РОССИЙСКОЕ
АКЦИОНЕРНОЕ ОБЩЕСТВО
ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ «ЕЭС РОССИИ»
ДЕПАРТАМЕНТ НАУКИ И ТЕХНИКИ
ТЕХНИЧЕСКИЕ
ТРЕБОВАНИЯ
К МОДЕРНИЗАЦИИ СИСТЕМ КОНТРОЛЯ
И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ
ОБОРУДОВАНИЕМ
РД 34.35.134-96

ОРГРЭС
Москва 1998
Разработано АО «Фирма ОРГРЭС» и АО «Теплоэлектропроект» по поручению Департамента науки и техники РАО «ЕЭС России» и являются собственностью РАО
Исполнители Л.Н. КАСЬЯНОВ, Н.И. ЧУЧКИНА (АО «Фирма ОРГРЭС»); Ю.М. РАЗЮПИН (АО «Теплоэлектропроект»)
Утверждено Департаментом науки и техники РАО «ЕЭС России» 18.01.96 г.
Начальник А.П. БЕРСЕНЕВ
|
ТЕХНИЧЕСКИЕ
ТРЕБОВАНИЯ |
РД 34.35.134-96 Введены впервые |
Вводятся в действие
с 01.04.1998 г.
В данной работе рассмотрены вопросы модернизации системы контроля и управления (СКУ) первого уровня в части тепломеханического оборудования энергоблоков и тепловых электростанций (ТЭС) с поперечными связями. Аббревиатурой СКУ обозначается система контроля и управления, реализованная на любых технических средствах. Аббревиатурой АСУ ТП будут обозначаться СКУ, имеющие в своем составе информационно-вычислительную систему, реализованную на средствах вычислительной техники.
1. ВАРИАНТЫ МОДЕРНИЗАЦИИ СИСТЕМ КОНТРОЛЯ И УПРАВЛЕНИЯ
1.1. Проблема модернизации СКУ действующих энергоустановок возникает при:
реконструкции основного оборудования энергоустановки;
выработке ресурса технических средств СКУ, их физическом износе и моральном старении;
функциональной недостаточности существующей СКУ, необходимости придания ей дополнительных свойств, не предусмотренных первоначальным проектом.
Как правило, указанные факторы присутствуют одновременно, поэтому задачу модернизации СКУ следует решать в комплексе с учетом всех перечисленных выше факторов.
1.2. Выбор варианта модернизации СКУ производится электростанцией (энергосистемой) в зависимости от типа оборудования, предполагаемых сроков и режимов его работы, состояния существующих технических средств СКУ, располагаемых финансовых средств и других факторов.
При всех случаях суммарный эффект (технический, экономический, социальный), ожидаемый от модернизации СКУ по выбранному варианту, должен быть по меньшей мере соизмерим с затратами на его внедрение и эксплуатацию.
1.3. Различают три основных варианта модернизации СКУ:
полная замена технических средств СКУ;
замена отдельных подсистем СКУ;
замена отдельных элементов СКУ.
1.4. До начала модернизации должны быть определены:
состояние технических средств существующей СКУ и располагаемый ресурс работы ее отдельных составляющих;
располагаемый ресурс и ожидаемая продолжительность работы энергоустановки в целом с учетом планируемых реконструкций и продлений срока службы;
предполагаемые режимы работы энергоустановки в этот период;
участие энергоустановки в поддержании параметров энергосистемы в нормальных и аварийных режимах работы энергосистемы;
объем и функции модернизированной СКУ;
вариант модернизации СКУ;
технические средства для модернизации СКУ.
1.5. Рабочий ресурс технических средств СКУ может быть определен по данным заводов-изготовителей. Для предварительной оценки объемов и сроков замен отдельных видов технических средств и кабельных связей рекомендуется пользоваться таблицей приложения.
Окончательные данные для выбора варианта модернизации могут быть получены только по результатам детального обследования состояния СКУ на энергоустановке. При этом должны учитываться как технические, так экономические и социальные факторы.
Ниже приводятся некоторые общие рекомендации, которыми следует руководствоваться при выборе варианта модернизации СКУ.
1.6. При выборе варианта модернизации СКУ следует исходить из того, что модернизированная СКУ должна функционировать до полной выработки ресурса энергоустановки, практически исчерпав свой собственный рабочий ресурс.
1.7. Вариант с полной заменой технических средств СКУ целесообразно применять при:
а) полной замене основного оборудования энергоустановки или значительной его части (котел, турбина);
б) реконструкции энергоустановки, предусматривающей существенные изменения технологической схемы и режимов работы энергоустановки (например, переделка паросиловой установки в парогазовую, перевод котла на сжигание нового вида топлива и т.п.);
в) ожидаемой выработке ресурса существующей СКУ за 7 - 10 лет до окончания предполагаемого срока службы энергоустановки.
При этом варианте модернизации к СКУ должны предъявляться такие же требования, как и для вновь проектируемых систем контроля и управления.
1.8. Вариант модернизации СКУ с заменой отдельных подсистем целесообразно применять при:
а) частичной реконструкции основного оборудования, не связанной с коренными изменениями технологического процесса и назначения энергоустановки (замена насосов, тягодутьевой установки, поверхностей нагрева котла и т.п.);
б) возможности сохранить работоспособность хотя бы половины подсистем СКУ за счет ремонтов и эквивалентных замен технических средств до окончания срока службы энергоустановки;
в) необходимости расширить функции отдельных подсистем СКУ (например, за счет автоматизации пусковых режимов, регулирования частоты и мощности в энергосистеме и т.п.).
При этом варианте модернизации СКУ к модернизируемым подсистемам должны предъявляться требования как к вновь проектируемым.
1.9. Вариант модернизации путем замены отдельных элементов СКУ следует применять в тех случаях, когда оставшийся рабочий ресурс СКУ в целом и ее отдельных подсистем соизмерим с располагаемым ресурсом энергоустановки с учетом возможной реконструкции и продления срока службы. При этом задачей модернизации является поддержание СКУ в работоспособном состоянии в течение этого периода времени путем эквивалентной замены вышедших из строя элементов новыми.
1.10. Выбор технических средств для модернизации СКУ зависит от варианта модернизации и функций, выполняемых модернизированной системой. В настоящее время возможно применение:
распределенных микропроцессорных систем с одной или несколькими информационными магистралями, реализованных на базе различных (отечественных или зарубежных) программно-технических комплексов (ПТК); технические требования к ПТК содержатся в [5];
автономных микропроцессорных контроллеров с функциями автоматического регулирования и логического управления;
автономных информационно-вычислительных комплексов (ИВК) с функциями приема, обработки и представления оперативной информации на цветных графических дисплеях в темпе технологического процесса, расчетов, хранения и документирования неоперативной информации;
традиционных технических средств (показывающих и регистрирующих приборов, сигнализации на световых табло, регуляторов, подсистем защит, блокировок и дистанционного управления на полупроводниковых или релейных элементах).
1.11. При варианте модернизации СКУ с полной заменой технических средств предпочтение следует отдавать распределенным микропроцессорным системам, обеспечивающим выполнение практически всех функций по контролю и управлению энергоустановками любых типов и мощностей с наименьшим количеством датчиков и кабельных связей, наилучшей организацией постов оперативного управления при минимальной по сравнению с другими системами потребности в производственных площадях.
Организация эксплуатации и ремонта этих систем также существенно упрощается за счет применения унифицированных программно-технических модулей, целиком заменяемых при отказах.
1.12. При варианте модернизации СКУ путем замены отдельных подсистем следует использовать для управляющих подсистем автономные микропроцессорные контроллеры (например, ремиконты и ломиконты), а для информационных подсистем - информационно-вычислительные комплексы.
При этом варианте модернизации СКУ, как правило, возникают трудности в организации обмена сигналами между разнородными техническими средствами, что усложняет и делает менее надежной общую схему СКУ.
1.13. При варианте модернизации СКУ путем эквивалентной замены отдельных элементов технических средств используются традиционные технические средства, имеющие рабочие характеристики, идентичные или близкие к заменяемым.
2. ТРЕБОВАНИЯ К СИСТЕМАМ КОНТРОЛЯ И УПРАВЛЕНИЯ ЭНЕРГОУСТАНОВОК ТЕПЛОВЫХ ЭЛЕКТРОСТАНЦИЙ ПРИ ИХ МОДЕРНИЗАЦИИ
Блочные ТЭС оснащаются энергоблоками как с конденсационными, так и с теплофикационными турбоагрегатами.
