ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ
ЦЕНТРАЛЬНЫЙ
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ
И ПРОЕКТНО-ЭКСПЕРИМЕНТАЛЬНЫЙ ИНСТИТУТ
КОМПЛЕКСНЫХ ПРОБЛЕМ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ
И СООРУЖЕНИЙ им. В. А. КУЧЕРЕНКО
ГОССТРОЯ СССР
РЕКОМЕНДАЦИИ ПО ОПРЕДЕЛЕНИЮ
РАСЧЕТНОЙ СЕЙСМИЧЕСКОЙ
НАГРУЗКИ ДЛЯ СООРУЖЕНИЙ
С УЧЕТОМ ПРОСТРАНСТВЕННОГО
ХАРАКТЕРА ВОЗДЕЙСТВИЯ
И РАБОТЫ КОНСТРУКЦИЙ
Утверждены
Директором ЦНИИСК им. В. А. Кучеренко
11 марта 1988 г.
МОСКВА - 1989
Рекомендованы к изданию решением секции «Сейсмостойкость сооружений» Научно-технического совета ЦНИИСК им. В. А. Кучеренко Госстроя СССР.
Содержат алгоритм определения расчетной сейсмической нагрузки для сооружений с учетом пространственного характера внешнего воздействия и работы конструкции.
В Приложениях приведено обоснование основных положений и методов расчета, приведены примеры расчета сейсмической нагрузки на колонны силосного корпуса и на колонны и диафрагмы жесткости трехэтажного каркасного здания.
Предназначены для инженерно-технических работников проектных и научно-исследовательских институтов.
ПРЕДИСЛОВИЕ
Рекомендации составлены в развитие СНиП II-7-81 с целью практического использования методов расчета сооружений с учетом пространственного характера работы конструкций и сейсмического воздействия.
Рекомендации предназначены для использования в проектной практике при расчете сооружений сложных конструктивных форм, несущих большие нагрузки и требующих учета пространственного характера работы конструкций.
В Рекомендациях приведен алгоритм расчета по определению сейсмической нагрузки на сооружения с учетом пространственного характера воздействия и работы самой конструкции. Даны рекомендации по выбору расчетных динамических моделей сооружений и определению их параметров. Приводится алгоритм расчета режима свободных колебаний сооружений. Даны рекомендации по определению расчетных моделей сейсмического воздействия и выбору их численных параметров.
Приводится алгоритм расчета вынужденных колебаний сооружения по выбранным моделям внешнего воздействия.
В приложениях приведены примеры расчета сейсмической нагрузки на колонны силосного корпуса и расчета сейсмической нагрузки на колонны и диафрагмы жесткости трехэтажного каркасного здания. Изложены основные положения расчета по определению сейсмической нагрузки с учетом пространственного характера работы сооружения и сейсмического воздействия.
По методике настоящих Рекомендаций разработана автоматизированная система расчета сооружений на сейсмические воздействия «Полифем-S87».
Рекомендации разработаны в Отделе сейсмостойкости сооружений ЦНИИСК им. В. А. Кучеренко (основной текст - канд. техн. наук Ю. П. Назаров при научном руководстве д-ра техн. наук проф. Н. А. Николаенко, приложения 1, 2 - кандидаты техн. наук А. Т. Штоль и Г. В. Мамаева; приложение 3 - инж. А. Ш. Ревишвили).
ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Настоящие Рекомендации составлены в развитие СНиП II-7-81 [17] с целью практического использования методов расчета сооружений с учетом пространственного характера работы конструкций и сейсмического воздействия.
Анализ последствий землетрясений (повреждения и разрушения сооружений) показывает, что движения (колебания) отдельных конструкций происходят одновременно по нескольким направлениям, т.е. эти движения являются пространственными. Перекрытия зданий перемещаются в двух направлениях и вращаются относительно вертикальной оси, что приводит к более интенсивным повреждениям периферийных несущих конструкций, т.е. сооружение работает как единая пространственная динамическая система.
Анализ регистрации движений грунта при землетрясениях показывает, что они являются сложными многомерными (пространственными) процессами. Сложность пространственного характера сейсмического воздействия состоит в том, что оно представляет собой поле движений грунта, определенное сейсмическими волнами с конечной скоростью их распространения. Сейсмические волны не являются монохроматическими, а представляют спектр одноименных волн различной длины, доминирующих в различные интервалы времени землетрясения. В начальные моменты времени приходят, имеющие большую скорость распространения, продольные Р-волны, затем - поперечные S-волны с меньшей скоростью распространения, но с большей интенсивностью воздействия. После S-фазы генерируются поверхностные L-волны (Рэлея-Лэмба и Лява), которые имеют еще меньшую скорость распространения. Наиболее сильные повреждения и разрушения сооружений наблюдаются при более интенсивных фазах движения грунта, определяемых спектрами S- и L-волн. Такое поле движений приводит к дилатации и ротации массива грунта в основании сооружений. Дилатация (изменение объема за счет его расширения-сжатия) массива грунта в основании сооружения определяется всеми видами волн P, S и L и приводит только к поступательным движениям основания сооружения. Эти движения происходят в трех направлениях. Ротация (изменение формы объема за счет его искажения) определяется только вихревыми составляющими поля S- и L-волн и приводит к вращению массива грунтового основания сооружения. Эти вращения происходят относительно трех осей.
1.2. Рекомендации предназначены для использования в проектной практике при расчете сооружений сложных конструктивных форм, несущих большие нагрузки и требующих обязательного учета пространственного характера работы конструкций. Объем таких сооружений в проектной практике постоянно возрастает, поскольку применение новых конструкционных материалов, новых конструкций, обладающих большей несущей способностью, приводит к появлению конструктивных решений сооружений, для которых учет пространственного характера воздействия и работы конструкций является обязательным.
1.3. В Рекомендациях рассматривается упругая стадия работы конструкций при колебаниях, соответствующих малым перемещениям и углам вращения масс сооружения.
1.4. Применение метода рекомендаций связано с обработкой громоздких массивов чисел. Использование рекомендуемых методов требует привлечения ЭВМ. Рекомендации составлены таким образом, что применение ЭВМ в проектной практике возможно в двух формах:
а) применение ЭВМ для выполнения отдельных этапов расчета:
- статический расчет сооружения с целью определения единичных внутренних усилий, формирования матрицы жесткости или податливости системы в целом;
- вычисления собственных значений матриц жесткости или податливости сооружения при определении частот и форм колебаний;
- определение параметров сейсмического воздействия;
- расчет режимов вынужденных колебаний и определение фактических величин внутренних усилий в конструкциях сооружения и т.д.;
б) объединение отдельных этапов работ в единый комплекс расчетов и разработка автоматизированной системы расчета сооружений с учетом пространственного характера работы конструкций и сейсмического воздействия.
2. АЛГОРИТМ РАСЧЕТА ПО ОПРЕДЕЛЕНИЮ СЕЙСМИЧЕСКОЙ НАГРУЗКИ НА СООРУЖЕНИЯ С УЧЕТОМ ПРОСТРАНСТВЕННОГО ХАРАКТЕРА ВОЗДЕЙСТВИЯ И РАБОТЫ КОНСТРУКЦИЙ
2.1. В Рекомендациях
приводится алгоритм определения сейсмической нагрузки на сооружения в наиболее
простом варианте, т.е. без учета всех корреляционных связей при компонентной
форме представления векторов сейсмического воздействия
![]() и
и ![]() *). Этот алгоритм состоит из следующих разделов:
*). Этот алгоритм состоит из следующих разделов:
- выбор и определение параметров расчетной динамической модели сооружения;
- формирование матриц жесткости или податливости и определение единичны усилий в элементах конструкций;
- расчет режима свободных колебаний;
- определение расчетных параметров
векторов сейсмического воздействия ![]() и
и ![]() ;
;
- расчет режима вынужденных колебаний;
- определение расчетных усилий в поперечных сечениях несущих конструкций сооружений.
*) Структура алгоритма расчета сооружений как единых пространственных систем на сейсмические воздействия с учетом пространственного характера возмущения зависит от ряда факторов:
способа представления информации о векторах сейсмического воздействия;
учета корреляции между отдельными формами колебаний;
учета корреляции между векторами сейсмического воздействия и их компонентами.
Расчет колебаний сооружений в соответствии с принятым алгоритмом выполняется на ЭВМ. На каждом отдельном этапе расчет сводится к заполнению и дальнейшей обработке соответствующих таблиц, перечень которых приводится ниже.
Расчет сводится к определению сейсмической нагрузки для выборочных элементов конструкций или для определения внутренних усилий в выборочных поперечных сечениях. Набор сечений, подлежащих проверке, устанавливается проектировщиком в зависимости от конструктивной схемы сооружения. Рекомендуется проверять наиболее напряженные периферийные конструктивные элементы, а для сравнения целесообразно выполнять проверку менее напряженных центральных элементов.
Выбор расчетной динамической модели сооружения и определение ее параметров
- конструкции сооружения (перекрытия, отдельные конструктивные части и т.д.), жесткость которых на порядок больше жесткости других конструкций, считаются абсолютно твердыми;
- другие конструкции сооружения (элементы каркаса, ядра и диафрагмы жесткости, диафрагмы лестничных клеток и т.п.) считаются упругими связями с линейными диаграммами деформирования материала;
- в динамических моделях массы сооружения распределяются по абсолютно твердым телам, а упругие конструкции считаются невесомыми и их масса относится к соответствующим твердым элементам, т.е. динамическая модель сооружения представляется в виде отдельных (дискретных) абсолютно твердых тел, соединенных несущими невесомыми упругими элементами;
- фундамент сооружения в расчетной динамической модели принимается жестким и моделируется твердым телом.
2.3. Дискретно расположенные в динамической модели массы могут быть представлены:
- материальной точкой, которая может иметь максимум три степени свободы и характеризуется величиной массы mk (k = 1, ..., n);
- твердым диском, имеющим три степени свободы и учитывающим геометрию распределения масс и упругих связей в плоскости диска. Диск движется в своей плоскости и характеризуется величиной массы mk и центральным осевым моментом инерции θk относительно оси, перпендикулярной к плоскости диска;
- массой в виде твердого тела, имеющего шесть степеней свободы и учитывающего геометрические параметры распределения масс и упругих связей в пространстве. Инерционные параметры твердого материального тела характеризуются величиной массы mk и тензором инерции масс относительно каких-либо осей [θk] (k = I, II, ..., n); в расчетах в качестве таких осей следует принимать главные и центральные оси инерции тела, для которых [θk] имеет вид диагональной матрицы с отличными от нуля только осевыми моментами инерции масс θik (i = 1, 2, 3).
Величины масс mk определяются в соответствии с требованиями учета нагрузок, изложенными в п. 2.1 СНиП II-7-81; моменты инерции масс θik вычисляются по справочным данным.
2.4. Материал несущих конструкций сооружения (деформируемые связи) принимается упругим с линейной диаграммой деформирования. Модели этих конструкций (колонны, панели, диафрагмы и т.п.) определяются:
- видом представления масс (точка, диск, тело) в расчетной динамической, модели сооружения;
- моделями упругих связей в статической расчетной модели при формировании матриц жесткости (или податливости).
2.5. При геометрическом описании расчетных динамических моделей сооружения вводятся системы отчета и устанавливается связь между ними:
- вводится инерциальная система осей ОХ1X2Х3 без привязки начала отсчета. В качестве этой системы осей может быть принята ориентация по странам света или какая-либо другая местная система трех ортогональных направлений;
- вводится система отсчета Ox01x02x03, связанная с подвижным основанием (фундаментом), движение которого определяется моделью сейсмического воздействия; оси Ox01x02x03 рекомендуется совмещать с основными осями здания;
- взаимосвязь между введенными системами осей определяется матрицей [φ0], имеющей следующий вид:
 , (1)
, (1)
где φ0ij - скалярные произведения единичных векторов jx0i и jxi (орт систем осей Ox01x02x03 и ОХ1Х2Х3); точкой отмечен знак скалярного произведения, поэтому φ0ij являются тригонометрическими функциями углов между осями ОХ1Х2Х3 и Ox01x02x03; если системы отсчета ОХ1Х2Х3 и Ox01x02x03 одинаково ориентированы в пространстве (оси параллельны), то оператор (1) сводится к единичной матрице:
 ;
;
- однозначно и произвольно устанавливается нумерация инерционных элементов (материальных точек, дисков, тел) расчетной динамической модели сооружения I, II, III, ..., k, ..., n;
- с каждым из инерционных элементов неизменно связываются системы осей kxk1xk2xk3. Для дисков и твердых тел эти оси должны быть главными и центральными осями инерции масс;
- определяется взаимосвязь между введенными системами осей kxk1xk2xk3 и Ox01x02x03. Эта взаимосвязь устанавливается с помощью операторов [φk], имеющих вид:
 , (2)
, (2)
где φkij - скалярные произведения орт jx0i и jxkj системы осей Ox01x02x03 и kxk1xk2xk3, поэтому φkij вычисляются аналогично (1); в частности, если оси kxk1xk2xk3 и Ox01x02x03 ориентированы в пространстве одинаково, то [φk] = Е - единичная матрица;
- векторами ![]() определяются положения начала
отсчета систем kxk1xk2xk3 относительно осей Ox01x02x03, где x0ik - координаты центра масс тела в системе отсчета Ox01x02x03 (i =
1, 2, 3).
