ГОСТ 30286-94
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
РОБОТЫ ПРОМЫШЛЕННЫЕ
ПРЕДСТАВЛЕНИЕ ХАРАКТЕРИСТИК
МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ
ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ
Минск
Предисловие
1 РАЗРАБОТАН Техническим комитетом № 69 «Системы промышленной автоматизации»
ВНЕСЕН Госстандартом России
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол № 6-94 от 21 октября 1994 г.)
За принятие проголосовали:
|
Наименование национального органа по стандартизации |
|
|
Азербайджанская Республика |
Азгосстандарт |
|
Республика Армения |
Армгосстандарт |
|
Республика Беларусь |
Белстандарт |
|
Республика Грузия |
Грузстандарт |
|
Республика Казахстан |
Госстандарт Республики Казахстан |
|
Кыргызская Республика |
Кыргызстандарт |
|
Республика Молдова |
Госдепартамент Молдовастандарт |
|
Российская Федерация |
Госстандарт России |
|
Республика Узбекистан |
Узгосстандарт |
|
Украина |
Госстандарт Украины |
3 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 24.05.95 № 265 межгосударственный стандарт ГОСТ 30286-94 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 января 1996 г.
4 ВВЕДЕН ВПЕРВЫЕ
ГОСТ 30286-94
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
|
ПРЕДСТАВЛЕНИЕ ХАРАКТЕРИСТИК Industrial robots. Presentation of characteristics |
Дата введения 1996-01-01
1. ОБЛАСТЬ ПРИМЕНЕНИЯ
Стандарт устанавливает требования к форме представления изготовителем характеристик и показателей промышленных роботов (далее - роботов).
Требования настоящего стандарта являются обязательными, за исключением требований приложения А.
2. НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 2.601-68 (СТ СЭВ 1798-79) ЕСКД. Эксплуатационные документы
ГОСТ 12.2.072-82 ССБТ. Роботы промышленные, роботизированные технологические комплексы и участки. Общие требования безопасности
ГОСТ 25686-85 Манипуляторы, автооператоры и промышленные роботы. Термины и определения
ГОСТ 26063-84 Роботы промышленные. Устройства захватные. Типы, номенклатура основных параметров, присоединительные размеры
ГОСТ 30097-93 (ИСО 9787-90) Роботы промышленные. Системы координат и направления движений
3. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Термины и определения - по ГОСТ 25686.
4. ЕДИНИЦЫ ИЗМЕРЕНИЯ
Если нет других указаний, то следует пользоваться следующими единицами измерений физических величин: длина в миллиметрах, углы в радианах или в градусах, время в секундах, масса в килограммах, сила в ньютонах, скорость в метрах в секунду, радианах в секунду или градусах в секунду.
5. ХАРАКТЕРИСТИКИ
5.1. Общие требования
Изготовитель должен представлять информацию о характеристиках робота как часть документации на него по ГОСТ 2.601.
Рекомендуемые формы представления характеристик робота и обозначения характеристик робота приведены в приложении А.
5.2. Область применения
Изготовитель должен указать основную область (области) применения робота, например погрузка-разгрузка, сборка, точечная или дуговая сварка, механообработка, окраска распылением, нанесение покрытий, склеивание или герметизация, контроль или проверка и т.п.
5.3. Источники энергии
Изготовитель должен указать:
- все внешние источники энергии, необходимые для нормального функционирования систем робота (приводов, устройства управления, вспомогательного оборудования и т.д.);
- тип энергии (электрический, гидравлический, пневматический или комбинированный);
- максимальную мощность (расход) для каждой системы, каждой управляемой оси и вспомогательных движений, при этом должны быть оговорены допускаемые пределы или отклонения от номинала.
Если используются несколько видов энергии, изготовитель должен дать соответствующие сведения по каждому из них.
5.4. Схема механической системы
Изготовитель должен указать тип схемы механической системы робота и число управляемых осей. На чертеже должны быть детально указаны все оси, по которым или относительно которых осуществляются перемещения. Этот чертеж может быть совмещен со схемой рабочего пространства робота (см. 5.5).
