ГОСТ Р МЭК 61094-2-2001
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственная система обеспечения единства измерений
МИКРОФОНЫ ИЗМЕРИТЕЛЬНЫЕ
Первичный метод градуировки по давлению лабораторных эталонных микрофонов методом взаимности
ГОССТАНДАРТ РОССИИ
Москва
Предисловие
1 РАЗРАБОТАН Всероссийским научно-исследовательским институтом физико-технических и радиотехнических измерений (ВНИИФТРИ), Техническим комитетом по стандартизации ТК 206 «Эталоны и поверочные схемы»
ВНЕСЕН Управлением метрологии Госстандарта России
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 1 августа 2001 г. № 311-ст
3 Настоящий стандарт представляет собой аутентичный текст международного стандарта МЭК 61094-2-95 «Микрофоны измерительные. Первичный метод градуировки по давлению лабораторных эталонных микрофонов методом взаимности»
4 ВВЕДЕН ВПЕРВЫЕ
СОДЕРЖАНИЕ
ГОСТ Р МЭК 61094-2-2001
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Государственная система обеспечения единства измерений МИКРОФОНЫ ИЗМЕРИТЕЛЬНЫЕ Первичный метод градуировки по давлению лабораторных эталонных микрофонов методом взаимности State system for ensuring the uniformity of measurements. Measurement microphones. Primary method for pressure calibration of laboratory standard microphones by the reciprocity technique |
Дата введения 2002-07-01
1 Область применения
Настоящий стандарт:
- распространяется на лабораторные эталонные микрофоны (далее - микрофоны), удовлетворяющие требованиям МЭК 61094-1, и на другие конденсаторные микрофоны, имеющие такие же размеры;
- устанавливает первичный метод определения чувствительности микрофонов по давлению, позволяющий получить воспроизводимость и необходимую точность при измерении звукового давления.
2 Нормативные ссылки
Следующие нормативные документы содержат положения, на которые имеются ссылки в настоящем стандарте и которые входят в состав этого стандарта. Поскольку все нормативные документы периодически пересматриваются, рекомендуется применять последние издания нормативных документов, указанных ниже.
Перечни действующих международных стандартов имеются в соответствующих национальных организациях МЭК и ИСО.
МЭК 27-721) Обозначения в электротехнике. Часть 2: Телекоммуникация и электроника
МЭК 61094-1-951) Микрофоны измерительные. Часть 1: Микрофоны лабораторные эталонные. Технические требования
_____________
1) Стандарты МЭК - во ВНИИКИ Госстандарта России.
3 Определения
Определения - по МЭК 27 и МЭК 61094-1 и дополнительные термины со следующими определениями:
обратимый микрофон: Линейный пассивный микрофон, для которого импеданс холостого хода в обратном направлении и передаточный импеданс в прямом направлении равны по значению.
фазовая чувствительность микрофона по давлению: Фазовый угол на данной частоте между напряжением холостого хода и равномерно распределенным звуковым давлением, действующим на мембрану, градус или радиан ( ... ° или рад).
электрический передаточный импеданс: Для системы, состоящей из двух акустически связанных микрофонов, - это отношение напряжения холостого хода микрофона-приемника к входному току микрофона-излучателя, ом (Ом).
Примечание - Этот импеданс определяют для конструкции с заземленным экраном, приведенной в 7.2 МЭК 61094-1.
акустический передаточный импеданс: Для системы, состоящей из двух акустически связанных микрофонов, - это отношение звукового давления, действующего на мембрану микрофона-приемника, к объемной скорости, производимой микрофоном-излучателем, в режиме короткого замыкания (т.е. при ненагруженной мембране), паскаль-секунда на кубический метр (Па×с/м3).
камера связи: Устройство, в котором при установленных микрофонах образуется полость определенной формы и размеров и которое служит как элемент акустической связи между микрофонами.
4 Опорные внешние условия
Температура tr = 23,0 °С.
Статическое давление рsr = 101325 Па.
Относительная влажность Hr = 50 %.
Примечание - Опорное значение температуры 23,0 °С выбрано из практических соображений, требующих проведения градуировки преимущественно при данной или близкой по значению температуре.
5 Принципы градуировки по давлению методом взаимности
5.1 Общие сведения
Градуировка микрофонов методом взаимности может быть выполнена либо с помощью трех микрофонов, два из которых должны быть обратимыми, либо с помощью вспомогательного источника звука и двух микрофонов, один из которых должен быть обратимым.
Примечание - Если один из микрофонов необратим, то он может быть использован только в качестве приемника звука.
Во-первых, предполагают, что два микрофона акустически соединены между собой с помощью камеры связи. Определяют произведение значений чувствительности по давлению этих микрофонов (5.1.1). Во-вторых, предполагают, что на оба микрофона воздействует одинаковое звуковое давление от вспомогательного источника звука. Тогда отношение двух выходных напряжений будет равно отношению чувствительностей по давлению этих микрофонов. Таким образом, из произведения и отношения чувствительностей по давлению этих двух микрофонов можно определить чувствительность по давлению каждого из двух микрофонов.
Примечание - Чтобы получить отношение чувствительностей по давлению, можно использовать метод непосредственного сравнения, а вспомогательным источником звука может быть третий микрофон, механические и акустические характеристики которого отличаются от характеристик градуируемых микрофонов.
Лабораторные эталонные и подобные им микрофоны можно рассматривать как обратимые, и поэтому систему из двух уравнений для этих микрофонов можно записать в виде
z11i + z12q = U, (1)
z21i + z22q = p,
где p - звуковое давление, равномерно распределенное по мембране микрофона;
U - напряжение на электрических контактах микрофона;
q - объемная скорость акустической части (мембраны) микрофона;
i - сила тока, протекающего через электрические контакты микрофона;
z11 = Ze - электрический импеданс микрофона при заторможенной мембране;
z22 = Za - акустический импеданс микрофона при ненагруженных электрических контактах;
z12 = z21 = МрZa - передаточный импеданс в обратном и прямом направлениях; Мр - чувствительность микрофона по давлению.