определяются положения начала
отсчета систем kxk1xk2xk3 относительно осей Ox01x02x03, где x0ik - координаты центра масс тела в системе отсчета Ox01x02x03 (i =
1, 2, 3).
Описание упругих свойств расчетной динамической модели сооружения
2.6. Упругие свойства динамической модели сооружения определяются матрицей жесткости [r] или податливости [δ], которые рассчитываются по любым известным методам строительной механики.
2.7. Если расчет выполняется по методу сил (определение [δ]), то в центрах масс по направлению осей системы отсчета (или относительно их) последовательно прикладываются единичные силы Pxik = 1 (или моменты Мxik = 1). От последовательного действия каждой единичной силы или момента выполняется статический расчет упругой системы. При этом для поперечных сечений упругих элементов определяются внутренние усилия, которые сводятся в табл. 1. Определяются также перемещения начал всех систем отсчета по направлению принятых осей и углы поворота данных систем отсчета относительно этих осей. В соответствии с принятой нумерацией масс из этих перемещений и углов поворота формируется матрица податливости системы [δ]. Результаты сводятся в табл. 2.
Таблица 1
Таблица 2
Таблица 3
Таблица 4
2.8. Если расчет упругой системы выполняется по методу перемещений, то на начало выбранных систем отсчета по направлению принятых осей (или относительно их) накладываются связи, которым последовательно сообщаются единичные перемещения Δxik = 1 (или углы поворота Δφik = 1). Последовательно от каждого из этих перемещений или углов поворота выполняется статический расчет принятой упругой системы. При этом для поперечных сечений упругих элементов определяются внутренние усилия, которые сводятся в табл. 3. Определяются также реакции во всех наложенных связях. Из этих реакций, в соответствии с принятой нумерацией масс, формируется полная матрица жесткости системы [r]. Результаты формирования матрицы [r] сводятся в табл. 4.
Расчет режима свободных колебаний
2.9. Выполняется вспомогательный анализ полных матриц [r] [δ-1]. Для выявления особенностей составляющих
![]() или
или
![]() , (3)
, (3)
где
![]() . (4)
. (4)
Таблица 5
Анализ (3) и (4) является необходимым, но недостаточным для определения частот и форм колебаний системы.
2.10. Выполняется анализ полных матриц [А] = [M-1][r] или [B] = [А-1] = [δ][M] для выделения обособленных составляющих
![]() или
или
![]() (5)
(5)
где ![]() (6)
(6)
Здесь [Mi] - полная матрица инерционных параметров системы, структура которой показана в табл. 5, а [Mi] - ее составляющие, соответствующие обособленным составляющим [ri] или [δi].
2.11. Отдельно для каждой из обособленных составляющих [Аi] или [Bi] (если они имеются) решается задача на собственные значения (собственные числа и векторы) по частотным уравнениям.
Для каждой системы эти уравнения в прямой или обратной форме имеют соответственно вид:
![]() (8)
(8)
где
 -
-
блочный вектор коэффициентов j-ой формы колебаний.
Если обособленные составляющие [Ai] или [Bi] отсутствуют, то все колебания в пространстве линейно взаимосвязаны и задача решается по полной матрице [А] или [B].
При решении прямой задачи (7) по [A] определяются собственные числа в виде Ω2j (Ωj - частота j-ой формы колебаний), а при решении обратной задачи (8) по [B] - собственные значения - 1/Ω2j.
Каждая из обособленных составляющих [Ai] или [Bi] описывает свою независимую группу колебаний.
Результаты решения задачи по определению форм и частот сводятся в соответствующие таблицы (табл. 6). Такие таблицы составляются для каждой обособленной матрицы [Аi] или [Bi].
2.12. Коэффициенты форм колебаний системы нормируются по отношению к одному какому-либо коэффициенту, принимая его значение за единицу. В качестве такого нормирующего множителя удобно принимать значение коэффициента перемещения I массы в направлении 1-ой оси - Z(j)x11 = 1.
2.13. Критерием точности вычислений коэффициентов форм колебаний является удовлетворение их условиям ортогональности, имеющим вид
![]() (i ≠ j). (9)
(i ≠ j). (9)
При проверке условий ортогональности строится матрица [С], компоненты которой Cij определяются по (9) и при i = j, Cii = Mi (Мi - приведенная к i-ой форме колебаний масса сооружений). Результаты проверки ортогональности форм колебаний сводятся в табл. 7.
|
№ формы параметры формы |
1 |
2 |
3 |
.… |
j |
.… |
6n |
||
|
1-ое тело |
Ωj |
.… |
.… |
||||||
|
Z(j)x11 |
1 |
1 |
1 |
.… |
1 |
.… |
1 |
1 |
|
|
Z(j)x21 |
.… |
.… |
|||||||
|
Z(j)x31 |
.… |
.… |
|||||||
|
Z(j)α11 |
.… |
.… |
|||||||
|
Z(j)α21 |
.… |
.… |
|||||||
|
Z(j)α31 |
.… |
.… |
|||||||
|
. . . . |
. . . . |
. . . . |
. . . . |
.… .… .… .… |
. . . . |
.… .… .… .… |
. . . . |
. . . . |
|
|
k-ое тело |
Ωj |
.… |
.… |
||||||
|
Z(j)x1k |
.… |
.… |
|||||||
|
Z(j)x2k |
.… |
.… |
|||||||
|
Z(j)x3k |
.… |
.… |
|||||||
|
Z(j)α1k |
.… |
.… |
|||||||
|
Z(j)α2k |
.… |
.… |
|||||||
|
Z(j)α3k |
.… |
.… |
|||||||
|
. . . . |
. . . . |
. . . . |
. . . . |
.… .… .… .… |
. . . . |
.… .… .… .… |
. . . . |
. . . . |
|
|
n-ое тело |
Ωj |
.… |
.… |
||||||
|
Z(j)x1n |
.… |
.… |
|||||||
|
Z(j)x2n |
.… |
.… |
|||||||
|
Z(j)x3n |
.… |
.… |
|||||||
|
Z(j)α1n |
.… |
.… |
|||||||
|
Z(j)α2n |
.… |
.… |
|||||||
|
Z(j)α3n |
.… |
.… |
Таблица 7
|
1 |
2 |
3 |
... |
j |
... |
6n |
||
|
1 |
M1 |
0 |
0 |
... |
0 |
... |
0 |
0 |
|
2 |
0 |
M2 |
0 |
... |
0 |
... |
0 |
0 |
|
3 |
0 |
0 |
M3 |
... |
0 |
... |
0 |
0 |
|
. . . |
. . . |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
|
j |
0 |
0 |
0 |
... |
Mj |
... |
0 |
0 |
|
. |
. |
. |
. |
... |
. |
... |
. |
. |
|
. . . |
. . . |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
|
. |
0 |
0 |
0 |
... |
0 |
... |
M |
0 |
|
6n |
0 |
0 |
0 |
... |
0 |
... |
0 |
M6n |
Проверка условий ортогональности выполняется для каждой самостоятельной группы колебаний, определяемой соответствующими обособленными составляющими [Ai] или [Вi].
Весь алгоритм расчета режима свободных колебаний целесообразно выполнять по структуре, программы вычислений, показанной на рис. 1.

Рис. 1. Структура программы расчета режима собственных колебаний динамической системы
Расчетные параметры сейсмического воздействия
2.14. В соответствии с расчетной балльностью площадки строительства по СНиП II-7-81, определяется независимая от пространственной ориентации (инвариантная) расчетная интенсивность ускорений поступательного движения грунта в основании сооружения.
Расчетная инвариантная интенсивность ускорений поступательного движения грунта I является функцией от меньшего размера сооружения в плане В и вычисляется по формуле
I(В) = gАχ1(В) (м/с2), (10)
где g ≈ 10 м/с2 - ускорение силы тяжести; А - коэффициент, принимаемый равным 0,1; 0,2; 0,4 для расчетной сейсмичности 7, 8 и 9 баллов по СНиП II-7-81.
Значение нормированной аппроксимирующей функции χ1(В) определяется по ее графикам рис. 2 или вычисляется по формуле
χ1(В) = eα(B - 25), (11)
где В(м) - меньший размер сооружения в плане; α - аппроксимирующий коэффициент, значение которого равно -8 · 10-4; -4,8 · 10-3 и -1,2 · 10-2 (1/м) для I, II и III категории грунтов по СНиП II-7-81.

Рис. 2. Графики нормированных функций χ1(В) = eα(B - 25) при α = -8 · 10-4; -4,8 · 10-3 и -1,2 · 10-2 (1/м) для I, II и III категорий грунтов, соответственно
2.15. В зависимости от категории грунтов по СНиП II-7-81 определяется независимая от пространственной ориентации (инвариантная) интенсивность угловых ускорений вращательных движений грунта в основании сооружений (ускорения ротации поля сейсмических движений). Этот инвариант интенсивности определяется относительной (по отношению к инварианту ускорения поступательного движения) величиной W.
Расчетное значение относительного инварианта интенсивности углового ускорения сейсмических движений грунта является функцией от меньшего размера сооружения в плане В и вычисляется по формуле
![]() (м-1), (12)
(м-1), (12)
где ![]() = 2 · 10-2; 6 · 10-2 и 9 · 10-2 (м-1) для грунтов I, II и III категорий по СНиП
II-7-81.
= 2 · 10-2; 6 · 10-2 и 9 · 10-2 (м-1) для грунтов I, II и III категорий по СНиП
II-7-81.
Значение нормированной аппроксимирующей функции χ2(В) определяется по графикам рис. 3 или вычисляется по формуле
χ2(В) = eb(B - 25), (13)
где В(м) - меньший размер сооружения в плане; b - аппроксимирующий коэффициент, значение которого равно -7,2 · 10-3; -1 · 10-2 и -1,6 · 10-2 (1/м) для I, II и III категорий грунтов по СНиП II-7-81.

Рис. 3. Графики нормированных функций χ2(В) = eb(B - 25) при b = -7,2 · 10-3; -1 · 10-2 и -1,6 · 10-2 (1/м) для I, II и III категорий грунтов, соответственно
2.16. Спектральный
состав компонент векторов сейсмического воздействия (ускорения
поступательного
движения ![]() и
углового ускорения
и
углового ускорения ![]() ) определяется соответствующими
коэффициентами динамичности, в зависимости от
категории грунтов по СНиП
II-7-81 - kгр, коэффициентов потерь энергии при колебаниях
рассматриваемой системы γ = δ/π (δ -
логарифмический декремент колебаний), периодов собственных колебаний - Т = 2π/Ω (Ω -
частота собственных колебаний, определяемая в
соответствии с п.п. 8-12 Приложения 1).
) определяется соответствующими
коэффициентами динамичности, в зависимости от
категории грунтов по СНиП
II-7-81 - kгр, коэффициентов потерь энергии при колебаниях
рассматриваемой системы γ = δ/π (δ -
логарифмический декремент колебаний), периодов собственных колебаний - Т = 2π/Ω (Ω -
частота собственных колебаний, определяемая в
соответствии с п.п. 8-12 Приложения 1).
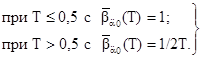
Для вектора ускорения поступательного движения грунта значения коэффициента динамичности определяются по СНиП II-7-81 и вычисляются по формуле
![]() , (14)
, (14)
где kгр - коэффициент, учитывающий категорию грунтов по СНиП II-7-81, значения которого принимаются по данным табл. 8.
