МИНИСТЕРСТВО
СТРОИТЕЛЬСТВА ПРЕДПРИЯТИЙ
НЕФТЯНОЙ И ГАЗОВОЙ ПРОМЫШЛЕННОСТИ
Всесоюзный
научно-исследовательский институт
по строительству магистральных трубопроводов
![]()

РЕКОМЕНДАЦИИ
ПО ОПРЕДЕЛЕНИЮ ГИБКОСТИ
И НАПРЯЖЕННОГО СОСТОЯНИЯ
КРИВОЛИНЕЙНЫХ УЧАСТКОВ
ТРУБОПРОВОДОВ
Р 526-84

Москва 1984
В Рекомендациях изложена методика определения коэффициента понижения жесткости и коэффициентов интенсификации напряжений криволинейных элементов трубопроводов, плавно сопряженных с прямолинейными участками трубопроводов и находящихся под действием плоского изгиба и внутреннего давления.
Приведен алгоритм программы и контрольный пример расчета.
Программа на машинных носителях хранится в отделе инженерных и сметных расчетов с применением ЭВМ (ОИР) института ЮжНИИгипрогаза (г. Донецк).
Рекомендации разработаны отделом прочности и надежности конструкции магистральных трубопроводов (ОПН) ВНИИСТа совместно с ОИР ЮжНИИгипрогаза и предназначены для специалистов проектных организаций, занимающихся проектированием и расчетом трубопроводов.
Рекомендации составили: кандидаты техн. наук В.П. Черний, А.А. Никитин (ВНИИСТ), инженеры А.С. Крымова, Л.А. Мещерякова, Л.Н. Олейник, В.С. Шевчук (ЮжНИИгипрогаз).
Замечания и предложения направлять по адресу: 105058, Москва, Окружной проезд, 19, ВНИИСТ; г. Донецк, ул. Артема, 169г, ЮжНИИгипрогаз.
|
Министерство строительства предприятий нефтяной и газовой промышленности |
Рекомендации по определение гибкости и напряженного состояния криволинейных участков трубопроводов |
Р 526-84 Впервые
|
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Настоящие Рекомендации разработаны в развитие главы СНиП II-45-75 «Магистральные трубопроводы. Нормы проектирования»;
1.2. В Рекомендациях приведена методика определения гибкости (коэффициента понижения жесткости) и напряженного состояния (коэффициентов интенсификации напряжений) упруго изгибаемых криволинейных элементов трубопроводов с учетом влияния сопряжения их с прямолинейными участками трубопроводов и внутреннего давления.
1.3. На основании разработанной методики составлены алгоритм и программа определения гибкости и напряженного состояния криволинейных участков трубопроводов, реализованные на машинном языке ФОРТРАН-ГУ для ЭВМ ЕС.
2. МЕТОДИКА ОПРЕДЕЛЕНИЯ ГИБКОСТИ И НАПРЯЖЕННОГО СОСТОЯНИЯ КРИВОЛИНЕЙНОГО УЧАСТКА ТРУБОПРОВОДА
Постановка задачи
2.1. Рассматривается криволинейный участок трубопровода (кривая труба) кругового сечения с наружным диаметром Dн, толщиной стенки δ1, длиной L, радиусом кривизны продольной оси ρ и центральным углом φ. Радиус средней линии сечения кривой трубы r = (Dн - δ1) / 2. Кривая труба плавно сопрягается торцами с прямолинейными участками трубопровода (цилиндрическими оболочками) того же наружного диаметра, как указано на рисунке. Толщина стенки прямых труб обозначена через δ2.
|
Внесены ВНИИСТом |
Утверждены
ВНИИСТом |
Срок
введения в действие
|
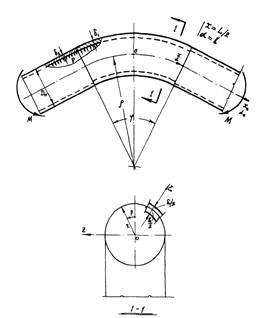
Схема криволинейного участка трубопровода
Плоскости сопряжений труб (торцевые плоскости) ортогональны осям сопрягаемых труб.
2.2. Рассматриваемый участок трубопровода испытывает действие внутреннего давления Р и изгибавшего момента М в плоскости кривизны трубы.
2.3. Деформация кривой трубы рассматривается в безразмерных продольной и угловой координатах α = x / r, β и в натуральной координате ζ, отсчитываемой по нормали от срединной поверхности трубы. Компоненты перемещения произвольной точки срединной поверхности по направлениям координат α, β, ζ обозначаются соответственно через U, V, W.
