ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р |

Глобальная навигационная спутниковая система
ПАРАМЕТРЫ РАДИОНАВИГАЦИОННОГО ПОЛЯ
Технические требования и методы испытаний
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием «Научно-производственное объединение прикладной механики имени академика М.Ф. Решетнева» совместно с Федеральным государственным унитарным предприятием «Научно-исследовательский институт космического приборостроения»
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 «Радионавигация»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 27 декабря 2007 г. № 518-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещается также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
ГОСТ Р 52865-2007
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальная навигационная спутниковая система
ПАРАМЕТРЫ РАДИОНАВИГАЦИОННОГО ПОЛЯ
Технические требования и методы испытаний
Global navigation satellite system.
Parameters of radionavigation field.
Technical requirements and test methods
Дата введения - 2008-07-01
1 Область применения
Настоящий стандарт устанавливает параметры глобального радионавигационного поля, предоставляемые потребителям при использовании канала стандартной точности глобальной спутниковой навигационной системы (далее - система ГЛОНАСС) и предназначен для оценки текущих и прогнозируемых параметров радионавигационного поля системы ГЛОНАСС в процессе эксплуатации и при испытаниях навигационной аппаратуры.
2 Термины, определения, обозначения и сокращения
2.1 В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1.1 глобальная навигационная спутниковая система ГЛОНАСС (GLONASS global navigation satellite system): Спутниковая навигационная система, эксплуатируемая в Российской Федерации [1].
2.1.2 канал стандартной точности (Channel of Standard Accuracy): Канал, обеспечивающий заданный уровень точности определения местоположения и времени, доступный любому пользователю системы ГЛОНАСС на глобальной и непрерывной основе [2].
2.1.3 рабочая зона системы ГЛОНАСС (Service Volume): Пространство от поверхности Земли до высоты 2000 км, в котором обеспечиваются характеристики канала стандартной точности местоопределения потребителя системы ГЛОНАСС, выраженное в процентах установленного периода времени, в течение которого обеспечиваются заданные условия.
Примечание - В качестве эквивалентных терминов в нормативной документации на систему ГЛОНАСС допускается использовать термины «зона действия системы» и «обслуживаемое пространство системы».
2.1.4 доступность (Service Availability): Готовность спутников излучать навигационные сигналы в рабочей зоне системы ГЛОНАСС, обеспечивающие получение потребителем геометрического фактора ухудшения точности по вектору положения PDOP <, выраженная в процентах установленного периода времени, в течение которого обеспечиваются заданные условия.
Примечание - В качестве эквивалентного термина в нормативной документации на систему ГЛОНАСС допускается использовать термин «эксплуатационная готовность».
2.1.5 погрешность местоопределения (Error of Positioning): Разность измеренного и действительного положений потребителя в рабочей зоне системы ГЛОНАСС с заданным уровнем доступности и надежности, выраженная в процентах установленного периода времени, в течение которого обеспечиваются указанные условия.
2.1.6 погрешность передачи Всемирного координированного времени государственного эталона времени и частоты Российской Федерации (Time Transfer Accuracy of Russian Federation Universal Time Coordinated): Разность Всемирного координированного времени государственного эталона времени и частоты Российской Федерации и времени, полученного в результате местоопределения потребителя в зоне действия системы с заданным уровнем доступности, надежности и точности, выраженного в процентах времени за определенный период, в течение которого обеспечиваются заданные условия.
2.1.7 навигационное поле системы ГЛОНАСС (GLONASS navigation field): Совокупность радионавигационных сигналов в рабочей зоне системы ГЛОНАСС, позволяющая измерять навигационные параметры и определять местоположение и время потребителя с требуемым уровнем доступности, надежности и точности.
2.1.8 работоспособный спутник (Operational Satellite): Спутник системы ГЛОНАСС, способный передавать радионавигационный сигнал с параметрами и структурой, соответствующими установленным в Интерфейсном контрольном документе [1], получивший подтверждение о его работоспособности в навигационном сообщении.
2.1.9 навигационное сообщение (Navigation Message): Информация об эфемеридах, времени, состоянии спутников, представленная в цифровом виде, структура которой соответствует установленной в Интерфейсном контрольном документе [1], с помощью которой модулируют радионавигационный сигнал.
2.1.10 местоопределение (Position Solution): Определение пространственных координат путем псевдодальномерных измерений и использования навигационных сообщений со спутников системы ГЛОНАСС.
2.1.11 надежность обслуживания (Service Reliability): Выполнение системой ГЛОНАСС своих функций в течение определенного периода времени при установленных условиях эксплуатации.
2.1.12 перерыв в навигационном обеспечении каналом стандартной точности (Service Degradation): Период времени, в течение которого один или более параметров канала стандартной точности НКА не выполняются и потребители извещены об этом заранее.
2.1.13 отказ в навигационном обеспечении (Service Failure): Событие, происходящее в определенный период времени, в течение которого один или более параметров канала стандартной точности навигационного космического аппарата не выполняются и потребители не извещены об этом заранее.
2.1.14 псевдодальность (Pseudorange): Разность между временем приема сигнала пользователем и временем передачи его со спутника системы ГЛОНАСС, умноженная на скорость распространения радиоволн в пространстве.
2.1.15 геометрический фактор ухудшения точности по вектору положения (Position Delution of Precision): Отношение трехмерной погрешности местоопределения в точке нахождения потребителя к погрешности измерения псевдодальности.
2.1.16 радионавигационный сигнал (Radionavigation Signal): Радиосигнал кода стандартной точности, излучаемый навигационным космическим аппаратом и модулированный псевдослучайной последовательностью дальномерного кода, меткой времени и цифровой информацией навигационного сообщения, соответствующего требованиям Интерфейсного контрольного документа [1].
2.2 В настоящем стандарте применены следующие обозначения и сокращения:
АС - альманах системы ГЛОНАСС;
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ГНСС - глобальная навигационная спутниковая система;
ЗИС - закладочно-измерительная система;
ИКД - интерфейсный контрольный документ;
КИС - командно-измерительная система;
КСТ - канал стандартной точности;
МДВ - московское декретное время;
НАП - навигационная аппаратура потребителей;
НКА - навигационный космический аппарат;
НП - навигационное поле;
ПЗ-90 - геоцентрическая система координат Российской Федерации 1990 г. (параметры Земли 1990 г.);
ПКА - подсистема космических аппаратов;
ПКУ - подсистема контроля и управления;
СКП - среднеквадратичная погрешность;
ЭД - эксплуатационная документация;
UTC(SU) - универсальное координированное время России;
GMT - гринвичское среднее время;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки;
PDOP - геометрический фактор ухудшения точности по вектору положения;
MCOV - число сеансов за сутки, в которых не были выполнены требования по рабочей зоне;
MDATA - число потерянных сеансов за сутки из-за неготовности спутника к работе с пользователем;
MAVL - число сеансов местоопределений за сутки в интервале, в которых были выполнены требования по доступности;
MREL - число сеансов, не пригодных для оценки погрешности местоопределения;
RAVE - средняя оценка надежности за год;
R(dayd) - средняя оценка надежности за сутки;
Rp - мгновенное значение надежности в точке рабочей зоны;
AAVE - среднесуточное значение доступности в точке рабочей зоны за 60 сут;
A4SV (dayd) - среднесуточное значение доступности в точке рабочей зоны за сутки;
Ар - мгновенное значение доступности в точке рабочей зоны;
Ср - мгновенное значение оценки существования рабочей зоны в точке;
C4SV - значение рабочей зоны в процентах;
SACC - общее число сеансов местоопределений в заданной точке за сутки для оценки погрешности местоопределения, соответствующее требованиям к рабочей зоне, доступности и надежности;
SCOV - число сеансов местоопределений в заданной точке за сутки;
SД - число сеансов местоопределений в заданной точке за сутки, при которых выполнялось требование доступности;
SH - число сеансов местоопределений в точке за сутки, при которых выполнялось требование надежности.