Таблица 8
|
I |
II |
III |
|
|
kгр |
1 |
0,9 |
0,7 |
Таблица 9
|
0,1 |
γ < 0,1 сооружения со слабой диссипацией с учетом kφ = 1,5 по СНиП II-7-81 |
|
|
αγ |
3 |
3 · 1,5 = 4,5 |

Рис. 4. Графики нормированных коэффициентов
динамичности вектора ускорения поступательного
движения сейсмического воздействия ![]() для грунтов I, II и III категорий
для грунтов I, II и III категорий
Потери энергии при колебаниях системы учитываются коэффициентом αγ, значения которого определены для (14) в соответствии со СНиП II-7-81 и приведены в табл. 9.
Значения нормированных по соответствующим максимумам коэффициентам динамичности ![]() определяются
в зависимости от категории грунтов по СНиП II-7-81 по графикам рис. 4 или вычисляются по формулам:
определяются
в зависимости от категории грунтов по СНиП II-7-81 по графикам рис. 4 или вычисляются по формулам:
для I категории грунтов
 (15)
(15)
для II категории грунтов
 (16)
(16)
для III категории грунтов

Для вектора углового ускорения вращения сейсмического воздействия значения коэффициента динамичности вычисляются по формуле
![]() , (18)
, (18)
где kгр - коэффициент, учитывающий категорию грунтов по СНиП II-7-81, значения которого определяются по табл. 8.
|
0,1 |
0,05 |
0,02 |
0,01 |
0,005 |
|
|
bγ |
3 |
6 |
12 |
20 |
30 |
Примечание. Для других значений γ допускается коэффициент bγ определять по интерполяции.
Значения коэффициента bγ, учитывающего потери энергии при колебаниях системы, определяются по табл. 10.
Нормированные значения коэффициентов
динамичности ![]() определяются по графику рис. 5 или вычисляются по формуле
определяются по графику рис. 5 или вычисляются по формуле
 (19)
(19)
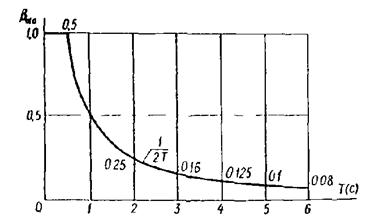
Рис. 5. График нормированного коэффициента динамичности вектора углового ускорения вращения сейсмического воздействия
2.17. Сейсмическое воздействие имеет произвольное направление в пространстве (см. п. 2.3 СНиП II-7-81). Ориентация в пространстве векторов ускорения поступательного движения и углового ускорения вращения грунтового основания сооружения определяется направляющими косинусами.
Вектор ускорения поступательного движения
грунта в основании сооружения задается в инерциальных осях ОХ1Х2Х3, в качестве
которых, в соответствии с п. 2.5, может быть принята ориентация по
сторонам света или какая-либо другая местная
система трех ортогональных направлений. Ориентация в пространстве вектора ![]() определяется направляющими косинусами
определяется направляющими косинусами ![]() в этих инерциальных осях ОХ1X2Х3. Значения направляющих косинусов
в этих инерциальных осях ОХ1X2Х3. Значения направляющих косинусов ![]() должны удовлетворять
условиям нормировки, имеющим вид
должны удовлетворять
условиям нормировки, имеющим вид
![]() , (20)
, (20)
Вектор углового ускорения вращения грунта
задается в осях Оx01,x02x03, неизменно связанных с основанием сооружения. В качестве
осей Оx01x02x03, согласно п. 2.5,
следует принимать систему главных осей сооружения. Ориентация в пространстве
вектора ![]() определяется
направляющими косинусами
определяется
направляющими косинусами ![]() , которые отсчитываются относительно этих
же осей Оx01x02x03. Значения направляющих косинусов
, которые отсчитываются относительно этих
же осей Оx01x02x03. Значения направляющих косинусов ![]() должны удовлетворять
условиям нормировки в виде
должны удовлетворять
условиям нормировки в виде
![]() . (21)
. (21)
Расчетные параметры ориентации векторов
сейсмического воздействия ![]() и
и ![]() определяются значениями направляющих
косинусов
определяются значениями направляющих
косинусов ![]() и
и ![]() (i = 1, 2, 3) в указанных осях. В расчетах следует исходить из двух групп значений направляющих
косинусов:
(i = 1, 2, 3) в указанных осях. В расчетах следует исходить из двух групп значений направляющих
косинусов:
проверочные (наиболее вероятные для заданного региона строительства) и основные расчетные.
Расчет на наиболее вероятные значения
направляющих косинусов является проверочным и выполняется в тех случаях, когда они известны
для данного региона строительства. Эти значения ![]() и
и ![]() определяются
по данным конкретной сейсмологической обстановки: геология региона местности; возможные очаги землетрясений и направления на них; опыт повреждений и разрушений
во время прошедших землетрясений; данные
обработки зарегистрированных процессов
движения грунта и т.д. При этом принимаемые проверочные значения направляющих косинусов должны удовлетворять условиям нормировки (20) и (21).
определяются
по данным конкретной сейсмологической обстановки: геология региона местности; возможные очаги землетрясений и направления на них; опыт повреждений и разрушений
во время прошедших землетрясений; данные
обработки зарегистрированных процессов
движения грунта и т.д. При этом принимаемые проверочные значения направляющих косинусов должны удовлетворять условиям нормировки (20) и (21).
Расчет на основные значения направляющих
косинусов ![]() и
и ![]() является обязательным во всех случаях.
является обязательным во всех случаях.
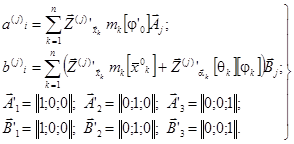
Основные расчетные значения направляющих косинусов вычисляются отдельно для каждой из учитываемых форм колебаний, исходя из условий максимума динамической реакции по рассматриваемой форме колебаний. Эти значения направляющих косинусов для j-ой формы колебаний определяются по следующим формулам:
 , (22)
, (22)где
Результаты вычислений расчетных значений направляющих косинусов сводятся в табл. 11.
Таблица 11
Расчет режима вынужденных колебаний
 , (24)
, (24)
где
![]()
Таблица 12
Максимальное значение коэффициента динамичности (24) имеет место при i = j, т.е. β(i)j < β(j)j при i ≠ j.
Результаты вычислений коэффициентов динамичности сводятся в табл. 12.
2.19. Если расчет упругой системы выполняется по методу сил и в соответствии с требованиями п. 2.7 выполнялось построение матрицы податливости [δ] (см. табл. 2), а также вычислялись внутренние усилия в поперечных сечениях элементов от единичной нагрузки (см. табл. 1), то основными расчетными параметрами являются векторы сейсмических сил и моментов, которые определяются по следующим формулам:

Коэффициент k в (25) соответствует k1 СНиП II-7-81, значения которого согласно табл. 3 СНиП II-7-81 предназначены для сооружений симметричных в плане, а так же для зданий регулярной конструктивной схемы, когда эффектами пространственной работы конструкций можно пренебречь.
Для сооружений промышленного или гражданского назначения, имеющих сложную конструктивную схему, необходим учет пространственной работы конструкций. В этих случаях значения коэффициента k отличаются от соответствующего значения k1 по СНиП II-7-81. Поэтому значение коэффициента k следует принимать по специальному обоснованию в соответствии с принятой конструктивной схемой сооружения и ее возможностями к развитию пластических деформаций и местных повреждений, не приводящих к выходу из строя сооружения в целом. Предварительное значение коэффициента k должно задаваться в задании на проектирование и затем корректироваться в ходе выполнения проектных работ и уточняться в соответствии с выбранной конструктивной схемой с последующим окончательным утверждением заказчиком.
Значения векторов сейсмических сил и моментов вычисляются для каждой из рассчитываемых форм колебаний и по каждому варианту ориентации векторов воздействия. Для каждой формы колебаний максимальные значения векторов сил и моментов определяются при значениях направляющих косинусов по (22). Результаты расчета сводятся в табл. 13.
Таблица 13
|
номер расчетной ориентации - i |
1 |
... |
j |
... |
6n |
|||||||||||||||||
|
номер формы колебаний - j |
1 |
2 |
... |
j |
... |
6n |
... |
1 |
2 |
... |
j |
... |
6n |
... |
1 |
2 |
... |
j |
... |
6n |
||
|
I-ое тело |
|
S(j,i)1I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||
|
S(j,i)2I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
S(j,i)3I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
|
M(j,i)1I |
... |
... |
... |
... |
... |
... |
... |
... |
|||||||||||||
|
M(j,i)2I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
M(j,i)3I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
. . . |
. . . |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
|
|
k-ое тело |
|
S(j,i)1k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||
|
S(j,i)2k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
S(j,i)3k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
|
M(j,i)1k |
... |
... |
... |
... |
... |
... |
... |
... |
|||||||||||||
|
M(j,i)2k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
M(j,i)3k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
. . . |
. . . |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
|
|
n-ое тело |
|
S(j,i)1n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||
|
S(j,i)2n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
S(j,i)3n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
|
M(j,i)1n |
... |
... |
... |
... |
... |
... |
... |
... |
|||||||||||||
|
M(j,i)2n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
M(j,i)3n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
Таблица 14
|
номер расчетной ориентации - i |
1 |
... |
j |
... |
6n |
|||||||||||||||||
|
номер формы колебаний - j |
1 |
2 |
... |
j |
... |
6n |
... |
1 |
2 |
... |
j |
... |
6n |
... |
1 |
2 |
... |
j |
... |
6n |
||
|
I-ое тело |
|
x(j,i)1I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||
|
x(j,i)2I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
x(j,i)3I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
|
α(j,i)1I |
... |
... |
... |
... |
... |
... |
... |
... |
|||||||||||||
|
α(j,i)2I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
α(j,i)3I |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
. . . |
. . . |
. . . |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
|
k-ое тело |
|
x(j,i)1k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||
|
x(j,i)2k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
x(j,i)3k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
|
α(j,i)1k |
... |
... |
... |
... |
... |
... |
... |
... |
|||||||||||||
|
α(j,i)2k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
α(j,i)3k |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
. . . |
. . . |
. . . |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
. . . |
... ... ... |
. . . |
... ... ... |
. . . |
|
n-ое тело |
|
x(j,i)1n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||
|
x(j,i)2n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
x(j,i)3n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
|
α(j,i)1n |
... |
... |
... |
... |
... |
... |
... |
... |
|||||||||||||
|
α(j,i)2n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
|
α(j,i)3n |
... |
... |
... |
... |
... |
... |
... |
... |
||||||||||||||
2.20. Если расчет упругой системы выполняется по методу деформаций и в соответствии с требованиями п. 2.8 выполнялось построение матрицы жесткости [r] (см. табл. 4), а также вычислялись внутренние усилия в поперечных сечениях упругих элементов от единичных перемещений, то основными расчетными параметрами являются векторы перемещений центров масс и углов вращения масс, которые определяются по следующим формулам:
 (26)
(26)
Значения векторов перемещений центров масс и углов поворота масс относительно их центра вычисляются для каждой из рассчитываемых форм колебаний и по каждому варианту ориентации векторов воздействия. Для каждой формы колебаний значения векторов (26) имеют максимальные величины при направляющих косинусах по (22). Результаты этого расчета сводятся в табл. 14.
Определение расчетных значений внутренних усилий в поперечных сечениях несущих конструкций сооружения
2.21. Если расчет упругой системы выполнялся по методу сил, то для каждой отдельной формы колебаний, по данным п. 2.19, по величинам фактических сейсмических сил и моментов, корректируются внутренние усилия от единичной нагрузки по данным п. 2.7:
 (27)
(27)
где N(j,i)1, N(j,i)2, N(j,i)3 - поперечные и продольные силы по j-ой форме при i-ой ориентации векторов сейсмического
воздействия; M(j,i)1, M(j,i)2, M(j,i)3 - изгибающие и крутящие моменты по j-ой форме при i-ой ориентации
векторов сейсмического воздействия для рассматриваемого сечения ![]() и
и ![]() - единичные усилия; S(j,i)lk, M(j,i)lk - фактические сейсмические силы и моменты по j-ой форме колебаний для i-ой
ориентации векторов сейсмического
воздействия.
