должно быть повторено с увеличенной величиной Reh. Если двигатель работает нестабильно при значении тока ниже 100 % от номинального тока фазы, данные экспериментальные точки должны быть опущены.
6.4.5.6 Испытания при коротком замыкании и на холостом ходу (синхронные машины)
6.4.5.6.1 Испытание при коротком замыкании в двухмашинном агрегате
Испытуемая машина с короткозамкнутой обмоткой якоря (статора) соединена с приводным двигателем, при этом регистрируется вращающий момент с помощью измерителя момента (см. 6.3.1.2) или динамометра (см. 6.3.1.3). Машина работает на номинальной скорости при таком возбуждении, чтобы значение тока в короткозамкнутой обмотке было равно номинальному.
Примечание - Машина с возбудителем на валу (см. 3.4.3.3 а)) должна быть возбуждена от независимого источника, а возбудитель отключен от питания и обмотки возбуждения.
Предполагается, что сумма потерь от нагрузки и добавочных потерь не зависит от температуры и приведение к нормативной температуре не требуется. Предполагается также, что добавочные потери изменяются в функции квадрата тока статора.
При проведении испытания регистрируются значения:
Т, n, I - вращающего момента, частоты вращения и тока.
Измерения в цепи возбуждения проводятся согласно 6.2.
6.4.5.6.2 Испытание на холостом ходу
Машина работает в режиме синхронного двигателя при неизменном напряжении величиной 1/3 от номинального или ниже, если возможна устойчивая работа. Ток якоря (статора) регулируется изменением значения тока возбуждения в пределах 125 % и 25 % от номинального. Измерения проводятся при шести значениях тока статора в данном диапазоне и должны включать одно или два измерения при наименьшем значении тока. Максимальное значение тока при испытании, обычно составляющее 125 % от номинального, должно быть заявлено изготовителем, хотя иногда обмотка ротора может не допускать превышения 100 % от номинального тока. Начинать испытание следует с измерений при наибольшем значении тока, чтобы обеспечить более постоянную температуру обмотки статора во время испытания.
При испытании регистрируются значения:
P1, I, U - входной мощности, тока и напряжения.
Измерения в цепи возбуждения проводятся согласно 6.2.
Примечание - Для машин большой мощности значение максимального тока может быть ограничено 60 % - 70 % от значения номинального тока ротора.
7 Определение КПД машины постоянного тока
7.1 Определение КПД прямыми измерениями
7.1.1 Испытание путем измерения вращающего момента
При испытании, проведенном согласно 6.3.1, КПД рассчитывается по формуле:
![]()
![]() (11)
(11)
Согласно 6.3.1.1, входная мощность Р1 и выходная мощность Р2:
- в режиме двигателя: Р1 = Реl; Р2 = Pmech;
- в режиме генератора: Р1 = Pmech; P2 = Реl,
где Реl, Т, n определяются согласно 6.3.1.2, 6.3.1.3;
Pmech = 2πTn.
Р1Е определяется согласно 6.2 с использованием 3.4.3.3 и 3.4.3.4.
Примечание - Потери в цепи возбуждения, не покрываемые Р1Е, компенсируются со стороны вала.
7.1.2 Испытание в двухмашинном агрегате
Если две одинаковые машины работают в номинальном режиме, КПД вычисляется по половине общих потерь и средней входной мощности двигателя и генератора следующим образом
 (12)
(12)
где РТ = 0,5(Р1 - Р2) + Р1Е; Р1Е = 0,5(Р1Е,M + Р1Е,G),
причем Р1 и Р2 определяются согласно 6.3.2, Р1Е определяется согласно 6.2 с использованием 3.4.3.3 и 3.4.3.4.
7.2 Определение КПД косвенным методом
7.2.1 Суммарные потери
7.2.1.1 Двухмашинный агрегат с питанием от одной сети
Если две одинаковые машины работают в номинальном режиме, КПД вычисляется исходя из того, что потери в каждой машине равны половине суммарных. КПД рассчитывается по формуле
![]() (13)
(13)
где РТ - общие потери одной машины, определенные как половина суммарных потерь;
РМ - мощность, потребленная из сети машиной, работающей в двигательном режиме (исключая мощность возбуждения), согласно 6.4.1.1;
Р1Е - мощность возбуждения, подаваемая от независимого источника (для машин с вольтодобавочным генератором, см. 6.4.1.1.2).
PT = 0,5(UMI1 + UBIB) + P1E; (14)
P1E = 0,5(P1E,M + P1E,G). (15)
7.2.2 Суммирование отдельных потерь
7.2.2.1 КПД
КПД определяется по формуле
![]() (16)
(16)
где Р1 - входная мощность, исключая мощность возбуждения от независимого источника,
Р1Е - мощность возбуждения, подаваемая независимым источником;
РТ - суммарные потери одной машины, определяемые согласно 7.2.2.2;
Р2 - выходная мощность.
Примечание 1 - Обычно первая часть равенства применяется для двигателя, вторая - для генератора.
Примечание 2 - Суммарные потери РТ включают потери от возбуждения Ре (см. 6.2).
7.2.2.2 Суммарные потери
Общие потери вычисляются как сумма отдельных потерь по 7.2.2.3 - 7.2.2.6:
PT = Pc + Pa + Pb + PLL + Pe, (17)
Ре = Pf + РЕd. (18)
где Рс - постоянные потери;
Ра - потери в якорной обмотке;
Рb - потери в щетках;
PLL - дополнительные потери;
Pf - потери в обмотке возбуждения;
PEd - потери в возбудителе.
7.2.2.3 Постоянные потери
7.2.2.3.1 Определение постоянных потерь
Постоянные потери определяются по формуле
Рс = Р0 - Ра, (19)
где ![]()
I0 и R0 соответствуют каждому уровню напряжения, установленного согласно 6.4.2.3. Если измерение сопротивления невыполнимо из-за очень низких его значений, допустимо его вычисление, приведенное к ожидаемой температуре обмотки.
Примечание - Ра - потери в роторе, включающие потери в компенсационных обмотках, полюсных коммутационных обмотках и шунтирующих резисторах. При наличии шунтирующих резисторов, включенных параллельно последовательной обмотке, электрические потери в якорной цепи могут быть определены по полному току и эквивалентному сопротивлению цепи.
7.2.2.3.2 Трение и вентиляционные потери (дополнительно)
Для каждого значения напряжения, меньшего или равного 50 % по 6.4.2.3, строится кривая постоянных потерь Рс (см. 7.2.2.3.1) в зависимости от напряжения U02. Прямая линия экстраполируется до нулевого напряжения. Точка пересечения с осью потерь при нуле по оси напряжения представляет собой потери трения и вентиляционные потери Pfw.
7.2.2.3.3 Потери в стали (дополнительно)
Для каждого значения напряжения в диапазоне от 60 % до 125 % по 6.4.2.3 строится кривая постоянных потерь Рс (см. 7.2.2.3.1) в зависимости от ЭДС U0, вычисляемой по формулам:
для двигателя: U0 = UN - (IR)a - 2Ub; (20)
для генератора: U0 = UN + (IR)a + 2Ub, (21)
где UN - номинальное напряжение;
I - ток при заданной нагрузке;
R - сопротивление всех обмоток цепи якоря при температуре, соответствующей максимальной нагрузке;
2Ub - падение напряжения в щеточном узле в соответствии с 7.2.2.4.2.
Потери в стали определяются по формуле
Pfe = Pc - Pfw, (22)
где Рfw определяется согласно 7.2.2.3.2.
7.2.2.4 Потери от нагрузки
7.2.2.4.1 Потери в обмотках цепи ротора
Для каждой заданной нагрузки определяются потери в обмотках цепи ротора
Ра = I2R, (23)
где I и R определяются согласно 5.7.2 и 6.4.4.2, причем R включает все обмотки в цепи якоря.
7.2.2.4.2 Электрические потери в щетках
Потери в щетках определяются с использованием справочного падения напряжения на щетке по формуле
Pb = 2UbI, (24)
где Ub - справочное падение напряжения на щетку в зависимости от ее типа:
1,0 В - для угольных, электрографитных или графитных щеток;
0,3 В - для металлоуглеродных щеток;
I - ток якоря в заданном режиме.
7.2.2.5 Потери в цепи возбуждения
При испытании под нагрузкой согласно 6.4.3.1 потери в обмотке возбуждения рассчитываются по формуле
Pf = UeIe. (25)
При испытании без нагрузки потери возбуждения Ре вычисляются по формуле
![]() (26)
(26)
где Rf - сопротивление параллельной или независимой обмотки возбуждения, приведенное к нормативной температуре, определенной в 5.7.3;
Iе - ток возбуждения, который определяется одним из следующих способов:
а) для генераторов с параллельной или независимой обмоткой возбуждения при наличии или отсутствии переключаемых полюсов ток Iе составляет 110 % от соответствующего тока возбуждения без нагрузки при напряжении, равном номинальному напряжению плюс омическое падение напряжения в цепи якоря (якорь, щетки и переключаемые обмотки, если таковые имеются, см. также 7.2.2.4.1) при заданном токе;
б) для компенсированных генераторов с параллельным или независимым возбуждением ток Iе равен соответствующему току возбуждения без нагрузки при напряжении, равном номинальному напряжению плюс омическое падение напряжения в цепи якоря при заданном токе;
в) для генераторов со смешанным возбуждением (компаундных) ток Iе равен соответствующему току возбуждения при напряжении без нагрузки;
г) для перекомпенсированных и недокомпенсированных генераторов, а также специальных типов генераторов, не перечисленных в пунктах а), б) и в), определение тока Iе является предметом отдельного соглашения;
д) для двигателей с параллельной обмоткой возбуждения ток Iе равен соответствующему току возбуждения без нагрузки при номинальном напряжении.