3 Технические требования
3.1 Общие требования
3.1.1 В процессе местоопределения НАП должна проводить измерения псевдодальности до любого подготовленного к работе НКА ГЛОНАСС, находящегося в зоне ее радиовидимости, а также принимать и обрабатывать навигационные сообщения, содержащиеся в составе спутниковых навигационных радиосигналов. Подготовку НКА к работе проводят с помощью технических средств системы ГЛОНАСС, указанных в приложении А.
Для пересчета параметров эфемерид, полученных из навигационного сообщения спутника на момент измерения, используют алгоритмы, приведенные в приложении Б, или эквивалентные им алгоритмы по точности.
3.1.2 Для проведения местоопределения используют сигнал стандартной точности на частоте L1 с тактовой частотой 0,511 МГц, предназначенный для гражданских потребителей.
3.1.3 Ограничения при определении параметров КСТ
Параметры КСТ определяют с учетом:
- модели ошибок ионосферы;
- модели ошибок тропосферы;
- многолучевого распространения сигнала.
3.1.4 Ограничения на характеристики системы ГЛОНАСС
3.1.4.1 В подсистему НКА должны входить не менее 21 НКА.
3.1.4.2 Интенсивность кратковременных отказов спутников должна быть не более 0,978.
3.1.4.3 Интенсивность замены вышедших из строя спутников (при групповых запусках по три спутника) должна быть не более шести спутников в год.
3.1.4.4 Срок замены вышедшего из строя спутника должен быть не более:
- из орбитального резерва - 20 сут;
- с Земли - 50 сут;
- средний - 30 сут.
3.1.4.5 Среднеквадратичные погрешности эфемерид спутников не должны превышать:
- вдоль орбиты - 20 м;
- по бинормали - 10 м;
- по радиусу-вектору - 5 м.
3.1.4.6 Среднеквадратичная погрешность взаимной синхронизации бортовых часов спутников в системе должна быть не более 20 нс.
3.1.4.7 Предельные смещения НКА в плоскости орбиты относительно его номинального положения в течение срока эксплуатации не должны превышать ±5°.
3.1.4.8 Пороговое значение фактора PDOP должно быть не более 6.
3.1.5 Требования к приемнику
3.1.5.1 Конструкция приемника должна соответствовать требованиям Интерфейсного контрольного документа [1].
3.1.5.2 Приемник должен начинать измерения навигационных параметров с угла не менее 5° относительно горизонта.
3.1.5.3 Приемник должен проводить местоопределение в системах координат ПЗ-90 и времени UTS(SU); для перехода к другим системам координат и времени должны использоваться соответствующие матрицы пересчета, приведенные в [1] - [3].
3.1.5.4 Приемник должен проводить слежение и местоопределение по измерениям не менее чем с четырех НКА.
3.1.5.5 Приемник должен исключать из процесса местоопределения любой НКА в случае появления в навигационном сообщении признака неисправности НКА.
3.1.5.6 Среднеквадратичная погрешность измерения псевдодальности приемником не должна быть более 5 м.
3.2 Значения параметров радионавигационного поля
Параметры радионавигационного поля не должны превышать значений, приведенных в таблице 1. Параметры радионавигационного поля рассчитывают методом математического моделирования с учетом требований 3.1.
Примеры расчета значений параметров радионавигационного поля приведены в приложении В.
Таблица 1 - Значения параметров радионавигационного поля
|
Значение |
Условия и ограничения |
|
|
Рабочая зона системы |
98,0 |
Расчеты проводят по данным четырех и более спутников в течение 24 ч. Четыре спутника должны обеспечивать фактор PDOP не более 6. Угол места спутника должен быть 5°. В соответствии с АС в ПКА должно быть не менее 21 работающего спутника |
|
Доступность обслуживания в среднем по поверхности Земли, %, не менее |
Расчет проводят с учетом значения рабочей зоны, периодов замены НКА и восстановления работоспособности НКА. Определяют среднее значение измерений за 60 сут путем усреднения суточных значений по поверхности Земли |
|
|
99,64 |
||
|
Надежность обслуживания в среднем по поверхности Земли, %, не менее |
Расчеты проводят, если рабочая зона и доступность соответствуют установленным требованиям. Пороговая погрешность местоопределения в плане должна быть не более 140 м. Определяют среднее значение измерений за один год путем усреднения суточных значений для худшей точки на поверхности Земли. Время локализации отказа должно быть не более 18 ч. |
|
|
99,98 |
||
|
Погрешность местоопределения, м, не более: в горизонтальной плоскости: |
Расчеты проводят, если рабочая зона, доступность и надежность соответствуют установленным требованиям. Значения определяют в течение 24 ч для любой точки на поверхности Земли |
|
|
- за 95 % времени |
28 |
|
|
- за 99 % времени |
140 |
|
|
по вертикали: |
||
|
- за 95 % времени |
60 |
|
|
- за 99 % времени |
585 |
|
|
Погрешность передачи времени UTC(SU) за 95 % времени, нс, не более |
700 |
Расчеты проводят, если рабочая зона, доступность и надежность соответствуют установленным требованиям. При расчетах учитывают погрешность привязки времени спутника и его передачу пользователю. Значения определяют в течение 24 ч для любой точки поверхности Земли |
4 Методы испытаний
4.1 Общие требования
Основные параметры навигационного поля системы ГЛОНАСС определяют методом моделирования функционирования системы ГЛОНАСС в процессе проведения статистических испытаний. При этом в общую статистику моделируемых измерений по рабочей зоне допускается включать измерения по реальным сигналам НКА, полученным в соответствующих точках рабочей зоны навигационным приемником, параметры которого соответствуют требованиям, установленным в настоящем стандарте.
Примечание - Методы определения параметров радионавигационного поля системы ГЛОНАСС гармонизированы с аналогичными методами, разработанными для системы GPS, поскольку системы ГЛОНАСС и GPS используются как международные [3] - [5].
4.2 Определение рабочей зоны
Размеры рабочей зоны определяют в следующей последовательности при выполнении требований 3.1 для любой точки Земли в течение 24 ч по следующему алгоритму
- по АС рассчитывают положения спутников (включая неисправные спутники) каждую секунду в течение 24 ч.;
- рассчитывают углы места для каждого спутника без учета рельефа местности;
- если четыре или более спутников находятся в зоне видимости (угол места более 5°) в момент k, для определения местоположения выбирают созвездие спутников с наименьшим значением PDOP. Если PDOP равен или менее 6, то мгновенный коэффициент рабочей зоны Ср принимают равным 1.
Если в зоне радиовидимости находится менее четырех спутников или если PDOP больше 6 для любой комбинации из четырех спутников, то Ср считают равным 0:
- величину рабочей зоны (C4SV), %, рассчитывают по формуле
где SCOV - число сеансов местоопределений в точке за сутки, равное 86400 с,
Ср - мгновенное значение оценки существования рабочей зоны в точке, с.