- единичные усилия; S(j,i)lk, M(j,i)lk - фактические сейсмические силы и моменты по j-ой форме колебаний для i-ой
ориентации векторов сейсмического
воздействия.
Внутренние усилия (27) вычисляются по каждой форме колебаний и для каждого из вариантов ориентации векторов сейсмического воздействия. Для каждой формы колебаний максимум усилий (27) имеет место при значениях направляющих косинусов по (22). Результаты этого расчета сводятся в табл. 15.
2.22. Если расчет упругой системы выполняется по методу деформаций, то для каждой формы колебаний внутренние усилия от единичных перемещений и углов вращения по данным п. 2.8 корректируются на величины фактических перемещений и углов вращения масс по данным п. 2.20:

где ![]() и
и ![]() - единичные усилия; x(j,i)lk и α(j,i)lk - фактические перемещения и углы вращения масс по j-ой форме колебаний для i-ой ориентации векторов воздействия.
- единичные усилия; x(j,i)lk и α(j,i)lk - фактические перемещения и углы вращения масс по j-ой форме колебаний для i-ой ориентации векторов воздействия.
Таблица 15
Таблица 16
Таблица 17
|
Расчетные усилия
|
|
|
|
|
|
|
|
|
Расчетные значения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. . . |
. . . |
. . . |
. . . |
. . . |
. . . |
. . . |
|
|
|
|
|
|
|
|
|
|
|
. . . |
. . . |
. . . |
. . . |
. . . |
. . . |
. . . |
|
|
|
|
|
|
|
|
|
|
|
Проверочные значения |
|
|
|
|
|
|
|
По (28) внутренние усилия вычисляются для каждой формы колебаний и для каждого варианта ориентации векторов сейсмического воздействия. Максимум усилий для каждой формы колебаний имеет место при значениях направляющих косинусов по (22). Результаты этого расчета сводятся в табл. 16.
2.23. Для каждого i-го варианта ориентации векторов сейсмического воздействия по внутренним усилиям, соответствующим отдельным формам колебаний, N(j,i)l и M(j,i)l определяются расчетные значения внутренних усилий ![]() и
и ![]()
 , (29)
, (29)где f - число учитываемых форм колебаний при определении расчетных значений внутренних усилий в l-ом направлении (l = 1, 2, 3) поперечного сечения для рассматриваемого i-го варианта ориентации векторов сейсмического воздействия.
Результаты расчета сводятся в табл. 17.
2.24. Из расчетных
усилий (29),
соответствующих отдельным i-ым вариантам
ориентации векторов сейсмического воздействия, по данным табл. 17 принимаются максимальные значения усилий для проверки
несущей способности сечений в сочетании с
усилиями от других видов нагрузок. Принятый i-ый вариант значений ![]() и
и ![]() определяет наиболее опасную ориентацию векторов сейсмического
воздействия для рассчитываемого сооружения, при которой в рассматриваемом
сечении данной конструкции возникают максимальные значения
внутренних усилий.
определяет наиболее опасную ориентацию векторов сейсмического
воздействия для рассчитываемого сооружения, при которой в рассматриваемом
сечении данной конструкции возникают максимальные значения
внутренних усилий.
Приложение 1
ПРИМЕР РАСЧЕТА ПО ОПРЕДЕЛЕНИЮ СЕЙСМИЧЕСКОЙ НАГРУЗКИ НА КОЛОННЫ СИЛОСНОГО КОРПУСА
Приведенный в разделе 2 алгоритм расчета проиллюстрирован на простейшем примере определения нагрузки на колонны силосного корпуса (рис. 6). Параметры сооружения взяты из проекта железобетонного силосного корпуса, разработанного институтом Сибгипробиосинтез (г. Красноярск) для Андижанского гидролизного завода. В соответствии с проектом сечение колонн 0,6×0,6 м.
Описание расчетной динамической модели сооружения
1. По п. 2.2, пренебрегая деформациями железобетонного резервуара, примем расчетную динамическую модель в виде твердого цилиндра на упругих стойках, как показано на рис. 6. Нагрузку определим на несущие колонны без учета деформаций резервуара.
2. Согласно п. 2.3 инерционные параметры при полностью заполненном резервуаре равны: m1 = 636 · 103 кг; θ1I = θ2I = 1324 · 104 кг/м2; θ3I = 286 · 104 кг/м2.
3. По п. 2.4 железобетонные колонны моделируем упругими стержневыми конечными элементами с геометрическими характеристиками в соответствии с рис. 6.

Рис. 6. Конструктивная схема (а) и расчетная динамическая модель (б) силосного корпуса
4. Согласно п. 2.5 определяются геометрические параметры динамической модели:
- оси ОХ1Х2Х3 принимаем параллельными осям Ox01x02x03;
- начало осей Ox01x02x03 связываем с геометрическим центром фундамента (см. рис. 6);
- [f0] = Е - единичная матрица;
- твердому цилиндру присваиваем номер 1;
- вводим главные центральные оси инерции цилиндра Ix11x12x13;
- [φI] = Е;
- ![]() (м).
(м).
Описание упругих свойств расчетной динамической модели сооружения
5. По п. 2.6. для статического расчета рассматриваемой упругой системы воспользуемся программами, основанными на конечном элементе.
6. В соответствии с п. 2.7 от последовательного действия единичных сил и моментов выполняем статический расчет и определяем внутренние усилия в рассматриваемых сечениях, а также перемещения центра массы (табл. 1) и углы поворотов цилиндра. В качестве примера в табл. 18 сведены внутренние усилия для нижнего сечения колонны. В табл. 19 сведены единичные перемещения и углы поворотов. Табл. 19 определяет матрицу [δ].
Расчет режима свободных колебаний
7. Согласно п. 2.9 анализ матрицы [δ] (табл. 19) показывает, что она не содержит обособленных составляющих.
Таблица 18
Единичные внутренние усилия в нижнем сечении колонны
|
P, м
|
Рx1I = 1 (H) |
Рx2I = 1 (H) |
Рx3I = 1 (H) |
Mx1I = 1 (Hм) |
Mx2I = 1 (Hм) |
Mx3I = 1 (Hм) |
|
|
-0,2491 · 100 (-) |
0,1290 · 10-2 (-) |
-0,1775 · 10-5 (-) |
0,7003 · 10-4 (м-1) |
-0,1214 · 10-3 (м-1) |
-0,7402 · 10-1 (м-1) |
|
|
0,4105 · 10-2 (-) |
-0,2442 · 100 (-) |
-0,1101 · 10-4 (-) |
-0,3237 · 10-4 (м-1) |
-0,6098 · 10-4 (м-1) |
-0,4719 · 10-1 (м-1) |
|
|
0,1380 · 101 (-) |
-0,1338 · 101 (-) |
-0,2191 · 100 (-) |
0,1235 · 100 (м-1) |
0,1243 · 100 (м-1) |
-0,9324 · 10-3 (м-1) |
|
|
-0,1204 · 10-1 (м) |
0,7531 · 100 (м) |
-0,2448 · 10-3 (м) |
-0,1762 · 10-2 (-) |
0,1890 · 10-3 (-) |
0,1416 · 100 (-) |
|
|
-0,7684 · 100 (м) |
0,3591 · 10-2 (м) |
-0,1936 · 10-3 (м) |
0,2162 · 10-3 (-) |
-0,2236 · 10-2 (-) |
0,1410 · 100 (-) |
|
|
0,9745 · 10-2 (м) |
0,6088 · 10-2 (м) |
0,1288 · 10-5 (м) |
0,1824 · 10-5 (-) |
0,1005 · 10-4 (-) |
-0,6165 · 10-1 (-) |
Таблица 19
Матрица податливости

Таблица 20
Матрица инерционных параметров
Таблица 21
Частоты и коэффициенты колебаний
|
Ωj, Tj, Z |
1 |
2 |
3 |
4 |
5 |
6 |
|
Ωj (с-1) |
8,21 |
8,24 |
11,90 |
42,20 |
42,24 |
89,30 |
|
Tj (с) |
0,7653 |
0,7625 |
0,5280 |
0,1490 |
0,1487 |
0,07036 |
|
Z(j)x11 |
1,0 |
1,0 |
1,0 |
1,0 |
1,0 |
1,0 |
|
Z(j)x21 |
0,6691 · 10 |
-0,1494 |
0,6660 · 10 |
-0,1604 |
0,6235 |
-1499 · 101 |
|
Z(j)x31 |
0,6953 · 10 |
-0,5839 |
0,7155 · 10 |
0,1178 · 10 |
0,2241 |
-0,2015 · 10 |
|
Z(j)α11 |
-0,1186 |
0,2669 · 10 |
-0,2617 |
0,4306 · 10 |
0,1677 |
-0,1868 · 10 |
|
Z(j)α21 |
0,1773 · 10 |
0,1785 · 10 |
0,3925 · 10 |
-0,2685 |
-0,2690 |
-0,1245 · 10 |
|
Z(j)α31 |
0,4432 · 10 |
0,1127 · 10 |
-0,7355 |
0,2506 · 10 |
-0,5123 |
0,9283 · 10-5 |
Таблица 22
Условия ортогональности форм колебаний
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
1 |
0,9323 · 106 |
0,3775 · 10-2 |
0,7451 · 104 |
0,9631 · 104 |
-0,1427 · 103 |
0,8374 · 104 |
|
2 |
0,3769 · 102 |
2,0419 · 106 |
0,1752 · 103 |
-0,2684 · 104 |
-0,1135 · 103 |
-0,8377 · 103 |
|
3 |
0,3725 · 104 |
0,1826 · 103 |
0,1556 · 109 |
-0,5820 · 105 |
0,9313 · 104 |
0,4567 · 103 |
|
4 |
-0,8699 · 104 |
-0,6409 · 104 |
-0,5920 · 105 |
0,3442 · 109 |
0,8395 · 100 |
-0,7005 · 101 |
|
5 |
0,1241 · 103 |
-0,1229 · 103 |
0,9313 · 104 |
0,8419 · 100 |
0,1339 · 109 |
0,4427 · 101 |
|
6 |
0,9239 · 10 |
-0,8377 · 103 |
-0,4567 · 103 |
-0,8912 · 101 |
0,4437 · 101 |
0,2590 · 1013 |
8. В соответствии с п. 2.10 матрица инерционных параметров приведена в табл. 20. Матрица [В] = [δ][M] также не содержит обособленных составляющих.
9. По п. 2.11 задача по определению частот и форм колебаний решается по полной матрице [δ] для всей системы. Результаты решения по структуре алгоритма, показанного на рис. 6, сведены в табл. 21.
10. По п. 2.12 коэффициенты форм колебаний (см. табл. 21) нормированы на величину Z(j)x1I = 1 (j = 1 ÷ 6).
11. По п. 2.13 условия ортогональности форм колебаний показаны в табл. 22.
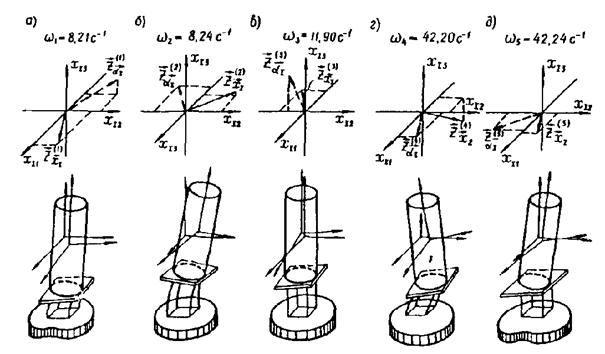
Рис. 7. Схемы движения силосного корпуса в пространстве по первым пяти формам колебаний
Данные расчета режима свободных колебаний свидетельствуют о следующем. По первым двум формам преобладают поступательные движения резервуара в горизонтальной плоскости. Для третьей формы характерно в основном вращение относительно вертикальной оси. Для четвертой и пятой форм колебаний в основном имеют место вращения относительно горизонтальных осей. В шестой форме доминируют поступательные вертикальные движения резервуара. Характер движения по первым пяти формам показан на рис. 7.
Определение расчетных параметров сейсмического воздействия
12. Согласно п. 2.14 для рассматриваемого примера примем условно расчетную балльность района, равную 8-ми баллам, для которой коэффициент А = 0,2.
Для площадки строительства в примере условно примем III категорию грунтов по СНиП II-7-81.