Потери возбуждения PEd согласно 6.4.3.3, определяемые при испытании, равны
PEd = 2πn(ТЕ - TЕ,0)/60 + Р1Е - UeIe, (27)
где ТЕ,0 - вращающий момент с неподключенным возбудителем.
Во всех других случаях потери должны вычисляться.
7.2.2.6 Добавочные потери от нагрузки
7.2.2.6.1 Потери от постоянной составляющей тока (испытание в двухмашинном агрегате при питании от одной сети)
Дополнительные потери в каждой машине определяются при номинальном токе по измеренным величинам по 6.4.5.1:
PLL = 0,5(P1 - ΣРc - ΣРа - Рcon - 2Ub(I + Iв) - 2IBUb, (28)
где Р1 = UMI1 + UBIB - мощность питания и вольтодобавочного устройства (см. рисунок 3),
ΣРc - сумма постоянных потерь обеих машин согласно 7.2.2.3;
ΣРа - сумма потерь сопротивления обеих цепей якоря согласно 7.2.2.4.1;
Рcon - потери в соединительных проводниках.
Для определения потерь при других режимах работы используется поправочный коэффициент в соответствии с таблицей 5.
7.2.2.6.2 Потери от переменной составляющей тока
Дополнительные потери в якорной цепи от переменной составляющей напряжения питания рассчитываются по формуле
PLL = P1 - I2Ra, (29)
где Р1 и I - определяются согласно 6.4.5.2;
Ra - сопротивление цепи якоря постоянному току при номинальной температуре.
7.2.2.6.3 Приближенная оценка добавочных потерь от постоянной и переменной составляющих
Предполагается, что потери постоянного тока изменяются как квадрат тока и что их суммарная величина при номинальном токе составляет:
а) для машин без компенсации
- 1 % номинальной подводимой мощности для двигателей,
- 1 % номинальной отдаваемой мощности для генераторов;
б) для машин с компенсацией
- 0,5 % номинальной входной мощности для двигателей,
- 0,5 % номинальной выходной мощности для генераторов.
Для машин с неизменной частотой вращения номинальная мощность - мощность с номинальным током и номинальным напряжением.
Для двигателей с частотой вращения, регулируемой изменением приложенного напряжения, номинальная подводимая мощность определяется для каждой частоты вращения как произведение напряжения, соответствующего этой частоте вращения, на максимальный номинальный ток, взятый из всего диапазона.
Для двигателей с частотой вращения, регулируемой ослаблением поля, номинальная подводимая мощность определяется как произведение номинального напряжения на максимальный номинальный ток. Для генераторов с изменяющейся скоростью и стабилизацией напряжения полем номинальная отдаваемая мощность определяется как произведение номинального напряжения на максимальный номинальный ток. Добавочные потери при скорости, соответствующей полному потоку, должны определяться по пунктам а) и б). Добавочные потери при других скоростях вычисляются умножением этой величины на соответствующий поправочный коэффициент из таблицы 5.
Для отношений максимальной частоты вращения к номинальной, отличающихся от приведенных в таблице 5, соответствующие поправочные коэффициенты определяются интерполяцией.
Таблица 5 - Поправочные коэффициенты
|
Поправочный коэффициент |
|
|
1,5:1 |
1,4 |
|
2:1 |
1,7 |
|
3:1 |
2,5 |
|
4:1 |
3,2 |
Для двигателей, питающихся от полупроводниковых преобразователей, если коэффициент пульсаций тока якоря превышает 0,1, добавочные потери от переменной составляющей должны быть определены согласно 7.2.2.6.2 дополнительно к рассчитанным выше.
8 Определение КПД асинхронных машин
8.1 Определение КПД прямыми измерениями
8.1.1 Испытание с измерением вращающего момента
Для испытаний, проведенных в соответствии с 6.3.1, КПД вычисляется по формуле
η = Р2/Р1. (30)
Потребляемая мощность Р1 и отдаваемая мощность Р2 определяются согласно 6.3.1.1:
- для двигательного режима Р1 = Реl; Р2 = Pmech;
- для генераторного режима Р1 = Pmech; P2 = Реl,
где Реl, Т и n определяются согласно 6.3.1.2 и 6.3.1.3, Pmech = 2πТn.
8.1.2 Измерение в двухмашинном агрегате при питании от двух сетей
Если две одинаковые машины работают в номинальном режиме, КПД может быть рассчитан по половине суммарных потерь и средней потребляемой мощности двигателя и генератора по формуле
 (31)
(31)
где РТ = 0,5(Р1 - Р2);
Р1 и Р2 определяются согласно 6.3.2.
8.2 Определение КПД косвенным методом
8.2.1 Суммарные потери в двухмашинном агрегате при питании от одной сети
Если две одинаковые машины работают в номинальном режиме, КПД может быть рассчитан по половине суммарных потерь по формуле
η = 1 - РТ/РМ, (32)
где РТ - общая сумма потерь, определенная как половина общей потребляемой мощности, что для асинхронных машин с фазным ротором, испытуемых согласно 6.4.1.1.3, составляет РТ = 0,5(Р1 + Р2);
РМ - мощность, потребляемая машиной, работающей в двигательном режиме согласно 6.4.1.1.
8.2.2 Суммирование составляющих потерь
8.2.2.1 КПД
КПД определяется из следующих равенств по формуле
![]() (33)
(33)
где Р1 - потребляемая мощность при номинальной нагрузке согласно 6.4.4.1;
РТ - суммарные потери согласно 8.2.2.2;
Р2 - выходная мощность.
Примечание - Первое равенство используется для двигателя, второе - для генератора.
8.2.2.2 Суммарные потери
Суммарные потери рассчитываются как сумма постоянных потерь по 8.2.2.3, потерь от нагрузки по 8.2.2.4 и дополнительных потерь от нагрузки по 8.2.2.5:
PT = Pc + Ps + Pr + PLL. (34)
8.2.2.3 Постоянные потери
8.2.2.3.1 Общие сведения
Постоянные потери Рс, которые являются суммой потерь трения, вентиляционных и потерь в стали, определяются разностью входной мощности без нагрузки Р0 и потерь в обмотках без нагрузки Ps (при температуре во время испытания без нагрузки). Постоянные потери для каждого значения напряжения U0, зарегистрированного по данным, полученным в 6.4.2, определяются по формуле
Pc = P0 - Ps = Pfw + Pfe, (35)
где ![]() (см.
6.4.2.3).
(см.
6.4.2.3).
8.2.2.3.2 Потери трения и вентиляционные
Зависимость постоянных потерь Рс от
квадрата напряжения ![]() , полученная в предыдущем пункте,
экстраполируется прямой линией. Точка пересечения этой прямой с нулевой осью
напряжения представляет собой потери трения и вентиляционные Pfw.
, полученная в предыдущем пункте,
экстраполируется прямой линией. Точка пересечения этой прямой с нулевой осью
напряжения представляет собой потери трения и вентиляционные Pfw.
Примечание - Предполагается, что найденные потери трения и вентиляционные постоянны при любом значении нагрузки.
8.2.2.3.3 Потери в стали
При значениях напряжения от 60 % до 125 % от номинального строится зависимость Pfe = Рс - Рfw от напряжения холостого хода статора U0. Потери в стали при заданной нагрузке определяются по полученной зависимости. При этом по горизонтальной оси откладывается значение падения напряжения в первичной активной цепи Ur полученное по формуле
 (36)
(36)
где ![]()
![]()
U, P1, I и R определяются согласно 6.4.4.2.
8.2.2.4.1 Испытание под нагрузкой
8.2.2.4.1.1 Общие сведения
Потери от нагрузки для определения номинального КПД определяются по данным, полученным по 6.4.4.1. Дополнительные потери от нагрузки определяются по данным, полученным по 6.4.4.2.
8.2.2.4.1.2 Потери в обмотке статора и температурная поправка
Потери в обмотке статора при заданной нагрузке определяются по формуле
Ps = 1,5I2R, (37)
где I и R определяются согласно 6.4.4.1.
Приведенные к номинальной температуре хладагента 25 °С потери обмотки статора при заданной нагрузке определяются по формуле
Ps,θ = Pskθ, (38)
где kθ - температурный коэффициент приведения сопротивления, определяемый согласно 5.7.3.
8.2.2.4.1.3 Потери в обмотке ротора и температурная поправка
Потери в обмотке ротора при заданной нагрузке определяются по формуле
Pr = (P1 - Ps - Pfe)s, (39)
где ![]()
P1, n и f определяются согласно 6.4.4.1;
Ps определяется согласно 8.2.2.4.1.2;
Pfe определяется согласно 8.2.2.3.3.