Прямая труба имеет координаты αц = xц / r, β, ζ.
2.4. Задача состоит в разработке методики определения коэффициента понижения жесткости и коэффициентов интенсификации напряжений при изгибе подобных криволинейных участков трубопроводов.
Основные допущения
2.5. Материал труб однородный изотропный и подчиняется закону Гука.
2.6. Радиус средней линии сечения прямолинейной трубы принимается равным радиусу средней линии сечения кривой трубы.
2.7. Геометрические параметры кривой и прямой труб удовлетворяют условиям
![]()
![]()
Основные принципы решения
2.8. Примыкающие к кривой трубе прямолинейные участки трубопровода ограничивают деформацию контуров торцевых сечений кривой трубы и обусловливают поэтому неравномерное по ее длине сплющивание поперечных сечений при изгибе.
2.9. Компоненты перемещений, деформаций и напряжений по всей длине рассматриваемого криволинейного участка трубопровода, за исключением зон сопряжения труб, определяются только основным медленно изменяющимся напряженным состоянием, к которому применимы гипотезы полубезмоментной теории оболочек В.З. Власова [1]. Решение задачи для основного напряженного состояния основывается на теории изгиба криволинейных труб с подкрепленными краями В.П. Ильина [2]. При рассмотрении условий сопряжения труб учитывается также резкое местное возмущение напряженного состояния (краевой эффект) в зонах сопряжения оболочек.
2.10. Из условий равновесия элемента срединной поверхности криволинейной трубы получаем систему уравнений равновесия, которая на основании работ [2] записывается в виде:
|
|
(1) |
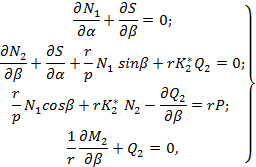
где N1, S ..., Q2 - погонные усилия и моменты, действующие на элемент оболочки;
![]() - кривизна деформированной средней
линии сечения оболочки (æ2 - приращение кривизны в
результате деформации элемента оболочки);
- кривизна деформированной средней
линии сечения оболочки (æ2 - приращение кривизны в
результате деформации элемента оболочки);
Р - внутреннее давление.
2.11. При исключении усилий S, N2, Q2 система (1) сводится к уравнению, содержащему только N1 и М2
N1 и M2 представляются в виде:
где
E - модуль упругости;
µ - коэффициент Пуассона;
ε1 - продольная деформация срединной поверхности присвой трубы;
![]() -
цилиндрическая жесткость.
-
цилиндрическая жесткость.
2.12 Компоненты деформаций ε1 и æ2 выражаются через приращения кривизны оси кривой трубы и перемещения в виде
где æ0 = M / EJ - постоянное по длине трубы приращение кривизны ее оси, определяемое на основании балочной теории сопротивления материалов;
æw - переменное по длине трубы приращение кривизны ее оси, обусловленное сплющиванием поперечных сечений кривой трубы (эффектом Кармана).
2.13 Радиальные перемещения представляются в форме тригонометрического ряда
где
fn = fn (α).
2.14. Используя геометрические соотношения полубезмоментной теории оболочек, остальные перемещения и приращение кривизны æ2 также представляются в виде рядов. Из условия равенства момента внутренних сил относительно оси Z внешнему изгибающему моменту находится зависимость для переменной составляющей приращения кривизны оси трубы
|
|
(6) |
2.15. При использовании в уравнении (2) зависимостей (3, 4) и представлении перемещений в рядах получается
бесконечная система дифференциальных уравнений, записанная ниже для удобства в
координатах ![]() , где ψ1 = δ1
/ r.
, где ψ1 = δ1
/ r.
где
an,m = F(n, λ, ψ1, P)
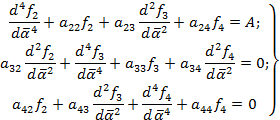
A = -0,12 (ψ1 λ)-1;
λ = ρδ1 / r2 - геометрический параметр кривой трубы;
δ2n - символ Кронекера.
2.16. При сохранении в ряду (5) трех первых членов бесконечная система (7) сводится к системе трех уравнений:
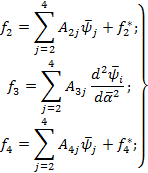
2.17. Решение систем уравнений (8) представляется в виде:
|
|
(10) |

где Ani = F(βi,
an,m) - коэффициенты влияния функций
перемещений ![]() на параметры fn;
на параметры fn;
![]() - частные решения системы уравнений (8);
- частные решения системы уравнений (8);
![]() - четные функции А.Н. Крылова;
- четные функции А.Н. Крылова;
C0j, C2j - произвольные постоянные.