В свою очередь каждый из указанных типов энергоустановок различается по:
виду сжигаемого топлива: газомазутное, пылеугольное;
типу котла: прямоточный, барабанный;
параметрам свежего пара: среднего, высокого и сверхкритического давления;
термодинамическому циклу: с промперегревом или без него и т.д.
Важное значение для выбора типа СКУ при модернизации имеют режимы работы энергоустановки. Основной парк конденсационных энергоустановок состоит из базовых энергоблоков, предназначенных для работы с регулярными изменениями нагрузки в пределах регулировочного диапазона и ограниченным количеством остановов в резерв в нерабочие дни и ночное время с последующими пусками соответственно из неостывшего и горячего состояний [1]. Фактические режимы работы энергоблока на ТЭС зависят от его типа и условий работы в энергосистеме.
Режимы работы теплофикационных энергоустановок целиком зависят от графика теплопотребления. Основную часть времени они работают в теплофикационном режиме по графику тепловой нагрузки, а в летний период при отсутствии потребителей тепла могут работать в конденсационном режиме.
При работе в теплофикационном режиме приоритетной является тепловая нагрузка (промышленная и теплофикационная). При неполной загрузке регулируемых отборов имеется возможность выработки дополнительной электрической мощности за счет увеличения подачи пара в турбину со сбросом его избытков в конденсатор. В этом случае регулировочный диапазон активной мощности составляет разницу между максимальной электрической мощностью, которую может выдать энергоустановка при данной загрузке отборов пара, и электрической мощностью при расходе пара на турбину, равном суммарному расходу пара через регулируемые отборы. Однако регулирование электрической мощности в этом случае не должно приводить к заметным изменениям расходов и температур пара в регулируемых отборах, т.е. предпочтительным является режим работы по диспетчерскому графику с медленными переходами от одного фиксированного значения электрической нагрузки к другому.
При конденсационном режиме работы энергоустановки она может использоваться как чисто конденсационная и обеспечивать изменение мощности в пределах установленного регулировочного диапазона.
2.2. Выбор функций и технических средств СКУ при модернизации должны производиться с учетом [1]:
маневренных характеристик энергоустановки в целом, определяемых ее типом, составом основного и вспомогательного оборудования, видом сжигаемого топлива, фактическим диапазоном автоматического регулирования;
располагаемых ресурсов по количеству пусков из различных тепловых состояний и аварийных сбросов нагрузки;
ожидаемых режимов работы энергоустановки в энергосистеме.
Ниже приведены технические требования и рекомендации по объему автоматизации и контроля при модернизации СКУ энергоустановок различных типов.
2.3. Система контроля и управления должна обеспечивать надежный контроль и управление технологическим процессом энергоустановки при всех режимах ее работы, а именно: в режимах пуска из любого теплового состояния, планового останова, при нормальной работе в регулировочном диапазоне, при аварийных ситуациях.
2.4. Система контроля и управления должна выполняться как автоматизированная. При ее функционировании активная роль принадлежит одному или нескольким операторам-технологам. Соответственно в структуре СКУ для операторов должны быть предусмотрены рабочие места, оснащенные средствами информации о состоянии оборудования и параметрах технологического процесса, а также средствами дистанционного управления механизмами собственных нужд, запорными и регулирующими органами и устройствами автоматики.
Функции оператора-технолога зависят от уровня автоматизации технологического процесса. Однако при всех случаях оператор-технолог должен получать полную информацию о состоянии оборудования и протекании технологического процесса и иметь возможность, не покидая своего рабочего места, дистанционно управлять всеми механизмами, запорными и регулирующими органами, активно влияющими на технологический процесс.
2.5. На рисунке представлена укрупненная функциональная схема современной системы контроля и управления энергоустановки ТЭС. Она строится по иерархическому принципу и включает в себя несколько подсистем, объединенных в общую систему с помощью информационных и командных связей. К ним относятся подсистемы:
сбора, первичной обработки и распределения информации;
управления механизмами собственных нужд, запорными и регулирующими органами;
технологических защит (ТЗ) и защитных блокировок (ЗБ);
дистанционного управления (ДУ);
автоматического регулирования (АР);
логического управления (ЛУ);
блочное координирующее устройство (БКУ);
информационная (ИП).
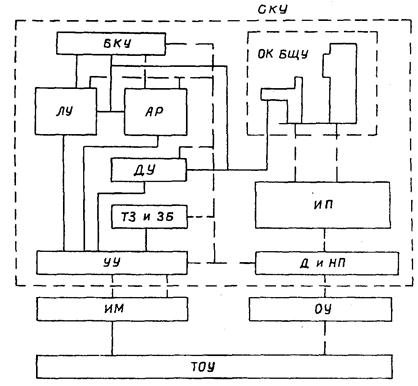
Функциональная структура СКУ:
ТОУ - технологический объект управления; ИМ - исполнительные механизмы; ОУ - отборные устройства; УУ - устройства управления; Д и НП - датчики и нормирующие преобразователи; ТЗ и ЗБ - технологические защиты и защитные блокировки; ду - дистанционное управление; АР - автоматическое регулирование; ЛУ - логическое управление; БКУ - блочное координирующее устройство; ИП - информационная подсистема; ОК БЩУ - оперативный контур БЩУ
2.6. Иерархическое построение позволяет разбить систему управления на уровни по принципу от простого к сложному, при этом отказ более высокого уровня не должен приводить к неработоспособности нижних уровней. Соответственно нижние уровни должны обладать более высоким приоритетом действия.
Высшим приоритетом действия обладает подсистема ТЗ и ЗБ. Вторым по значимости приоритетом обладает подсистема ДУ, т.е. оператор-технолог.
Подсистемы АР и ЛУ относятся к одному и тому же уровню иерархии и обладают одинаковым приоритетом действия.
Блочное координирующее устройство применяется на энергоблоках и реализует свои функции через подсистемы АР и ЛУ, образуя общий верхний уровень этих подсистем.
3. ПОДСИСТЕМА СБОРА, ПЕРВИЧНОЙ ОБРАБОТКИ И РАСПРЕДЕЛЕНИЯ ИНФОРМАЦИИ
3.1. Подсистема включает в себя датчики аналоговых и дискретных сигналов, нормирующие преобразователи, устройства первичной обработки сигналов.
3.2. Датчики аналоговых сигналов разделяются на две группы:
с унифицированным выходным сигналом;
с «натуральным» (неунифицированным) выходным сигналом.
В современных системах, как правило, используются унифицированные сигналы постоянного тока 4 - 20 мА, позволяющие осуществлять контроль целостности электрических цепей датчиков наиболее простым способом. Датчики, формирующие такие сигналы, подключаются к входным устройствам потребителей без промежуточных преобразователей и обеспечивают многократное использование своего сигнала у различных потребителей.
«Натуральные» сигналы от датчиков (термопреобразователи, датчики нестандартных измерений), как правило, требуют дополнительного преобразования в унифицированные сигналы с помощью специальных нормирующих преобразователей. Устройства связи с объектом (УСО) программно-технических средств должны включать в себя нормирующие преобразователи стандартных термопар и термометров сопротивления.
В СКУ, построенных на разнородных технических средствах, целесообразно применять автономные нормирующие преобразователи, позволяющие использовать выходной унифицированный сигнал преобразователя в различных подсистемах.
3.3. Первичная обработка аналоговых сигналов в СКУ, реализуемых на программно-технических средствах, должна включать в себя как минимум следующие функции [5]:
циклический контроль достоверности сигнала;
контроль отклонения измеряемого параметра за допустимые пределы (до четырех уставок);
замену недостоверного сигнала достоверным для дублированных датчиков;
операцию извлечения корня;
коррекцию значения параметра по заданному алгоритму.
Для сигналов термопреобразователей кроме того должна выполняться линеаризация характеристик в соответствии со стандартными градуировками, а для термопар - вводиться поправка на температуру холодных спаев.
3.4. Дискретные сигналы формируются контактными устройствами в схемах управления запорных и регулирующих органов, механизмов собственных нужд, двухпозиционных датчиков. В большинстве случаев это сигналы переменного или постоянного тока напряжением 220 В. Приемники этих сигналов должны быть рассчитаны на их восприятие без дополнительных преобразователей, не входящих в состав данных технических средств.