Приведенные к номинальной температуре хладагента 25 °С потери обмотки ротора при заданной нагрузке определяются по формуле
Pr,θ = (P1 - Ps,θ - Pfe)sθ. (40)
где Ps,θ определяется согласно 8.2.2.4.1.2;
Pfe определяется согласно 8.2.2.3.3;
sθ = skθ - скольжение, приведенное к номинальной температуре хладагента 25 °С (см. 5.7.3);
kθ - температурный коэффициент приведения (см. 5.7.3).
8.2.2.4.1.4 Электрические потери в щеточном узле (только для фазного ротора)
Данные потери включены в состав потерь, описанных в 8.2.2.4.1.3. Потери в щеточном узле на фазу определяются по формуле
Pb = NUbI2, (41)
где N - общее количество работающих фаз;
Ub - справочное падение напряжения на щетке в зависимости от ее типа:
1,0 В - для угольных или графитных щеток,
0,3 В - для металлографитных щеток;
I2 - ток ротора (не приведенный к цепи статора).
Примечание - Значение тока ротора I2 может быть взято из документации.
8.2.2.4.2 Потери при испытании под нагрузкой с пониженным напряжением
По результатам испытания, описанного в 6.4.4.3, вычисляются значения тока под нагрузкой и потребляемой мощности при номинальном напряжении
![]() (42)
(42)
где  (43)
(43)
 (44)
(44)
Примечание - Символы с чертой сверху обозначают векторы (см. рисунок 8).
Потери при испытании под нагрузкой, таким образом, вычисляются по найденным значениям I и P1, а также по значению скольжения, измеренному при пониженном напряжении, как описано в 8.2.2.4.1.

Рисунок 8 - Векторная диаграмма для нахождения векторов I и Р1
8.2.2.4.3 Потери по методу схемы замещения
8.2.2.4.3.1 Измеряемые величины
Метод основан на Т-образной схеме замещения (см. 6.4.4.4 и рисунок 5).
Примечание - При использовании данного метода все напряжения, токи и полные сопротивления являются фазными для трехфазной машины, включенной по схеме «звезда»; активные и реактивные мощности относятся к машине в целом.
Данная процедура основана на методе, описанном в 6.4.4.4.2. При использовании метода, описанного в 6.4.4.4.3, необходимо учесть следующее:
а) реактивные сопротивления вычислены согласно 8.2.2.4.3.2;
б) приведенное сопротивление ротора определено:
- при испытании, описанном в 6.4.4.4.3 а), вычислением ![]() для схемы замещения,
представленной на рисунке 5.
Величина
для схемы замещения,
представленной на рисунке 5.
Величина ![]() привязывается
к условию, при котором значение расчетной мощности находится в пределах 0,1 %
от измеренной мощности или значение расчетного тока - в пределах 0,1 % от
измеренного тока;
привязывается
к условию, при котором значение расчетной мощности находится в пределах 0,1 %
от измеренной мощности или значение расчетного тока - в пределах 0,1 % от
измеренного тока;
- при испытании, описанном в 6.4.4.4.3 б), вычислением постоянной времени по
графику, иллюстрирующему темп снижения напряжения при отключении цепи статора. ![]() рассчитывается
по формуле
рассчитывается
по формуле
![]() (45)
(45)
где Xm - реактивное сопротивление цепи намагничивания;
![]() - реактивное
сопротивление рассеяния ротора;
- реактивное
сопротивление рассеяния ротора;
f - частота;
τ0 - постоянная времени.
Величина
![]() найденная при испытании,
приводится к сопротивлению при рабочей температуре.
найденная при испытании,
приводится к сопротивлению при рабочей температуре.
Реактивные мощности определяются при
- испытании без нагрузки при номинальном напряжении U0 = UN и номинальной частоте (6.4.4.2)
![]() (46)
(46)
- испытании с заторможенным ротором с уменьшающейся частотой (6.4.4.4.2)
![]() (47)
(47)
где U0, I0 и Р0 - фазные напряжение и ток, а также подводимая мощность при испытании на холостом ходу при номинальном напряжении;
U, I и Р1 - фазные напряжение и ток, а также подводимая мощность при испытании с заторможенным ротором (6.4.4.4.3) при частотах f при данном испытании.
8.2.2.4.3.2 Параметры схемы замещения
Параметры схемы замещения определяются в несколько этапов.
Реактивное сопротивление Хm по результатам испытания без нагрузки и Xσs,Lr при испытании с заторможенным ротором при значении частоты 25 % от номинальной рассчитывается по формулам:
 (48)
(48)
 (49)
(49)
![]() (50)
(50)
![]() (51)
(51)
Расчет проводится с использованием следующих величин в качестве исходных:
Хσs, Xm и Xσs/Х'σr.
Расчет повторяют до тех пор, пока значения Хσs и Хm не станут отличаться менее чем на 0,1 % от значений, полученных на предыдущем этапе.
Сопротивление, характеризующее потери в стали на фазу при номинальном напряжении, рассчитывается по формуле
 (52)
(52)
где Pfe - потери в стали согласно 8.2.2.3.3 при номинальном напряжении.
Сопротивление ротора рассчитывается для каждого измерения реактивного сопротивления при проведении испытаний с заторможенным ротором при различных частотах по формуле
 (53)
(53)
где Rs - сопротивление фазы обмотки статора при температуре испытания θW.
Примечание - Температура обмотки ротора может сильно отличаться от температуры обмотки статора, поэтому метод неточен.
Сопротивление ротора приводится к нормативной температуре (см. 5.7.2, и таблицу 4) для каждой частоты и рассчитывается по формуле
![]() (54)
(54)
После вычисления значения строится график зависимости ![]() от
частоты fLr.
Точка пересечения графика с fLr = 0 дает значение
сопротивления ротора
от
частоты fLr.
Точка пересечения графика с fLr = 0 дает значение
сопротивления ротора ![]()

Рисунок 9 - Упрощенная схема замещения асинхронной машины
Для каждого заданного промежуточного значения нагрузки вычисляются значения полного, активного, реактивного сопротивлений и проводимости (см. рисунок 9) в зависимости от скольжения:
 (55)
(55)
 (56)
(56)
 (57)
(57)
Затем вычисляются значения сопротивлений относительно клемм по формулам:
R = Rs + Rg, (58)
X = Xσs + Xg, (59)
![]() (60)
(60)
где s - скольжение,
Rs - сопротивление фазы обмотки статора при нормативной температуре θref.
8.2.2.4.3.3 Токи и потери
В следующей последовательности рассчитываются:
- ток фазы статора ![]() (61)
(61)
- ток фазы ротора ![]() (62)
(62)
- мощность, передаваемая в ротор через зазор, ![]() (63)
(63)
- потери в стали ![]() (64)
(64)
- потери в обмотках статора и ротора ![]() ,
, ![]() (65)
(65)
- дополнительные потери при нагрузке  , зависящие от величины PLL,N при
номинальной нагрузке, назначенной согласно 8.2.2.5.3, измеренной согласно 8.2.2.5.2 или определенной согласно 8.2.2.5.4.
, зависящие от величины PLL,N при
номинальной нагрузке, назначенной согласно 8.2.2.5.3, измеренной согласно 8.2.2.5.2 или определенной согласно 8.2.2.5.4.
Суммарные потери рассчитываются по формуле
PT = Ps + Pfe + Pr + PLL + Pfw. (66)
Поскольку входная мощность и мощность на валу равны соответственно
![]() , Р2 = Р1 - РТ, то
нарушение баланса мощностей должно быть исправлено повторением расчета тока и
потерь до тех пор, пока Р2 для двигательного
режима или Р1 для
генераторного режима не будет обеспечивать баланс.
, Р2 = Р1 - РТ, то
нарушение баланса мощностей должно быть исправлено повторением расчета тока и
потерь до тех пор, пока Р2 для двигательного
режима или Р1 для
генераторного режима не будет обеспечивать баланс.
КПД в двигательном режиме рассчитывается по формуле
![]() (67)
(67)
8.2.2.5 Добавочные потери от нагрузки
8.2.2.5.1 Испытание под нагрузкой с измерением вращающего момента
8.2.2.5.1.1 Остаточные потери PLr
Остаточные потери определяются для каждой нагрузки путем вычитания из потребляемой мощности отдаваемой мощности, потерь в обмотках статора, потерь в стали, потерь трения и вентиляционных, а также потерь в обмотках ротора, соответствующих определенному скольжению
PLr = P1 - P2 - Ps - Pr - Pfe - Pfw, P2 = 2πTn, (68)
где P1, T и n определяются согласно 6.4.4.2;
Ps определяются согласно 8.2.2.4.1.2;
Pfe определяются согласно 8.2.2.3.3;
Рfw определяются согласно 8.2.2.3.2;
Рr определяются согласно 8.2.2.4.1.3.
8.2.2.5.1.2 Сглаживание данных по остаточным потерям
Экспериментальные значения остаточных потерь должны быть аппроксимированы прямой с использованием линейного регрессионного анализа (см. рисунок 10), зависимости потерь от квадрата вращающего момента рассчитываются по формуле
PLr = AT2 + B, (69)
где T определяется согласно 8.2.2.5.1.1;
А и В - постоянные, определяющиеся согласно 6.4.4.2 и 8.2.2.5.1.1 по минимум шести экспериментальным точкам при различной нагрузке с использованием следующих уравнений:
 (70)
(70)
![]() (71)
(71)
где i - номер суммируемых экспериментальных точек при изменении нагрузки.