По рис. 6 рассматриваемое сооружение имеет размеры в плане 4×4 м, т.е. В = 4 м.
Для III категории грунтов при В = 4 м < 25 м по (11) или рис. 2 имеем χ1(4) = 1.
По (10) для районов 8-ми балльной зоны III категории грунтов, при В = 4 м имеем следующее значение инварианта ускорения поступательного движения сейсмического воздействия:
I(4) = 10 · 0,2 · 1 = 2 м/с2.
По п.
2.15 для
принятой III категории грунта площадка
строительства имеет: ![]() = 9 · 10-2
(м-1).
= 9 · 10-2
(м-1).
Для В = 4 м < 25 м и III категории грунтов по (13) или графикам рис. 3 имеем: χ2(4) = 1.
По (12) для III категории грунтов при В = 4 м имеем следующее значение инварианта относительной интенсивности углового ускорения вращения сейсмического воздействия:
I(4) = 9 · 10-2 · 1 = 9 · 10-2 (м-1).
14. По п. 2.16 для III категории грунтов по данным табл. 8 имеем: kгр = 0,7.
Сооружение выполнено из железобетонных конструкций, т.е. γ = 0,1. По данным табл. 9-10 имеем: uj = bj = 3. Значения периодов собственных колебаний даны в табл. 21.
Значения нормированных коэффициентов
значимости ускорения поступательного движения для III категории грунта ![]() определяется по графикам рис. 4 или вычисляется по (17). Для периодов, приведенных в табл. 21, эти значения
определяется по графикам рис. 4 или вычисляется по (17). Для периодов, приведенных в табл. 21, эти значения ![]() даны в табл. 23.
даны в табл. 23.
Таблица 23
Значения коэффициентов динамичности векторов сейсмического воздействия
Таблица 24
Значения направляющих косинусов векторов сейсмического воздействия
Значения нормированных коэффициентов
динамичности углового ускорения ![]() определяются по графику рис. 5 или вычисляются по (19).
Для заданных периодов эти значения даны в табл. 23.
определяются по графику рис. 5 или вычисляются по (19).
Для заданных периодов эти значения даны в табл. 23.
Ненормированные значения коэффициентов динамичности вычисляются по (14) и (18) при kгр = 0,7 и aj = bj = 3. Эти значения коэффициентов динамичности так же даны в табл. 23.
15. По п. 2.17 в качестве проверочных значений примем следующие группы направляющих косинусов векторов сейсмического воздействия.
1. Вектор ![]() направлен
по оси ОХ1 (см. рис. 6), а вектор
направлен
по оси ОХ1 (см. рис. 6), а вектор
![]() равен
нулю:
равен
нулю:
![]() ;
; ![]() .
.
2. Вектор ![]() направлен по оси ОХ3,
а вектор
направлен по оси ОХ3,
а вектор ![]() равен
нулю
равен
нулю
![]() ;
; ![]() .
.
3. Вектор ![]() направлен по оси Ох01 (см.
рис. 6), а вектор
направлен по оси Ох01 (см.
рис. 6), а вектор ![]() равен нулю.
равен нулю.
![]() ;
; ![]() .
.
4. Вектор ![]() направлен по оси Ох03, а вектор
направлен по оси Ох03, а вектор ![]() равен нулю:
равен нулю:
![]() ;
; ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
Основные расчетные значения направляющих косинусов вычисляются по формулам (22), (23) по заданным значениям коэффициентов форм колебаний, приведенным в табл. 21. Эти значения направляющих косинусов сведены в табл. 24.
Расчет режима вынужденных колебаний
16. По п. 2.18 для всех групп значений направляющих косинусов по табл. 24 и всех форм колебаний по табл. 21 по (24) определяются коэффициенты динамичности отдельных форм β(i)j, значения которых сведены в табл. 25.
Таблица 25
Коэффициенты динамичности отдельных форм колебаний
Таблица 26
Значения сейсмических сил и моментов
|
Векторы |
№№ составляющих |
Формы |
||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
|
1 |
998,045 |
0,0816 |
7,3739 |
-1,265 |
6,6304 |
0,0054 |
|
2 |
667,792 |
-0,1219 |
4,9154 |
2,029 |
4,1341 |
-0,0008 |
||
|
3 |
0,0069 |
-0,0005 |
0,0000 |
-1,4901 |
0,1486 |
-10,8056 |
||
|
|
4 |
-24,6337 |
0,0045 |
0,4016 |
-11,3358 |
23,1403 |
-0,2085 |
|
|
5 |
36,8259 |
0,0030 |
0,6023 |
7,0684 |
-37,1184 |
-0,1389 |
||
|
6 |
198,8490 |
0,0000 |
-243,8090 |
-0,0142 |
-1,5270 |
0,0000 |
||
|
2 |
|
1 |
0,1192 |
683,672 |
0,1163 |
5,7912 |
0,2151 |
0,0011 |
|
2 |
0,0797 |
-1021,4100 |
0,0775 |
-9,2891 |
0,1341 |
-0,0016 |
||
|
3 |
0,0000 |
-3,992 |
0,0000 |
6,8220 |
0,0048 |
-2,1514 |
||
|
|
4 |
-0,0029 |
37,9744 |
-0,0063 |
51,8965 |
0,7509 |
-0,0415 |
|
|
5 |
0,0044 |
25,3969 |
0,0095 |
-32,3600 |
-1,2045 |
-0,0277 |
||
|
6 |
0,0237 |
0,3464 |
-3,8442 |
0,0652 |
-0,0495 |
0,0000 |
||
|
3 |
|
1 |
745,661 |
4,5103 |
12,3672 |
-0,5839 |
5,1316 |
0,0025 |
|
2 |
498,822 |
-6,7384 |
8,244 |
0,9366 |
3,1985 |
-0,0037 |
||
|
3 |
0,0032 |
-0,0263 |
0,0000 |
-0,6878 |
0,115 |
-4,9889 |
||
|
|
4 |
-18,4044 |
0,2505 |
-0,6735 |
-5,2326 |
17,9094 |
-0,0962 |
|
|
5 |
27,5134 |
0,1675 |
1,0102 |
3,2628 |
-28,7276 |
-0,0641 |
||
|
6 |
148,564 |
0,0023 |
-408,908 |
-0,0066 |
-1,1818 |
0,0000 |
||
|
4 |
|
1 |
-163,912 |
609,939 |
-1,357 |
6,4121 |
-0,8135 |
-0,1767 |
|
2 |
-109,674 |
-911,248 |
-0,9046 |
-10,285 |
-0,5072 |
0,2648 |
||
|
3 |
-0,0011 |
-3,5614 |
-0,0000 |
7,5535 |
-0,0182 |
355,962 |
||
|
|
4 |
4,0457 |
33,8789 |
0,0736 |
57,4806 |
-2,8383 |
6,8675 |
|
|
5 |
-6,0480 |
22,6578 |
-0,1108 |
-35,8294 |
4,5544 |
4,5771 |
||
|
6 |
-32,6575 |
0,309 |
44,8673 |
0,0722 |
0,1874 |
-0,0000 |
||
|
5 |
|
1 |
997,151 |
22,1709 |
7,6513 |
-1,0489 |
6,6363 |
-0,0009 |
|
2 |
667,194 |
-33,1234 |
5,1003 |
1,6824 |
4,1377 |
0,0014 |
||
|
3 |
0,0069 |
-0,1295 |
0,0000 |
-1,2356 |
0,1487 |
1,8656 |
||
|
|
4 |
-24,6116 |
1,2315 |
-0,4167 |
-9,3992 |
23,1609 |
0,036 |
|
|
5 |
36,7929 |
0,8236 |
0,6250 |
5,8609 |
-37,1513 |
0,024 |
||
|
6 |
198,67 |
0,0112 |
-252,981 |
-0,0118 |
-1,5283 |
0,0000 |
||
|
6 |
|
1 |
458,408 |
-16,1377 |
4,1857 |
-2,8353 |
2,8122 |
0,3360 |
|
2 |
306,721 |
24,1097 |
2,7902 |
4,5478 |
1,7534 |
-0,5037 |
||
|
3 |
0,0032 |
0,0942 |
0,0000 |
-3,3399 |
0,0630 |
-677,063 |
||
|
|
4 |
-11,3144 |
-0,8964 |
-0,2280 |
-25,4075 |
9,8147 |
-13,0625 |
|
|
5 |
16,9143 |
-0,5995 |
0,3419 |
15,8428 |
-15,7433 |
-8,706 |
||
|
6 |
91,3323 |
-0,0082 |
-138,397 |
-0,0319 |
-0,6477 |
0,0000 |
||
|
7 |
|
1 |
447,861 |
205,32 |
2,7313 |
1,2347 |
3,1739 |
0,0002 |
|
2 |
299,664 |
-306,748 |
1,8207 |
-1,9805 |
1,9789 |
-0,0002 |
||
|
3 |
0,0031 |
-1,1989 |
0,0000 |
1,4545 |
0,0711 |
-0,3306 |
||
|
|
4 |
-11,0541 |
11,4045 |
-0,1487 |
11,0646 |
11,077 |
-0,0064 |
|
|
5 |
16,5252 |
7,6272 |
0,2231 |
-6,8993 |
-17,7682 |
-0,0042 |
||
|
6 |
89,2309 |
0,1040 |
-90,3071 |
0,0139 |
-0,7310 |
0,0000 |
||
|
8 |
|
1 |
0,0031 |
-1,1989 |
0,0000 |
1,4545 |
0,0711 |
-0,3306 |
|
2 |
0,0021 |
1,7911 |
0,0000 |
-2,333 |
0,0443 |
0,4956 |
||
|
3 |
0,0000 |
0,0070 |
0,0000 |
1,7134 |
0,0016 |
666,234 |
||
|
|
4 |
-0,0001 |
-0,0666 |
0,0000 |
13,0341 |
0,2482 |
12,8535 |
|
|
5 |
0,0001 |
-0,0445 |
0,0000 |
-8,1274 |
-0,3982 |
8,5667 |
||
|
6 |
0,0006 |
-0,0006 |
-0,0001 |
0,0164 |
-0,0163 |
0,0000 |
||
|
9 |
|
1 |
-255,331 |
261,369 |
-2,3216 |
3,5399 |
-1,5315 |
-0,0032 |
|
2 |
-170,842 |
-390,485 |
-1,5476 |
-5,6781 |
-0,9549 |
0,0048 |
||
|
3 |
-0,0018 |
-1,5261 |
0,0000 |
4,1701 |
-0,0343 |
6,5195 |
||
|
|
4 |
6,3021 |
14,5176 |
0,1204 |
31,7224 |
-5,3450 |
0,1258 |
|
|
5 |
-9,4212 |
9,7092 |
-0,1894 |
-18,7804 |
8,5737 |
0,0838 |
||
|
6 |
-50,8717 |
0,1324 |
76,7613 |
0,0399 |
0,3527 |
0,0000 |
||
|
10 |
|
1 |
5,3501 |
-3,9764 |
-8,063 |
-0,0366 |
-0,0676 |
0,0000 |
|
2 |
3,5798 |
5,9487 |
-5,3748 |
0,0587 |
-0,0422 |
0,0000 |
||
|
3 |
0,0000 |
0,0232 |
0,0000 |
-0,0431 |
-0,0015 |
0,0097 |
||
|
|
4 |
-0,132 |
-0,2209 |
0,4391 |
-0,3279 |
-0,2300 |
0,0002 |
|
|
5 |
0,1974 |
-0,1477 |
-0,6586 |
0,2045 |
0,3786 |
0,0001 |
||
|
6 |
1,0659 |
-0,0020 |
266,595 |
-0,0004 |
0,0156 |
0,0000 |
||
Таблица 27
Значения внутренних усилий в нижнем сечении колонны
|
Векторы |
№№ составляющих |
Формы |
||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
|
1 |
-257,1108 |
-0,0205 |
9,6333 |
0,3167 |
-1,5683 |
-0,0013 |
|
2 |
-168,363 |
0,0300 |
10,3353 |
-0,5005 |
-0,9087 |
0,002119 |
||
|
3 |
485,145 |
0,2767 |
3,8517 |
-4,6553 |
1,8314 |
2,3426 |
||
|
|
1 |
519,105 |
-0,09277 |
-30,909 |
1,5629 |
2,7694 |
0,003132 |
|
|
2 |
-736,550 |
-0,06312 |
-40,0270 |
0,95931 |
-5,2073 |
-0,001791 |
||
|
3 |
1,5327 |
0,000050 |
15,1326 |
0,000952 |
0,1835 |
-0,0000123 |
||
|
2 |
|
1 |
-0,03070 |
-171,637 |
0,15189 |
-1,4500 |