Уравнения (1) можно переписать в виде
Zei + MpZaq = U; (1a)
MpZai + Zaq = p,
которые и являются уравнениями взаимности для микрофона.
Предполагают, что микрофоны (1) и (2), имеющие чувствительности по давлению Мр,1 и Мр,2, акустически соединены с помощью камеры связи. Из уравнений (1а) видно, что ток i, протекающий через электрические контакты микрофона (1), вызовет объемную скорость при коротком замыкании (p = 0 на мембране) Мр,1i1 и создаст звуковое давление p2 = Zа,12Мр,1i1 на акустическом входе микрофона (2), где Zа,12 является акустическим передаточным импедансом системы.
Напряжение холостого хода на микрофоне (2) при этом будет
U2 = Мр,2p2 = Мр,1Мр,2Zа,12i1.
Следовательно, произведение чувствительностей по давлению будет
Мр,1Мр,2 = (1/Zа,12)(U2/i1). (2)
5.3 Метод замещения напряжения
Метод замещения напряжения применяют для определения напряжения холостого хода электрически нагруженного микрофона.
Предполагают, что к микрофону с определенным напряжением холостого хода и внутренним импедансом подключен импеданс нагрузки. Для измерения напряжения холостого хода к микрофону последовательно подключают малый (по сравнению с импедансом нагрузки) импеданс, через который подают с генератора калибровочное напряжение известного значения.
Предполагают, что звуковое давление и калибровочное напряжение той же частоты подают попеременно. Калибровочное напряжение регулируют до тех пор, пока оно не даст такое же падение напряжения на импедансе нагрузки, что и при воздействии звукового давления на микрофон. В этом случае напряжение холостого хода будет равно по значению калибровочному напряжению.
5.4 Определение акустического передаточного импеданса
Акустический передаточный импеданс Zа,12 = p2/(Мр,1i1) можно определить из эквивалентной схемы рисунка 1, где Zа,1 и Zа,2 - акустические импедансы микрофонов (1) и (2) соответственно.
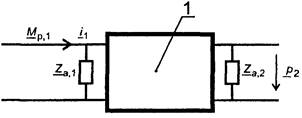
1 - камера связи
Рисунок 1 - Эквивалентная схема для определения акустического передаточного импеданса Zа,12
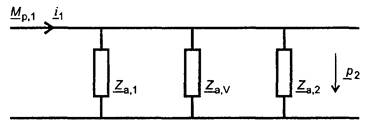
Рисунок 2 - Эквивалентная схема для определения Z¢а,12, когда размеры камеры связи малы по сравнению с длиной волны
В некоторых случаях Zа,12 можно определить теоретически. Предполагают, что звуковое давление будет одинаковым в любой точке внутри камеры связи (это будет соблюдено, если физические размеры камеры связи малы по сравнению с длиной волны). Только в этом случае газ, заключенный в камере связи, характеризуется как чистая гибкость, и из эквивалентной схемы рисунка 2 (в предположении адиабатического характера сжатия и расширения газа) Zа,12 выражается через Z¢а,12:
 , (3)
, (3)
где V - общий геометрический объем камеры связи, м3;
Ve,1 - эквивалентный объем микрофона (1), м3;
Ve,2 - эквивалентный объем микрофона (2), м3;
Za,v = крs/(jwV) - акустический импеданс газа, заключенного в камере связи, Па×с/м3;
w - угловая частота, рад/с;
ps - статическое давление, Па;
к - отношение удельных теплоемкостей при условиях измерения;
кr равно к при опорных внешних условиях;
j = [-12].
Значения для к и кr можно определить из уравнений, приведенных в приложении Е.
На более высоких частотах, при которых размеры камеры связи недостаточно малы по сравнению с длиной волны, определение Za,12 становится более сложным. Однако если форма камеры цилиндрическая и ее диаметр такой же, как у мембран микрофонов, то на частотах, где предполагается распространение плоских волн, всю систему можно рассматривать как однородную линию передачи (см. рисунок 3); в этом случае Za,12 выражается через Z¢a,12 (в предположении адиабатического характера сжатия и расширения газа):
 , (4)
, (4)
где Zа,0 = rc/So;
r - плотность газа, заключенного в камере связи, кг/м3;
с - скорость звука, свободно распространяющегося в газе, м/с;
So - поперечное сечение камеры связи, м2;
lo - длина камеры связи, т.е. расстояние между двумя мембранами, м;
у = a + jb - комплексный коэффициент распространения, м-.
При использовании уравнения (4) у можно упростить, положив a равной нулю и b равной w/с. Необходимо учесть любой воздушный объем, связанный с микрофонами, даже находящийся вне цилиндра, образованного камерой связи и обеими мембранами (см. 7.3.3).
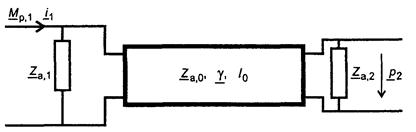
Рисунок 3 - Эквивалентная схема для определения Z¢a,12, когда в камере связи предполагается распространение плоской волны
5.5 Поправка на теплопроводность
При определении Z¢a,12 в 5.4 предположены адиабатические условия в камере связи. Однако в действительности влияние теплопроводности стенок камеры связи вызывает отклонение от чисто адиабатических условий, особенно для небольших камер связи и низких частот. Только для камеры простой формы в предположении, что стенки камеры остаются при постоянной температуре, можно рассчитать потери на теплопроводность и выразить их в виде комплексного поправочного коэффициента Dн к геометрическому объему V уравнении (3) или к площади поперечного сечения Sо в уравнении (4).