3.5. Схема распределения сигналов по подсистемам СКУ зависит от способа их технической реализации.
подсистема ТЗ и ЗБ оснащается полным комплектом автономных датчиков для каждого измерительного канала. При этом один и тот же измерительный канал может использоваться для разных защит. Для устройств ввода-вывода защит могут быть использованы датчики информационной подсистемы;
подсистемы АР и ЛУ оснащаются автономными датчиками по одному на каждый измеряемый параметр с резервированием наиболее ответственных измерений по цифровой магистрали из подсистемы ТЗ и ЗБ, а при отсутствии в ней такого измерения - вторым датчиком;
информационная подсистема оснащается автономными датчиками по одному на каждый измеряемый параметр с резервированием наиболее ответственных измерений по цифровой магистрали из подсистемы ТЗ и ЗБ.
3.5.2. Для остальных СКУ, реализованных на разнородных технических средствах, рекомендуется вариант:
подсистема ТЗ и ЗБ выполняется аналогично п. 3.5.1;
подсистемы АР и ЛУ оснащаются автономными датчиками унифицированного сигнала и нормирующими преобразователями по одному на каждое измерение, обеспечивающими многократное использование сигналов в пределах этих подсистем. При реализации этих подсистем на программируемых контроллерах дублирование измерений в пределах контроллера не предусматривается, если оно не обусловлено требованиями надежности;
информационная подсистема оснащается автономными датчиками по одному на каждый измеряемый параметр.
4. ПОДСИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗМАМИ СОБСТВЕННЫХ НУЖД, ЗАПОРНЫМИ И РЕГУЛИРУЮЩИМИ ОРГАНАМИ
4.1. Подсистема должна обеспечивать:
прием управляющих команд от подсистем блочного уровня управления;
формирование команд на включение\отключение выключателей электродвигателей собственных нужд, исполнительных механизмов запорных и регулирующих органов в соответствии с установленными приоритетами подсистем, выдавших управляющие команды;
прием и выдачу информации о состоянии объекта управления.
4.2. Типовыми объектами управления энергоустановки являются:
механизмы собственных нужд (насосы, дымососы, вентиляторы и др.);
запорные органы с электроприводом (задвижки, шиберы, заслонки);
отсечные и предохранительные клапаны - регулирующие клапаны, направляющие аппараты, гидромуфты, станции регулирования частоты вращения электродвигателей топливоподающих устройств, насосов, тягодутьевых машин.
4.3. Устройства управления этими объектами могут выполняться на релейных, полупроводниковых или микропроцессорных программируемых технических средствах. При выборе устройств управления для конкретной СКУ необходимо руководствоваться правилом их совместимости с другими элементами системы, с которыми они взаимодействуют:
управляющие команды от других подсистем должны быть согласованы по уровню напряжения и мощности и подаваться на входные устройства по возможности без промежуточных преобразователей;
напряжение и мощность выходных команд должны обеспечивать надежное управление пусковыми устройствами без промежуточных усилителей;
информационные сигналы также должны восприниматься непосредственно потребителями без дополнительных преобразований.
4.4. Устройства управления электродвигателями (УУД) механизмов собственных нужд (с.н.) должны быть рассчитаны на:
а) прием команд на включение\отключение от подсистем технологических защит и защитных блокировок:
дистанционного управления с главного и местных постов управления и кнопки аварийного останова по месту;
логического управления;
б) прием информационных сигналов:
«включен»\«отключен» - от блок-контактов выключателя механизма;
способ управления: «дистанционно» или «автоматически» - от переключателя (клавиатуры) выбора способа управления, расположенного на посту управления.
Схема УУД должна обеспечивать приоритетное выполнение команд от подсистемы ТЗ и ЗБ и кнопки аварийного останова механизма с.н. При этом команды от других подсистем должны блокироваться.
При дистанционном управлении команды от подсистемы логического управления должны блокироваться и наоборот при автоматическом способе управления должны блокироваться команды подсистемы дистанционного управления.
При выборе механизма с.н. в качестве резервного один из входов его устройства управления подключается к схеме АВР. При ее срабатывании на этот вход поступает команда - «включить механизм», если отсутствует противоположная команда от ТЗ и ЗБ.
На пост управления оператору-технологу должна выводиться следующая информация о состоянии механизма с.н.:
включен в работу;
выбран в резерв;
отключен оператором;
отключен автоматически (защитой или ЛУ);
включен автоматически (АВР или ЛУ);
ток электродвигателя (при необходимости);
способ управления: «дистанционно», «автоматически» от ЛУ.
Автоматические включение и отключение электродвигателя должны сопровождаться акустическим и световым сигналами на главном посту управления.
4.5. Устройства управления запорными задвижками (УУЗ) должны быть рассчитаны на:
а) прием команд типа «открыть», «закрыть», «стоп» от подсистем:
технологических защит и защитных блокировок;
дистанционного управления;
логического управления;
б) прием информационных сигналов:
«открыт»\«закрыт» - от концевых выключателей напряжением 220 В переменного тока не менее 50 мА;
способ управления: «дистанционно» или «автоматически» - от переключателя (клавиатуры) выбора способа управления;
«отсутствует электропитание» - от автоматов питания.
Схема УУЗ должна обеспечивать приоритетное выполнение команд от подсистемы ТЗ и ЗБ. При этом команды от других подсистем должны блокироваться.
В УУЗ должны быть предусмотрены блокировки, запрещающие прохождение команд от ЛУ при дистанционном способе управления, и наоборот запрещающие прохождение команд от ДУ при автоматическом способе управления.
На выходе УУЗ должны формироваться электрические команды на включение\отключение пускового устройства исполнительного механизма задвижки. По значениям напряжения и мощности (току) эти команды должны соответствовать техническим условиям на пусковое устройство.
На пост управления оператору-технологу должна выводиться следующая информация о состоянии задвижки:
«закрыта»;
«открыта»;
«стоит в промежуточном положении»;
«открывается»;
«закрывается»;
«неисправность»;
способ управления: «дистанционно» или «автоматически».
4.6. Устройство управления предохранительными и отсечными клапанами с электромагнитным приводом (УУС) должно быть рассчитано на:
а) прием команд типа «открыть»\«закрыть» от подсистем:
технологических защит и защитных блокировок;
дистанционного управления;
логического управления;
б) прием информационных сигналов:
«открыт»\«закрыт» - от концевых выключателей клапана напряжением 220 В переменного или постоянного тока не менее 50 мА;
способ управления «дистанционно» или «автоматически» - от переключателей (клавиатуры) выбора способа управления;
«отсутствует электропитание» - от автоматов питания.
Схема УУС должна обеспечивать приоритетное выполнение команд от подсистемы ТЗ и ЗБ, при этом команды от других подсистем должны блокироваться.
В УУС должны быть предусмотрены блокировки, запрещающие прохождение команд от ЛУ при дистанционном способе управления, и наоборот запрещающие прохождение команд от ДУ при автоматическом способе управления.
На выходе УУС должны формироваться электрические команды на включение\отключение или частичное уменьшение напряжения с электромагнитов открытия\закрытия клапана в соответствии с его алгоритмом управления. По значениям напряжения и мощности эти команды должны соответствовать техническим условиям на управление электромагнитами этих клапанов.
На пост управления оператору-технологу должна выводиться следующая информация о состоянии клапана:
«открыт»;
«закрыт»;
«неисправность»;
способ управления: «дистанционно» или «автоматически».
4.7. Устройство управления регулирующим органом (УУР) с электроприводом должно быть рассчитано на:
а) прием команд типа «прибавить», «убавить» от подсистем:
технологических защит и защитных блокировок;
дистанционного управления;
автоматического регулирования;
логического управления;
б) прием информационных сигналов:
«открыт»\«закрыт» - от концевых выключателей напряжением 220 В переменного тока не менее 30 мА;
способ управления: «дистанционно» или «автоматически» - от переключателя (клавиатуры) выбора способа управления;
«отсутствует электропитание» - от автоматов питания.
Схема УУР должна обеспечивать приоритетное выполнение команд от подсистемы ТЗ и ЗБ, при этом команды от других подсистем должны блокироваться.