Ниже приведены примеры роботов, в наименовании которых указан тип схемы механической системы:
- робот, работающий в прямоугольной системе координат;
- робот, работающий в цилиндрической системе координат;
- робот, работающий в полярной или сферической системах координат;
- робот с шарнирной рукой;
- портальный робот;
- маятниковый робот;
- робот типа «хобот»;
- робот типа «Scara».
Если робот подвижный, следует указывать способ перемещения.
5.5. Рабочее пространство

|
Рабочее пространство, мм |
Пределы движений по вторичным осям |
|||
|
X1 |
Z1 |
В |
С |
|
|
1 |
925 |
1635 |
+75° -90° |
+170° -150° |
|
2 |
1610 |
1550 |
+75° -90° |
+180° |
|
3 |
1750 |
1140 |
+75° -105° |
+180° |
|
4 |
1310 |
345 |
+45° -120° |
+180° |
|
5 |
870 |
600 |
+45° -120° |
+150° -170° |
|
6 |
840 |
1000 |
+75° -120° |
+140° -150° |
|
7 |
1350 |
750 |
- |
- |
Рисунок 1 - Примеры рабочего пространства робота с пятью осями

|
Рабочее пространство, мм |
Пределы движения по вторичным осям |
||||
|
X1 |
Z1 |
А |
В |
С |
|
|
1 |
925 |
1635 |
±210° |
+75° -90° |
+170° -150° |
|
2 |
1610 |
1550 |
±210° |
+75 -90° |
+180° |
|
3 |
1750 |
1140 |
±210° |
+75° -90° |
+180° |
|
4 |
1310 |
345 |
±210° |
+45° -120° |
+180° |
|
5 |
870 |
600 |
±210° |
+45° -120° |
+150° -170° |
|
6 |
840 |
1000 |
±210° |
+75° -120° |
+140° -150° |
|
7 |
1350 |
750 |
- |
- |
- |
Рисунок 2 - Примеры рабочего пространства робота с шестью осями
На чертеже должна быть показана граница рабочего пространства не менее чем в двух проекциях.
Один вид должен представлять собой проекцию геометрического места точек, предельно достижимых рукой робота, на плоскость XY, другой - на плоскость XZ.
На чертеже должно быть показано исходное положение робота, центр рабочего пространства Cw (если его возможно указать) и приведена информация об ограничениях перемещений по осям. На рисунке 1 дан пример рабочего пространства робота с пятью осями, на рисунке 2 - с шестью осями. Крайние положения должны быть заданы в табличной форме, как показано на тех же рисунках.
5.6. Системы координат
Системы координат - по ГОСТ 30097. Отклонения от требований указанного стандарта должны быть оговорены изготовителем.
5.7. Габаритные размеры и масса
Изготовитель должен указать габаритные размеры и массу механической части робота и устройства управления.
5.8. Установочная поверхность основания
Изготовитель должен дать описание или чертеж установочной поверхности основания и рекомендации по монтажу для обеспечения безопасности работы и получения заданных характеристик робота.
5.9. Механический интерфейс
Изготовитель должен дать описание механического интерфейса, в том числе чертежи, перечень деталей и исчерпывающие рекомендации, необходимые для присоединения рабочего органа к руке робота.
Должны быть сделаны ссылки на соответствующий стандарт, например ГОСТ 26063, если он использован.
5.10. Управление
Изготовитель должен указать:
- тип устройства управления и всю необходимую информацию, например возможности устройства; специальное обеспечение, например схемы управления;
- число хранимых программ: номинальное и максимальное;
- основной тип управления (позиционный, контурный);
- управление движением (с сервоуправлением, без сервоуправления);
- метод интерполяции (в случае ее применения): линейная, круговая, параболическая и т.п.;
- пульт управления оператора;
- входные/выходные интерфейсы: тип и уровень сигналов (непрерывные или мультиплексированные);
- параметры сетевых интерфейсов: физические характеристики, формат данных.