2.18. Корни βi находятся из характеристического уравнения
|
β3 + g1β2 + g2β + g3 = 0, |
(11) |
в котором коэффициенты gi (i = 1, 2, 3) являются функциями от anm.
2.19. Учитывая доминирующее влияние второй гармоники f2cos2β на любой из компонентов напряженно-деформированного состояния при изгибе кривой трубы, в выражениях (9) оставляются только члены с индексом j = 2. В этом случае для определения параметра перемещения f2 применимо уравнение:
где β2 - наименьший по абсолютной величине корень уравнения (11);
![]()
2.20. Параметр перемещения f2 записывается в виде
где
![]()
2.21. Остальные параметры перемещения выражаются аналогичным образом:
где
![]()
2.22. Вид уравнения (12) показывает, что расчетная модель изгибаемой и
находящейся под внутренним давлением кривой трубы условно монет быть
представлена в виде цилиндрической оболочки того же сечения и длины,
находящейся под действием нормальной изменяющейся по закону q cos 2β нагрузки, внутреннего давления Р
и нагруженной дополнительным внутренним давлением некоторой интенсивности ΔР,
величина которой зависит от геометрического параметра кривой трубы λ.
Величина амплитудной нагрузки q соответствует
частному решению ![]() в кривой трубе.
в кривой трубе.
2.23. Указанная аналогия позволяет применить неупрощенные зависимости технической моментной теории тонких оболочек для решения задачи сопряжения кривой и прямой труб. Поэтому далее используются зависимости [1] для цилиндрических оболочек, нагруженных нормальной неосесимметричной нагрузкой. Уравнению (12) в координатах α соответствует разрешающее дифференциальное уравнение 8-го, порядка, записываемое через «функцию перемещений φк:
2.24. Все компоненты перемещений, усилий и моментов выражаются
через функцию ![]() на основании дифференциальных
зависимостей этих компонентов от разрешающей функции Ф, связанной с
на основании дифференциальных
зависимостей этих компонентов от разрешающей функции Ф, связанной с ![]() соотношением
соотношением
![]() .
.
2.25. Решение уравнения (15) записывается в четных функциях А.Н. Крылова в виде
где Ci - произвольные постоянные;
t1, U1 - множители «малых и «больших» корней характеристического уравнения, соответствующего уравнению (15),
![]()
Множитель t1 связан с γ2 отношением
![]() .
.
2.26. Компонента перемещений, усилий и моментов выражаются на основании выражения (16) в функциях А.Н. Крылова. Эти выражения содержат четыре неизвестных произвольных постоянных Ci.
2.27. Записывается также дифференциальное уравнение 8-го порядка для примыкающих к кривой трубе цилиндрических оболочек через функцию перемещений φц:
где
![]() .
.
2.28. Решение уравнения (17) ищется в затухающих функциях
где Ci (i = 5, 6, 7, 8) - произвольные постоянные;
t2, U2 - множители соответственно «малого» и «большого» корней характеристического уравнения, соответствующего дифференциальному уравнению (17).
2.29. Все компоненты перемещений, усилий и моментов в цилиндрической оболочке записываются на основании выражения (18) через затухающие функции и неизвестные Сi.
2.30. Произвольные постоянные Ci (i = 1, 2, 3, … 8) определяются из условий сопряжения торцов криво- и прямолинейных труб для координат α = l и αц = 0;
|
U (l) = Uц (0); V (l) = Vц (0); W (l) = Wц (0); V1 (l) = V1ц (0); S (l) = Sц (0); M1 (l) = M1ц (0); Q1 (l) = Q1ц (0); |
(19) |
2.31. Используя выражения (16) и (18), условия (19) цриводятся к системе восьми алгебраических уравнений с восемью неизвестными Ci:
![]()
2.32. Далее снова используются дифференциальные зависимости
4-го порядка, характеризующие основное напряженное состояние кривой трубы.
Неизвестные ![]() и
и ![]() определяются из условия:
определяются из условия:
где W0(α) и V0(α) - амплитудные величины соответственно нормального и касательного перемещений в сечении.
2.33. Из условия (20) следует:
![]()
![]()
2.34. Найденные значения
неизвестных ![]() и
и ![]() позволяют определять все необходимые
параметры, характеризующие изгиб кривой трубы: перемещения, деформации,
напряжения, коэффициент понижения жесткости.