4.3 Определение доступности обслуживания
Доступность обслуживания определяют в течение 24 ч на поверхности Земли в следующей последовательности при обеспечении выполнения требований 3.1, 3.2 для определенного значения рабочей зоны на момент определения доступности:
- проводят ежесекундные измерения по всем радиовидимым НКА в течение 24 ч в точке;
- проверяют, соответствует ли рабочая зона установленным требованиям: если рабочая зона в какой-либо момент времени не соответствует установленным требованиям (число спутников больше трех и PDOP равен или менее шести), то проверку доступности обслуживания не проводят. Определяют число сеансов за сутки, в которых рабочая зона не соответствует установленным требованиям, MCOV по формуле
![]()
где Cp - мгновенное значение оценки существования рабочей зоны в точке, с;
SCOV - число сеансов местоопределений в точке за сутки, равное 86400 с;
- каждую секунду анализируют передаваемые спутниками навигационные сообщения, чтобы проверить, готовы ли все четыре выбранных спутника к работе. Если все четыре спутника готовы к работе, Ар считают равным 1, если хотя бы один из спутников не готов к работе, то Ар считают равным 0. Если один или несколько из выбранных спутников не готовы к работе, то проводят повторный выбор четырех спутников. Если комбинация спутников обеспечивает PDOP более или равный шести, или если хотя бы один из спутников не готов к работе, то Ар считают равным 0;
- определяют число сеансов местоопределений Sg, проводимых для проверки доступности обслуживания, по формуле
Sg = SCOV - MCOV - MDATA,
где MDATA - число потерянных сеансов за сутки из-за планируемых перерывов в работе спутника;
MCOV - число сеансов за сутки, в которых рабочая зона не соответствует установленным требованиям;
- рассчитывают доступность обслуживания за сутки A4SV(dayd), %, по формуле
- рассчитывают среднее значение доступности обслуживания за сутки AAVE за 60 сут последовательных измерений по формуле
4.4 Определение надежности обслуживания
Надежность обслуживания определяют в тех точках на поверхности Земли, где обеспечивается выполнение требований к рабочей зоне и доступности. При определении надежности обслуживания в точках рабочей зоны пороговую погрешность местоопределения в плане из-за отказов НКА принимают равной 140 м.
Надежность обслуживания определяют по усредненным суточным значениям за 1 ч, а среднее значение надежности обслуживания на поверхности Земли за сутки определяют при времени локализации отказа ПКА не более 18 ч.
Определение надежности обслуживания проводят в следующей последовательности:
- располагают приемник в требуемой точке рабочей зоны и в течение суток обеспечивают ежесекундное наблюдение за всеми видимыми спутниками;
- определяют доступность обслуживания; если доступность обслуживания в какой-либо момент времени не соответствует установленным требованиям, то определение надежности не проводят;
- определяют число секундных сеансов местоопределений за сутки, в которых доступность обслуживания соответствует установленным требованиям MAVL по формуле
![]()
- рассчитывают погрешность местоопределения в плане;
- рассчитывают широтную Δe(tk) и долготную Δn(tk) составляющие погрешности местоопределения в метрах на каждый момент времени tk по формулам:
Δe(tk) = [λmeasured(tk) - λsite]111319,4908 · cos Фsite;
Δn(tk) = [Фmeasured(tk) - Фsite]111319,4908
или по эквивалентным формулам:
Δе(tk) = K11ΔrSV1(tk) + K21ΔrSV2(tk) + K31ΔrSV3(tk) + K41ΔrSV4(tk);
Δn(tk) = K12ΔrSV1(tk) + K22ΔrSV2(tk) + K32ΔrSV3(tk) + K42ΔrSV4(tk),
где Kij - коэффициенты матрицы системы уравнений для местоопределения;
ΔrSV - разность спрогнозированного и измеренного значений псевдодальностей;
[λmeasured(tk) - λsite] - разность измеренного и известного значений долготы на момент времени tk;
[Фmeasured(tk) - Фsite] - разность измеренного и известного значений широты на момент времени tk.
Затем рассчитывают горизонтальную погрешность ΔН(tk)
ΔH(tk) = ((Δe(tk))2 + (Δn(tk))2)1/2;
- определяют сеансы, в которых погрешность в плане была более 140 м; значение надежности Rp считают равным 1, а если погрешность в плане менее 140 м, то значение надежности Rp считают равным 0;
- определяют число местоопределений для оценки надежности обслуживания SH
SH = SCOV - MAVL - MCOV - MDATA;
- рассчитывают надежность R(dayd) за 24 ч по формуле
- рассчитывают среднегодовую надежность RAVE по 365 сут оценкам надежности по формуле
4.5 Определение погрешности местоопределения
Погрешность местоопределения в системе ГЛОНАСС определяют следующим методом при выполнении установленных требований в течение 24 ч для любой точки поверхности Земли.
Измерения проводят каждую секунду в течение 24 ч. При каждом измерении проверяют, соответствует ли надежность обслуживания установленным требованиям. Если надежность обслуживания при каком-либо измерении не соответствует установленным требованиям, то измерение не учитывают.
Затем рассчитывают общее число сеансов SACC и вычисляют погрешность определения местоположения по формуле
SACC = 86400 - MCOV - MAVL - MREL - MDATA,
где ![]()
Определение погрешности в плане рассчитывают по следующему алгоритму:
- расчеты проводят каждую секунду в течение суток;
- рассчитывают широтную Δe(tk) и долготную Δn(tk) составляющие ошибки в каждый момент времени tk по формулам:
Δe(tk) = [λmeasured(tk) - λsite]111319,4908 · cos Фsite;
Δn(tk) = [Фmeasured(tk) - Фsite]111319,4908
или по эквивалентным формулам:
Δе(tk) = K11ΔrSV1(tk) + K21ΔrSV2(tk) + K31ΔrSV3(tk) + K41ΔrSV4(tk);
Δn(tk) = K12ΔrSV1(tk) + K22ΔrSV2(tk) + K32ΔrSV3(tk) + K42ΔrSV4(tk),
где Kij - коэффициенты решающей матрицы;
ΔrSV - разность спрогнозированной и измеренной псевдодальностей;
λmeаsured(tk) - λsite - разность измеренной и известной долготы в момент времени tk;
Фmeasured(tk) - Фsite - разность измеренной и известной широты в момент времени tk;
- затем рассчитывают горизонтальную погрешность ΔН(tk) по формуле
ΔH(tk) = ((Δe(tk))2 + (Δn(tk))2)1/2;
- рассчитывают распределение оценки погрешностей и определяют погрешность, соответствующую 95 % и 99,99 % испытаний, по формулам:
ΔН95 = ΔН при n = INTEGER(0,95SACC),
ΔН99,99 = ΔН при n = INTEGER(0,9999SACC).
Определение погрешности местоопределения по вертикали определяют по следующему алгоритму:
- расчеты проводят каждую секунду в течение суток;
- рассчитывают вертикальную составляющую погрешности на каждый момент времени tk. Погрешность по вертикали Δu(tk), м, рассчитывают по формуле
Δu(tk) = [Vmeasured(tk) - Vsite]
или по формуле
Δu(tk) = K13ΔrSV1(tk) + K23ΔrSV2(tk) + K33ΔrSV3(tk) + K43ΔrSV4(tk),
где Kij - коэффициенты решающей матрицы;
ΔrSV - разность спрогнозированной и измеренной псевдодальностей;
Vmeasured(tk) - Vsite - разность измеренной и известной вертикали в момент времени tk;
- рассчитывают распределение оценки погрешностей и определяют погрешность, соответствующую 95 % и 99,99 % испытаний по формулам:
ΔV95 = ΔV при n = INTEGER(0,95SACC);
ΔV99,99 = ΔV при n = INTEGER(0,9999SACC).
4.6 Определение погрешности передачи времени UTC(SU)
Погрешность передачи времени UTC(SU) в системе ГЛОНАСС определяют по известным соотношениям среднеквадратичной погрешности в точке при выполнении установленных требований и наличии координат и шкалы Государственного эталона UTC(SU).
Погрешность передачи UTC(SU) в системе ГЛОНАСС определяют за период 24 ч для любой точки поверхности Земли.
4.7 Объем статистики для определения параметров радионавигационного поля
4.7.1 Для определения параметров радионавигационного поля рабочую зону системы ГЛОНАСС представляют в виде сферической поверхности Земли, которую в свою очередь аппроксимируют равномерной аналитической сеткой, в узлах которой располагают НАП.