5.11. Методы программирования
Изготовитель должен указать способ программирования:
- путем ручного ввода данных;
- обучением (с ручным перемещением рабочего органа, с ручным перемещением механического имитирующего устройства, с использованием пульта обучения);
- аналитический;
- целевой.
5.12. Окружающая среда
Изготовитель должен указать пределы параметров окружающей среды, при которых обеспечиваются номинальные характеристики или которым соответствует степень защиты робота от окружающей среды.
Изготовитель должен указать условия хранения и эксплуатации (если они различны), при которых не наступает повреждение робота.
В число важнейших параметров окружающей среды входят (но не ограничиваются ими):
- температура, °С (эксплуатации, хранения, транспортирования);
- относительная влажность, %;
- предельная высота над уровнем моря, м;
- электромагнитные помехи;
- загрязнение атмосферы;
- вибрации.
5.13. Нагрузки
К нагрузкам относятся:
- масса, кг;
- изгибающий момент, Н·м;
- крутящий момент, Н·м;
- сила, Н;
- момент инерции, кг/м2.
Эти показатели должны быть заданы в системе координат механического интерфейса.
Изготовитель должен указать номинальную грузоподъемность робота. Положение центра тяжести перемещаемой массы и максимальный момент от этой нагрузки следует указывать в виде рисунков и графиков (рисунки 3 и 4).
Изготовитель должен указать максимальную нагрузку и показать ее влияние на другие характеристики робота, например на скорость и ускорение. Если робот может переносить некоторые дополнительные массы, например на руке, то они должны быть также указаны.
Изготовитель должен указать максимальные усилия и крутящий момент. Если усилие и момент зависят от ориентации запястья, это должно быть указано по примеру рисунка 5.
5.14. Скорость

Рисунок 3 - Диаграмма нагрузки
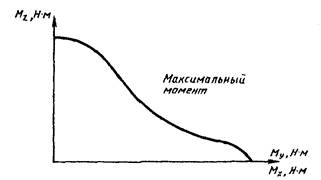
Рисунок 4 - График момента

|
Усилие |
Максимальный крутящий момент |
|
|
X Y |
Рисунок 5 - Значение усилия и крутящего момента
Если нет других указаний, изготовитель должен указать скорость при следующих условиях:
- на участке установившегося движения, где отсутствует ускорение разгона или торможения, когда скорость определяется как отношение линейного или углового перемещения к времени, затраченному на это перемещение;
- при приложенной номинальной нагрузке, наряду с другими характеристиками изготовитель должен указать:
максимальную индивидуальную скорость по каждой оси;
номинальную контурную скорость при заданной форме траектории и связанные с нею показатели.
5.15. Дискретность
Указывается по каждой оси в миллиметрах, радианах или градусах.
5.16. Показатели
Изготовитель должен дать информацию о важнейших гарантируемых показателях, которыми являются:
- точность и повторяемость позиционирования при подходе в одном направлении;
- точность и повторяемость позиционирования при подходе в нескольких направлениях;
- точность и повторяемость отработки заданного расстояния;
- время успокоения в заданной позиции;
- перебег;
- дрейф характеристик позиционирования;
- точность и повторяемость отработки траектории;
- погрешность отработки заданного угла;
- характеристики контурной скорости;
- минимальное время позиционирования;
- статическая податливость.
5.17. Безопасность работы
Требования безопасности - по ГОСТ 12.2.072.