В зависимости от типа исполнительного механизма регулирующего органа на выходе УУС должны формироваться дискретные (импульсные) или аналоговые электрические сигналы, управляющие его пусковым устройством или непосредственно электродвигателем (например, СБР питателей пыли). Параметрические характеристики этих сигналов (напряжение, ток, мощность, частота импульсов) должны соответствовать техническим условиям устройства, на которое они воздействуют.
На пост управления оператору-технологу должна выводиться следующая информация о состоянии регулирующего органа:
степень открытия (как правило, в процентах от максимальной) по возможности с индикацией крайних положений;
способ управления: «дистанционно» или «автоматически»;
«неисправность» (с расшифровкой или без расшифровки характера неисправности).
5. ПОДСИСТЕМА ТЕХНОЛОГИЧЕСКИХ ЗАЩИТ И ЗАЩИТНЫХ БЛОКИРОВОК
5.1. Технологические защиты обеспечивают безопасную работу оперативного персонала и теплоэнергетического оборудования путем экстренного автоматического перевода защищаемого оборудования в безопасное состояние в случае возникновения аварийной или предаварийной ситуации. Защитные блокировки, как правило, предотвращают возникновение аварийных ситуаций, в которых должны срабатывать ТЗ, отключающие оборудование.
Типовые объемы и технические условия на выполнение технологических защит содержатся в [2, 3, 4]. Защитные блокировки выполняются в соответствии с требованиями действующих Правил безопасности в газовом хозяйстве и Правил взрывобезопасности при сжигании мазута в котельных установках.
5.2. Технологические защиты группируются по характеру действия:
на останов блока (только для блочных установок);
на останов турбины;
на останов котла;
на останов питательного насоса;
на снижение нагрузки блока до 50 %, 30 % номинальной, нагрузки собственных нужд или холостого хода турбины (только для блочных установок);
на снижение нагрузки котла;
производящие локальные операции.
В целях повышения надежности основные защиты должны выполняться по схемам «два из трех», «два из двух», «один из двух».
5.3. Подсистема ТЗ и ЗБ выполняет следующие функции:
контроль появления признаков возникновения аварийных и предаварийных ситуаций: отклонений аналоговых сигналов до заданных значений (уставок срабатывания), появления заданного состояния дискретных сигналов или их заданного сочетания;
контроль наличия условий срабатывания ТЗ и ЗБ: наличия разрешения на срабатывание, истечения заданной выдержки времени;
формирование команды на выполнение соответствующего алгоритма действия: определенного набора команд на исполнительные устройства;
формирование информации в другие подсистемы СКУ.
5.4. Технические средства, используемые для реализации подсистемы ТЗ и ЗБ, должны быть серийно выпускаемыми, адаптированными к решению конкретных задач ТЗ и ЗБ, удовлетворяющими требованиям по надежности, живучести и ремонтопригодности, предъявляемым к подсистеме ТЗ и ЗБ.
До сих пор подсистема ТЗ и ЗБ на ТЭС Российской Федерации реализовывалась на релейных элементах (УКТЗ) или полупроводниковых средствах с «жесткой логикой» (УКТС). В настоящее время рядом западных фирм применяются для этой цели микропроцессорные контроллеры повышенной надежности. Имеются разработки подсистемы ТЗ и ЗБ на отечественных средствах микропроцессорной техники (например, КВИНТ).
Применение микропроцессорной техники для реализации подсистемы ТЗ и ЗБ дает следующие преимущества по сравнению с традиционными способами:
возможность непрерывного контроля достоверности входных сигналов с сигнализацией и регистрацией неисправности отдельных датчиков или каналов контроля;
повышение достоверности входных сигналов за счет непрерывного сравнения между собой аналоговых сигналов от нескольких датчиков одного параметра с выявлением неисправного датчика и изменением при этом алгоритма формирования входного сигнала по этому параметру;
возможность наложения запрета на срабатывание или действие ТЗ при обнаружении недостоверности входного сигнала;
возможность контроля выдачи команд на исполнительные устройства ТЗ с сигнализацией и регистрацией факта отсутствия команды на любое устройство;
возможность контроля выполнения команд по факту и во времени;
самодиагностика технических средств с сигнализацией и регистрацией отказов, с указанием отказавшего элемента;
возможность санкционированного контроля состояния любого датчика или алгоритма с выдачей информации на экран дисплея;
возможность санкционированного изменения уставок срабатывания, выдержек времени, состояния ремонтного вывода с пульта оператора с регистрацией внесенных изменений;
возможность фиксации времени всех регистрируемых событий;
сокращение габаритных размеров при расширении функций.
5.5. При модернизации СКУ по варианту с полной заменой технических средств подсистему ТЗ и ЗБ целесообразно выполнять в виде микропроцессорной подсистемы повышенной надежности, интегрированной в общую систему контроля и управления.
5.6. При модернизации СКУ по варианту с заменой отдельных подсистем, включая подсистему ТЗ и ЗБ, последняя может быть реализована в виде автономной подсистемы как на средствах вычислительной техники, так и на традиционных технических средствах.
6. ПОДСИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
Все механизмы собственных нужд, запорные и регулирующие органы, предохранительные и отсечные клапаны, снабженные электроприводом любого типа, должны иметь дистанционное управление.
Подсистемы автоматического регулирования, логического управления, блочное координирующее устройство также должны иметь средства дистанционного управления для ввода их в работу, отключения, изменения задания и т.п.
6.1. Различаются следующие основные виды дистанционного управления энергоустановкой:
а) по характеру действия:
индивидуальное;
избирательное;
комбинированное;
групповое;
б) по размещению органов управления:
с главного поста управления (БЩУ, ГрЩУ);
с местного щита управления (МЩУ);
по месту.
6.2. При индивидуальном дистанционном управлении командa от органа управления (ключа, кнопок) должна поступать непосредственно на устройство управления, благодаря чему обеспечиваются высокие оперативность и надежность ее передачи. Однако при большом количестве объектов управления применение индивидуального дистанционного управления должно быть ограничено, в противном случае это приведет к неоправданному увеличению размеров оперативного контура поста управления.
6.3. Схема избирательного дистанционного управления предусматривает установку одного командного органа на группу объектов управления. Выбор нужного объекта осуществляется оператором с поста управления, при этом с помощью специальной схемы устройство управления выбранного объекта подключается к командному органу. При этом оператор должен получить информацию о том, что вызов нужного объекта состоялся, после чего он может приступить к управлению им. Этот способ ДУ менее оперативен и надежен, чем индивидуальный, однако он позволяет наилучшим образом решить компоновку главного поста управления.
Существует три основных типа избирательного управления:
с предметным вызовом объекта управления;
с номерным вызовом;
с комбинированным вызовом.
6.3.1. В подсистеме ДУ с предметным вызовом для каждого объекта управления на пульте устанавливается кнопка вызова со световым индикатором, подтверждающим, что вызов объекта состоялся. На группу объектов управления (обычно 50 - 70 шт.) устанавливается один командный орган (ключ, кнопки), переключатель способа управления («дистанционно», «автоматически»), индикаторы состояния двухпозиционных объектов управления, указатель положения регулирующих органов и амперметр.
Подсистема ДУ с предметным вызовом не нашла широкого распространения на электростанциях России и, как правило, не должна применяться при модернизации СКУ энергоустановок.
6.3.2. В подсистеме ДУ с номерным вызовом каждому объекту управления присваивается свой трехзначный абонентский номер. На каждую группу объектов управления (до 99 шт.) на пульте управления устанавливаются двухдекадные номеронабиратели, с помощью которых оператор может «вызвать» любой объект из данной группы. Как правило, при таком способе ДУ на главном посту управления устанавливается информационная мнемосхема всех объектов управления с их номерами (первая цифра указывает номер номеронабирателя, две других - номер органа управления в группе) и световыми индикаторами, с помощью которых индицируется факт вызова объекта, а также состояние двухпозиционных объектов («включен», «отключен», «открыт», «закрыт»).
Как и в предыдущем случае, на каждую группу объектов управления устанавливаются: командный орган, переключатель способа управления, указатель положения регулирующих органов и амперметр. При индикации состояния всех двухпозиционных объектов на мнемосхеме групповые индикаторы на пульте могут не устанавливаться.
Подсистема ДУ с номерным вызовом широко используется на энергоустановках большой и средней мощности и рекомендуется к применению в тех случаях, когда для этой цели не используются средства вычислительной техники.