Рисунок 10 - Аппроксимация экспериментальных значений остаточных потерь
Коэффициент корреляции рассчитывается по формуле
 (72)
(72)
Если γ менее 0,95, следует удалить наихудший результат и повторить процедуру построения регрессии. Если при этом произойдет увеличение γ до 0,95 и выше, используется вторая регрессия; если нет - испытание нельзя признать удовлетворительным по причине инструментальных или процедурных погрешностей. Источник ошибки должен быть проанализирован и устранен, и испытание согласно 6.4.4.2 должно быть повторено.
8.2.2.5.1.3 Добавочные потери под нагрузкой PLL
Когда постоянная А установлена, величина добавочных потерь под нагрузкой для каждого значения нагрузки рассчитывается по формуле
PLL = AT2, (73)
где A и T определяются согласно 8.2.2.5.1.2.
8.2.2.5.2 Испытание с вынутым ротором и обратным вращением поля
Результаты измерений согласно 6.4.5.4 мощностей статора Р1,rm и Р1,rr, а также мощность вала (PD,rr - P0,rr) с применением процедуры регрессионного анализа с логарифмической связью токов и мощностей приводятся к следующим соотношениям:
P1,rm = ArmIN1 + BL,rm; P1,rr = ArrIN2 + BL,rr; (PD,rr - P0,rr) = АD,rrIIN3 + BD,rr.
Сглаженные значения мощностей, таким образом, будут следующими:
P1,rm = ArmIN1; P1,rr = ArrIN2; (PD,rr - P0,rr) = АD,rrIIN3.
Если данные получены правильно, соотношения между мощностью и током имеют квадратичный характер.
Добавочные потери под нагрузкой рассчитываются по формуле
PLL = PLL,rm + PLL,rr. (74)
Для каждого значения тока добавочные потери на основной частоте рассчитываются по формуле
PLL,rm = P1,rm - 3I2Rs,rm, (75)
где Rs,rm - сопротивление фазы статора, приведенное к средней температуре θw,rm;
PLL,rr = (PD,rr - P0,rr) - (P1,rr - PLL,rm - 3I2Rs,rr) - высокочастотные потери.
Дополнительные потери под нагрузкой в требуемом режиме работы могут быть определены путем выполнения следующих процедур:
а) приблизительная величина тока нагрузки INL, соответствующая номинальной величине линейного тока статора, рассчитывается по формуле
![]() (76)
(76)
где IN - номинальная величина линейного тока статора;
I0 - величина тока статора холостого хода.
б) для тока нагрузки INL номинальная величина добавочных потерь под нагрузкой PNLL рассчитывается по формуле
![]() (77)
(77)
в) величина тока нагрузки IL в любом режиме рассчитывается по формуле
![]() (78)
(78)
где I - линейный ток статора в данном режиме.
г) добавочные потери под нагрузкой PLL в данном режиме рассчитываются по формуле
 (79)
(79)
8.2.2.5.3 Приближенная оценка добавочных потерь по мощности
Величина добавочных потерь PLL при номинальной нагрузке может быть определена в зависимости от потребляемой мощности Р1 с помощью графика, показанного на рисунке 11.
Для асинхронных машин приведенный график описывается следующими формулами
для Р2 ≤ 1 кВт PLL = 0,025P1, (80)
для 1 кВт < Р2 < 10000 кВт PLL = Р1[0,025 - 0,005logР2/1 кВт], (81)
для Р2 ≥ 10000 кВт PLL = 0,005P1. (82)
Для нагрузок, отличных от номинальных, можно считать, что дополнительные потери под нагрузкой определяются разностью квадратов первичного тока и тока без нагрузки.
Примечание - Данный метод дает результат, превышающий, как правило, результаты более точных методов оценки добавочных потерь согласно 8.2.2.5.1 или 8.2.2.5.2.
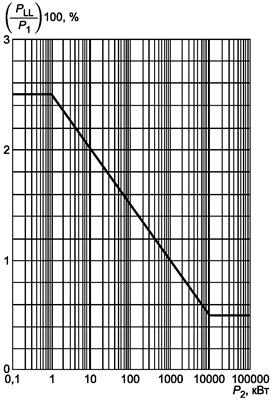
Рисунок 11 - График для определения добавочных потерь
8.2.2.5.4 Испытание по схеме «звезда»
8.2.2.5.4.1 Определение промежуточных величин
При каждом испытании согласно 6.4.5.5 определяются промежуточные величины по уравнениям в соответствии с приложением Б.
8.2.2.5.4.2 Сглаживание данных добавочных потерь под нагрузкой
Данные потери под нагрузкой должны быть аппроксимированы методом линейного регрессионного анализа. Потери должны быть выражены как функция квадрата тока обратной последовательности Ii(2) относительно тока It согласно 6.4.5.5:
 (83)
(83)
А и В должны быть вычислены по процедуре, описанной в 8.2.2.5.1.2. Когда коэффициент A будет определен, величина дополнительных потерь при номинальной нагрузке рассчитывается по формуле
PLL = AT2. (84)
9 Определение КПД синхронных машин
9.1 Определение КПД прямым методом измерений
9.1.1 Определение КПД по вращающему моменту
При испытании согласно 6.3.1 КПД рассчитывается по формуле
![]() (85)
(85)
где потребляемая Р1 и отдаваемая Р2 мощности определяются в соответствии с 6.3.1.1:
- в двигательном режиме работы Р1 = Реl; Р2 = Pmech;
- в генераторном режиме работы Р1 = Pmech; Р2 = Реl;
Pel, Т и n измеряются в соответствии с 6.3.1.2 и 6.3.1.3;
Pmech = 2πTn/30;
Р1Е определяется в соответствии с 3.4.3.4 и 6.2.
Примечание - Потери в цепи возбуждения, не покрываемые мощностью Р1Е, покрываются со стороны вала.
9.1.2 Измерение в двухмашинном агрегате при питании от двух сетей
Если две соединенные машины работают в номинальных условиях, КПД должен быть рассчитан, исходя из учета половины суммарных потерь и средней потребляемой мощности двигателя и генератора, по формуле
 (86)
(86)
где РТ, Р1Е рассчитываются по формулам
![]() (87)
(87)
![]() (88)
(88)
где Р1 и Р2 определяются в соответствии с 6.3.2;
Р1Е определяется в соответствии с 3.4.3.4 и 6.2.
9.2 Определение КПД методами косвенных измерений
9.2.1.1 Измерение в двухмашинном агрегате при питании от одной сети
Если две соединенные машины работают в номинальных условиях, КПД должен быть рассчитан, исходя из учета половины суммарных потерь каждой машины, по формуле
![]() (89)
(89)
где РТ - полные потери, определяются как половина общей суммы поглощенной мощности
![]()
РМ - мощность, потребляемая машиной, работающей в двигательном режиме (без учета мощности возбуждения), определяемая в соответствии с 6.4.1.1;
Р1Е -
мощность, создаваемая отдельным источником, для синхронных машин измерена в
соответствии с 6.4.1.1.4, ![]()
9.2.1.2 Испытание с нулевым коэффициентом мощности
Для каждого значения нагрузки рассчитывается КПД в соответствии с 6.4.1.2:
![]() (90)
(90)
где Р1 рассчитывается по формуле
![]() (91)
(91)
где Р1 - мощность, потребляемая обмотками якоря;
РТ - суммарные потери, включая потери возбуждения.
Суммарные потери определяются в зависимости от типа возбуждения:
а) для машин с типом возбуждения в) и г) в соответствии с 3.4.3.3 по формуле
PT = P1,zpf + Pfe + Pe, (92)
Ре должна быть определена в соответствии с 6.2 с приведением сопротивления обмотки возбуждения к нормативной температуре:
![]()
 (93)
(93)
где P1, zpf - мощность, равная Р1 в соответствии с 6.4.1.2;
Re - сопротивление обмотки в нагретом состоянии;
Re, 0 - сопротивление обмотки при температуре θ0;
Iе - ток в обмотке возбуждения, определенный по МЭК 60034-4 (см. также 6.4.1.2);
Iе, zpf - ток в обмотке возбуждения при испытании с нулевым коэффициентом мощности;
θw - температура обмотки возбуждения при испытании с нулевым коэффициентом мощности;
θc - температура охлаждающей жидкости при испытании с нулевым коэффициентом мощности;
θе - температура обмотки возбуждения, приведенная к току Iе;
ΔPfe - потери в стали, приведенные ниже;
б) для машин с типом возбуждения а) и б) по 3.4.3.3:
РT, Ре, РEd и P1E должны быть определены в соответствии с 6.2 из испытания по 6.4.3.3 для тока в обмотке возбуждения при требуемой нагрузке. Согласно МЭК 60034-4 (см. также 6.4.1.2) они рассчитываются по формулам:
PT = P1,zpf + P1E,zpf + ΔPfe + Pe. (94)
Pe = Pf + PEd - Pf,zpf - PEd,zpf. (95)
где Р1,zpf, Pf,zpf и Р1Е,zpf - значения, полученные в результате испытания по 6.4.1.2;
Pf - потери в обмотке возбуждения, найдены для машин с независимым возбуждением;
PEd, PEd,zpf - значения, полученные при испытании по 6.4.3.3 для Iе, Re и Iе,zpf, Re,zpf;
ΔPfe находится из зависимости потерь в стали от напряжения по 6.4.2.3 и вычисляется по разности значений потерь в стали Pfe для двух значений электродвижущей силы ЭДС: при заданной нагрузке и при испытании с нулевым коэффициентом мощности.