ПРИЛОЖЕНИЕ А
(рекомендуемое)
РЕКОМЕНДУЕМЫЕ ФОРМЫ ПРЕДСТАВЛЕНИЯ ХАРАКТЕРИСТИК РОБОТА И ОБОЗНАЧЕНИЯ ХАРАКТЕРИСТИК РОБОТА
|
Дата выпуска ____________ |
|||||
|
………………………………… |
Наименование изготовителя ……………………………. |
||||
|
Страна ………………………………… |
Модель …………………………………………………… Тип ……………………………………………………….. |
||||
|
Основная(ые) область(и) применения Источник энергии: - внешний ……………………………………………………… - максимальная потребляемая мощность ……………………. - управляемые оси и вспомогательные движения …………… |
|||||
|
Схема механической системы, рабочее пространство и система координат
……………………………………………………………………………………………….. ……………………………………………………………………………………………….. |
|||||
|
Габаритные размеры и масса
|
|||||
|
Установочная поверхность основания
|
Механический интерфейс
|
||||
|
Управление Тип устройства управления ……………………………….. ……………………………….. Число хранимых программ: - номинальное ………………. - максимальное ……………… Основной тип управления …. Управление движениями ………………………………… Метод интерполяции ……….. |
Пульт управления оператора …………………….. Входные/выходные интерфейсы ………………… Параметры сетевых интерфейсов ……………….. |
||||
|
Метод программирования …………………………………………………………………… |
|||||
|
Работа |
Хранение/транспортирование |
||||||||
|
Температура Относительная влажность Предельная высота Электромагнитные помехи Загрязнение атмосферы Вибрация ………………………………… ………………………………… |
………………………. °С ………………………. % ………………………. м …………………………… …………………………… …………………………… …………………………… …………………………… |
………………………. °С ………………………. % ………………………. м …………………………… …………………………… …………………………… …………………………… …………………………… |
|||||||
|
Нагрузки Номинальная нагрузка |
|||||||||
|
Диаграмма нагрузки |
График момента |
||||||||
|
|||||||||
|
Максимальная нагрузка ……………………… |
Дополнительная масса ………………… |
||||||||
|
Примечание ……………. …………………………… …………………………… …………………………… …………………… + …………………… + |
||||||||
|
Индивидуальная скорость по оси |
Разрешающая способность |
|||||||||
|
1 |
||||||||||
|
2 |
||||||||||
|
3 |
||||||||||
|
4 |
||||||||||
|
5 |
||||||||||
|
6 |
||||||||||
|
Характеристики Характеристики позиций 100 % номинальной нагрузки, 100 % скорости |
Время позиционирования |
|||||||||
|
Расстояние |
Время |
|||||||||
|
AP - … vAP - … время успокоения - АPа - … vAPa - …перебег - АРb - …vAPb - … для амплитуды колебаний - |
||||||||||
|
АРс - … vAPc - … RP - … AD - … RPa - … RD - … RPb - … RPc - … |
График дрейфа |
Статическая податливость … мм/Н вдоль X … мм/Н вдоль Y … мм/Н вдоль Z |
||||||||
|
Характеристики траектории Форма траектории ………………………………………… 100% номинальной нагрузки ……………………………………………………………… Номинальная контурная скорость |
Характеристики контурной скорости 100 % номинальной нагрузки |
|||||||||
|
AV |
RV |
FV |
||||||||
|
10 % |
50 % |
100 % |
Номинальная |
10 % 50 % |
||||||
|
Контурная скорость |
100 % |
|||||||||
|
AT - ATa - ATb - ATc - RT - RTa - RTb - RTc - CR - CO - SPL - |
AT - ATa - ATb - ATc - RT - RTa - RTb - RTc - CR - CO - SPL - |
AT - ATa - ATb - ATc - RT - RTa - RTb - RTc - CR - CO - SPL - |
100 % номинальной контурной скорости |
|||||||
|
Безопасность ……………………………………………………………………………….. |
||||||||||
Обозначения характеристик робота
АР - точность позиционирования
RP - повторяемость позиционирования
vAP - точность позиционирования при нескольких направлениях подхода
AD - точность отработки расстояния
RD - повторяемость отработки расстояния
AT - точность отработки траектории
RT - повторяемость отработки траектории
CR - ошибка отработки угла
СО - перебег при отработке угла
SPL - длина участка успокоения при отработке прямого угла
AV - точность контурной скорости
RV - повторяемость контурной скорости
FV - отклонение контурной скорости
Индексы a, b, с относятся к характеристикам ориентации вокруг осей X, Y и Z.
СОДЕРЖАНИЕ
|
5.4. Схема механической системы.. 2 5.7. Габаритные размеры и масса. 5 5.8. Установочная поверхность основания. 5 5.9. Механический интерфейс. 5 |
Ключевые слова: промышленные роботы, представление характеристик, показатели