6.3.3. Подсистема ДУ с комбинированным вызовом применяется в СКУ, реализованных на средствах вычислительной техники, где основным средством представления информации оператору и выдачи управляющих команд являются дисплейные терминалы с цветными графическими дисплеями и функциональными клавиатурами.
В современных микропроцессорных системах дистанционное управление может осуществляться с помощью функциональной клавиатуры путем набора нужного номера устройства, управляющего курсором непосредственно с экрана монитора сенсорным способом. При использовании клавиатуры реализуется номерной, а при использовании курсора или сенсорного экрана - предметный способы вызова объекта управления. Индикация вызова и состояний объекта управления осуществляется на том же экране.
В распределенной микропроцессорной системе с общей магистралью с одного дисплейного терминала можно управлять всеми объектами энергоустановки. При установке нескольких терминалов за ними закрепляются отдельные участки энергоустановки (котел, турбина), при этом в случае отказов терминалы могут резервировать друг друга.
Подсистема ДУ с комбинированным вызовом является универсальной избирательной подсистемой и должна применяться во всех случаях, когда энергоустановка оснащается распределенной микропроцессорной управляющей системой. Она может выполняться также в виде автономной подсистемы дистанционного управления с использованием индивидуальных микропроцессорных контроллеров. При этом для индикации вызова объекта управления и его состояний могут быть использованы как отдельные дисплейные терминалы, так и терминалы информационно-вычислительной системы, если таковая имеется.
6.4. Групповое дистанционное управление используется для управления несколькими объектами (обычно задвижками) одним командным органом. При этом могут применяться как простейшие программы, когда одна и та же команда подается сразу на несколько устройств управления (например, команда открыть\закрыть задвижки на группе дренажей), так и более сложные программы, определяющие логическую последовательность открытия и закрытия задвижек (например, открыть задвижку А и после ее открытия закрыть задвижку Б).
Во всех случаях для отдельных объектов управления, входящих в группу, не предусматривается ни индивидуальное, ни избирательное управление с главного поста. В отдельных случаях может быть предусмотрено управление по месту. Простейшие логические связи устанавливаются на уровне устройств управления без применения дополнительных логических элементов.
В зависимости от технологических условий информация о выполнении поданной команды может выдаваться оператору либо по отдельным органам управления, либо по группе в целом.
6.5. При модернизации СКУ энергоустановок должны применяться все описанные выше виды дистанционного управления в следующем сочетании:
а) на главном посту управления:
индивидуальное ДУ в объеме, обеспечивающем кратковременное удержание энергоустановки на постоянной нагрузке при частичных или полных отказах подсистем автоматического регулирования, избирательного дистанционного управления или информационной подсистемы; экстренный останов энергоустановки оператором при частичном или полном отказе подсистемы ТЗ и ЗБ;
избирательное и групповое ДУ всеми оперативными органами управления (для микропроцессорных систем), кроме органов с индивидуальным ДУ (для прочих систем);
б) на местных щитах управления: индивидуальное ДУ вспомогательными установками и органами управления, не имеющими управления с главного поста;
резервирующее ДУ с главного поста ответственными установками;
в) по месту - индивидуальное ДУ, резервирующее управление с главного поста ответственными органами управления, а также управление неоперативными (ремонтными) запорными органами с электроприводом, не имеющими управления с главного и местных постов.
Все механизмы собственных нужд должны иметь по месту кнопку аварийного отключения.
6.6. В схеме дистанционного управления одним и тем же исполнительным механизмом с двух мест и более должна предусматриваться блокировка, позволяющая управлять только с одного рабочего места.
7. ПОДСИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Подсистема АР предназначена для управления непрерывными процессами и должна обеспечивать поддержание заданных значений параметров технологического процесса и нагрузки энергоустановки.
Выбор функций, структуры и технических средств для подсистемы АР при ее модернизации зависят от типа и предполагаемых режимов работы энергоустановки.
7.1. Подсистема АР базовых конденсационных энергоблоков
В общем случае подсистема АР конденсационного энергоблока должна иметь двухуровневую структуру, включающую:
верхний - блочный уровень, на котором осуществляется автоматическое регулирование частоты и мощности энергоблока (АРЧМ) и формирование непрерывных программ повышения нагрузки и параметров технологического процесса при пусках из различных тепловых состояний (программаторы);
нижний - агрегатный уровень, выполняющий функции регулирования нагрузки и параметров технологического процесса отдельных агрегатов энергоблока.
7.1.1. Подсистема АРЧМ конденсационного энергоблока должна обеспечивать:
а) автоматическое регулирование плановой и неплановой составляющих графика электрической мощности ТЭС в пределах регулировочного диапазона нагрузок энергоблока по заданию от вышестоящего уровня автоматики или оператора блока в следующих режимах управления:
«турбина следует за котлом» (регулятор мощности на котле, регулятор давления «до себя» на турбине);
«котел следует за турбиной» (регулятор мощности на турбине, регулятор давления пара на котле);
«координированное управление котлом и турбиной»;
по схеме САУМ-1 (регулятор нагрузки на котле, регулятор давления на турбине для всех типов блоков) или по схеме САУМ-2 (регулятор мощности на турбине, регулятор давления на котле для оков с барабанными котлами);
б) регулирование частоты в энергосистеме с заданной зоной чувствительности;
в) ограничение скорости изменения нагрузки блока в соответствии с требованиями [1];
г) регулирование активной мощности при работе блока с номинальными и скользящими параметрами пара;
д) формирование сигнала-задания регулятором нижнего уровня с учетом технологических ограничений на блоке;
е) переход на поддержание давления перед турбиной в случаях его снижения до минимально допустимого значения или при срабатывании защит, переводящих блок на промежуточную нагрузку (50 - 60 % номинальной).
выбор программы пуска с учетом исходного теплового состояния оборудования энергоблока;
формирование непрерывных сигналов - заданий на соответствующие регуляторы топлива, давлений и температур свежего и пара промперегрева;
приостанов программ повышения тепловой нагрузки и параметров пара при возникновении технологических ограничений (лимитов);
выдача информации оперативному персоналу о выполнении программы пуска с сигнализацией об ограничениях и сбоях.
7.1.3. Агрегатный уровень подсистемы АР включает в себя подсистемы автоматического регулирования: котла, турбоагрегата, питательных насосов, пускосбросной и общеблочных установок:
а) на этом уровне должна быть обеспечена автоматизация всех технологических процессов, требующих непрерывного управления при работе энергоблока в пределах регулировочного диапазона, при пусках из различных тепловых состояний, при аварийных разгрузках и набросах нагрузки в случаях действия подсистемы ТЗ и ЗБ или противоаварийной автоматики, при плановых и аварийных остановах оборудования;
б) по использованию в различных режимах работы энергоблока подсистемы агрегатных АР подразделяются на:
режимные, используемые при работе блока в пределах регулировочного диапазона;
пусковые, используемые при пусках;
всережимные, используемые как в пусковых, так и в нормальных режимах работы блока.
Режимные и пусковые АР включаются и отключаются оператором при соответствующих режимах работы блока.
Всережимные АР за счет автоматического изменения структуры и параметров настройки работают при всех режимах без вмешательства оператора, выполняя функции и пусковых, и режимных АР. Схемы всережимных АР содержат большое количество аналоговых и дискретных функциональных элементов и существенно сложнее схем режимных и пусковых АР вместе взятых;
в) при аварийных изменениях нагрузки под воздействием технологических защит блока или противоаварийной автоматики все названные выше подсистемы АР должны обеспечивать автоматический переход на новое значение нагрузки с поддержанием технологических параметров в допустимых пределах. При этом по дискретным командам от соответствующих подсистем автоматически должны изменяться задания, параметры настройки и структурные схемы отдельных регуляторов.
7.1.4. При автоматическом регулировании в пределах регулировочного диапазона точность поддержания нагрузки и технологических параметров в установившихся режимах и показатели качества регулирования переходных процессов должны соответствовать ОСТ 108.030.46-85 «Требования к оборудованию энергетических блоков мощностью 300 МВт и выше, определяемые условиями их автоматизации» и согласованным нормативным документам по системам управления мощностью блоков с прямоточными и барабанными котлами.
При аварийных разгрузках под действием технологических защит или аварийных изменениях нагрузки со скоростями и в пределах, соответствующих требованиям [1], должно обеспечиваться качество регулирования, при котором не требуется вмешательство оперативного персонала и отклонения технологических параметров не приводят к срабатыванию технологических защит и блокировок, действующих на останов оборудования.