Расчет поправочного коэффициента Dн приведен в приложении А.
5.6 Поправка на капиллярность трубки
Обычно в камере связи монтируют капиллярные трубки для выравнивания статического давления внутри и снаружи камеры. Две такие капиллярные трубки позволяют ввести в камеру связи другой газ вместо воздуха.
Акустический импеданс на входе открытой капиллярной трубки Za,c определяют по формуле
Za,c = Za,t tg(glc), (5)
где Za,t - комплексный акустический волновой импеданс бесконечной трубки, Па×с/м3;
lc - длина трубки, м.
Шунтирующее действие капиллярных трубок учитывают вводя комплексный поправочный коэффициент Dс к акустическим передаточным импедансам, определенным по формулам (3) и (4):
 , (6)
, (6)
где п - число одинаковых капиллярных трубок;
Z¢¢а,12 - акустический передаточный импеданс Z¢a,12 с поправкой на теплопроводность согласно 5.5.
Значения реальной и мнимой частей акустического импеданса на входе Za,c для открытой капиллярной трубки приведены в приложении Б.
5.7 Окончательные уравнения для чувствительности по давлению
5.7.1 Метод с использованием трех микрофонов
Обозначают электрический передаточный импеданс U2/i1 через Zе,12 и вводят аналогичные обозначения для оставшейся пары микрофонов.
Приняв во внимание поправки, указанные в 5.5 и 5.6, получают окончательное уравнение для модуля чувствительности микрофона (1) по давлению:
 . (7)
. (7)
Аналогичные уравнения справедливы и для микрофонов (2) и (3).
Подобным образом определяют и фазовую чувствительность микрофонов через фазовый угол каждого члена уравнения (7).
5.7.2 Метод с использованием двух микрофонов и вспомогательного источника звука
Если используют только два микрофона и вспомогательный источник звука, то окончательное уравнение для модуля чувствительности по давлению будет иметь вид
 , (8)
, (8)
где отношение двух чувствительностей по давлению измеряют путем сравнения при размещении напротив дополнительного источника (см. 5.1.2).
6 Факторы, влияющие на чувствительность по давлению
6.1 Общие сведения
Чувствительность конденсаторного микрофона по давлению зависит от напряжения поляризации и от внешних условий. Более того, при определении чувствительности предполагают, что при измерениях должны быть выполнены некоторые требования: достаточно хороший контроль внешних условий при градуировке с тем, чтобы получить достаточно малые составляющие общей неопределенности.
6.2 Напряжение поляризации
Чувствительность конденсаторного микрофона приблизительно пропорциональна напряжению поляризации, и поэтому в протоколе градуировки должно быть указано действительное значение поляризации. Рекомендованное МЭК 61094-1 напряжение поляризации равно 200,0 В.
6.3 Стандартная конфигурация заземленного экрана
В соответствии с 3.3 МЭК 61094-1 напряжение холостого хода должно быть измерено на электрических контактах микрофона методом замещения напряжения, описанным в 5.3, при подключении к стандартной конструкции заземленного экрана. Требования к конфигурации заземленного экрана для лабораторных эталонных микрофонов указаны в МЭК 61094-1.
Аналогичная конструкция заземленного экрана должна быть использована при градуировке как для микрофона-приемника, так и для микрофона-излучателя, а экран должен быть подключен к нулевому потенциалу.
При использовании другой конструкции результаты градуировки должны быть приведены к стандартной конструкции заземленного экрана.
Если изготовитель указывает максимальное механическое усилие, которое можно прилагать к центральному электрическому контакту микрофона, тот этот предел нельзя превышать.
6.4 Распределение давления по мембране
При определении чувствительности по давлению предполагают, что звуковое давление равномерно распределено по мембране. Выходное напряжение микрофона при неравномерном распределении давления по поверхности мембраны будет отличаться от выходного напряжения микрофона при равномерном распределении давления, имеющем то же самое среднее значение, поскольку обычно микрофон более чувствителен к звуковому давлению в центре мембраны.
В цилиндрических камерах связи, описанных в приложении В, волновое движение будет как продольным, так и радиальным. Радиальное волновое движение будет причиной неравномерного распределения давления по мембране. Оно возникнет, если излучатель будет отличаться от идеального поршневого источника, плотно соприкасающегося с поверхностью камеры связи, или если геометрическая форма соединения микрофон-камера связи не является прямым круговым цилиндром.
Рекомендуется, чтобы при градуировке неравномерность распределения звукового давления по мембране не превышала ±0,1 дБ. Однако это условие трудно контролировать из-за геометрического несовершенства реального микрофона. Хотя радиального волнового движения невозможно избежать из-за отличия распределения по скорости микрофона-излучателя от идеального поршня, все же камеры связи, диаметр которых равен диаметру мембраны микрофона, будут меньше всего подвержены радиальному волновому движению и менее всего чувствительны к несовершенству геометрической формы полости, чем камеры связи с диаметром, большим диаметра мембраны.
Однако если необходима высокая точность при градуировке на высоких частотах, то для получения более правильной чувствительности микрофона желательно использовать несколько камер связи различных размеров.
6.5 Зависимость от внешних условий
6.5.1 Статическое давление
Акустическое сопротивление и масса газа между мембраной и неподвижным электродом, податливость полости за мембраной и, следовательно, чувствительность по давлению зависят от статического давления. Эта зависимость является функцией от частоты. Ее можно определить для микрофона путем градуировки методом взаимности при различных статических давлениях.
Приложение Г содержит информацию о влиянии статического давления на чувствительность по давлению лабораторных эталонных конденсаторных микрофонов.