Примечание - Уравнения приведены для работы в двигательном режиме.
9.2.2 Суммирование составляющих потерь
9.2.2.1 Определение КПД
КПД рассчитывается по формуле
![]() (96)
(96)
где Р1 - потребляемая мощность, без учета мощности цепи возбуждения, питающейся от отдельного источника;
Р1Е - мощность цепи возбуждения, питающейся от отдельного источника,
РТ - суммарные потери согласно 9.2.2.2;
Р2 - отдаваемая мощность.
Примечание 1 - Как правило, первое выражение чаще используется для двигателя, а второе - для генератора.
Примечание 2 - Суммарные потери РТ включают мощность возбуждения Ре (см. 6.2) машины, когда это возможно.
9.2.2.2 Суммарные потери
Суммарные потери, включая потери в цепи возбуждения, рассчитываются по формуле
PT = Pc + Ps + PLL + Pe, (97)
где Рс - постоянные потери, определяются в соответствии с 9.2.2.3,
Ps - потери в обмотке статора, определяются в соответствии с 9.2.2.5;
PLL - дополнительные потери от нагрузки, определяются в соответствии с 9.2.2.6;
Ре - потери в цепи возбуждения, определяются в соответствии с 9.2.2.4.
9.2.2.3 Постоянные потери
9.2.2.3.1 Общие сведения
Для каждого значения напряжения, заданного в 6.4.2.3, постоянные потери рассчитываются по формуле
Pc = P0 - Ps, (98)
где ![]()
Р0, I0 и R11,0 - значения мощности, тока и линейного сопротивления, определенные в соответствии с 6.4.2.3.
Для машин с бесщеточными возбудителями потери в цепи возбуждения рассчитываются по формуле
Рс = Р0 - Рs - Рf,0 - РЕd + Р1Е, (99)
где Pf,0 - потери в обмотке возбуждения на холостом ходу;
PEd - потери в возбудителе согласно 6.4.3.3 для соответствующих значений Ue и Iе при испытании,
Р1Е - мощность согласно 6.2 для соответствующих значений Ue и Iе при испытании.
9.2.2.3.2 Потери на трение и вентиляционные
При испытании без нагрузки по 6.4.2.3 для значений напряжения U0, при которых отсутствует заметное насыщение, строится зависимость постоянных потерь Рс от U02, которая экстраполируется прямой линией до пересечения с осью потерь. Точка пересечения соответствует потерям трения и вентиляционным Рfw.
Примечание - Предполагается, что найденные потери трения и вентиляционные постоянны при любом значении нагрузки.
9.2.2.3.3 Потери в стали
Для каждого значения напряжения по 6.4.2.3 строится кривая постоянных потерь в функции напряжения. Для получения потерь в стали необходимо из значения постоянных потерь вычесть потери трения и вентиляционные Pfe = Рс - Рfw.
9.2.2.4 Потери в цепи возбуждения
9.2.2.4.1 Общие сведения
Для каждого значения нагрузки потери в цепи возбуждения рассчитываются по формуле
Ре = Рf + РEd + Рb, (100)
где PEd и Pf - потери в возбудителе и потери в цепи возбуждения, определяются согласно 9.2.2.4.2 и 9.2.2.4.3;
Рb - потери в щеточном узле, определяемые по 9.2.2.4.4, когда имеются щетки.
9.2.2.4.2 Испытание под нагрузкой
Pf - потери в цепи возбуждения, определяются в соответствии с 6.4.3.1;
PEd - потери в возбудителе, определяются в соответствии с 6.4.3.3;
РEd = 2πn(TЕ - TЕ,0) + Р1Е - Рf.
9.2.2.4.3 Испытание без нагрузки
Pf - потери в обмотке возбудителя, определяются в соответствии с 6.4.3.2;
PEd - потери в возбудителе, определяются в соответствии с 6.4.3.3.
Для синхронной машины с независимым возбудителем потери в цепи возбуждения Pf определяются по значениям напряжения Ue и тока Iе за вычетом потерь в щетках Рb в соответствии с 9.2.2.4.4.
9.2.2.4.4 Электрические потери в щеточном узле
Потери в щетках рассчитываются по формуле
Pb = 2UbIe, (101)
где Ub - справочное падение напряжения на щетке в зависимости от ее типа:
1,0 В - для угольных, электрографитных или графитных щеток;
0,3 В - для металлоуглеродных щеток;
Iе - значение тока, соответствующее полученному при испытании под нагрузкой по 6.4.3.1 или вычисленному по 6.4.3.2.
9.2.2.5 Потери под нагрузкой
9.2.2.5.1 Испытание под нагрузкой
При каждой нагрузке потери в обмотке статора рассчитываются по формуле
Ps = 1,5I2R11, (102)
где I - ток статора, определяется в соответствии с 6.4.4.1;
R11 - среднее значение линейного сопротивления обмотки, определяется в соответствии с 6.4.4.1 и приводится к номинальной температуре хладагента 25 °С.
9.2.2.5.2 Испытание без нагрузки
Потери в обмотке статора рассчитываются по формуле
Ps = 1,5I2R11, (103)
где I - ток статора, определенный для заданной нагрузки;
R11 - измеренное среднее значение линейного сопротивления обмотки, приводится к номинальной температуре хладагента 25 °С в соответствии с 5.7.2.
9.2.2.6 Дополнительные потери под нагрузкой PLL
9.2.2.6.1 Испытание в двухмашинном агрегате
Дополнительные потери под нагрузкой при номинальном токе рассчитываются по значению подведенной мощности при коротком замыкании в соответствии с 6.4.5.6.1 за вычетом потерь на трение и вентиляционных Рfw (см. 9.2.2.3.2) и потерь от нагрузки при номинальном токе (см. 9.2.2.5.1 или 9.2.2.5.2) по формуле
PLL,N = 2πnT/60 - Pfw - Ps, (104)
где Т и n - вращающий момент и частота вращения машины, вычисляются в соответствии с 6.3.1.2.
Для машин с бесщеточным возбудителем потери рассчитываются по формуле
PLL,N = 2πnT/60 + Р1Е - Рfw - Рs - Рf - РEd, (105)
где Pf - потери в обмотке возбуждения в соответствии с 6.2;
PEd - потери в возбудителе в соответствии с 6.4.3.3.
Для отличных от номинального значений нагрузки дополнительные потери рассчитываются по формуле
PLL = PLL,N(I/IN)2. (106)
9.2.2.6.2 Испытание на холостом ходу с пониженным напряжением
Дополнительные потери под нагрузкой определяются по 6.4.5.6.2.
Дополнительные потери для каждого значения тока якоря определяются вычитанием из потребляемой мощности (см. 6.4.5.6.2) постоянных потерь Рс (см. 9.2.2.3) и потерь в обмотке статора Ps (см. 9.2.2.5.1) по формуле
PLL = P1 - Pc - Ps. (107)
Приложение А
(обязательное)
Коррекция результатов динамометрического измерения вращающего момента
Примечание - Данный метод коррекции применяется при наличии подшипников между устройством измерения вращающего момента и валом двигателя.
А.1 Коррекция по результатам испытания двигателя на холостом ходу
А.1.1 Динамометр присоединен к двигателю
Двигатель, соединенный с отключенным от питания динамометром, работает при номинальном напряжении и частоте. Регистрируются значения потребляемой мощности Pd,0, тока Id,0, скорости n, сопротивления Rd,0 или температуры θ (если R измеряется в ходе испытания) и показания динамометра Td,0.
Определяются скольжение s и мощность потерь в якорной цепи Pd, которая рассчитывается по формуле
Pd = (I2R)d,0 = 1,5I2d,0Rd,0. (A.1)
А.1.2 Динамометр отсоединен от двигателя
Двигатель, отсоединенный от динамометра, работает при номинальном напряжении и частоте. Регистрируются значения потребляемой мощности Р0, тока I0 и сопротивления R0 или температуры θ (если R измеряется в ходе испытания).
Мощность потерь в якорной цепи Ps рассчитывается по формуле
![]() (А.2)
(А.2)
А.1.3 Коррекция результатов измерения динамометром
Корректирующее значение показаний динамометра Tс, Н ∙ м, рассчитывается по формуле
![]() (A.3)
(A.3)
где n, Pd,0, Pd,s и Td,0 - частота вращения, потребляемая мощность, потери рассеяния в цепи якоря и вращающий момент определяются согласно А.1.1;
Р0 и Ps - потребляемая мощность и потери в якоре определяются согласно А.1.2;
Pfe - потери в стали определяются согласно с 8.2.2.3.3.
Примечание - На практике вращающий момент Td часто компенсируется калибровкой динамометра, состоящей в том, что показания динамометра устанавливаются на 0 при моменте на валу, равном 0.