позволяют определять все необходимые
параметры, характеризующие изгиб кривой трубы: перемещения, деформации,
напряжения, коэффициент понижения жесткости.
2.35. Перемещения точек срединной поверхности кривой трубы находятся на основании соотношений (13), (14). Для продольных деформаций используется формула, следующая из зависимости (4):
|
|
(21) |

2.36. Коэффициент интенсификации продольных напряжений равен наибольшему значению параметра продольных деформаций в центральном сечении кривой трубы:
![]()
Если по расчету получается mк < 1, следует принимать mк = 1.
2.37. Коэффициент понижения жесткости Kж кривой трубы, плавно сопряженной с прямыми трубами, определяется по формуле
|
|
(22) |
где ![]() - нечетные функции А.Н. Крылова;
- нечетные функции А.Н. Крылова;
![]() - параметр длины кривой трубы.
- параметр длины кривой трубы.
2.38. Алгоритмом расчета предусмотрено, что в случае, если
параметр длины кривой трубы удовлетворяет условию ![]() труба считается длинной, неизвестные
труба считается длинной, неизвестные ![]() 0 и все искомые характеристики
гибкости и напряженного состояния трубы определяются по теории Т. Кармана [3] в третьем приближении, т.е. учитывая
2-ю, 4-ю и 6-ю гармоники разложения в ряд.
0 и все искомые характеристики
гибкости и напряженного состояния трубы определяются по теории Т. Кармана [3] в третьем приближении, т.е. учитывая
2-ю, 4-ю и 6-ю гармоники разложения в ряд.
2.39. Формула для определения
коэффициента интенсификации кольцевых напряжений m2к
в алгоритме расчета не приводится, хотя при необходимости его можно определить
как максимум параметра кольцевых деформаций, имеющих место в точках с
координатами: ![]() :
:
|
|
(23) |
Область применения методики
2.40. Изложенная в настоящих Рекомендациях методика определения гибкости и напряженного состояния криволинейных участков трубопроводов предназначена для расчета кривых труб, плавно сопряженных с прямолинейными участками трубопроводов при помощи сварки.
2.41. Методика пригодна для кривых труб, геометрический параметр которых удовлетворяет условию
|
λ ≥ 0,05. |
(24) |
3. РЕАЛИЗАЦИЯ МЕТОДА НА ЭВМ
Описание программ
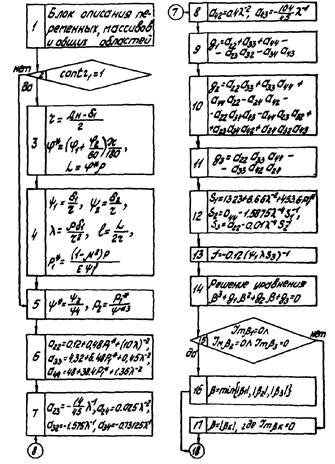
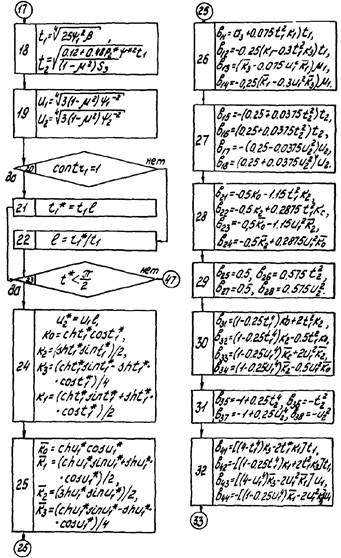
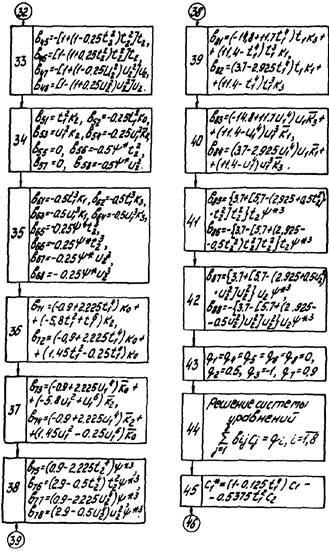
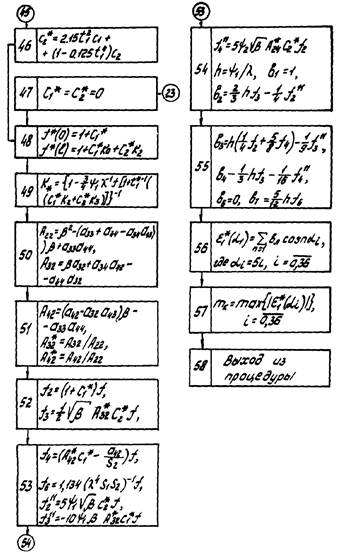
3.1. Блок-схема алгоритма определения гибкости и напряженного состояния криволинейных участков трубопроводов приведена в приложении 1.