-0,05089 |
-0,0002637 |
|
2 |
-0,02013 |
252,215 |
0,162958 |
2,2893 |
-0,02948 |
0,000421 |
||
|
3 |
0,05783 |
2318,83 |
0,060730 |
21,3128 |
0,059430 |
0,466433 |
||
|
|
1 |
0,061985 |
-777,464 |
-0,487356 |
7,15534 |
0,089867 |
-0,00062 |
|
|
2 |
-0,08795 |
-529,000 |
-0,631112 |
-4,3918 |
-0,16897 |
-0,00035 |
||
|
3 |
0,000183 |
0,42303 |
0,23859 |
-0,0043 |
0,00595 |
-0,0000024 |
||
|
3 |
|
1 |
-192,091 |
-1,1323 |
16,1567 |
0,146209 |
-1,21384 |
-0,00061 |
|
2 |
-125,788 |
1,6639 |
17,3339 |
-0,23082 |
-0,703325 |
0,0009» |
||
|
3 |
362,462 |
15,2978 |
6,4599 |
-2,14892 |
1,41748 |
1,08159 |
||
|
|
1 |
387,835 |
-5,1290 |
-51,8404 |
0,721457 |
2,1434 |
-0,001446 |
|
|
2 |
-550,293 |
-3,4899 |
-67,1311 |
0,44282 |
-4,0301 |
-0,000827 |
||
|
3 |
1,14518 |
0,0027 |
25,3799 |
0,000439 |
0,1420 |
-0,00000571 |
||
|
4 |
|
1 |
42,2256 |
-153,126 |
-1,7727 |
-1,6055 |
0,1924 |
0,04364 |
|
2 |
27,6508 |
225,014 |
-1,9019 |
2,5347 |
0,1115 |
-0,0698 |
||
|
3 |
-79,6769 |
2068,75 |
-0,7038 |
23,5978 |
-0,2247 |
-77,1723 |
||
|
|
1 |
-85,2543 |
-693,616 |
5,6881 |
-7,9225 |
-0,3398 |
0,1031 |
|
|
2 |
10,966 |
-471,948 |
7,3660 |
-4,8627 |
0,6389 |
0,05902 |
||
|
3 |
-0,2517 |
0,3774 |
-2,7848 |
-0,0048 |
-0,0225 |
0,000408 |
||
|
5 |
|
1 |
-256,877 |
-5,5660 |
9,9957 |
0,2626 |
-1,5697 |
0,000228 |
|
2 |
-168,212 |
8,1791 |
10,7241 |
-0,4146 |
-0,9095 |
-0,000365 |
||
|
3 |
484,710 |
75,1978 |
3,9966 |
-3,86005 |
1,8331 |
-0,4044 |
||
|
|
1 |
518,640 |
-25,2126 |
-32,0724 |
1,2959 |
2,7719 |
0,0005407 |
|
|
2 |
-735,890 |
-17,1551 |
-41,5328 |
0,7954 |
-5,2119 |
0,0003093 |
||
|
3 |
1,5314 |
0,01371 |
15,7019 |
0,0007897 |
0,1837 |
0,000002138 |
||
|
6 |
|
1 |
-118,091 |
4,0513 |
5,4683 |
0,7099 |
-0,6652 |
-0,08300 |
|
2 |
-77,3301 |
-5,9533 |
5,8667 |
-1,1208 |
-0,3854 |
0,13278 |
||
|
3 |
222,830 |
-54,7345 |
2,1864 |
-10,4343 |
0,7768 |
146,787 |
||
|
|
1 |
238,428 |
18,3516 |
-17,5456 |
3,5031 |
1,1746 |
-0,19625 |
|
|
2 |
-338,302 |
12,4867 |
-22,7211 |
2,1501 |
-2,2086 |
-0,1122 |
||
|
3 |
0,704046 |
-0,00898 |
8,5899 |
0,00213 |
0,0778 |
-0,000776 |
||
|
7 |
|
1 |
-115,374 |
-51,5460 |
3,5681 |
-0,3091 |
-0,7507 |
-0,00000405 |
|
2 |
-75,5509 |
75,7450 |
3,8281 |
0,4880 |
-0,4350 |
0,0000648 |
||
|
3 |
217,703 |
696,390 |
1,4266 |
4,5439 |
0,8767 |
0,07168 |
||
|
|
1 |
232,942 |
-233,488 |
-11,4489 |
-1,5235 |
1,3257 |
-0,0000958 |
|
|
2 |
30,518 |
-153,869 |
-14,8260 |
-0,9383 |
-2,4926 |
-0,0000548 |
||
|
3 |
0,6878 |
0,1270 |
5,6051 |
-0,000929 |
0,08788 |
-0,000000379 |
||
|
8 |
|
1 |
-0,0008021 |
0,30097 |
0,00000255 |
-0,36419 |
-0,016824 |
0,08167 |
|
2 |
-0,000525 |
-0,4422 |
0,00000273 |
0,57497 |
-0,00974 |
-0,1306 |
||
|
3 |
0,00151 |
-4,0662 |
0,00000102 |
5,3528 |
0,01964 |
-144,439 |
||
|
|
1 |
0,00161 |
1,3633 |
-0,00000819 |
-1,7971 |
0,02970 |
0,19311 |
|
|
2 |
-0,00229 |
0,92763 |
-0,00001060 |
-1,1030 |
-0,05586 |
0,1104 |
||
|
3 |
0,00000478 |
-0,000741 |
0,00000401 |
-0,00109 |
0,00196 |
0,000763 |
||
|
9 |
|
1 |
65,7763 |
-65,6170 |
-3,0329 |
-0,8863 |
0,3622 |
0,000799 |
|
2 |
43,0726 |
96,4220 |
-3,2539 |
1,3993 |
0,2099 |
-0,00127 |
||
|
3 |
-124,115 |
886,4910 |
-1,2126 |
13,0277 |
-0,4230 |
1,4134 |
||
|
|
1 |
132,8030 |
297,2250 |
9,7316 |
-4,3737 |
-0,6397 |
0,0018 |
|
|
2 |
188,4330 |
202,2370 |
12,6022 |
-2,6845 |
1,2028 |
0,00108 |
||
|
3 |
-0,3921 |
0,1617 |
-4,7643 |
-0,002665 |
-0,0424 |
0,00000747 |
||
|
10 |
|
1 |
-1,3782 |
0,9982 |
-10,5333 |
0,009163 |
0,01599 |
0,00000118 |
|
2 |
-0,9025 |
-1,1466 |
-11,3012 |
-0,01446 |
0,00927 |
-0,00000189 |
||
|
3 |
2,6006 |
-13,4869 |
-4,2116 |
-0,1346 |
-0,01868 |
-0,002095 |
||
|
|
1 |
2,7827 |
4,5219 |
33,7983 |
0,04521 |
-0,02825 |
0,000002801 |
|
|
2 |
-3,9483 |
3,0768 |
43,7678 |
0,02775 |
0,08311 |
0,00000160 |
||
|
3 |
0,008216 |
-0,002460 |
-16,5469 |
0,00002755 |
-0,001872 |
0,00000001108 |
||
Таблица 28
Расчетные значения внутренних усилий в нижнем сечении колонны
|
№ ориентации |
N(i)1 (кН) |
N(i)2 (кН) |
N(i)3 (кН) |
|
M(i)1 (кН) |
M(i)2 (кН) |
M(i)3 (кН) |
|
|
1 |
251,1848 |
168,6191 |
485,1187 |
571,7222 |
520,0262 |
737,6048 |
15,2084 |
902,618 |
|
2 |
171,6061 |
252,2104 |
2318,0979 |
2338,0839 |
777,4330 |
529,0186 |
4,8562 |
940,3649 |
|
3 |
192,6813 |
126,9012 |
370,3721 |
436,3547 |
391,2831 |
554,2911 |
25,3958 |
687,9595 |
|
4 |
158,8308 |
226,7067 |
2069,6685 |
2088,0890 |
698,8642 |
487,1653 |
4,5365 |
851,9165 |
|
5 |
257,0547 |
168,7401 |
490,5136 |
490,9248 |
520,2018 |
737,4021 |
15,7744 |
902,8833 |
|
6 |
118,3610 |
77,5539 |
272,3136 |
306,8888 |
239,1052 |
338,5301 |
7,0407 |
414,5159 |
|
7 |
126,3455 |
107,0114 |
729,5402 |
748,0925 |
329,9224 |
366,9704 |
5,6514 |
493,5058 |
|
8 |
4,7935 |
7,3697 |
144,5563 |
144,8280 |
2,2636 |
1,4454 |
1,5273 |
3,0896 |
|
9 |
7,8552 |
105,6115 |
859,1398 |
901,3826 |
325,3057 |
276,3813 |
4,2414 |
426,8822 |
|
10 |
10,9628 |
11,3036 |
14,3597 |
21,3109 |
34,2044 |
44,0752 |
16,5400 |
58,1678 |
17. Расчет упругой системы выполнялся по методу сил для формирования матрицы податливости (см. табл. 19) и внутренние усилия в нижнем сечении колонны определялись от единичных сил и моментов (см. табл. 18). Поэтому согласно п. 2.19 основными расчетными параметрами являются векторы сейсмических сил и моментов, значения которых вычисляются по (25).
Рассматриваемое сооружение не относится к категории особо ответственных, допуская в нем образование пластических деформаций, примем k = 0,25.
Значения векторов сейсмических сил и моментов для всех вариантов ориентации векторов воздействия и для всех форм колебаний сведены в табл. 26.
Определение расчетных значений внутренних усилий в поперечном сечении колонны силосного корпуса
20. Согласно п. 2.21 по (27) на основании данных п. 6 и п. 17 выполняется корректировка единичных внутренних усилий (см. табл. 18) на фактические величины сейсмических сил и моментов, значения которых даны в табл. 26. Результаты этой корректировки сведены в табл. 27.
22. Согласно п. 2.23 (29) и данным табл. 27 для каждого варианта ориентации векторов сейсмического воздействия определяются расчетные значения внутренних усилий, значения которых сведены в табл. 28.
23. По п. 2.24 из расчетных значений внутренних усилий, соответствующих различным вариантам ориентации векторов сейсмического воздействия, выбираются максимальные значения, по которым, в сочетании с усилиями от других нагрузок, проверяется прочность колонны. Соответствующие этим максимальным усилиям направляющие косинусы (табл. 29) определяют «опасную» ориентацию векторов сейсмического воздействия.
Таблица 29
Значения направляющих косинусов опасной ориентации векторов сейсмического воздействия для нижнего сечения колонны
Приложение 2
ПРИМЕР РАСЧЕТА СЕЙСМИЧЕСКОЙ НАГРУЗКИ НА КОЛОННЫ И ДИАФРАГМЫ ЖЕСТКОСТИ ТРЕХЭТАЖНОГО КАРКАСНОГО ЗДАНИЯ
В качестве примера рассматривается трехэтажное каркасное здание с диафрагмами жесткости, конструктивная схема которого показана на рис. 8.

Рис. 8. Конструктивная схема (а) и расчетная динамическая модель (б) трехэтажного каркасного здания с диафрагмами жесткости
В правой части здания расположена лестничная клетка, стены которой являются диафрагмами жесткости.
В примере требуется определить сейсмическую нагрузку на колонны каркаса и на диафрагмы жесткости для рассматриваемого здания.
Описание расчетной динамической модели здания
Согласно п. 2.2 расчетную динамическую модель принимаем в виде трех твердых пластин, соединенных между собой и с основанием стержневыми и пластинчатыми упругими элементами, как показано на рис. 8.
По п. 2.3 каждый диск расчетной динамической модели имеет три системы свободы и совершает плоскопараллельные колебания в горизонтальной плоскости. Всего система имеет 3×3 = 9 степеней свободы. Инерционные параметры масс равны:
мI = 0,651×106 кг; мII = 0,666×106 кг; мIII = 0,186×106 кг; θ3I = 0,1612×109 кг · м2; θ3II = 0,1582×109 кг · м2; θ3III = 0,6222×107 кг · м2
По п. 2.4 железобетонные колонны каркаса моделируем стержневыми элементами, а конструктивные элементы лестничной клетки - упругими пластинами с геометрическими характеристиками их распределения в соответствии с рис. 8.