4.7.2 Аналитическая сетка должна иметь следующие размеры:
- по широте узлы должны быть расположены через каждые 3°;
- по долготе должны быть расположены через каждые 150 морских миль.
4.7.3 Дискретность измерений и периоды в каждом узле аналитической сетки должны соответствовать требованиям таблицы 1.
4.7.4 Параметры радионавигационного поля определяют в следующей последовательности:
- проводят комплекс измерений в каждом узле аналитической сетки за сутки;
- рассчитывают среднеарифметическое значение определяемых параметров всех точек сетки (по рабочей зоне системы ГЛОНАСС).
Приложение А
(справочное)
Состав системы ГЛОНАСС
А.1 Система ГЛОНАСС предназначена для определения местоположения, скорости движения и точного времени сухопутных, морских, воздушных и космических потребителей.
Требования точности, непрерывности, доступности, надежности и времени навигационных определений вышеперечисленных потребителей обеспечиваются двумя подсистемами: ПКА и ПКУ.
А.2 Подсистема космических аппаратов
А.2.1 ПКА системы ГЛОНАСС состоит из 24 спутников ГЛОНАСС или модернизированных спутников ГЛОНАСС-М.
Примечание - Модернизированные спутники ГЛОНАСС-М обеспечивают для всех типов потребителей более высокий уровень точности, дополнительные функциональные возможности и передают код стандартной точности в новом частотном диапазоне (1242,9375 - 1248,625) ± 0,511 МГц на частоте L2 дополнительно к коду стандартной точности (1592,0625 - 1605,375) ± 0,511 МГц на частоте L1.
А.2.2 Каждый спутник в составе навигационного сигнала излучает навигационное сообщение, сформированное спутником на основе данных, закладываемых ПКУ один - два раза в сутки. Спутники системы ГЛОНАСС передают сигналы для гражданских потребителей в частотном диапазоне L1. Спутники ГЛОНАСС-М передают дополнительный навигационный сигнал в частотном диапазоне L2, аналогичный по структуре сигналу частотного диапазона L1. Использование двух сигналов в частотных диапазонах L1 и L2 позволяет потребителю исключить ионосферную составляющую ошибки измерения псевдодальности.
В системе ГЛОНАСС обеспечено частотное разделение сигналов в частотных диапазонах L1 и L2. Каждый спутник излучает радиосигналы на собственных частотах. При этом спутники, находящиеся в противоположных точках орбитальной структуры, как правило, излучают навигационные сигналы на одинаковых частотах.
|
Спутник системы ГЛОНАСС |
|
|
|
|
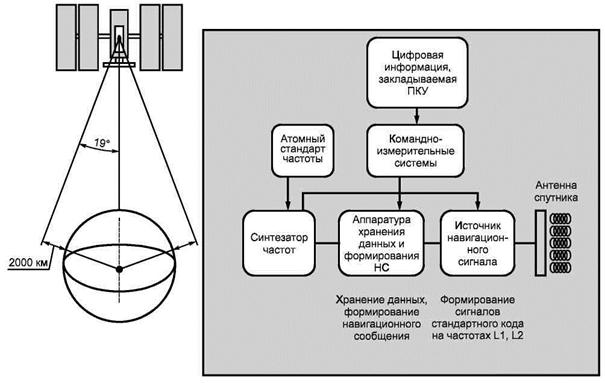
Рисунок А.1 - Процесс генерирования сигналов на спутнике
В процессе эксплуатации ПКУ может изменять значения частот спутника, информируя потребителя об этом через навигационное сообщение (номер литерных частот спутника).
Периодическое закладывание в ПКУ новых параметров спутника не приводит к перерывам передачи излучения дальномерных сигналов навигационного сообщения.
А.2.3 На спутниках старой модификации системы ГЛОНАСС обновленная после закладки информация начинает передаваться в навигационном сообщении через несколько минут после закладывания новых данных, а не в начале нового интервала Dtв. В связи с этим, для обеспечения непрерывности работы в дифференциальном режиме необходимо в НАП и дифференциальных дополнениях использовать специальные алгоритмы работы, указанные в [1], [3].
На спутниках новой модификации систем ГЛОНАСС-М и ГЛОНАСС-К начало передачи новых данных в навигационном сообщении после их закладывания будет совпадать с началом нового интервала tв.
Примечание - Длительность интервала tв устанавливают в зависимости от значения признака П1, передаваемого в навигационном сообщении в соответствии с [1].
А.2.4 ПКА, состоящая из 24 спутников, распределенных равномерно в пространстве, формирует непрерывное глобальное навигационное поле на поверхности Земли и в околоземном пространстве до высоты 2000 км, при этом каждый спутник излучает навигационные сигналы, направленные на Землю под углом ±19°.
Схема процесса генерирования сигналов на спутнике приведена на рисунке А.1.
А.3 Подсистема контроля и управления
А.3.1 ПКУ состоит из центра управления системой ГЛОНАСС, центрального синхронизатора системы, командно-измерительных систем, системы управления, измерения и контроля, аппаратуры контроля навигационного поля и радиоконтроля орбиты и квантово-оптической (лазерной) измерительной системы. Данные средства управления и контроля обеспечивают выполнение полного объема работ по управлению системой ГЛОНАСС. Схема процесса управления приведена на рисунке А.2. Основным элементом в процессе управления орбитальной группировкой является центр управления системой ГЛОНАСС, который обеспечивает непрерывное управление орбитальной группировкой путем:
- обеспечения непрерывного функционирования спутников по целевому назначению;
- управления спутниками и обеспечения параметров навигационных сигналов, соответствующих требованиям Интерфейсного контрольного документа [1] и настоящего стандарта;
- формирования навигационных данных и закладки их на спутник в соответствии с эксплуатационной документацией и заданными параметрами навигационного поля;
- оперативного выявления неисправностей и их локализации в ПКА и ПКУ.
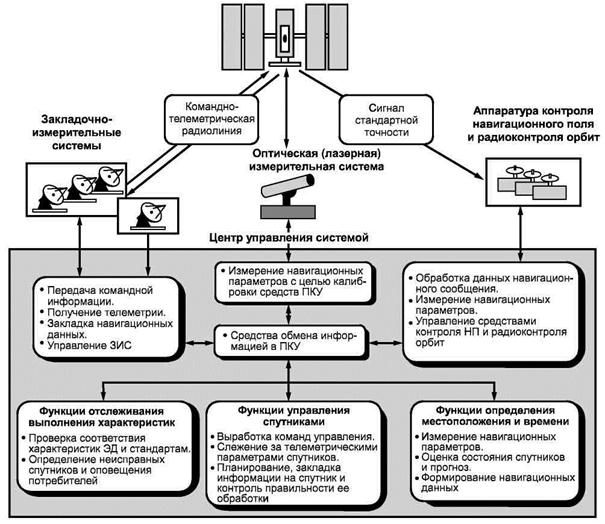
Рисунок А.2 - Процесс управления системой спутников
А.3.2 В ПКУ входят командно-измерительные (закладочно-измерительные) системы, обеспечивающие телеметрический контроль и управление, т.е. интерфейс между каждым спутником орбитальной группировки и центром управления системой ГЛОНАСС. Командно-измерительные системы выполняют также измерения дальности и приращения дальности (запросной дальности до спутника и обратно до измерительной системы), которые используют для расчета параметров орбит и синхронизации навигационных сигналов спутников.
В рабочей зоне ПКУ также обеспечивает контроль параметров навигационного поля системы ГЛОНАСС. Дискретность контроля параметров навигационного поля в зоне радиовидимости средств ПКУ составляет ~ 30 мин.