6.5.2 Температура микрофона
Любой лабораторный эталонный микрофон будет чувствителен к температуре. Эта зависимость является функцией частоты.
Приложение Г содержит информацию о влиянии температуры на чувствительность по давлению лабораторных эталонных конденсаторных микрофонов.
Примечание - Если микрофон подвергнуть большим изменениям температуры, то это может привести к изменению его чувствительности.
6.5.3 Влажность
Хотя термодинамическое состояние воздуха в полости за мембраной микрофона слегка зависит от влажности, но ее влияние на чувствительность лабораторных эталонных микрофонов в отсутствие конденсации не прослеживается.
Примечание - Поверхностное сопротивление изоляции материала между неподвижным электродом и корпусом микрофона может ухудшиться под влиянием большой влажности, особенно если материал загрязнен (7.4). Поверхностное сопротивление имеет заметное влияние на чувствительность микрофона на низких частотах, особенно на фазовую чувствительность.
6.5.4 Атмосферные условия
В протоколе градуировки микрофонов чувствительность по давлению должна быть приведена к опорным внешним условиям, если имеются достоверные поправочные данные.
Условия, при которых проводили градуировку, должны быть внесены в протокол.
Примечание - При градуировке температура микрофона может отличаться от температуры окружающего воздуха.
7 Составляющие неопределенности градуировки
7.1 Общие сведения
В дополнение к факторам, влияющим на чувствительность по давлению и упомянутым в разделе 6, ниже указаны составляющие общей неопределенности, такие как погрешность метода, инструментальная погрешность и тщательность проведения градуировки. Факторы, известным образом влияющие на результаты градуировки, должны быть измерены или рассчитаны с максимально возможной точностью для того, чтобы уменьшить их влияние на общую неопределенность.
7.2 Электрический передаточный импеданс
Для измерения электрического передаточного импеданса с необходимой точностью имеются различные методы, но ни одному из них нельзя отдать предпочтение. Напряжение питания, используемое для микрофона-излучателя, должно быть таким, чтобы влияние гармоник на неопределенность в измерении чувствительности по давлению было мало по сравнению со случайной неопределенностью измерений. Шумы или другие помехи (такие как перекрестные помехи) акустического или другого происхождения не должны чрезмерно влиять на чувствительность по давлению. Для улучшения отношения сигнал/шум можно использовать полосовые фильтры.
7.3 Акустический передаточный импеданс
7.3.1 Общие сведения
На акустический передаточный импеданс влияют много факторов, но основным источником неопределенности при его измерении, особенно для маленьких камер связи, являются параметры микрофона.
Форма и размеры полости собранной камеры связи должны удовлетворять требованиям 6.4. Пока наибольшие размеры камеры связи малы по сравнению с длиной звуковой волны в газе, звуковое давление будет достаточно однородным в камере и не будет зависеть от ее формы. На высоких частотах и для больших камер связи это требование может быть удовлетворено при заполнении полости гелием или водородом.
Примеры применяемых камер связи даны в приложении В.
Примечания
1 Цилиндрические камеры связи, используемые в диапазоне частот, где размеры камеры не малы по сравнению с длиной волны, должны быть изготовлены с особой тщательностью, чтобы предотвратить возбуждение асимметричных звуковых полей.
2 Влияние асимметричного распределения звукового поля на микрофон можно обнаружить изменяя взаимное положение камеры связи и микрофонов, например поворачивая каждый микрофон вокруг своей оси ступенями на некоторый угол. Если при этом электрический передаточный импеданс изменяется, то это влияние следует принять во внимание при оценке неопределенности.
3 Если камера связи заполнена не воздухом, а другим газом, то необходимо предотвратить утечку этого газа в полость за мембраной путем герметизации контактирующих поверхностей тонким слоем вакуумной смазки. При диффузии газа через мембрану градуировка микрофона данным способом невозможна, так как чувствительность микрофона становится непредсказуемой.
Лабораторные эталонные микрофоны перед мембраной имеют углубление. Объем этой передней полости является частью общего геометрического объема V камеры связи в уравнении (3). Глубины этих передних полостей также влияют на длину lo камеры связи в уравнении (4). Из-за допусков при изготовлении объем и глубину передней полости следует определять индивидуально для каждого микрофона перед его градуировкой в камерах связи плоской волны (приложение Д). Легко определить, что измеренный объем передней полости будет отличаться от объема, рассчитанного на основании поперечного сечения Sо камеры связи и глубины передней полости. Это связано с тем, что диаметр передней полости может немного отличаться от диаметра камеры связи, а передняя полость может иметь на внутренней стенке резьбу, которая не позволяет точно определить диаметр полости, и здесь же может быть дополнительное кольцеобразное воздушное пространство, образующее полость вблизи края мембраны микрофона. Если имеется хорошая герметизация между стенкой передней полости микрофона и мембраной, дополнительный объем полости, добавляемый к объему, рассчитанному исходя из поперечного сечения Sо камеры связи и глубины передней полости, мал и его можно прибавить к эквивалентному объему микрофона при использовании уравнения (4). Это можно сделать, поскольку Za,1 и Za,2 и импеданс дополнительного объема образуют параллельное соединение импедансов. Если дополнительный объем большой и, по всей вероятности, находится позади плоскости мембраны (например, когда микрофон временно используют с адаптером, чтобы удовлетворять требованиям МЭК 61094-1), то радиус камеры связи должен быть согласован с этим объемом.
Примечания
1 Дополнительный объем в некоторых случаях может быть отрицательным.
2 Точность, с которой должны быть измерены размеры полости, зависит от допустимого значения общей погрешности измерения объема используемой камеры связи и от частоты.