7.1.5. Схемы автоматических регуляторов любого уровня управления должны предусматривать:
самобалансировку и «безударное» включение АР в работу по командам оператора или логических устройств;
самодиагностику АР с автоматическим отключением и сигнализацией при неисправности;
индикацию включенного и отключенного состояний.
7.1.6. При модернизации подсистемы АР должны учитываться маневренные характеристики и условия работы блока в энергосистеме.
Ориентируясь на технические требования к маневренным характеристикам различных типов энергоблоков, можно дать следующие рекомендации по их использованию в режимах регулирования частоты и мощности в энергосистеме:
а) энергоблоки с пылеугольными котлами при жидком удалении шлака, имеющие нижний предел регулировочного диапазона 70 % номинальной нагрузки и большую инерционность при ее изменении, целесообразно использовать для регулирования плановой составляющей графика электрической нагрузки ТЭС путем поддержания мощности по диспетчерскому графику в пределах регулировочного диапазона.
Подсистема АР таких блоков должна включать в себя:
на блочном уровне - АРЧМ, обеспечивающую поддержание активной мощности на уровне, заданном оператором блока, или ее периодические изменения с установленной скоростью в пределах регулировочного диапазона по заданию оператора блока в соответствии с диспетчерским графиком. Связь АРЧМ с вышестоящими уровнями не предусматривается;
на агрегатном уровне - подсистемы режимных и пусковых АР;
б) энергоблоки с пылеугольными котлами при сухом удалении шлака, имеющие нижний предел регулировочного диапазона 60 - 65 % номинальной нагрузки и меньшую, чем в предыдущем случае, инерционность ее изменения, целесообразно использовать для регулирования плановой и неплановой составляющих графика электрической нагрузки ТЭС в пределах регулировочного диапазона блока.
Подсистема АР таких блоков должна включать в себя:
на блочном уровне - АРЧМ, имеющую канал связи с автоматикой вышестоящего уровня управления и обеспечивающую поддержание активной мощности блока на заданном уровне или ее изменения с установленной скоростью в пределах регулировочного диапазона;
на агрегатном уровне - подсистемы режимных и пусковых АР;
в) энергоблоки с газомазутными котлами, имеющие нижний предел регулировочного диапазона 30 % номинальной нагрузки и наиболее благоприятные динамические характеристики при ее изменении, целесообразно использовать для регулирования плановой и неплановой составляющих графика электрической нагрузки ТЭС в пределах регулировочного диапазона, а также за счет периодических остановов блока в нерабочие дни и ночное время с последующим пуском соответственно из неостывшего и горячего состояний.
Подсистема АР таких блоков должна включать в себя:
на блочном уровне - АРЧМ с каналом связи с вышестоящим уровнем автоматики и программаторы, формирующие программы пуска из различных тепловых состояний блока;
на агрегатном уровне - всережимную подсистему АР.
7.2. Подсистема АР теплофикационных энергоблоков
Структура подсистемы АР теплофикационного энергоблока аналогична структуре АР конденсационного блока: она имеет такую же двухуровневую структуру с блочным и агрегатным уровнями управления. Однако функции этих подсистем существенно различаются (см. п. 2.1).
Теплофикационная турбина представляет собой сложный многосвязный объект управления. Изменение общего расхода пара через клапаны ЧВД приводит к изменению расходов пара в регулируемые отборы и конденсатор, а изменение расхода пара в одном из отборов - к перераспределению расходов между отборами и конденсатором без изменения расхода через ЧВД. Расход пара через теплофикационный отбор может регулироваться диафрагмой ЧНД, перераспределяющей потоки пара в этот отбор и в конденсатор турбины (комбинированный режим управления), или клапанами ЧВД при фиксированном положении диафрагмы ЧНД (тепловой режим) управления. Независимое регулирование электрической мощности в ограниченных пределах при работе регулируемых отборов возможно только в комбинированном режиме.
7.2.1. В общем случае блочный уровень подсистемы АР теплофикационного энергоблока должен быть рассчитан на выполнение следующих функций:
при работе в теплофикационном режиме - регулирование теплофикационной нагрузки или электрической мощности соответственно в тепловом или комбинированном режимах управления;
при работе в конденсационном режиме - регулирование электрической мощности генератора в пределах регулировочного диапазона блока.
При работе блока в теплофикационном режиме могут быть использованы схемы управления, действующие по принципу «турбина следует за котлом» или «координированное управление котлом и турбиной по схеме САУМ-1». При прочих равных условиях предпочтение следует отдавать схеме «турбина следует за котлом». Регулируемым параметром для ведущего агрегата в комбинированном режиме является активная мощность, в тепловом режиме - температура воды за сетевыми подогревателями.
При работе блока в конденсационном режиме могут быть использованы те же варианты схем управления, что и для конденсационных энергоблоков. Однако, учитывая малый период работы блока в этом режиме, целесообразно ограничить число вариантов схем двумя, используемыми и при теплофикационном режиме работы блока.
7.2.2. На агрегатном уровне подсистема АР теплофикационного блока должна быть дополнена автоматическими регуляторами отборов турбины, редукционно-охладительных установок, резервирующих отборы турбины, и регуляторами теплофикационной установки.
7.3. Подсистема АР ТЭС с поперечными связями
Подсистема АР ТЭС с поперечными связями строится по агрегатному принципу (аналогично подсистема АР агрегатного уровня энергоблоков).
7.3.1 Подсистемы АР котлов, подсоединенных к одному паропроводу, должны иметь двухуровневую структуру, верхний уровень которой (главный регулятор) выполняет функцию группового регулятора нагрузки, поддерживающего заданное давление в общем паропроводе, воздействуя на индивидуальные регуляторы нагрузки котлов.
Нижний уровень образуют подсистемы АР отдельных котлов.
7.3.2. Регулирование нагрузки турбоагрегатов осуществляется регуляторами частоты вращения турбин по заданию оператора, передаваемого в гидравлическую систему регулирования турбины через МУТ.
При модернизации СКУ конденсационных турбоагрегатов мощностью 50 МВт и выше целесообразно оснащение их индивидуальными регуляторами активной мощности, а теплофикационных турбоагрегатов - регуляторами активной мощности и тепловой нагрузки, воздействующими на МУТ турбины.
На данном этапе это позволит улучшить процесс управления электрической и тепловой нагрузками турбоагрегатов, а в дальнейшем послужит базой для создания группового уровня управления турбоагрегатами с рациональным распределением нагрузок между ними.
7.3.3. Агрегатные подсистемы АР должны отвечать тем же требованиям, что и агрегатные подсистемы блочных установок.
8. ПОДСИСТЕМА ЛОГИЧЕСКОГО УПРАВЛЕНИЯ
8.1. Подсистема ЛУ предназначена для дискретного автоматизированного управления оборудованием и автоматическими устройствами энергоустановки по заранее заданным алгоритмам. Объем функций, выполняемых подсистемой ЛУ, может варьироваться в широких пределах и определяется типом энергоустановки, режимами ее работы в энергосистеме, техническими средствами, на которых реализована СКУ и т.п.
Наибольший уровень автоматизации технологических процессов обеспечивается системой функционально-группового управления (ФГУ), которая осуществляет координированное программно-логическое управление отдельными технологически связанными функциональными группами оборудования (ФГ), агрегатами и энергоустановкой в целом.
8.2. Система ФГУ строится пo иерархическому принципу и включает в себя:
верхний уровень - БКУ, общее для подсистем АР и ЛУ;
уровень управления отдельными ФГ;
уровень управления подгруппами;
уровень управления механизмами собственных нужд, запорными и регулирующими органами.
8.3. Блочное координирующее устройство, кроме функций, указанных в п. 7.1.2, выполняет:
формирование команд подсистемам управления ФГ на выполнение выбранной программы пуска или останова энергоустановки;
контроль технологических ограничений и формирование команд на задержку выполнения команд или перевод оборудования в безопасное состояние при их возникновении;
координацию управления отдельными ФГ.
8.4. Функциональная группа включает в себя один или несколько узлов технологического оборудования, связанных единством технологического процесса, для которых могут быть однозначно определены:
начальное состояние;
одна или несколько программ пуска (останова), по завершении которых устанавливается режим, при котором эта группа оборудования может устойчиво работать длительное время;
условия нормальной работы;
технологические ограничения и программа действий при их возникновении.