А.3.3 Все технические средства ПКУ расположены на территории Российской Федерации. Общая зона радиовидимости средств ПКУ для определения параметров орбиты спутников системы составляет 13 ч в сутки. Следовательно, на каждом витке спутник системы ГЛОНАСС находится вне зоны радиовидимости средств ПКУ около 5,5 ч. С учетом времени на локализацию отказов работы общее время спутника должно быть не более 18 ч. За это время ПКУ восстанавливает работоспособность спутника или оповещает пользователей через навигационное сообщение о выходе его из строя.
Приложение Б
(справочное)
Примеры алгоритмов расчета
координат
и скорости НКА ГЛОНАСС на текущий момент времени
по данным эфемерид и альманаха
Б.1 Алгоритм пересчета эфемерид НКА на текущий момент времени
Б.1.1 Упрощенный алгоритм пересчета эфемерид НКА на текущий момент времени
Пересчет эфемерид с момента времени tb на момент проведения измерений проводят численным интегрированием следующих дифференциальных уравнений движения НКА в системе координат ПЗ-90 [2]:
![]()
![]()
![]()



где х, у, z, Vx, Vy, Vz - координаты и составляющие вектора скорости НКА;
r - радиус-вектор НКА, равный (х2 + у2 + z2)1/2;
μ - константа гравитационного поля Земли, равная 398600,44 · 109 м3/с2;
ае - экваториальный радиус Земли, равный 6378136 м;
J02 - вторая зональная гармоника разложения геопотенциала Земли в ряд по сферическим функциям, равная 1082625,7 · 10-9;
ω - угловая скорость вращения Земли, равная 7,292115 · 10-5 рад/с.
Начальными условиями интегрирования приведенной системы уравнений являются координаты и составляющие вектора скорости n-го спутника xn(tb), yn(tb), zn(tb)
![]()
рассчитанными на момент времени tb.
Ускорения от лунно-солнечных гравитационных возмущений ![]() ;
; ![]() ;
; ![]() в интервале
30 мин принимают постоянными.
в интервале
30 мин принимают постоянными.
Б.1.2 Алгоритм пересчета эфемерид НКА на текущий момент времени в прямоугольной абсолютной геоцентрической системе координат
Б.1.2.1 Пересчет эфемерид с момента времени tэ на момент измерения навигационных параметров (τi = ti - tэ < 15 мин) проводят численным интегрированием дифференциальных уравнений движений НКА, в правых частях которых учитывают ускорения, определяемые константой гравитационного поля Земли μ, второй зональной гармоникой С20, характеризующей полярное сжатие Земли, а также ускорения лунно-солнечных гравитационных возмущений.
Уравнения движения интегрируют в прямоугольной абсолютной геоцентрической системе координат OXaYaZa, связанной с текущим экватором и точкой весеннего равноденствия, методом Рунге-Кутта 4-го порядка и имеют вид:
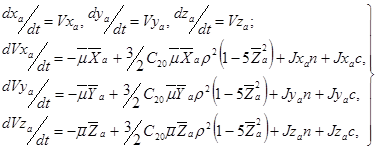 (1)
(1)
где μ = μ/r2;
Xa = xa/r;
Ya = ya/r;
Za = za/r;
ρ = ae/r;
![]()
Jxaс, Jyaс, Jzaс - ускорения от солнечных гравитационных возмущений, м/с2;
Jxaл, Jyaл, Jzaл - ускорения от лунных гравитационных возмущений, м/с2;
ае - экваториальный радиус Земли, равный 6378,136 км по [1], [2];
μ - константа гравитационного поля Земли (398600,44 км3/с2) по [1], [2];
С20 -
коэффициент второй зональной гармонике разложения гравитационного поля Земли в
ряд по сферическим функциям, равный -1082,63 · 10-6
(![]() где
где ![]() -
нормализованное значение гармонического коэффициента второй
зональной гармонике, равное - 484,165 · 10-6 по [1],
[2]).
-
нормализованное значение гармонического коэффициента второй
зональной гармонике, равное - 484,165 · 10-6 по [1],
[2]).
Б.1.2.2 Ускорения от лунных и солнечных гравитационных возмущений вычисляют по одним и тем же формулам, заменяя индекс k на k = л для Луны и k= с для Солнца:
|
|
(2) |
где ![]()
![]()
![]()
![]()
![]()
k - индекс возмущающего тела (k = л для Луны и k = с для Солнца);
xk, hk, zk, rk - направляющие косинусы и радиус-вектор возмущающих тел в системе OXaYaZa на момент tэ;
μл - константа гравитационного поля Луны, равная 4902,835 км3/с2;
μс - константа гравитационного поля Солнца, равная 0,1325263 · 1012 км/с2.
Входящие в формулы (2) величины xk, hk, zk, rk вычисляют один раз (на момент времени tэ) для интервала размножения (±15 мин) по формулам:
где Ek = gk + eksin Ek,
![]()
x11 = sin Wлcos Wл(1 - cosiл);
x12 = 1 - sin2 Wл(1 - cosiл);
h11 = x*cos ε - z*sin ε;
η12 = x11cos ε + η*sin ε;
z11 = x*sin ε + z*cos ε;
z12 = x11sin ε - η*cos ε;
x* = 1 - cos2 Wл(1 - cos iл);
η* = sin Wлsin iл;
z* = cos Wлsin iл;
gk = g0k + g1kT;
Wл = W0л + W1лT;
Т = (27392,375 + Σдн + tэ/86400)/36525;
где ал - большая полуось орбиты Луны, равная 3,84385243 · 105 км;
ас - большая полуось орбиты Солнца, равная 1,49598 · 108 км;
eл - эксцентриситет лунной орбиты, равный 0,054900489;
ec - эксцентриситет солнечной орбиты, равный 0,016719;
iл - наклонение орбиты Луны к плоскости эклиптики, равное 5°08'43,4";
ε - средний наклон эклиптики к экватору, равный 23°26'33";
g0л = -63°53'43,41";
g1л = 477198°50'56,79";
W0л = 259°10'59,79";
W1л = -1934°08'31,23";
Г'0 = -334°19'46,40";
Г'1 = 4069°02'02,52";
ωс = 281°13'15,00" + 6189,03" · T;
g0с = 358°28'33,04";
g1с = 129596579,10";
Т - время от основной эпохи 1900 г., 0 января, 12 ч гринвичского среднего времени (GMT) до момента задания эфемерид tэ в юлианских столетиях по 36525 эфемеридных суток;
27392,375 - число дней от основной эпохи 1900 г., 0 января, 12 ч (GMT) до эпохи 1975 г., 0 января, 0 ч (МДВ) с учетом трех часов при пересчете московского декретного времени (МДВ) tэ в гринвичское (GMT);
Σдн - сумма дней от 0 ч эпохи 1975 г., 0-го января (МДВ) до 0 ч текущей даты (МДВ), к которой относится время tэ (отсчет начала дат по московскому времени).
Начальными условиями для интегрирования системы по уравнениям (1) являются гринвичские координаты X(tэ), Y(tэ), Z(tэ) и составляющие вектора скорости Vx(tэ), Vy(tэ), Vz(tэ), содержащиеся в навигационном кадре, которые пересчитывают из гринвичской системы координат OXYZ (ПЗ-90) в абсолютную OXaYaZa по следующим формулам:
Ха(tэ) = X(tэ)cos S - Y(tэ)sin S;
Ya(tэ) = Y(tэ)sin S + Y(tэ)cos S;
Za(tэ) = Z(tэ);
Vxa(tэ) = Vx(tэ)cos S - Vy(tэ)sin S - ωзYa(tэ);
Vya(tэ) = Vx(tэ)sin S + Vy(tэ)cos S + ωзХа(tэ);
Vza(tэ) = Vz(tэ);
S = s + ωЗ(t - 3),
где ωЗ - угловая скорость вращения Земли, равная 0,7292115 · 10-4 с-1;
s - истинное звездное время в гринвичскую полночь даты задания эфемерид tэ.