3.2. Алгоритм реализован в виде процедуры KRONIN на алгоритмическом языке FORTRAN-IV для ЕС ЭВМ, ОС, версия 6.1.
3.3. Исходные данные и результаты расчета помещены в неименованный блок COMMON.
3.4. Корни β кубического уравнения (11) определяются с использованием стандартной подпрограммы DPOLRT, реализующей итерационный метод Ньютона-Рафсона.
3.5. Для решения системы линейных алгебраических уравнений (19) применяется стандартная подпрограмма DSIMQ, основанная на методе исключения с выбором главного элемента.
3.6. Описание стандартных подпрограмм DPOLRT и DSIMQ приведено в [4].
Исходные данные
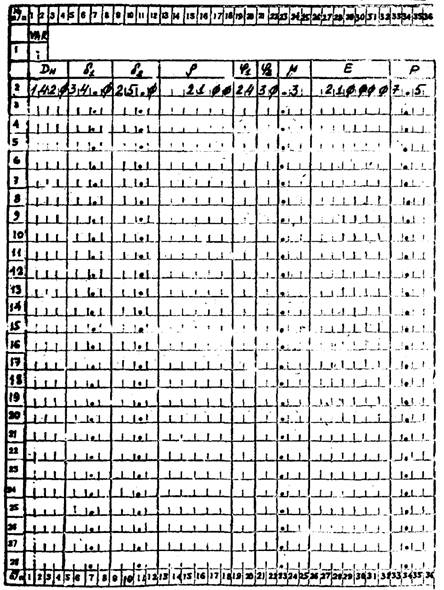
3.7. Исходные данные для расчета заносятся в специально разработанный бланк (см. контрольный пример расчета - приложение 2).
3.8. В первую строку бланка записывается число рассчитываемых вариантов.
3.9. Во вторую и последующие отроки заносятся данные по каждому варианту:
Dн - наружный диаметр трубопровода, мм;
δ1 - толщина стенки кривой трубы, мм;
δ2 - толщина стенки прямой трубы, мм;
ρ - радиус кривизны оси кривой трубы, мм;
φ - центральный угол кривой трубы, град., мин;
µ - коэффициент Пуассона;
E - модуль Юнга, МПа;
Р - внутреннее давление, МПа.
3.10. Форматы вводимых данных приведены на бланке.
Входная информация
3.11. Для контроля заданных исходных данных и правильности их перфорации распечатывается вся исходная информация по заданному варианту.
3.12. Далее следуют результаты вычислений: коэффициент
понижения жесткости; коэффициент интенсификации продольных напряжений;
геометрический параметр кривой трубы; параметр внутреннего давления; параметр
радиального перемещения; малый и большой корни t1 и U1
(блоки 18, 19 блок-схемы); параметр длины кривой трубы; параметр
разностенности; приведенные неизвестные ![]() (блоки 45, 46 блок-схемы); перемещения
в центральном и крайнем сечениях; малый корень для прямой трубы t2 (блок 18 блок-схемы); параметр продольных
деформаций в точках с координатами β = 0°, β = 90°, β
= 180°.
(блоки 45, 46 блок-схемы); перемещения
в центральном и крайнем сечениях; малый корень для прямой трубы t2 (блок 18 блок-схемы); параметр продольных
деформаций в точках с координатами β = 0°, β = 90°, β
= 180°.
Приложение 1
(процедура KRONIN)
Приложение 2
Исходные данные к программе определения гибкости и напряженного состояния криволинейного участка трубопровода
ЛИТЕРАТУРА
1. Власов В.З. Общая теория оболочек и ее приложения в технике. М.-Л., Гостехиздат, 1949.
2. Ильин В.П. Об изгибе кривых тонкостенных труб. «Механика стержневых систем и сплошных сред». Сб. трудов ЛИСИ, вып. 49, Л., ЛИСИ, 1966.
3. Костовецкий Д.Л. Прочность трубопроводных систем энергетических установок. Л., Энергия, 1973.
4. Математическое обеспечение ЕС ЭВМ (пакет научных подпрограмм). Минск, изд. АН БССР, 1975.
СОДЕРЖАНИЕ