7.3.4 Акустический импеданс
Акустический импеданс микрофона зависит от частоты и определяется, в основном, натяжением мембраны, слоем воздуха, заключенным позади мембраны, и геометрией неподвижного электрода. В первом приближении акустический импеданс можно выразить, с точки зрения эквивалентной схемы, в виде последовательно соединенных податливости, массы и сопротивления. Альтернативно эту эквивалентную схему можно описать через податливость, частоту резонанса и через коэффициент потерь. Податливость нередко выражают в виде реальной части эквивалентного объема на низкой частоте (3.8.1 МЭК 61094-1).
Акустический импеданс Za каждого микрофона составляет основную часть акустического передаточного импеданса Za,12 системы и определяет погрешность при оценке влияния Za на точность градуировки в целом, и особенно на высоких частотах.
Методы определения акустического импеданса описаны в приложении Д.
Примечание - Точность, с которой должны быть измерены параметры микрофона, зависит от допустимого значения общей погрешности измерения объема используемой камеры связи и от частоты.
7.3.5 Физические величины
Основные физические величины, описывающие свойства газа, заключенного в камере связи, входят в уравнения для расчета чувствительности микрофонов. Эти величины зависят от внешних условий, таких как статическое давление, температура и влажность. Значения этих величин и их зависимость от внешних условий указаны в приложении Е.
7.3.6 Внешние условия
Акустический передаточный импеданс так же, как и чувствительность микрофона, зависит от внешних условий, таких как статическое давление и температура.
7.3.7 Поправочные коэффициенты
Поправочные коэффициенты на потери из-за теплопроводности и капиллярных трубок рассчитывают из уравнений, указанных в приложениях А и Б.
При определении напряжения поляризации необходимо принять меры для его измерения непосредственно на контактах микрофона. Это особенно важно, если напряжение поляризации подается от высокоимпедансного источника, поскольку микрофон имеет конечное сопротивление изоляции. С другой стороны, имеются обоснованные способы измерения напряжения поляризации в удалении от микрофона на низкоомном выходе источника напряжения, если достоверно известно, что сопротивление изоляции микрофона достаточно высоко.
7.5 Неопределенность уровня чувствительности по давлению
Определение уровня чувствительности по давлению при градуировке методом взаимности при контролируемых условиях оценивают с неопределенностью приблизительно в 0,05 дБ на низких и средних частотах. Неопределенность повышается от 0,1 дБ на частотах 10 кГц и 20 кГц для лабораторных эталонных микрофонов типов LS1P и LS2P соответственно.
ПРИЛОЖЕНИЕ
А
(обязательное)
Теплопроводность в замкнутой полости
В замкнутой полости камеры связи теплопроводность между воздухом и стенками вызывает постепенный переход от адиабатических условий к изотермическим. Характеристика этого перехода зависит от частоты градуировки и от размеров камеры. Соответственно будет изменяться и звуковое давление, создаваемое микрофоном-излучателем, т.е. будет изменяться постоянное объемное смещение источника. Это изменение можно рассматривать как увеличение объема камеры связи, введя комплексный поправочный коэффициент Dн к геометрическому объему V в уравнении (3) или к площади поперечного сечения So в уравнении (4).
Поправочный коэффициент рассчитывают по формуле
![]() , (А.1)
, (А.1)
где Еv - комплексная функция преобразования температуры, определяемая в виде отношения усредненного по пространству синусоидального изменения температуры, вызванного звуковым давлением, к синусоидальному изменению, которое было бы выделено, если бы стенки камеры связи были бы совершенно непроводящими. В работе [1] значения Еv табулированы и даны в зависимости от параметров R и X, где R - отношение длины к диаметру камеры связи; Х = fl2/(кat); f - частота, Гц; l - отношение объема камеры связи к ее поверхности, м; at - коэффициент температуропроводности газа, м2/с.
В таблице А.1 даны значения Еv для нескольких R и Х с погрешностью до 0,00001. Для цилиндрических камер связи, описанных в приложении В, приводимая ниже аппроксимация для комплексной величины Еv дает удовлетворительные результаты.
![]() , (A.2)
, (A.2)
где
![]() ,
, ![]() ,
, ![]() .
.
Модули, рассчитанные по формуле (А.2), имеют погрешность в 0,01 % для 0,125 < R < 8 и для Х > 5. Первые два члена уравнения (А.2) могут быть использованы для камер связи, отличающихся по форме от правильного цилиндра.