Для автоматизации управления такой ФГ необходимо наличие надежного автоматического контроля указанных состояний и электрифицированных органов управления, обеспечивающих выполнение соответствующих программ.
8.5. Алгоритмы управления отдельными ФГ, как правило, неоднозначны и включают в себя несколько программ действия, зависящих от исходного состояния оборудования как самой ФГ, так и энергоустановки в целом.
Сложные программы строятся по «шаговому» принципу таким образом, чтобы отказ в выполнении любой команды внутри «шага» не приводил к аварийной ситуации на энергоустановке и у оператора имелся бы резерв времени для принятия решения. На каждом «шаге» программы должны выполняться:
контроль состояния оборудования;
формирование команд на исполнительные устройства в соответствии с алгоритмом;
переключения в схемах АР;
информация о выполнении «шага» или возникших нарушениях.
8.6. Подгруппа включает в себя часть оборудования ФГ, алгоритм управления которым при всех режимах работы энергоустановки однозначен. К ним относятся схемы автоматического включения резерва (АВР) и всережимные («жесткие») блокировки. Управление подгруппами выполняется независимым от «пошагового» управления ФГ, в котором должен предусматриваться только контроль состояния АВР и «жестких» блокировок, имеющих устройства ручного ввода, и результатов их действия.
Автоматическое включение резерва механизмов собственных нужд и «жесткие» блокировки должны выполняться как постоянно действующие независимо от состояния ФГУ.
Применение АВР механизмов собственных нужд при наличии резервных и «жестких» блокировок как минимум в объеме, определенном заводами-изготовителями оборудования, является обязательным для всех энергоустановок.
8.7. Алгоритмы функционирования отдельных уровней ФГУ должны строиться таким образом, чтобы отключение любого вышестоящего уровня управления не приводило к неработоспособности нижестоящих уровней. А отключение одного или нескольких устройств управления одного уровня не должно влиять на работоспособность остальных устройств управления этого уровня. При этом функции отключенного уровня или устройства управления должен взять на себя оператор энергоустановки. Такое построение ФГУ позволяет варьировать в широких пределах объем автоматизированного программно-логического управления.
Полный объем ФГУ включает в себя все уровни управления и управление практически всеми ФГ энергоустановки. Возможно применение сокращенных вариантов ФГУ, например, без верхнего уровня (БКУ);
с неполным составом ФГ;
с сокращенным объемом функций управления БКУ и отдельных ФГ.
8.8. При модернизации СКУ энергоустановок ФГУ может применяться как в полном, так и в сокращенном объемах.
8.8.1. В полном объеме подсистему ФГУ целесообразно применять:
на энергоблоках мощностью 500 МВт и выше независимо от типа оборудования и условий работы в энергосистеме;
на конденсационных энергоблоках с газомазутными котлами, которые по условиям работы в энергосистеме периодически останавливаются на ночь и в нерабочие дни с последующим пуском из горячего и неостывшего состояний за ограниченное время;
на всех полупиковых энергоблоках.
а) вариант, обеспечивающий автоматизированное управление пуском блока с момента розжига котла, т.е. автоматизацию наиболее ответственных этапов пуска: розжига горелок, прогрева паропроводов, разворота и синхронизации турбогенератора, повышения параметров и нагружения блока до номинальных значений. При этом из объема ФГУ исключаются предпусковые операции, которые должен выполнить оперативный персонал блока;
б) вариант по п. 8.8.2, а с ограниченными функциями блочного координирующего устройства. В этом варианте выбор программы пуска и координацию работы отдельных ФГ осуществляет оператор, а БКУ выполняет функции программатора.
8.8.3. На всех энергоустановках обязательным является выполнение:
функционально-группового управления газовых горелок и мазутных форсунок на котлах, независимо от того являются ли газ и мазут основным, резервным или растопочным топливом;
функционально-группового управления собственно турбины, осуществляющего разворот, прогрев и взятие начальной нагрузки на турбинах, оснащенных ЭЧСР (электронная часть системы регулирования турбины).
8.8.4. На ТЭС с поперечными связями при частых остановах и пусках отдельных агрегатов целесообразно применение автономных логических автоматов пуска котлов и турбин.
9. ИНФОРМАЦИОННАЯ ПОДСИСТЕМА
9.1. По способу реализации различаются два основных вида ЦП энергоустановок:
информационная подсистема, реализованная на традиционных технических средствах;
информационная подсистема, реализованная на средствах вычислительной техники с частичным дублированием традиционными средствами, получившая название информационно-вычислительная система (ИВС).
9.2. Информационная подсистема на традиционных технических средствах (показывающие и регистрирующие приборы, сигнализация на табло, световые индикаторы, стационарная мнемосхема) имеет ограниченные функциональные возможности, низкую информативность и требует больших площадей в оперативном контуре поста управления для размещения технических средств.
С помощью ИП этого типа решаются задачи представления информации для оперативного управления энергоустановкой и регистрации ограниченного количества параметров технологического процесса, необходимых для анализа работы оборудования и подготовки отчетной документации.
Применение ИП на традиционных технических средствах при модернизации СКУ целесообразно на энергоустановках малой мощности с небольшим объемом контроля и сигнализации, а также в тех случаях, когда модернизация проводится с целью сохранения работоспособности существующей ИП путем замены выработавших свой ресурс технических средств.
9.3. Информационно-вычислительная система должна обеспечивать выполнение всех оперативных и неоперативных функций по подготовке, представлению, хранению и документированию информации в АСУ ТП энергоустановки. Информационно-вычислительная система реализуется на средствах вычислительной техники с частичным дублированием традиционными средствами контроля и сигнализации.
9.3.1. Оперативные функции ИВС включают в себя:
контроль за ходом технологического процесса, состоянием оборудования энергоустановки и подсистем СКУ;
аварийную и предупредительную сигнализацию;
накопление, представление и регистрацию ретроспективной информации о технологических параметрах и состоянии оборудования;
контроль действия защит после их срабатывания (КДЗ).
9.3.2. В состав неоперативных функций должны входить:
регистрация аварийных событий (РАС);
расчет технико-экономических показателей (ТЭП);
ведение отчетной документации (суточные и пусковые ведомости, протоколы выработки ресурса основных механизмов и др.);
составление протоколов периодических испытаний;
диагностика работы оборудования энергоустановки;
накопление статистических данных о работе основного оборудования.
9.3.3. В состав сервисных функций должны входить:
представление нормативно-справочной информации;
контроль за работой подсистем СКУ;
диагностика, накопление и документирование данных о работе технических средств СКУ.
9.4. Выполнение функций ИВС обеспечивается за счет применения следующих основных технических средств:
цветных графических дисплеев с функциональными клавиатурами для представления оперативной и неоперативной информации в виде мнемосхем, гистограмм, таблиц, графиков, форм отчетной документации и т.п.;
автоматических печатающих устройств (принтеры) и аппаратуры для получения твердых копий с экранов дисплеев;
вычислительных устройств, обеспечивающих работу дисплеев и принтеров, обработку и хранение входной информации, выдачу необходимой информации автоматически или по запросу оперативного персонала;
традиционных средств контроля и сигнализации, частично резервирующих оперативные информационные средства ИВС в случае их отказа, а при их работе - повышающих оперативность управления энергоустановкой. Количество и состав традиционных средств должны обеспечивать минимально необходимый контроль за работой энергоустановки: с постоянной нагрузкой и действующими подсистемами ТЗ и ЗБ, АР и ЛУ при полном отказе оперативных информационных дисплеев в течение времени, необходимого для восстановления их работы (не более 1 ч) или ее безопасный останов.
9.5. При модернизации СКУ на энергоустановках средней и большой мощности (50 МВт и выше) могут применяться два основных типа ИВС:
автономные, не имеющие связей по цифровым информационным каналам с другими подсистемами;
интегрированные, являющиеся частью распределенной микропроцессорной АСУ ТП, подсистемы которой связаны между собой цифровыми информационными магистралями.
Автономную ИВС следует применять при модернизации информационной подсистемы по варианту п. 1.8, а также при модернизации всей СКУ (см. п. 1.7), если она выполняется в виде автономно функционирующих подсистем контроля и управления.
Интегрированная ИВС должна выполняться в случае применения распределенной микропроцессорной АСУ ТП при модернизации по варианту п. 1.7.