Примечания
1 Ускорения Jxаc, Jyac, Jzаc, Jxал, Jyaл, Jzал в уравнениях (1) считают постоянными и вычисляют один раз на момент tэ по формулам (2) или исключают их из уравнений (1) с последующим добавлением к результатам интегрирования следующих поправок:
ΔX = (Jxaл + Jxac)τ2/2;
ΔY = (Jyaл + Jyac)τ2/2;
ΔZ = (Jzaл + Jzac)τ2/2;
ΔVx = (Jxaл + Jxac)τ;
ΔVy = (Jyaл + Jyac)τ;
ΔVz = (Jzaл + Jzac)τ,
где τ = tj - tэ.
2 Направляющие косинусы xk, hk, zk вычисляют по формулам (3).
3 Начало гринвичской (правой) системы координат - в центре масс Земли, ось OZ направлена по оси вращения Земли к северному полюсу, а ось ОХ - в точку пересечения гринвичского меридиана с плоскостью экватора.
4 Если при интегрировании уравнений (1) исключают лунно-солнечные ускорения, вычисленные по формулам (2), то их учет проводят путем добавления к результатам интегрирования следующих поправок:
ΔX = (Jxaл + Jxac)τ2/2;
ΔY = (Jyaл + Jyac)τ2/2;
ΔZ = (Jzaл + Jzac)τ2/2;
ΔVx = (Jxaл + Jxac)τ;
ΔVy = (Jyaл + Jyac)τ;
ΔVz = (Jzaл + Jzac)τ,
где (Jxaл + Jxac), (Jyaл + Jyac), (Jzaл + Jzaс) - проекции лунно-солнечных ускорений на оси системы OXaYaZa на момент задания эфемерид tэ, которые вычисляют по формулам (2). Возникающее при этом увеличение ошибок размножения эфемерид не будет превышать 10 %.
5 Для расчета эфемерид КА на моменты навигационных измерений tj должны быть использованы проекции лунно-солнечных ускорений X"(tэ), Y"(tэ), Z"(tэ) на оси гринвичской геоцентрической системы координат, которые передают в составе навигационного кадра. Перед интегрированием системы дифференциальных уравнений (1) эти ускорения должны быть переведены в прямоугольную абсолютную геоцентрическую систему координат OXаYаZа по формулам:
(Jxaл + Jxaс) = Х"(tэ)cos S - Y"(tэ)sin S;
(Jyaл + Jyaс) = X"(tэ)sin S + Y"(tэ)cos S;
(Jzaл + Jzac) = Z"(tэ).
В таблице Б.1 приведены значения погрешностей размножения эфемерид.
Таблица Б.1 - Значения погрешностей размножения эфемерид.
|
Погрешность размножения эфемерид, м, в интервале интегрирования |
|||
|
5 мин |
10 мин |
15 мин |
|
|
1 |
0,42 |
0,56 |
0,77 |
|
2,5 |
0,42 |
0,56 |
0,77 |
|
5 |
0,45 |
0,61 |
0,83 |
|
7,5 |
- |
- |
1,21 |
Б.2 Алгоритм расчета параметров движения спутников по данным АС
Алгоритм расчета параметров движения НКА ГЛОНАСС по данным АС используется потребителями при выборе оптимального созвездия и расчете целеуказаний для вхождения в связь с выбранным НКА. Алгоритм предназначен для расчета координат и составляющих вектора скорости НКА в момент установления потребителем связи с НКА.
Б.2.1 Состав данных, образующих АС
АС содержит набор параметров орбит НКА системы ГЛОНАСС,
установленных для каждого НКА на момент прохождения им первого (внутри суток с
номером NAj)
восходящего узла орбиты ![]() .
.
Набор параметров орбит каждого НКА содержит:
NAj - календарный номер суток за четырехлетний период с начала ближайшего високосного года, к которому относятся данные АС для j-го НКА;
λj - гринвичская долгота
восходящего узла орбиты j-го
НКА в момент времени ![]() в радианах;
в радианах;
![]() -
московское декретное время прохождения j-м
НКА восходящего узла орбиты, ближайшее к началу суток с номером NAj, в
секундах;
-
московское декретное время прохождения j-м
НКА восходящего узла орбиты, ближайшее к началу суток с номером NAj, в
секундах;
Δij - поправка к среднему
значению наклонения орбиты j-го НКА в момент времени ![]() ;
;
ΔTj - поправка к среднему значению драконического периода обращения j-го НКА;
ΔT'j - скорость изменения периода обращения j-го НКА;
εj - эксцентриситет
орбиты j-го НКА в момент времени ![]() ;
;
ωj - аргумент перигея орбиты j-го НКА в момент времени ![]() в радианах; где λ - индекс принадлежности параметров АС ко времени прохождения
восходящего узла орбиты
в радианах; где λ - индекс принадлежности параметров АС ко времени прохождения
восходящего узла орбиты ![]() , а j - номер НКА (j =
1, ..., 24). В дальнейшем индекс j
опущен.
, а j - номер НКА (j =
1, ..., 24). В дальнейшем индекс j
опущен.
Средние значения наклонения плоскости орбиты НКА системы ГЛОНАСС iср и драконического периода обращения Тср равны 63° и 43200" соответственно.
Набор параметров орбиты для каждого НКА задан в гринвичской геоцентрической системе координат OXYZ, «замороженной» в момент t.
Начало системы координат совпадает с центром масс Земли. Ось Z направлена к северному полюсу на среднюю эпоху 1900 - 1905 гг., плоскость XOZ при этом параллельна среднему гринвичскому меридиану и определяет положение начала системы счета долгот, а ось OY - дополняет систему до правой.
Б.2.2 Алгоритм расчета параметров движения НКА
Расчет координат и составляющих вектора скорости НКА по данным АС в абсолютной геоцентрической системе координат OXаYаZа (начало системы координат и направление оси OZа совпадает с началом системы координат OXYZ и направлением оси OZ, плоскость XOZ отстоит от плоскости XаOZа на значение истинного звездного времени S, а ось OYа дополняет систему до правой) в заданный момент времени ti (московское декретное время суток с номером N0 за четырехлетний период) проводят в два этапа.
Сначала с помощью ΔT, ΔT' и λ рассчитывают момент прохождения восходящего узла орбиты tk на витке с номером К, к которому принадлежит заданный момент времени ti (ti - tk < Tср + ΔT), а также долготу восходящего узла λk на этом витке. Остальные параметры считают постоянными и равными тем, которые содержатся в навигационном кадре.
Затем оскулирующие элементы пересчитывают с момента tk по аналитическим формулам на момент ti. При этом учитывают вековые и периодические возмущения в элементах орбиты НКА от второй зональной гармоники С20 в разложении геопотенциала, характеризующей полярное сжатие Земли.
Полученные на момент ti оскулирующие элементы переводят в кинематические параметры.
Расчет проводят в следующей последовательности:
1) методом последовательного приближения находят большую полуось орбиты а:
![]()
p(n) = a(n)(1 - ε2), n = 0, 1, 2, ...;
где υ = -ω;
i = iср + Δi;
Tдр = Тср + ΔТ.
За начальное приближение принимают ![]() ;
;
Приближение заканчивается при выполнении условия |а(n - 1) - а(n)| < 10-3 км.