А.2 Коррекция по результатам испытания с отсоединенным двигателем
Испытуемый двигатель отсоединен, а соединительное устройство остается на валу динамометра. Динамометр работает в качестве двигателя с внешним охлаждением, если это возможно. Корректирующий момент Tс равен измеренному вращающему моменту при той же скорости n, что и при испытаниях под нагрузкой.
Примечание - Это испытание невозможно при нагрузочных устройствах, действующих только в тормозных режимах, например при использовании электромагнитных тормозов.
Приложение Б
(обязательное)
Расчеты для метода соединения «звезда»
По результатам испытаний значения напряжений и токов рассчитываются по формулам:
![]() (Б.1)
(Б.1)
![]() (Б.2)
(Б.2)
![]() (Б.3)
(Б.3)
![]() (Б.4)
(Б.4)
![]() (Б.5)
(Б.5)
![]() (Б.6)
(Б.6)
Примечание - В приведенном выше уравнении предполагается, что текущее значение IW находится в фазе с напряжением UWU. Если же сопротивление резистора содержит значительную реактивную составляющую, должны быть применены следующие формулы:
![]() (Б.7)
(Б.7)
где Reh - измеренное значение резистивного компонента;
![]() (Б.8)
(Б.8)
![]() (Б.9)
(Б.9)
![]() (Б.10)
(Б.10)
![]() (Б.11)
(Б.11)
![]() (Б.12)
(Б.12)
![]() (Б.13)
(Б.13)
Вектора внутренних линейных напряжений по комплексным линейным напряжениями токам рассчитываются по формулам:
![]() (Б.14)
(Б.14)
![]() (Б.15)
(Б.15)
![]() (Б.16)
(Б.16)
Линейные компоненты разделяются на прямую и обратную
последовательности ![]() и рассчитываются по формулам:
и рассчитываются по формулам:
![]() (Б.17)
(Б.17)
![]() (Б.18)
(Б.18)
Прямые и обратные последовательности внутренних фазных напряжений рассчитываются по формулам:
![]() (Б.19)
(Б.19)
![]() (Б.20)
(Б.20)
Внутренние асимметричные фазные напряжения рассчитываются по формулам:
![]() (Б.21)
(Б.21)
![]() (Б.22)
(Б.22)
![]() (Б.23)
(Б.23)
Эквивалентное сопротивление потерь в стали рассчитывается по формуле
![]() (Б.24)
(Б.24)
где Ut - напряжение при испытании, определяется согласно 6.4.5.5,
Pfe - потери в стали, определяются согласно 8.2.2.3.3.
Токи в стали рассчитываются по формулам:
![]() (Б.25)
(Б.25)
![]() (Б.26)
(Б.26)
![]() (Б.27)
(Б.27)
Входные фазные токи рассчитываются по формулам:
![]() (Б.28)
(Б.28)
![]() (Б.29)
(Б.29)
![]() (Б.30)
(Б.30)
Прямые и обратные последовательности входных фазных токов рассчитываются по формулам:
![]() (Б.31)
(Б.31)
![]() (Б.32)
(Б.32)
Для достижения удовлетворительных результатов абсолютная величина тока прямой последовательности Ii(1) должна составлять менее 30 % от абсолютной величины тока обратной последовательности Ii(2). Если это условие не выполняется, то испытание должно быть повторено при другой величине Reh.
Мощность в зазоре рассчитывается по формулам:
![]() (Б.33)
(Б.33)
![]() (Б.34)
(Б.34)
Дополнительные потери под нагрузкой рассчитываются по формуле
PLr = k[(1 - s)Pδ(1) - Pδ(2)) - Pfw, (Б.35)
где ![]()
Приложение
В
(обязательное)
Системы возбуждения с точки зрения определения потерь разделяются на следующие типы:
а) возбудитель на валу машины
Электромашинный возбудитель приводится во вращение валом основной машины напрямую или через механическую передачу. Если в качестве основной машины используется синхронная, энергия возбуждения подводится к обмотке через контактные кольца и щетки;
б) бесщеточный возбудитель
Возбудитель переменного тока без контактных колец и щеток, находящийся на валу основной синхронной машины, обеспечивает энергией обмотку возбуждения через выпрямитель. В качестве возбудителя может использоваться синхронный генератор или асинхронная машина.
Энергия возбуждения синхронного возбудителя поступает как от непосредственно соединенного возбудителя переменного тока с возбуждением от постоянных магнитов, так и от вспомогательной (вторичной) обмотки, заложенной в пазы статора основной машины (как в типе д)), либо от статического преобразователя.
Асинхронный возбудитель питается от сети переменного тока;
в) независимый электромеханический возбудитель.
Генератор постоянного или переменного тока как часть мотор-генераторной установки снабжает энергией обмотку возбуждения основной машины;
г) статический возбудитель.
Обмотка возбуждения основной машины питается от статического источника, например от батареи или через преобразователь от отдельного источника;
д) возбуждение от дополнительной обмотки.
Энергия возбуждения для генератора переменного тока поступает от дополнительной (вторичной) обмотки, размещенной в пазах статора основной машины. При этом используется поток основной или высших гармоник, наводящий электродвижущую силу, которая через выпрямитель, щетки и контактные кольца подается на обмотку возбуждения.
Приложение Г
(обязательное)
Дополнительные методы испытаний
Г.1 Общие сведения
В настоящий МЭК 60034-2-1 не включены следующие процедуры испытаний МЭК 60034-2:1972 с поправками 1:1995 (определение МЭК 60034-2А:1974, раздел 17) и 2:1996:
- испытание методом тарированной машины;
- испытание методом торможения;
- калориметрический метод.
Эти методы, как правило, применяются в основном при проведении испытаний крупных машин, стоимость данных методов при этом весьма велика. Они будут включены в МЭК 60034-2-2, находящийся на стадии рассмотрения. Данное приложение содержит положения о сохранении этих методов как нормативных. После публикации МЭК 60034-2-2, предусматривающего пересмотр данных методов, это приложение прекратит действие.
Г.2 Испытание методом тарированной машины
Г.2.1 Определение
Метод тарированной машины - испытание, при котором механические величины испытуемой электрической машины рассчитываются из электрических величин тарированной машины, механически соединенной с испытуемой.
Машина, потери которой должны быть измерены, отключается от сети, отсоединяется от других машин, если это необходимо, и механически соединяется с тарированной машиной, вращающей испытуемую с номинальной скоростью. Для тарированной машины должны быть известны скорость, мощность на валу, потребляемая электроэнергия, а также ее потери. Механическая мощность, передаваемая тарированной машиной на вал испытуемой, является мерой потерь в условиях, при которых производится испытание. Для раздельного определения потерь по видам тестируемая машина может быть нагружена или нет, возбуждена или нет, быть со щетками или без них, или короткозамкнута.
Как вариант, тарированная машина может быть заменена динамометром или любым другим двигателем, приводящим в движение испытуемую машину, при этом механическое соединение должно включать измеритель момента, позволяющий определить мощность, передаваемую испытуемой машине.
Г.2.3 Определение КПД
Когда двигатель работает в соответствии с условиями Г.2.2 при номинальной скорости, напряжении и токе, КПД определяется как соотношение между отдаваемой и потребляемой мощностью.
Измерения должны проводиться в конце испытания при достижении двигателем температуры, как можно более близкой к установившейся. Коррекция температуры обмотки не делается.
Примечание - В пункте Г.2 повторяются требования разделов 4.4 и 13 МЭК 60034-2:1972, а также 7.3.2, 9.3.2 и 11.3.2 МЭК 60034-2, поправка 1:1995.
Г.3 Испытание методом торможения
Г.3.1 Определение
Метод торможения - такой метод испытания, при котором потери в машине выводятся из анализа процесса торможения машины, если иных потерь нет.
Метод торможения может быть использован для определения различных составляющих потерь вращающихся электрических машин.
Методы определения потерь, представленные в данном разделе, в основном предназначены для мощных синхронных двигателей, однако используемые принципы могут также применяться для других двигателей, например асинхронных и двигателей постоянного тока, имеющих значительный момент инерции.
Метод торможения используется для определения:
- суммы потерь трения и вентиляционных (механических потерь) в машинах всех типов;
- суммы потерь в активных частях магнитопровода и добавочных потерь холостого хода в машинах постоянного тока и синхронных;
- суммы потерь I2R в рабочих обмотках и добавочных потерь под нагрузкой (потерь короткого замыкания) в синхронных двигателях.
Г.3.2 Общие положения
Г.3.2.1 Теоретические основы
В общем случае потери Pt, которые тормозят машину, пропорциональны произведению частоты вращения, которой эти потери соответствуют, и производной этой частоты и рассчитываются по формуле
![]() (Г.1)
(Г.1)
где Pt - общие потери в ходе торможения.
Если частота вращения n выражена в об/мин, а Рt в кВт, то постоянная торможения С рассчитывается по формуле
![]() (Г.2)
(Г.2)
где J - момент инерции, кг ∙ м2.
Замедление dn/dt можно получить либо непосредственно с помощью акселерометра, либо косвенно одним из методов, описанных ниже в Г.3.2.2, Г.3.2.3 и Г.3.2.4.