Таблица А.1 - Значения Еv
|
X |
Мнимая часть Еv |
|||||
|
R = 0,2 |
R = 0,5 |
R = 1 |
R = 0,2 |
R = 0,5 |
R = 1 |
|
|
0,72127 |
0,71996 |
0,72003 |
1,0 |
0,24038 |
0,22323 |
0,22146 |
|
0,80092 |
0,80122 |
0,80128 |
2,0 |
0,17722 |
0,16986 |
0,16885 |
|
0,83727 |
0,83751 |
0,83754 |
3,0 |
0,14818 |
0,14304 |
0,14236 |
|
0,85907 |
0,85920 |
0,85922 |
4,0 |
0,13003 |
0,12614 |
0,12563 |
|
0,87393 |
0,87402 |
0,87403 |
5,0 |
0,11732 |
0,11421 |
0,11380 |
|
0,89343 |
0,89348 |
0,89349 |
7,0 |
0,10030 |
0,09807 |
0,09777 |
|
0,91082 |
0,91086 |
0,91086 |
10,0 |
0,08477 |
0,08321 |
0,08300 |
|
0,93693 |
0,93694 |
0,93694 |
20,0 |
0,06086 |
0,06007 |
0,05997 |
|
0,94850 |
0,94851 |
0,94851 |
30,0 |
0,05002 |
0,04950 |
0,04942 |
|
0,95540 |
0,95541 |
0,95541 |
40,0 |
0,04349 |
0,04310 |
0,04304 |
|
0,96358 |
0,96359 |
0,96359 |
60,0 |
0,03568 |
0,03541 |
0,03538 |
|
0,96846 |
0,96846 |
0,96846 |
80,0 |
0,03098 |
0,03078 |
0,03076 |
|
0,97179 |
0,97179 |
0,97179 |
100,0 |
0,02776 |
0,02761 |
0,02758 |
|
0,98005 |
0,98005 |
0,98005 |
200,0 |
0,01972 |
0,01964 |
0,01963 |
|
0,98590 |
0,98590 |
0,98590 |
400,0 |
0,01399 |
0,01395 |
0,01395 |
|
0,99003 |
0,99003 |
0,99003 |
800,0 |
0,00992 |
0,00990 |
0,00989 |
ПРИЛОЖЕНИЕ Б
(обязательное)
Акустический импеданс капиллярной трубки
Акустический импеданс Za,с на входе открытой капиллярной трубки определяется, исходя из теории длинных линий (5.6), уравнением
Za,с = Za,ttg(glc). (Б.1)
Между Za,t и g имеется соотношение
 (Б.2)
(Б.2)
 , (Б.3)
, (Б.3)
где Jo(ka), Jо(Bka), J1(ka), J1(Bka) - цилиндрические функции Бесселя первого рода нулевого и первого порядков от комплексного переменного;
а - радиус трубки, м;
k = (-jw r/h)1/2 - комплексное волновое число, м-1;
B = (h/rat)1/2;
h - вязкость газа, Па×с;
r - плотность газа, кг/м3;
at - температуропроводность газа, м2/с.
Уравнения (Б.1), (Б.2), (Б.3) следует использовать для расчета поправочного коэффициента Dс по формуле (6).
В альтернативном случае капиллярная трубка может быть заглушена по всей длине подходящей по размеру проволочкой после установки в камеру связи микрофонов. В этом случае поправочный коэффициент равен 1.
Уравнения (Б.1), (Б.2), (Б.3) справедливы для идеальной цилиндрической трубки, зависят в 4-й степени от радиуса трубки. Однако в действительности форма внутренних частей трубки не соответствует форме кругового цилиндра и необходима градуировка трубки по потоку для того, чтобы определить ее эффективный радиус.
В таблицах Б.1 и Б.2 даны значения реальной и мнимой частей Za,с при опорных внешних условиях для обычно используемых размеров трубки и частоты соответственно; lс - длина капиллярной трубки.
Таблица Б.1 - Реальная часть Za,с, ГПа×с/м3
Размеры трубки в миллиметрах
|
lс = 50 |
Частота, Гц |
lс = 100 |
||||
|
а = 0,1667 |
а = 0,20 |
а = 0,25 |
a = 0,1667 |
a = 0,20 |
a = 0,25 |
|
|
3,018 |
1,457 |
0,597 |
20 |
6,041 |
2,916 |
1,195 |
|
3,019 |
1,457 |
0,597 |
25 |
6,044 |
2,919 |
1,196 |
|
3,020 |
1,458 |
0,597 |
31,5 |
6,049 |
2,922 |
1,198 |
|
3,022 |
1,459 |
0,598 |
40 |
6,059 |
2,928 |
1,201 |
|
3,025 |
1,460 |
0,599 |
50 |
6,072 |
2,937 |
1,205 |
|
3,029 |
1,463 |
0,600 |
63 |
6,094 |
2,951 |
1,212 |
|
3,036 |
1,467 |
0,602 |
80 |
6,130 |
2,975 |
1,225 |
|
3,047 |
1,473 |
0,605 |
100 |
6,185 |
3,011 |
1,243 |
|
3,063 |
1,482 |
0,610 |
125 |
6,270 |
3,069 |
1,272 |
|
3,093 |
1,499 |
0,620 |
160 |
6,422 |
3,173 |
1,326 |
|
3,137 |
1,524 |
0,633 |
200 |
6,643 |
3,331 |
1,408 |
|
3,207 |
1,564 |
0,654 |
250 |
6,989 |
3,595 |
1,550 |
|
3,326 |
1,631 |
0,689 |
315 |
7,542 |
4,066 |
1,817 |
|
3,534 |
1,750 |
0,750 |
400 |
8,353 |
4,944 |
2,381 |
|
3,871 |
1,943 |
0,849 |
500 |
9,068 |
6,288 |
3,535 |
|
4,504 |
2,314 |
1,034 |
630 |
8,670 |
7,336 |
5,631 |
|
5,807 |
3,113 |
1,435 |
800 |
6,375 |
5,311 |
4,375 |
|
8,332 |
4,890 |
2,378 |
1000 |
4,353 |
3,005 |
1,925 |
|
12,120 |
9,008 |
5,385 |
1250 |
3,545 |
2,127 |
1,146 |
|
9,191 |
7,926 |
6,740 |
1,600 |
4,171 |
2,410 |
1,196 |
|
4,326 |
3,021 |
1,951 |
2000 |
6,325 |
4,409 |
2,527 |
|
2,694 |
1,637 |
0,893 |
2500 |
4,979 |
3,717 |
2,768 |
|
2,807 |
1,580 |
0,783 |
3150 |
4,411 |
2,661 |
1,392 |
|
5,923 |
3,536 |
1,749 |
4000 |
5,238 |
4,019 |
3,075 |
|
5,946 |
4,825 |
3,903 |
5000 |
5,059 |
3,262 |
1,770 |