Для этого обычно достаточно двух - трех итераций;
2) рассчитывают момент прохождения восходящего узла орбиты tk на витке, к которому относится момент ti, и долгота восходящего узла на этом витке равна λк:
tλk = [tλk]mod 86400;
tλk = tλ + TдрW + ΔТ'W2;
Wk = t*/Тдр, где W - целая часть Wk;
t* = ti - tk + 86400(N0 - NA);
λk = λ + (W' - ωЗ)(ТдрW + ΔТ'W2);
п = 2p/Тдр, W = λk + S, S = S0 + ωЗ(tλk - 10800);
где С20 - коэффициент при второй зональной гармонике разложения геопотенциала Земли в ряд по сферическим функциям, равный 1082,63 · 10-6;
ае - экваториальный радиус Земли, равный 6378,136 км;
S0 - истинное звездное время на гринвичскую полночь даты N0, к которой относится время ti;
ωЗ - угловая скорость вращения Земли, равная 0,7292115 · 10-4 с-1;
μ - константа гравитационного поля Земли, равная 398600,44 км3/с2;
3) вычисляют константы интегрирования на момент tλk.
da(m)/a = 2J(ae/a)2(1 - 3/2 sin2 i)(l cos L) + J(ae/a)2sin i (1/2 h sin L - 1/2 l cos L + cos 2λ + 7/2 l cos 3L + 7/2 h sin 3L);
dh(m) = J(ae/a)2(1 - 3/2sin2 i)(lnτ + sin 3L + 3/2 l sin 2L - 3/2 h cos 2L) - 1/4 J(ae/a)2sin2 i(sin L - 7/3 sin 3L + 5l sin 2L - 17/2 l sin 4L + 17/2 h cos 4L + h cos 2L) + J(ae/a)2cos2 i (ln τ - 1/2 l sin 2L);
dl(m) = J(ae/a)2(1 - 3/2sin2 i)(-hnτ + cos L + 3/2 l cos 2L + 3/2 h sin 2L) -1/4 J(ae/a)2sin2 i(-cos L - 7/3 cos 3L - 5h sin 2L - 17/2 l cos 4L - 17/2 h sin 4L + l cos 2L) + J(ae/a)2cos2 i(-hn τ + 1/2 h sin 2L);
dW(m) = J(ae/a)2 cos i (nτ + 7/2 l sin L - 7/2 h cos L - 1/2 sin 2L - 7/6 sin 3L + 7/6 h cos 3L);
di(m) = 1/2 J(ae/a)2 sin i cos i(-1 cos L + h sin L + cos 2L + 7/3 l cos 3L + 7/3 h sin 3L);
dL(m) = 2J(ae/a)2(1 - 3/2 sin i)(nτ + 7/4 l sin L - 7/4 h cos L) + 3J(ae/a)2 sin i (-7/24 h cos L - 7/24 l sin L - 49/72 h cos L + 49/72 l sin 3L + 1/4 sin 2L) + J(ae/a)2 cos i (nτ + 7/2 l sin L - 5/2 h cos L - 1/2 sin 2L - 7/6 l sin 3L + 7/6 h cos 3L),
где L = M + ω;
M= E - ε sin E;
h = ε sin ω;
l = ε cos ω;
m = 1;
τ = 0, J = 3/2 C20, a = а(n) (см. перечисление 1);
4) вычисляют поправки к элементам орбиты НКА на момент времени ti за счет влияния второй зональной гармоники С20:
da = dа(2) - dа(1);
dh = dh(2) - dh(1);
dl = dl(2) - dl(1);
dW = dW(2) - dW(1);
di = di(2) - di(1);
dL = dL(2) - dL(1);
где dа(2), dh(2), dl(2), dW(2), di(2), dL(2) вычисляют для τ = ti - tλk и m = 2 по формуле при L = М + ω + nτ;
5) вычисляют возмущенные элементы орбиты НКА на момент времени ti:
ai = a + da;
hi = h + dh;
li = l + dl;
![]()
Wi = W + dW;
ii = i + di;
Mi = L* - ωi;
L* = M + ω + n(ti - tλk) + dL*;
где i - индекс принадлежности ко времени ti;
6) вычисляют координаты и составляющие вектора скорости НКА в системе координат OXaYaZa на момент времени ti:
Ei(n) = Mi + εsin Ei(n-1);
Ei(0) = Mi;
|Ei(n) - Ei(n-1)| ≤ 10-8;
ui = υi + ωi;
ri = ai(1 - εcos Ei(n));
Xi = ri(cos ui cos Wi - sin uisin Wi cos ii);
Yi = ri(cos ui sin Wi + sin uicos Wi cos ii);
Xi = ri(sin ui sin ii);
Vxi = Vri(cos ui cos Wi - sin ui sin Wi cos ii) - Vui(sin ui cos Wi + cos ui sin Wi cos ii);
Vyi = Vri(cos ui sin Wi + sin ui cos Wi cos ii) - Vui(sin ui sin Wi - cos ui cos Wi cos ii);
Vzi = Vrisin ui sin ii + Vui cos ui sin ii).
Приложение В
(справочное)
Примеры расчета параметров радионавигационного поля
B.1 Общая характеристика системы ГЛОНАСС
Значения исходных данных, используемых при моделировании процесса функционирования системы ГЛОНАСС и планировании сеансов навигационных определений, приведены в разделе 3.
B.2 Параметры рабочей зоны
B.2.1 Рабочей зоной (обслуживаемым пространством) системы ГЛОНАСС считают околоземное пространство до высоты 2000 км, включая поверхность Земли, в котором обеспечивается приемлемая геометрия спутников для местоопределения потребителя, начиная с заданного угла места, выраженное в процентах времени за сутки, в течение которого обеспечивается приемлемая геометрия для местоопределения по четырем и более спутникам.
ПКА системы ГЛОНАСС из 24 КА выбрана с целью оптимизации рабочей зоны системы в широком диапазоне рабочих условий.
В частности, ПКА обеспечивает непрерывное навигационное поле с определенной геометрией и углом места, минимальную чувствительность поля к изменению орбитальных характеристик и ослабление влияния выхода из строя отдельных спутников на надежность навигационного обеспечения.
B.2.2 Выбранные параметры орбиты и возможности точного выведения спутников в орбитальные точки позволяют осуществлять эксплуатацию спутника без корректирования орбиты в течение всего срока его эксплуатации.
Выбранный период обращения орбиты 11 ч 45 мин 43 с имеет интервал повторяемости условий наблюдения 8 сут, однако незначительные отклонения этого периода от синхронного позволяют с достаточной степенью достоверности осуществлять моделирование процесса функционирования системы в течение 24 ч.
Рабочая зона рассчитана для ПКА системы ГЛОНАСС, состоящей из 24 активных радионавигационных точек, по правилу: число видимых спутников больше трех и PDOP равен или менее шести. При этом потребители расположены на поверхности Земли, а пороговый угол места спутников равен 5°.
B.2.3 Плотность распределения видимых спутников показана на рисунке В.1. Рабочая зона системы ГЛОНАСС выражена вероятностью наличия более трех видимых спутников и PDOP ≤ 6 в любой точке рабочей зоны системы ГЛОНАСС и равна 0,999881 (в среднем по Земле).
Ухудшение значений по рабочей зоне для системы ГЛОНАСС наблюдается в широтном поясе 23° - 28°:
на широте 24° - 0,9999;
на широте 27° - 0,9974;
на всех прочих широтах - 1,0.
Данные характеристики рабочей зоны распространяются на всю поверхность Земли.
Поскольку спутники системы ГЛОНАСС обеспечивают излучение навигационных сигналов в телесном угле, равном примерно ±19°, то рабочая зона увеличивается до высоты ~ 2000 км. Учитывая, что зона активного поглощения энергии навигационных радиосигналов расположена до высоты ~ 200 км, можно предположить, что до этой высоты будут сохраняться характеристики рабочей зоны, указанные на рисунке В.1.