Г.3.2.2 Метод хорды
Этот метод требует измерения интервала времени (t2 - t1), в течение которого частота испытуемого двигателя изменяется от nN(1 + δ) до nN(1 - δ) (см. рисунок Г.1). Отношение приращения скорости 2δnN к интервалу времени t2 - t1 соответствует примерной величине замедления при номинальной частоте вращения и рассчитывается по формуле
![]() (Г.3)
(Г.3)
где δ - относительное отклонение частоты вращения n от номинальной nN.
Значение δ не должно быть больше 0,1, но может быть меньше в зависимости от характеристики машины.

Рисунок Г1 - Метод хорды
Г.3.2.3 Метод предельных секущих
Метод предельных секущих - разновидность метода хорды, предназначенный для применения в тех случаях, когда частота вращения не может быть увеличена выше номинальной. Момент времени, когда частота вращения равна номинальной nN, обозначен t1, а момент времени, на котором скорость вращения приобретает значение nN(1 - δ), обозначен t2. Отклонение δ постоянно уменьшается, а производная скорости вращения это - предел тангенса угла к линии, проходящей через точки t1 и t2 по оси времени при стремлении δ к нулю (см. рисунок Г.2):
![]()

Рисунок Г.2 - Метод предельных секущих
Г.3.2.4 Метод средней скорости вращения
Если t1, t2 и t3 представляют последовательные моменты времени измерения N полных оборотов вала в интервале времени между любыми двумя последующими измерениями, то среднее значение частоты вращения в течение каждого интервала должно быть рассчитано по формулам:
![]() (Г.4)
(Г.4)
![]() (Г.5)
(Г.5)
где N - число полных оборотов за интервал измерения;
![]() ,
, ![]() -
средние значения частоты вращения на интервалах измерения.
-
средние значения частоты вращения на интервалах измерения.
Ускорение вала dn/dt в промежуточный момент времени t2 является отрицательной величиной, означая, по существу, замедление и составляет
![]() (Г.6)
(Г.6)
Расчетные значения замедления направлены против среднего значения частоты вращения. Значение замедления при номинальной частоте вращения определяется из кривой (см. рисунок Г1 или Г2).
Г.3.3 Проведение испытаний методом торможения
Г.3.3.1 Испытание с известным моментом инерции
Если момент инерции вращающихся машин известен из измерений или расчета, для машин постоянного тока достаточно двух испытаний на торможение: машина работает невозбужденной и машина работает на холостом ходу при номинальном напряжении возбуждения и частоте вращения, близкой к номинальной. Для синхронных двигателей должно быть дополнительно проведено третье испытание - торможение с короткозамкнутой обмоткой якоря и установленной с помощью возбуждения номинальной величиной тока обмотки якоря.
Первое испытание дает механические (трение и вентиляция) потери Pfw испытуемого двигателя и рассчитывается по формуле
![]() (Г.7)
(Г.7)
где С - постоянная торможения;
nN - номинальная частота вращения.
Второе испытание дает суммарные механические потери Рfw и потери в стали Pfe и рассчитывается по формуле
![]() (Г.8)
(Г.8)
Третье испытание дает сумму механических потерь Рfw и потери короткого замыкания Pk и рассчитывается по формуле
![]() (Г.9)
(Г.9)
В приведенных выше формулах
![]() ,
, ![]() ,
, ![]() -
производные частоты вращения по времени в первом, втором и третьем испытаниях,
определяемые по Г.3.2.2, Г.3.2.3 или Г.3.2.4.
-
производные частоты вращения по времени в первом, втором и третьем испытаниях,
определяемые по Г.3.2.2, Г.3.2.3 или Г.3.2.4.
Потери в стали Pfe определяются как разница потерь, полученных во втором и первом испытаниях.
Сумма I2R потерь и добавочных потерь в цепи якоря определяется как разница потерь, измеренных в третьем и первом испытаниях. Разделение этой суммы на компоненты, в случае необходимости, производится путем вычета из суммы I2R потерь в цепи якоря, которые рассчитываются по зависимости сопротивления цепи обмотки от температуры. Для этого температура обмотки должна быть измерена соответствующим методом непосредственно после каждого испытания с короткозамкнутой обмоткой.
Г.3.3.2 Испытания с неизвестным моментом инерции
Если момент инерции вращающихся частей машины неизвестен или машина соединена механически с другими вращающимися частями, например турбиной, инерция которой неизвестна, то проводятся дополнительные испытания для определения постоянной торможения С.
В случае, если имеется возможность запустить ненагруженную машину от подходящего по напряжению, числу фаз и частоте источника питания (в случае машин переменного тока), а также может быть измерена подводимая к ней мощность, равная сумме механических потерь Рfw, потерь в стали Pfe (потери цепи якоря I2R в этом случае не учитываются), постоянная торможения С рассчитывается по формуле
 (Г.10)
(Г.10)
Если измерение мощности затруднено из-за несинусоидального питания, в качестве альтернативного варианта может быть произведено измерение энергии за некоторое время работы в стабильном режиме.
В случае, если нет возможности вращать испытуемую машину в качестве двигателя без нагрузки, в дополнение к трем испытаниям, рассматриваемым в Г.3.3.1, проводится еще одно. Испытуемая машина тормозится за счет любых потерь, которые могут быть измерены и имеют тот же порядок, что ожидаемые потери в стали Pfe и потери короткого замыкания Рk. Для этой цели должны быть отдельно измерены потери холостого хода или короткого замыкания в подключенном преобразовательном агрегате. Как вариант, может быть использован возбудитель или вспомогательный генератор, установленный на валу испытуемой машины, если он имеет нагрузку в виде балластного сопротивления.
Если испытуемая машина тормозится за счет потерь холостого хода преобразовательного агрегата (трансформатора в цепи статора синхронного генератора или машины на валу двигателя), а потери короткого замыкания, соответствующие току холостого хода преобразователя, не учитываются, то расчет ведется по формуле
![]() (Г.11)
(Г.11)
где Р - любые добавочные (известные по величине) потери, приводящие к торможению.
Таким образом, постоянная торможения рассчитывается по формуле
 (Г.12)
(Г.12)
Если испытуемая машина тормозится за счет потерь короткого замыкания преобразователя, то не учитываются потери в стали при соответствующем магнитном потоке преобразователя.
В этом случае
![]() (Г.13)
(Г.13)
где Рk - потери короткого замыкания.
Постоянная торможения в данном случае рассчитывается по формуле
 (Г.14)
(Г.14)
Если испытуемая машина тормозится с помощью возбудителя или вспомогательного генератора, нагружаемых с помощью балластного сопротивления, то потери торможения состоят только из механических потерь испытуемой машины Рfw и измеренных нагрузок Р (с учетом КПД нагрузки машины, которая может быть определена из расчетов).
В этом случае
![]() (Г.15)
(Г.15)
и постоянная торможения С рассчитывается по формуле
 (Г.16)
(Г.16)
Во всех приведенных выше формулах замедление dn/dt можно получить либо непосредственно с помощью акселерометра, либо косвенно одним из методов, описанных в Г.3.2.2, Г.3.2.3 и Г.3.2.4.
Г.3.4 Процедура испытания торможением
Г.3.4.1 Режим работы машины во время испытания торможением
Испытуемая машина должна быть полностью подготовлена для нормальных условий работы. Подшипники должны пройти обкатку перед началом испытания. Температура воздуха, насколько это возможно, путем дросселирования охлаждающего потока должна быть приведена к нормальной для измерения вентиляционных потерь. Установившаяся температура подшипников должна соответствовать номинальной, что достигается регулировкой потока охлаждающего воздуха.
Г.3.4.2 Случай соединения испытуемой машины с механизмом
Испытуемую машину, если это возможно, следует отсоединить от присоединенных к ней механизмов. Если отсоединение невозможно, то следует принять все возможные меры к уменьшению механических потерь в таком механизме, например путем его частичной разборки. В случае гидрогенератора следует удалить воду из камеры рабочего колеса турбины и предотвратить возможности как протекания ее со стороны верхнего бьефа, так и подсасывания рабочим колесом турбины со стороны нижнего бьефа. Вращение рабочего колеса в воздухе создает вентиляционные потери, которые могут быть оценены расчетным путем или экспериментально по согласованию с изготовителем генератора или турбины.
Г.3.4.3 Вращение тестируемой машины
В некоторых случаях испытуемая машина может приводиться во вращение тем приводным двигателем, который соединяется с ней при нормальной эксплуатации. Например, таким двигателем может являться турбина, подача воды, на рабочее колесо которой может быть прекращена практически мгновенно. Испытуемая машина приводится во вращение в режиме ненагруженного двигателя при питании от отдельного источника с широко регулируемой частотой вращения. Во всех случаях возбуждение испытуемой машины должно подаваться от независимого источника с точно и быстро регулируемым напряжением. Не рекомендуется использование возбудителя, механически связанного с валом. Это разрешается, когда отклонение скорости δ не превышает 0,05. В любом случае следует учитывать потери в возбудителе, находящемся на валу испытуемого двигателя.