10. ОРГАНИЗАЦИЯ ПОСТОВ УПРАВЛЕНИЯ ЭНЕРГОУСТАНОВКАМИ
На энергоустановках должны предусматриваться:
главный пост управления;
местные щиты управления;
управление по месту.
10.1. Главный пост управления (оперативный контур - ОК БЩУ на энергоблоке, ОК ГрЩУ на электростанции с поперечными связями), рассчитанный на одно или несколько рабочих мест операторов-технологов, должен быть оборудован средствами контроля и управления, необходимыми для ведения технологического процесса при всех режимах работы энергоустановки. Он должен располагаться в изолированном от оборудования помещении и удовлетворять современным техническим, эргономическим, климатическим и другим требованиям.
10.2. Местные щиты управления предназначены для контроля и управления отдельными агрегатами или группами оборудования. Они располагаются в тех же помещениях, где установлено оборудование или вблизи оборудования. При модернизации СКУ следует стремиться к максимальному сокращению количества МЩУ с переносом их функций на главный пост управления. Местные щиты управления целесообразно устанавливать только во вспомогательных цехах, оборудование которых расположено за пределами главного корпуса.
10.3. Управление по месту должно выполняться для:
наиболее ответственных запорных, отсечных и предохранительных органов;
аварийного останова механизмов собственных нужд;
неоперативной (ремонтной) запорной арматуры, снабженной электроприводом.
В первых двух случаях местное управление дублирует основное управление с главного поста и является по отношению к нему резервным. В последнем случае местное управление является единственным способом дистанционного управления.
10.4. Компоновка оперативного контура главного поста управления зависит от типа и состава технологического оборудования и выбранной для его управления СКУ. Он состоит из пульта с приставкой и панелей, на которых размещены: органы дистанционного управления исполнительными механизмами, средствами автоматического регулирования и логического управления; средства представления оперативной информации и сигнализации. Пульт размещается на расстоянии до 1 м от панелей, что обеспечивает лучшую обзорность размещенных на них средств информации и доступ обслуживающего персонала.
Каждый энергоблок ТЭС должен иметь свой оперативный щит управления (ОК БЩУ). Компоновка средств контроля и управления в ОК БЩУ должна выполняться по агрегатному принципу, однако таким образом, чтобы при нормальной работе оборудования и СКУ энергоблоком мог управлять один оператор, а во время пуска и в аварийных ситуациях - два оператора. Для выполнения этого требования основные средства контроля и управления котлом и турбоагрегатом должны размещаться в центральных частях пульта и панелей, а на их «крыльях» - менее ответственные средства, обращения к которым в процессе управления достаточно редки. При этом должно соблюдаться правило: взаимное расположение органов управления и контроля должно быть таким, чтобы в процессе дистанционного управления оператор мог непосредственно наблюдать за результатами своих действий.
10.5. Применение средств вычислительной техники, обеспечивающих комплексное представление большого объема информации на экранах дисплеев и дистанционное управление с функциональных клавиатур небольшого размера или непосредственно с экранов дисплеев, дает возможность выполнить компоновку ОК БЩУ оптимальным образом. В центре пульта размещаются дисплейные модули, обеспечивающие контроль и управление практически всем оборудованием энергоблока. На «крыльях» пульта и вертикальных приставках к ним располагаются традиционные органы управления и малогабаритные приборы, резервирующие средства вычислительной техники.
В центральной части панелей ОК БЩУ помещается укрупненная мнемосхема энергоблока, позволяющая оператору оценить общую ситуацию без обращения к дисплеям. По бокам мнемосхемы устанавливаются крупногабаритные регистрирующие приборы, резервирующие ИВС.
Управление и контроль за электротехническим оборудованием локализуется в отдельной (крайней) зоне ОК БЩУ.
При этом должны соблюдаться поагрегатный принцип и технологическая последовательность компоновки средств контроля и управления: «котел-турбина-генератор».
10.6. Групповые щиты управления (ГрЩУ) на ТЭС с поперечными связями создаются для управления несколькими однотипными агрегатами (котлами, турбоагрегатами). Каждому агрегату в ОК ГрЩУ отводится отдельная зона, в которой сосредоточены его средства контроля и управления. Применение средств вычислительной техники, позволяющих сократить размеры пульта и количество панелей, дает возможность оптимизировать компоновку ОК ГрЩУ.
Одним из таких решений является размещение на пульте по агрегатному принципу дисплейных модулей с функциональными клавиатурами и минимальным количеством индивидуальных органов управления, доступных одному сидящему оператору, а на панелях - активных укрупненных мнемосхем со световыми индикаторами состояния оборудования, дублирующими вычислительную систему в ограниченном объеме индивидуальными приборами и органами управления. Такая компоновка ОК ГрЩУ позволяет одному оператору в нормальных условиях управлять группой агрегатов, а при пусках или нарушениях режима подключать к управлению с активной мнемосхемы второго оператора (старшего машиниста или начальника смены).
Приложение
ОБЪЕМ ЗАМЕНЫ АППАРАТУРЫ УПРАВЛЕНИЯ, КОНТРОЛЯ, АВТОМАТИКИ В ЗАВИСИМОСТИ ОТ ДЛИТЕЛЬНОСТИ ПЕРИОДА ЭКСПЛУАТАЦИИ ПРИ РЕКОНСТРУКЦИИ И ТЕХНИЧЕСКОМ ПЕРЕВООРУЖЕНИИ ЭЛЕКТРОСТАНЦИЙ
|
Наименование технических средств |
Объем замены аппаратуры (%) при длительности эксплуатации, лет, более |
|||
|
25 |
20 |
15 |
10 |
|
|
1. Аппаратура управления (переключатели, ключи, блоки управления АР и т.п.) |
100 |
100 |
30 |
10 - 15 |
|
2. Релейная аппаратура для управления блокировок, системы АР, сигнализации |
100 |
50 |
10 - 20 |
- |
|
3. Аппаратура сборок РТЗО |
100 |
50 |
10 - 20 |
- |
|
4. Первичные приборы и датчики: |
||||
|
4.1. Термопары |
100 |
100 |
100 |
40 - 60 |
|
4.2. Термометры сопротивления |
100 |
100 |
100 |
40 - 60 |
|
4.3. Датчики теплотехнического контроля |
100 |
100 |
100 |
20 - 30 |
|
4.4. Датчики электротехнического контроля |
100 |
100 |
100 |
20 - 30 |
|
4.5. Датчики химического контроля |
100 |
100 |
100 |
50 - 60 |
|
5. Приборы: |
||||
|
5.1. Амперметры, указатели положения АР |
40 - 60 |
20 |
- |
- |
|
5.2. Манометры прямого действия, ЭКМ |
100 |
100 |
50 |
10 - 20 |
|
5.3. Вторичные электронные приборы |
100 |
100 |
100 |
20 - 30 |
|
6. Технологическая сигнализация: |
||||
|
6.1. Табло ТСБ (ТСМ) |
40 - 60 |
20 |
- |
- |
|
6.2. Табло ТСС-66 |
100 |
100 |
70 |
- |
|
6.3. Аппаратура сигнализации положения |
40 - 60 |
20 |
- |
- |
|
7. Технологические защиты: |
||||
|
7.1. Источники аналого-дискретного преобразования и первичные приборы |
100 |
100 |
100 |
30 - 50 |
|
7.2. Релейная аппаратура |
100 |
70 |
50 |
- |
|
8. Кабельные изделия: |
||||
|
8.1. Кабельные перемычки между панелями и пультами щитов |
50 |
20 |
- |
- |
|
8.2. Контрольные кабели и компенсационный провод связи с датчиками и исполнительными механизмами |
100 |
60 |
20 - 30 |
- |
|
9. Аппаратура авторегулирования: |
||||
|
9.1. Автоматические регуляторы |
100 |
100 |
70 |
10 - 20 |
|
9.2. Исполнительные механизмы |
100 |
100 |
60 |
- |
|
9.3. Магнитные пускатели и усилители |
100 |
80 |
50 |
- |
|
9.4. Тиристорные усилители |
- |
- |
50 |
10 - 20 |
|
10. Информационно-вычислительная система |
100 |
100 |
100 |
60 |
|
11. Щитовые изделия - объем замены определяется по пп. 1 - 10 |
||||
|
12. Устройство управления УКТС |
Отсутствовали |
50 |
20 |
|
Список использованной литературы
СОДЕРЖАНИЕ