B.2.4 Потребители, работающие в диапазоне высот от 200 до 2000 км могут работать со спутниками с углов места 0° и даже отрицательных углов, что существенно увеличивает число видимых спутников, улучшает геометрию определения местоположения потребителя и, как правило, улучшает характеристики рабочей зоны.
B.2.5 Для ПКА из 21 спутника в рабочей зоне системы ГЛОНАСС вероятность наличия более трех видимых спутников и PDOP ≤ 6 в любой точке будет не менее 0,98 (в среднем по Земле).
B.3 Характеристики доступности
В.3.1 Доступность (эксплуатационная готовность) определяется готовностью спутников излучать пригодные навигационные сигналы в зоне действия системы при выполнении требований 3.2 и размере рабочей зоны в момент определения доступности. Доступность выражают в процентах времени определенного временного интервала.
Для определения значения доступности необходимо учитывать все факторы, влияющие на подготовку спутников работе в интервале времени, гарантирующем периодическое повторение этих факторов в процессе эксплуатации системы ГЛОНАСС.
Основным фактором, влияющим на значение доступности, является отсутствие установленного числа спутников ПКА в течение некоторого интервала времени.
В процессе эксплуатации системы ГЛОНАСС такие ситуации могут возникать по следующим причинам:
- неподготовленность спутника ПКУ;
- выход спутника из строя;
- замена вышедших из строя спутников.
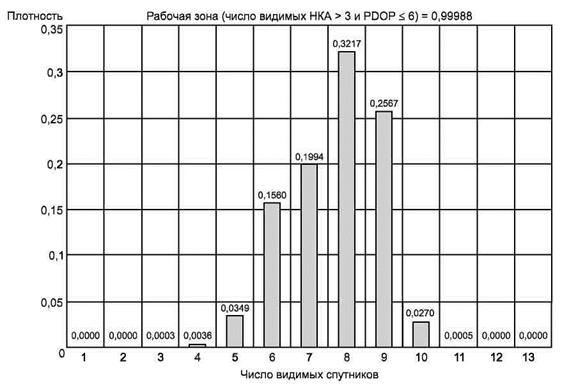
Рисунок В.1 - Плотность распределения числа видимых спутников для системы ГЛОНАСС, состоящей из 24 НКА
Поскольку в ПКУ все средства и операции по подготовке НКА к навигационному обеспечению зарезервированы, то считают, что ПКУ обеспечивает подготовку каждого работоспособного НКА со 100 %-ной надежностью.
При выходе НКА из строя ПКУ за время не более 3 - 5 сут обеспечивает восстановление работоспособности НКА.
В.3.2 Если НКА не может быть восстановлен, ПКУ принимает решение о замене вышедшего из строя НКА новым из орбитального резерва или о запуске блока из трех НКА. При использовании общепринятой технологии замены в орбитальном резерве в каждой орбитальной плоскости может оказаться до двух резервных НКА. Поэтому в установившемся режиме эксплуатации системы ГЛОНАСС из каждых трех заменяемых спутников два заменяют спутниками из орбитального резерва, а один - из очередной группы спутников.
При замене спутника на спутник из орбитального резерва интервал времени с момента принятия решения о прекращении эксплуатации спутника до ввода в систему резервного спутника равен 20 сут, а при замене на спутник, запускаемый с Земли, - 30 - 50 сут. Таким образом, среднее время каждой замены спутника равно 30 сут.
По существующим статистическим данным об эксплуатации спутников ГЛОНАСС среднее время их активного существования - 4 г. Следовательно, для поддерживания ПКА из 24 спутников необходимо каждый год выводить на орбиту шесть спутников.
Для равномерности процесса замены через каждые 2 мес необходимо проводить замену одного спутника.
В соответствии с этими условиями работы системы ГЛОНАСС, характеристики доступности системы могут быть определены при среднеарифметическом значении результатов в интервале 2 мес (60 сут). Среднее значение доступности по рабочей зоне за 60 сут равно 0,9964 с учетом выполнения вышеперечисленных требований по управлению и замене спутников ПКА.
Характеристики доступности системы ГЛОНАСС могут быть определены при среднеарифметическом значении результатов за 2 мес (60 сут). Оценка усредненного по поверхности Земли значения доступности составляет 0,9964 с учетом выполнения требований к управлению и восполнению ПКА.
В.4 Надежность обслуживания
Среднее значение надежности оборудования за сутки определяют по следующим параметрам:
- пороговая ошибка местоопределения в плане 140 м определена при условии обеспечения доступности обслуживания 0,9964 и точности местоопределения в плане с доверительной вероятностью Р = 0,9999;
- время отказа 18 ч определено размерами зоны обслуживания ПКУ и производительностью его технических средств;
- среднее значение надежности определено за период 1 г. путем определения среднего значения за сутки по рабочей зоне.
В ходе моделирования использовались статистические данные о надежности функционирования НКА в 1996 г. Для НКА, выработавших свой ресурс, коэффициенты готовности по результатам эксплуатации были несколько ниже гарантированного значения 0,978, и в процессе моделирования было принято гарантированное значение 0,978.
В.5 Погрешность местоопределения
B.5.1 Погрешность местоопределения, которая может быть определена с помощью системы ГЛОНАСС, вычисляют как разность измеренного и действительного положений потребителя в рабочей зоне системы с заданным уровнем доступности и надежности. Погрешность местоопределения выражают в процентах времени за определенный период, в течение которого система ГЛОНАСС соответствует требованиям настоящего стандарта.
B.5.2 Прогнозируемая погрешность местоопределения
Прогнозируемая погрешность местоопределения в системе ГЛОНАСС, полученная при моделировании функционирования системы в интервале 48 ч с дискретностью 1 мин для 4732 географических точек, равномерно распределенных по поверхности Земли, представлена в таблице В.1.
Таблица В.1 - Прогнозируемая погрешность местоопределения
|
Значения для доверительной вероятности, в метрах |
||
|
0,95 |
0,9999 |
|
|
По широте |
20 |
98 |
|
По долготе |
21 |
100 |
|
По высоте |
60 |
585 |
|
В горизонтальной плоскости |
28 |
140 |
Местоположение потребителя определяют по измерениям навигационных параметров на частоте L1.
В.5.3 Погрешность передачи времени потребителю
На спутниках системы ГЛОНАСС в течение 12 ч ПКУ осуществляет синхронизацию бортовых шкал времени спутников с погрешностью взаимной синхронизации двух любых КА не более 20 не (среднеквадратичное значение погрешности) относительно шкалы времени центрального синхронизатора, формирующего шкалу времени системы ГЛОНАСС.
Привязку шкалы времени системы ГЛОНАСС к шкале UTC(SU) Государственного эталона осуществляют с погрешностью не более 1 мкс (предельное значение погрешности).
Таким образом, погрешность передачи времени UTC(SU) потребителю должна быть не более 700 нс в течение 95 % времени.
Библиография
|
Интерфейсный контрольный документ по глобальной навигационной спутниковой системе ГЛОНАСС, 5-я редакция. М.: КНИЦ Минобороны, 2002 |
|
|
Система геодезических параметров Земли «Параметры Земли 1990 г.» (ПЗ-90). М.: КНИЦ Минобороны, 1998 |
|
|
Приложение 10 к Конвенции о международной гражданской авиации, т-1. М.: Радионавигационные средства, ИКАО, 2002 |
|
|
[4] |
Спецификация сигнала стандартной службы местоопределения, 2-е издание, Минобороны США, 1995 |
|
ICD-GPS-200 Interface Control Document, 2000 |
Ключевые слова: параметры навигационного поля глобальной навигационной спутниковой системы ГЛОНАСС, технические требования, методы испытаний, определение координат местоположения