Г.3.4.4 Процедуры, выполняемые до начала испытания
Каждое испытание начинается с проверки, может ли машина быстро разогнаться до частоты вращения п1 > nN(1 + δ). Это необходимо для того, чтобы за время торможения от частоты п1 до частоты вращения, при которой начнется испытание nN(1 + δ), можно было привести машину в соответствующее состояние, а именно:
- отключить машину от источника питания;
- в случае самоторможения с помощью только механических потерь - погасить поле машины;
- в случае самоторможения суммой механических потерь и потерь короткого замыкания - замкнуть выводы обмотки якоря накоротко и возбудить машину до заданного тока короткого замыкания;
- в случае самоторможения потерями в преобразовательном агрегате - после гашения поля подключить преобразователь в заранее подготовленном состоянии (холостого хода или короткого замыкания) и возбудить машину до заданного значения напряжения или тока;
- в случае самоторможения за счет потерь нагрузки возбудителя или вспомогательного генератора, смонтированного на валу машины - поле испытуемой машины гасится и одновременно устанавливается указанная нагрузка.
Во всех случаях, описанных выше, должно пройти достаточно времени от момента отключения питания до начала измерений, чтобы успели закончиться электромагнитные процессы.
В случае самоторможения с суммой механических потерь, потерь в стали и добавочных потерь холостого хода или самоторможения за счет потерь холостого хода преобразователя после отключения источника питания не требуется никаких операций, если возбуждение испытуемой машины соответствует заданному напряжению холостого хода при вращении с номинальной частотой и коэффициентом мощности, равным единице.
Г.3.4.5 Методика испытания торможением
Снятие показаний всех измерительных приборов, применяемых при измерениях тока возбуждения, напряжения холостого хода, тока короткого замыкания, мощности с неизвестным моментом инерции, проводится в момент прохождения частоты вращения через ее номинальное значение.
Измеренные значения напряжения холостого хода и тока короткого замыкания не должны отличаться от установленных значений более чем на ±2 %. Расчетная величина уменьшения скорости за заданное время для каждого из испытаний должна быть скорректирована пропорционально квадрату отношения заранее установленной величины к измеряемой величине.
Г.3.4.6 Программа испытания торможением
Испытания на самоторможение проводятся в виде серии опытов без перерыва, если это возможно. Рекомендуется, чтобы серия опытов начиналась и заканчивалась испытаниями на невозбужденной машине. Если испытания проводятся в два или более приема с остановкой испытуемой машины, то нужно начинать и заканчивать каждую серию опытов с невозбужденной машины.
Испытания могут быть повторены несколько раз при одних и тех же начальных значениях напряжения холостого хода или тока короткого замыкания, например при номинальных значениях или находящихся в пределах от 95 % до 105 % от номинального значения. В первом случае среднее арифметическое значений, полученных во всех измерениях, будет реальным измеренным значением по каждому типу потерь. Во втором случае строится график зависимости измеряемой величины от тока или напряжения. Реально измеренными значениями будут те, которые находятся в точках пересечения номинальных значений напряжения или тока с построенной кривой.
Дополнительные испытания самоторможения, когда момент инерции испытуемой машины неизвестен, должны проводиться при тех же значениях напряжения или тока, которые были получены при проведении опытов холостого хода или короткого замыкания. Если это невозможно, то соответствующие значения должны быть определены из кривых, как указано выше.
Г.3.5 Получение измерений
Г.3.5.1 Методы измерений
Измерения, проводимые в ходе тестов замедления, направлены на получение требуемого значения скорости производной по времени и могут осуществляться одним из трех способов:
а) акселерометрический - прямые измерения замедления в функции времени:
![]()
б) тахометрический - путем определения зависимости скорости от времени:
n = f(t);
с) хронографический - путем определения зависимости углового перемещения вала испытуемой машины от времени:
y = f(t).
Во всех случаях значения измерительных приборов могут быть использованы как с непрерывной, так и с дискретной записью измеренных значений и времени.
Г.3.5.2 Акселерометрический метод
Зависимость замедления от времени для больших машин, имеющих сложные вентиляционные пути, может быть нестабильной. Как следствие этого, мгновенные значения замедления во время прохождения через номинальную скорость могут быть случайными. Таким образом, истинное значение производной скорости может быть определено путем построения графика замедления в зависимости от времени или скорости и с помощью корреляционных методов.
Г.3.5.3 Тахометрический метод
Зависимость частоты вращения от времени получают по результатам измерений. На графике определяются моменты времени, при которых частота приобретает значение, определенное методом хорд или предельных секущих. Разница между временем нижнего и верхнего предела частоты используется для расчета замедления.
Если есть возбудитель или любая другая электрическая машина находится на валу испытуемой машины, то она может быть использована как тахогенератор при условии, что напряжение сигнала не пульсирует с частотой вращения испытуемой машины. Возбуждение должно питаться от стабильного источника постоянного тока, например от аккумулятора.
Если напряжение сигнала будет пульсировать с частотой вращения либо отсутствует тахогенератор, то может быть использована машина постоянного тока, связанная с валом испытуемого двигателя ременной передачей или другими средствами, обеспечивающими плавное вращение.
Измерения частоты вращения могут быть сделаны либо в точные интервалы времени, указанные в соответствующем методе, в этом случае нет необходимости в специальной регистрации времени или сигналов с вала испытуемой машины. Либо измерения проводятся по сигналам с вала испытуемой машины, при этом одновременно должны считываться сигналы времени и частоты, и обычно от 30 до 40 измерений в течение всего испытания вполне достаточно.
При наличии высокой точности измерений измерение скорости вращения может быть заменено измерением мгновенных значений скорости или периодом напряжения испытуемой машины или любой другой машины переменного тока, расположенной на валу; причем одинаковое число пар полюсов обеих машин не обязательно.
Г.3.5.4 Хронографический метод
Счетчики времени могут представлять собой либо аналоговые визуальные индикаторы с непрерывным движением указателя, либо цифровые с печатающими устройствами (электрическими или механическими).
Время измерения должно быть принято в зависимости от сигналов, полученных с вала испытуемой машины либо с каждым полным оборотом, либо известным числом оборотов.
Примечание - Если при использовании тахометрического метода скорость вращения определяется сигналами с вала испытуемой машины, время измерений может быть использовано как для тахометрического, так и для хронографического методов, обеспечивая тем самым взаимную проверку.
В некоторых случаях, когда устройство имеет плавные характеристики замедления, достаточная точность в определении производной частоты вращения может быть получена путем измерения отношения приращения частоты к соответствующему промежутку времени
![]()
Наилучшим способом определения скорости синхронных машин является измерение напряжения и частоты статора.
Г.3.5.5 Измерение потерь в подшипниках
Потери в подшипниках и подпятниках могут быть вычтены из общей суммы механических потерь, если это потребуется. Они могут быть определены с помощью калориметрического метода в соответствии с МЭК 60034-2А. Если испытуемая машина использует прямое охлаждение подшипников, то эти потери распределяются между испытуемой машиной и любыми другими, связанными с ней механически, например турбиной, в зависимости от массы их вращающихся частей. Если нет прямого потока охлаждения, то распределение потерь в подшипниках должно быть определено по эмпирическим формулам на основе соглашения между производителем и покупателем.
Примечание - Пункт Г.3 повторяет пункт 4.7 МЭК 60034-2:1972 и пункт 15 МЭК 60034-2, с поправкой (изменением) 1:1995.
Г.4 Калориметрический метод
Г.4.1 Определение
Метод испытания, в котором потери в машине определяются по выделению тепла в ней. Потери вычисляются как произведение массы теплоносителя и повышения его температуры, а также тепла, рассеянного в окружающую среду.
Примечание - Пункт Г.4.1 повторяет раздел 4.8 МЭК 60034-2:1972.
Г.4.2 Содержание метода
Метод соответствует МЭК 60034-2А:1974 (раздел 17 МЭК 60034-2, с изменением 1:1995).
Приложение ДА
(обязательное)
Сведения о соответствии ссылочных
международных стандартов
ссылочным национальным стандартам Российской Федерации
Таблица ДА.1
|
Обозначение ссылочного международного стандарта |
Степень соответствия |
Обозначение и наименование соответствующего национального стандарта |
|
МЭК 60027-1:1992 |
MOD |
ГОСТ Р 52002-2003 Электротехника. Термины и определения основных понятий |
|
МЭК 60034-1:2004 |
MOD |
ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики |
|
МЭК 60034-2А:1974 |
IDT |
ГОСТ 25941-83 (МЭК 34-2-72, МЭК 34-2А-74) Машины электрические вращающиеся. Методы определения потерь и коэффициента полезного действия |
|
МЭК 60034-4:2008 |
- |
* |
|
МЭК 60034-19:1995 |
- |
* |
|
МЭК 60034-29:2008 |
- |
* |
|
МЭК 60044 (части 1 - 8) |
- |
* |
|
МЭК 60051-1:1997 |
IDT |
ГОСТ 30012.1-2002 (МЭК 60051-1-97) Приборы аналоговые показывающие электроизмерительные прямого действия и вспомогательные части к ним. Часть 1. Определения и основные требования, общие для всех частей |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированные стандарты. |
||
Ключевые слова: машины электрические вращающиеся; методы определения потерь и коэффициента полезного действия; машины постоянного тока, синхронные и асинхронные всех типоразмеров (за исключением машин для подвижного состава)