Описание геометрических параметров динамической модели выполняется согласно п. 2.5:
- инерциальные оси отсчета ОX1Х2X3 принимаем параллельными осям Оx01x02x03, (cм. рис. 8);
- начало осей ОХ1X2X3 связываем с геометрическим центром фундамента в плане;
- [φ0] = Е - единичная матрица;
- устанавливаем нумерацию дисков перекрытий снизу вверх, I, II, III (см. рис. 8);
- с каждым диском связываются системы отсчета КХК1XК2ХК3 (К = I, II, III) (см. рис. 8). Эти оси являются главными и центральными осями инерции дисков;
- все оси КХК1XК2ХК3 параллельны осям Ox01x02x03, см. рис. 8. Поэтому [φk] = Е - единичная матрица;
- векторы ![]() для всех дисков динамической
модели равны (в
м):
для всех дисков динамической
модели равны (в
м): ![]() = ||0,17;
1,2; 4,2||;
= ||0,17;
1,2; 4,2||; ![]() = ||0,17; 7,8||;
= ||0,17; 7,8||; ![]() = ||0,17; 16,17; 11,4||.
= ||0,17; 16,17; 11,4||.
Единичные внутренние усилия в нижнем сечении колонны К-2 на уровне первого этажа
|
|
Px1I = 1 (Н) |
Px2I = 1 (Н) |
Mx3I = 1 (Н· м) |
Px1II = 1 (Н) |
Px2II = 1 (Н) |
Mx3II = 1 (Н· м) |
Px1III = 1 (Н) |
Px2III = 1 (Н) |
Mx3III = 1 (Н· м) |
|
|
-0,3543 · 10-1 (-) |
0,1304 · 10-2 (-) |
-0,1492 · 10-2 (м-1) |
0,6110 · 10-1 (-) |
0,3543 · 10-2 (-) |
-0,2548 · 10-2 (м-1) |
-0,2587 · 10-1 (-) |
0,5029 · 10-2 (-) |
-0,3117 · 10-2 (м-1) |
|
|
0,1890 · 10-2 (-) |
-0,5296 · 10-1 (-) |
0,9545 · 10-4 (м-1) |
0,5127 · 10-2 (-) |
-0,7637 · 10-1 (-) |
0,2280 · 10-3 (м-1) |
0,2055 · 10-2 (-) |
-0,8099 · 10-1 (-) |
0,2782 · 10-3 (м-1) |
|
|
-0,7659 · 10-1 (-) |
0,8677 · 10-1 (-) |
0,3339 · 10-2 (м-1) |
-0,2349 · 100 (-) |
0,2454 · 100 (-) |
-0,9934 · 10-2 (м-1) |
-0,1110 · 100 (-) |
0,3135 · 100 (-) |
-0,1389 · 10-1 (м-1) |
|
|
-0,3952 · 10-2 (м) |
0,1116 · 100 (м) |
-0,1998 · 10-3 (-) |
-0,1071 · 10-1 (м) |
0,1614 · 100 (м) |
-0,4765 · 10-3 (-) |
-0,4308 · 10-2 (м) |
0,1713 · 100 (м) |
-0,5830 · 10-3 (-1) |
|
|
0,2225 · 10-2 (м) |
-0,1032 · 10-3 (м) |
0,1036 · 10-3 (-) |
0,3921 · 10-2 (м) |
-0,2758 · 10-3 (м) |
0,1740 · 10-3 (-) |
0,1496 · 10-2 (м) |
-0,3881 · 10-3 (м) |
0,2176 · 10-3 (-) |
|
|
-0,2225 · 10-2 (м) |
-0,1032 · 10-3 (м) |
0,1036 · 10-3 (-) |
0,3921 · 10-2 (м) |
-0,2758 · 10-3 (м) |
0,1740 · 10-3 (-) |
0,1496 · 10-2 (м) |
0,3881 · 10-3 (м) |
-0,2176 · 10-3 (-) |
Таблица 31
Единичные погонные внутренние усилия в пластинчатом элементе П-1 на уровне первого этажа
|
Р, М N, T |
Px1I = 1 (Н) |
Px2I = 1 (Н) |
Mx3I = 1 (Н· м) |
Px1II = 1 (Н) |
Px2II = 1 (Н) |
Mx3II = 1 (Н· м) |
Px1III = 1 (Н) |
Px2III = 1 (Н) |
Mx3III = 1 (Н·м) |
|
Nx1 (Н· м) |
0,1963 · 10-1 (м-1) |
-0,5762 · 10-2 (м-1) |
0,1722 · 10-2 (м-2) |
0,5267 · 10-1 (м-1) |
-0,1555 · 10-1 (м-1) |
0,3821 · 10-2 (м-2) |
0,4962 · 10-2 (м-1) |
-0,3000 · 10-1 (м-1) |
0,7410 · 10-2 (м-2) |
|
Ny1 (Н· м) |
0,4921 · 10-1 (м-1) |
-0,4416 · 10-1 (м-1) |
0,4973 · 10-2 (м-2) |
0,1203 · 100 (м-1) |
-0,1035 · 100 (м-1) |
0,8962 · 10-2 (м-2) |
0,2591 · 10-1 (м-1) |
-0,1734 · 100 (м-1) |
0,2042 · 10-1 (м-2) |
|
Tx1y1 (Н· м) |
0,4818 · 10-2 (м-1) |
-0,2893 · 10-1 (м-1) |
-0,5634 · 10-2 (м-2) |
-0,8836 · 10-1 (м-1) |
-0,3199 · 10-1 (м-1) |
-0,7144 · 10-2 (м-2) |
0,5357 · 10-1 (м-1) |
-0,2984 · 10-1 (м-1) |
-0,2946 · 10-2 (м-2) |

Таблица 32
Матрица податливости

Таблица 33
Матрица инерционных параметров
Описание упругих свойств расчетной динамической модели
По п. 2.6 для статического расчета упругой системы применим программы расчета, основанные на методе конечных элементов.
Согласно п. 2.7 от последовательного действия единичных сил и моментов выполняем статический расчет и определяем внутренние усилия в узлах упругих элементов, а также определяем перемещения и углы поворотов дисков. В качестве примера в табл. 30 приведены внутренние усилия в нижнем сечении колонны К-2 в уровне 1 этажа, а в табл. 31 даны расчетные внутренние усилия для пластины П-1 (см. рис. 10). Матрица податливости приведена в табл. 32.
Расчет режима свободных колебаний
Согласно п. 2.6 анализ матрицы [δ] показывает, что она не содержит обособленных составляющих.
Согласно п. 2.10 матрица инерционных параметров рассматриваемой системы приведена в табл. 33.
Матрица [В] = [δ][М] так же не содержит обособленных составляющих.
По п. 2.11 задача по определению частот и форм собственных колебаний решается по полной матрице [В]. Результаты решений сведены в табл. 34.
По п. 2.12 полученные коэффициенты форм колебаний нормированы на значения Z(j)x1I (j = 1 ÷ 9), которые приняты за единицу, см. табл. 34.
Согласно п. 2.13 результаты проверки условий ортогональности найденных форм колебаний сведены в табл. 35.
На рис. 9 показаны схемы движения масс дисков перекрытий и покрытия, а также ориентация векторов коэффициентов по первым пяти формам колебаний.
Таблица 34
Значения параметров форм колебаний
|
j |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
2 |
Ωj(c-1) |
6,7487 - 00 |
7,4057 - 00 |
2,0741 - 01 |
2,3976 - 01 |
3,1092 - 01 |
3,6348 - 01 |
5,6131 - 01 |
1,4700 - 02 |
1,9402 + 02 |
|
3 |
Tj(c) |
0,930 - 00 |
0,8484 - 00 |
0,3029 - 00 |
0,2621 - 00 |
0,2021 - 00 |
0,1729 - 00 |
0,112 - 00 |
0,0927 - 00 |
0,0324 - 00 |
|
4 |
z(j)x1I |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
1,0000 - 00 |
|
5 |
z(j)x2I |
-5,7781 - 01 |
2,1326 - 00 |
-5,4208 - 00 |
1,4506 - 00 |
-1,0074 - 01 |
1,7320 + 01 |
-2,6112 - 03 |
5,4045 - 05 |
-8,9978 - 03 |
|
6 |
z(j)x1II |
2,4581 - 00 |
2,3589 - 00 |
5,3189 - 01 |
1,8092 - 01 |
-4,3210 - 01 |
-5,7685 - 01 |
2,3108 - 00 |
-1,3330 - 02 |
-1,7625 - 00 |
|
7 |
z(j)x2II |
-1,2970 - 00 |
4,5609 - 00 |
-2,9522 - 00 |
4,1022 - 01 |
4,7803 - 02 |
-1,3622 + 01 |
6,9708 - 02 |
-9,0103 - 03 |
1,1126 - 02 |
|
8 |
z(j)x1III |
1,1552 - 00 |
1,0025 - 00 |
7,2504 - 00 |
-6,1935 - 00 |
4,8371 - 01 |
3,2114 - 00 |
2,7520 - 00 |
-1,1570 - 00 |
3,3309 - 00 |
|
9 |
z(j)x2III |
-1,8143 - 00 |
6,1742 - 00 |
1,3970 - 01 |
-2,9398 - 00 |
-1,7945 - 02 |
1,5243 + 01 |
-2,5661 - 01 |
1,9179 - 02 |
-1,8350 - 02 |
|
10 |
z(j)α3I |
4,3930 - 02 |
4,2916 - 02 |
5,0652 - 02 |
5,2670 - 02 |
4,2962 - 02 |
3,3260 - 02 |
-1,0801 - 01 |
9,0400 - 02 |
-8,8560 - 02 |
|
11 |
z(j)α3II |
1,0539 - 01 |
9,9938 - 02 |
4,2597 - 02 |
3,5882 - 02 |
-2,3990 - 02 |
-5,8456 - 02 |
-2,0360 - 01 |
6,1120 - 05 |
1,6963 - 01 |
|
12 |
z(j)α3II |
1,5469 - 01 |
1,2633 - 01 |
-9,0100 - 01 |
-7,0492 - 01 |
4,4528 - 02 |
2,2500 - 01 |
-9,4370 - 01 |
2,7403 - 01 |
-7,2835 - 01 |
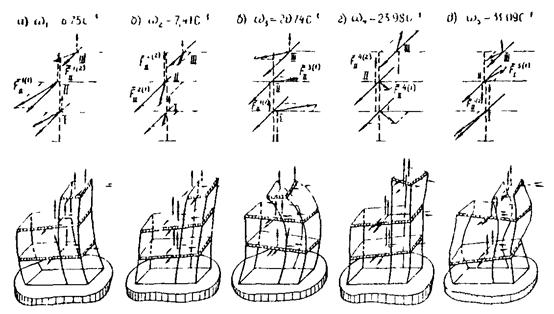
Рис. 9. Схема движения дисков перекрытий трехэтажного каркасного здания по первым пяти формам колебаний
Определение расчетных параметров сейсмического воздействия
По п. 2.14 примем расчетную балльность равной 8-ми баллам, для которой, согласно СНиП II-7-81, А = 0,2.
Для площадки строительства примем грунты III категории по СНиП II-7-81.
По данным рис. 8 здание имеет размеры в плане 12×52 м, т.е. для расчета В = 12 м.
По (11) или графикам рис. 2 для III категории грунтов при В = 12 м < 25 м имеем χ1(12) = 1.
По (10) значение инварианта интенсивности ускорения поступательного движения грунта равно:
I(12) = 10 × 0,2 × 1 = 2 м/с2.
По п.
2.15 для III категории грунтов - ![]() = 9 × 10-2
(м-1).
= 9 × 10-2
(м-1).
По (13) или графикам рис. 3 для III категории грунтов при В = 12 м имеем χ2(12) = 1.
По (12) имеем:
W(12) = 9 × 10-2 × 1 = 9 × 10-2 (м-1).