|
3,306 |
1,939 |
1,011 |
6300 |
4,578 |
2,920 |
1,672 |
|
6,571 |
5,375 |
4,137 |
8000 |
4,695 |
3,034 |
1,749 |
|
4,184 |
2,465 |
1,258 |
10000 |
4,977 |
3,363 |
1,952 |
|
3,902 |
2,539 |
1,540 |
12500 |
4,760 |
3,331 |
2,271 |
|
4,043 |
2,590 |
1,534 |
16000 |
4,753 |
3.263 |
2,137 |
|
4,535 |
2,813 |
1,517 |
20000 |
4,844 |
3,324 |
2,023 |
|
Примечания 1 Значения, использованные в этой таблице; с = 345,7 м/с; к = 1,40; r = 1,186 кг/м3; h = 18,3×10-6 Па×с; at = 21×10-6 м2/с. 2 Значения, данные в этой таблице, верны только при опорных внешних условиях. |
||||||
Таблица Б.2 - Мнимая часть Za,c, ГПа×с/м3
Размеры трубки в миллиметрах
|
lс = 50 |
Частота, Гц |
lс = 100 |
||||
|
а = 0,1667 |
а = 0,20 |
a = 0,25 |
a = 0,1667 |
а = 0,20 |
а = 0,25 |
|
|
0,097 |
0,074 |
0,049 |
20 |
0,096 |
0,114 |
0,090 |
|
0,122 |
0,092 |
0,061 |
25 |
0,120 |
0,143 |
0,112 |
|
0,153 |
0,116 |
0,077 |
31,5 |
0,151 |
0,180 |
0,141 |
|
0,195 |
0,147 |
0,098 |
40 |
0,191 |
0,228 |
0,180 |
|
0,244 |
0,184 |
0,123 |
50 |
0,238 |
0,285 |
0,225 |
|
0,307 |
0,232 |
0,155 |
63 |
0,299 |
0,359 |
0,283 |
|
0,390 |
0,295 |
0,197 |
80 |
0,376 |
0,455 |
0,360 |
|
0,488 |
0,369 |
0,246 |
100 |
0,465 |
0,569 |
0,452 |
|
0,610 |
0,461 |
0,308 |
125 |
0,569 |
0,710 |
0,567 |
|
0,782 |
0,592 |
0,396 |
160 |
0,701 |
0,905 |
0,731 |
|
0,980 |
0,743 |
0,496 |
200 |
0,824 |
1,123 |
0,923 |
|
1,228 |
0,933 |
0,623 |
250 |
0,916 |
1,380 |
1,170 |
|
1,556 |
1,186 |
0,792 |
315 |
0,888 |
1,664 |
1,500 |
|
1,990 |
1,527 |
1,021 |
400 |
0,479 |
1,842 |
1,922 |
|
2,511 |
1,948 |
1,306 |
500 |
-0,684 |
1,411 |
2,200 |
|
3,189 |
2,532 |
1,711 |
630 |
-2,739 |
-0,777 |
0,926 |
|
3,987 |
3,353 |
2,325 |
800 |
-3,890 |
-3,152 |
-2,510 |
|
4,280 |
4,213 |
3,186 |
1000 |
-3,031 |
-2,595 |
-2,130 |
|
1,338 |
3,162 |
3,730 |
1250 |
-1,382 |
-1,157 |
-0,944 |
|
-5,333 |
-4,384 |
-3,281 |
1600 |
0,429 |
0,456 |
0,282 |
|
-4,500 |
-3,768 |
-2,956 |
2000 |
0,260 |
0,971 |
1,221 |
|
-1,996 |
-1,663 |
-1,280 |
2500 |
-1,702 |
-1,552 |
-1,344 |
|
0,491 |
0,244 |
0,051 |
3150 |
0,205 |
0,199 |
0,053 |
|
2,428 |
2,283 |
1,692 |
4000 |
-1,074 |
-0,864 |
-0,524 |
|
-2,803 |
-2,434 |
-1,954 |
5000 |
0,208 |
0,438 |
0,406 |
|
0,186 |
-0,037 |
-0,190 |
6300 |
-0,070 |
-0,095 |
-0,219 |
|
-1,245 |
-0,607 |
0,209 |
8000 |
-0,041 |
-0,027 |
-0,138 |
|
0,872 |
0,643 |
0,336 |
10000 |
-0,056 |
0,152 |
0,212 |
|
-0,542 |
-0,699 |
-0,764 |
12500 |
-0,281 |
-0,295 |
-0,281 |
|
-0,210 |
-0,399 |
-0,532 |
16000 |
-0,174 |
-0,187 |
-0,228 |
|
0,430 |
0,349 |
0,142 |
20000 |
-0,109 |
-0,001 |
0,035 |
|
Примечания 1 Значения, использованные в этой таблице: с = 345,7 м/с; к = 1,40; r = 1,186 кг/м3; h = 18,3×-10-6 Па×с; at = 21×10-6 м2/с. 2 Значения, данные в этой таблице, верны только при опорных внешних условиях. |
||||||
ПРИЛОЖЕНИЕ
В
(справочное)
Цилиндрические камеры связи, применяемые для градуировки микрофонов
В камере связи, применяемой для градуировки методом взаимности, распределение звукового давления на мембране как микрофона-излучателя, так и микрофона-приемника должно быть равномерным. Особенно важно обеспечить равномерное распределение давления на мембране микрофона-приемника для того, чтобы получить чувствительность микрофона в соответствии с определением чувствительности по давлению (3.4 МЭК 61094-1). Из-за радиального волнового движения и асимметричности движения мембраны это идеальное условие можно выполнить лишь приближенно. Для увеличения частотного диапазона камеры связи (это относится только к радиальному волновому движению) необходимо, чтобы радиальная резонансная частота была наиболее высокой, что возможно при уменьшении диаметра камеры связи. Практически диаметр камеры связи не должен быть меньше диаметра микрофона. Однако для имеющейся камеры связи можно повысить частоту резонанса, введя взамен воздуха внутрь камеры водород или гелий (7.3.2). Теоретически это увеличение верхней граничной частоты камеры связи определяется коэффициентом, равным отношению скорости звука в водороде (гелии) к скорости звука в воздухе. Кроме того, необходимо заметить, что волновая скорость мембраны микрофона почти не зависит от газа в камере связи и не увеличится во столько же раз, как скорость звука заключенного в камере связи газа.