Таблица 35
Условия ортогональности форм колебаний
|
№ п/п |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
001 |
+0,910410-02 |
-0,391410-08 |
-0,122710-09 |
+0,491610-10 |
-0,346010-10 |
+0,113710-08 |
+0,124710-09 |
+0,723310-11 |
-0,881110-12 |
|
002 |
-0,391410-08 |
+0,304210-01 |
+0,311010-10 |
+0,202710-09 |
-0,233710-10 |
+0,133210-08 |
+0,109810-09 |
+0,636610-11 |
-0,224510-11 |
|
003 |
-0,122710-09 |
+0,310910-10 |
+0,776010-01 |
+0,100910-08 |
+0,248710-09 |
+0,532110-09 |
+0,216010-10 |
-0,821410-11 |
-0,125010-10 |
|
004 |
+0,491410-10 |
+0,202810-09 |
+0,100910-08 |
+0,146910-01 |
+0,854110-10 |
+0,901010-09 |
+0,201510-09 |
+0,162010-11 |
-0,932210-11 |
|
005 |
-0,546210-10 |
+0,233410-10 |
+0,248710-09 |
+0,854110-10 |
+0,122810-02 |
+0,651710-09 |
+0,370710-10 |
+0,148510-11 |
+0,204210-11 |
|
006 |
+0,113710-08 |
+0,133310-08 |
+0,532110-09 |
+0,900010-09 |
+0,651710-09 |
+0,365910-00 |
+0,201810-08- |
+0,365110-10 |
-0,190410-11 |
|
007 |
+0,124710-09 |
+0,110010-09 |
+0,214810-10 |
+0,201510-09 |
+0,370610-10 |
+0,201810-08 |
+0,196110-01 |
-0,284210-13 |
+0,173910-10 |
|
008 |
-0,724710-11 |
+0,638110-11 |
-0,821010-11 |
-0,162010-11 |
+0,148510-11 |
+0,363910-10 |
-0,284210-13 |
+0,268410-02 |
+0,906610-11 |
|
009 |
-0,866810-12 |
-0,224510-12 |
-0,126710-10 |
-0,932210-11 |
+0,202810-11 |
-0,190410-11 |
+0,171610-10 |
+0,906610-11 |
+0,139010-01 |
По п. 2.16 для III категории грунтов по табл. 8 kгр = 0,7.
Сооружение выполнено из железобетонных конструкций, при колебаниях которых коэффициент потерь энергии равен 0,1. Для γ = 0,1 по табл. 9 и 10 αγ = bγ = 3.
Значения нормативных коэффициентов
динамичности ускорения поступательного движения сейсмического воздействия для III категории грунтов определяется по (17) или графикам рис. 4 в зависимости от периодов собственных колебаний (см. табл. 34). Для рассматриваемого примера ![]() сведены в
табл. 36.
сведены в
табл. 36.
Значения нормативных коэффициентов
динамичности углового ускорения вращения сейсмического воздействия вычисляются
по (19) или по рис. 5. Для заданных периодов собственных колебаний ![]() также сведена
в табл. 36.
также сведена
в табл. 36.
Ненормированные значения ![]() и
и ![]() определяются
по (14) и (11) при kгр = 0,7 и αγ = bγ = 3. Эти значения
определяются
по (14) и (11) при kгр = 0,7 и αγ = bγ = 3. Эти значения ![]() и
и ![]() сведены в табл. 36.
сведены в табл. 36.
Согласно п. 2.17 в качестве проверенных значений направляющих
косинусов примем их группу, соответствующую ориентации ![]() и
и ![]() по осям ОХ1Х2Х3
и Ox01x02x03, т.е.
по осям ОХ1Х2Х3
и Ox01x02x03, т.е.
1. ![]() и
и ![]() ;
;
2. ![]() и
и ![]() ;
;
3. ![]() и
и ![]() ;
;
4. ![]() и
и ![]() ;
;
5. ![]() и
и ![]() ;
;
6. ![]() и
и ![]() ;
;
i = 1, 2, 3.
Группа основных расчетных значений направляющих косинусов определена по (20)-(23) и для заданных значений коэффициентов форм колебаний (см. табл. 34) сведена в табл. 37.
Таблица 36
Значения коэффициентов динамичности векторов сейсмического воздействия
Расчет режима вынужденных колебаний
По п. 2.18 значения коэффициентов динамичности β(i)j для всех форм и вариантов ориентации векторов сейсмического воздействия определены по (24) и сведены в табл. 38. В табл. 39 даны отношения β(i)j / β(1)j (i = 1 ÷ 15; j = 1 ÷ 9).
Расчет упругой системы выполнялся по методу сил. Внутренние усилия в проверяемых элементах К-2 и П-1 определялись от единичных сил и моментов (см. табл. 30-31). Поэтому в соответствии с п. 2.19 основными расчетными параметрами являются величины сейсмических сил и моментов, значения которых определяются по (25).
Поскольку рассматриваемое сооружение не относится к особо ответственным, допуская в нем образования пластических деформаций, примем k = 0,25.
Величины сейсмических сил и моментов, вычисленные по (25) для
первого варианта ориентации векторов сейсмического воздействия и всех форм колебаний,
сведены в табл. 40. Для всех остальных вариантов ![]() и
и ![]() сейсмические силы и моменты изменяются пропорционально коэффициентам
табл. 39.
сейсмические силы и моменты изменяются пропорционально коэффициентам
табл. 39.
Определение расчетных значений внутренних усилий в нижних сечениях колонны К-2 и панели П-1
Согласно п. 2.21
по (27) выполняется корректировка
единичных внутренних усилий, приведенных в табл. 30 и 31 на фактические
величины сейсмических сил и моментов, значения которых даны
в табл. 40. Результаты вычислений для первого
варианта ориентации ![]() и
и ![]() сведены в табл.
41 и 42 (для нижних сечений колонны К-2 и панели П-1). Для всех остальных вариантов ориентации
сведены в табл.
41 и 42 (для нижних сечений колонны К-2 и панели П-1). Для всех остальных вариантов ориентации ![]() и
и ![]() значения
внутренних
усилий пропорциональны коэффициентам табл. 39.
значения
внутренних
усилий пропорциональны коэффициентам табл. 39.
Согласно п. 2.23 по (29) с использованием данных табл. 39 и табл. 41 и 42 для каждого варианта ориентации векторов сейсмического воздействия определяются расчетные значения внутренних усилий, величины которых сведены в табл. 43 и 44 для рассматриваемых сечений колонны К-2 и панели П-1.
Таблица 37
Значения направляющих косинусов векторов сейсмического воздействия
Таблица 38
Значения коэффициентов динамичности отдельных форм колебаний β(i)j
Таблица 39
Таблица отношений коэффициентов β(i)j / β(1)j
|
i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
2 |
-0,1364 |
6,5212 |
-1,2195 |
0,7543 |
0,4222 |
1,0263 |
1,2726 |
0,7976 |
0,4512 |
|
3 |
0,4132 |
3,1384 |
1,5551 |
1,2567 |
0,1284 |
1,0585 |
11,2323 |
3,6519 |
-0,8950 |
|
4 |
-0,3131 |
-2,7424 |
0,1946 |
2,1641 |
-0,2992 |
0,462 |
12,9532 |
24,265 |
-1,3166 |
|
5 |
0,8497 |
-2,0798 |
1,1907 |
0,4681 |
1,1532 |
0,0117 |
0,479 |
3,1383 |
1,2041 |
|
6 |
-0,5383 |
-4,9596 |
-1,0596 |
-1,2153 |
-0,1265 |
1,1667 |
-8,8452 |
-2,6932 |
0,7515 |
|
7 |
0,3424 |
-0,911 |
-0,8471 |
-1,8639 |
0,6442 |
0,3421 |
15,2774 |
-5,1039 |
1,3535 |
|
8 |
0,2896 |
-0,3323 |
-0,7726 |
-1,8118 |
0,5697 |
0,2748 |
14,8693 |
-5,2485 |
1,6731 |
|
9 |
0,6939 |
-0,8435 |
-0,8312 |
-1,8661 |
0,6268 |
0,3246 |
15,2597 |
-5,1612 |
1,9882 |
|
10 |
0,5003 |
-1,4879 |
-0,0923 |
-0,23 |
0,8057 |
0,1462 |
-4,5742 |
-1,6214 |
1,0888 |
|
11 |
-0,3146 |
-3,4444 |
0,278 |
0,407 |
-0,0659 |
0,845 |
0,0048 |
0,0092 |
-0,0044 |
|
12 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
13 |
0,2903 |
3,1515 |
0,0258 |
0,0267 |
0,0208 |
-0,269 |
-0,0581 |
-0,0039 |
0,003 |
|
14 |
0,2151 |
-0,6333 |
-0,1321 |
-0,5211 |
0,2424 |
0,0994 |
3,1339 |
-0,0723 |
0,1908 |
|
15 |
0,2443 |
-1,1475 |
0,7229 |
1,5487 |
0,2445 |
-0,1754 |
10,2339 |
3,6257 |
-0,5695 |
Таблица 40
Значения сейсмических сил и моментов
|
№ ориентации i |
1 |
||||||||||
|
№ формы j |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
|
I |
1 |
S(j,i)1I |
1,2150 × 106 |
-1,2889 × 105 |
1,3111 × 105 |
3,0232 × 105 |
1,2523 × 106 |
4,4528 × 104 |
-8,0724 × 105 |
-2,6821 × 105 |
8,7015 × 104 |
|
2 |
S(j,i)2I |
-7,0128 × 105 |
-2,7488 × 105 |
7,1072 × 105 |
4,3855 × 105 |
-1,2616 × 105 |
7,7123 × 105 |
2,1000 |
-14,4955 |
-791,9431 |
|
|
3 |
M(j,i)3I |
1,3217 × 107 |
-1,3697 × 106 |
1,6444 × 106 |
3,9429 × 106 |
1,3323 × 107 |
3,6672 × 105 |
2,1589 × 106 |
6,0 × 106 |
-1,93 × 106 |
|
|
II |
1 |
S(j,i)1II |
3,0554 × 106 |
-3,1106 × 105 |
7,1343 × 104 |
5,9049 × 104 |
-5,5362 × 105 |
-2,6278 × 104 |
-1,9083 × 105 |
3,657 × 103 |
-1,5870 × 105 |
|
2 |
S(j,i)2II |
-1,6123 × 106 |
-6,0143 × 105 |
-3,9598 × 105 |
1,2687 × 105 |
6,1247 × 104 |
-6,2054 × 105 |
-5,756 × 103 |
2,472 × 103 |
1,001 × 103 |
|
|
3 |
M(j,i)3II |
3,1118 × 107 |
-3,1308 × 106 |
1,3572 × 106 |
2,6361 × 106 |
-7,3012 × 106 |
-6,3254 × 105 |
3,9939 × 106 |
-3,983 × 103 |
3,6281 × 106 |
|
|
III |
1 |
S(j,i)1III |
4,1144 × 105 |
-3,6920 × 104 |
6,967 × 103 |
-5,3498 × 105 |
1,7308 × 105 |
4,0856 × 104 |
-6,3472 × 104 |
8,7663 × 104 |
8,3762 × 104 |
|
2 |
S(j,i)2III |
-4,1113 × 104 |
-2,2738 × 105 |
5,233 × 103 |
-2,5825 × 105 |
-6,421 × 103 |
1,9392 × 105 |
5,918 × 103 |
-1,469 × 103 |
-4,61 × 102 |
|
|
3 |
M(j,i)3III |
1,7963 × 106 |
-1,5563 × 105 |
-1,1250 × 106 |
-2,0368 × 106 |
5,3299 × 105 |
9,5756 × 104 |
7,2809 × 105 |
-7,0246 × 105 |
-6,6582 × 105 |
|
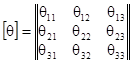

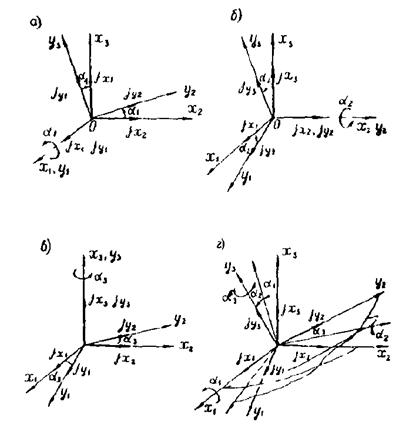
 - косинус угла между векторами jyi и jxk.
- косинус угла между векторами jyi и jxk.