Большое значение при градуировке методом взаимности в замкнутой камере связи имеет акустический передаточный импеданс Za,12 всей системы (5.2 и 5.4), который должен быть известен с высокой точностью. На частотах, где длина звуковой волны много больше размеров камеры связи, звуковое давление равномерно распределяется во всей камере и Za,12 = Z¢a,12 определяется эффективным объемом камеры связи, т.е. геометрическим объемом камеры, включая объем передней полости (далее - передний объем) и эквивалентный объем микрофонов (3). На частотах, где длина звуковой волны много меньше по сравнению с размерами камеры, будет существовать волновое движение и трудно получить теоретическое выражение простой формы для передаточного импеданса камеры связи. Уравнение (4) выражает передаточный импеданс Z¢a,12 цилиндрической камеры связи с диаметром, равным диаметрам мембран микрофонов.
Для других случаев необходимо разработать методы расчета передаточного импеданса. Для них, однако, поправка на волновое движение должна быть определена эмпирически. Практически используют два типа камер связи. Это плосковолновые камеры связи, диаметр которых равен диаметру мембран, и камеры большого объема, объем которых велик по сравнению с передними и эквивалентными объемами микрофонов.
B.1 Плосковолновые камеры связи
Плосковолновые камеры связи имеют диаметр полости, равный диаметру передней полости микрофона. Длина камеры связи, т.е. расстояние между двумя мембранами, должна быть достаточно большой, чтобы обеспечить плосковолновую передачу, но не такой большой, чтобы вводить поправки на высокочастотные затухания. Рекомендуется использовать камеры связи, имеющие отношение длины к диаметру от 0,5 до 0,75. В таких камерах связи разрешается проводить в воздухе градуировку лабораторных эталонных микрофонов типа LS1P до 10 кГц и типа LS2P до 20 кГц.
Уравнение (4) должно быть использовано для расчета Z¢a,12, и при этом необходимо определить все факторы, влияющие на Za,12, и особенно, с наибольшей точностью, на акустический импеданс микрофонов. Рекомендуемые размеры для плосковолновых камер связи даны в таблице B.1 и показаны на рисунке B.1.
Таблица B.1 - Номинальные размеры плосковолновых камер связи
В миллиметрах
|
Лабораторные эталонные микрофоны типов |
|||
|
LSP1 |
LS2aP |
LS2bP |
|
|
ÆА |
23,77 |
13,2 |
12,15 |
|
ÆВ |
18,6 |
9,3 |
9,8 |
|
ÆС |
18,6 |
9,3 |
9,8 |
|
D |
1,95 |
0,5 |
0,7 |
|
Е |
6,5-8,5 |
3,5-6 |
3,5-6 |
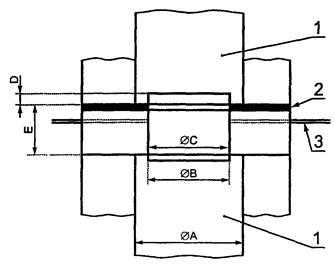
1 - микрофон; 2 - изолятор; 3 - капиллярные трубки
Рисунок B.1 - Эскиз плосковолновой камеры связи
В.2 Камеры связи большого объема
Объем камеры связи большого объема больше объема плосковолновых камер связи, и их размеры выбраны так, чтобы уменьшение давления на мембране из-за радиальных мод частично компенсировалось увеличением давления из-за продольной моды. Оптимальное отношение длины к диаметру, зависящее от глубины передних полостей микрофонов, - 0,3.
Такие камеры связи разрешается использовать в воздухе для градуировки лабораторных эталонных микрофонов типа LS1P вплоть до 2,5 кГц и типа LS2P до 5 кГц при введении эмпирических поправок на волновое движение. Если необходима высокая точность, рекомендуется определять поправку на волновое движение для каждой индивидуально изготовленной камеры связи, поскольку волновая картина в камере очень сильно зависит от ее размеров. Для расчета Z¢a,12 должно быть использовано уравнение (3) и только для него необходима сумма переднего объема полости и эквивалентного объема микрофона. Рекомендуемые размеры камер связи большого объема даны в таблице В.2 и показаны на рисунке В.2.
Таблица В.2 - Номинальные размеры и допуски для камер связи большого объема
В миллиметрах
|
Лабораторные эталонные микрофоны типов |
|||
|
LSP1 |
LS2aP |
LS2bP |
|
|
ÆА |
23,77 |
13,2 |
12,15 |
|
ÆВ |
18,6 |
9,3 |
9,8 |
|
ÆС |
42,88 ± 0,03 |
18,3 ± 0,03 |
18,3 ± 0,03 |
|
D |
1,95 |
0,5 |
0,7 |
|
Е |
12,55 ± 0,03 |
3,5 ± 0,03 |
3,5 ± 0,03 |
|
F |
0,8 ± 0,03 |
0,4 ± 0,03 |
0,4 ± 0,03 |

1 - микрофон; 2 - изолятор; 3 - капиллярные трубки
Рисунок В.2 - Эскиз камеры связи большого объема
В таблице В.3 указаны типовые поправки на волновое движение для камеры связи большого объема, используемой совместно с микрофоном типа LS1Р. Эти поправки должны быть прибавлены к уровню чувствительности по давлению, определенному для камеры связи, наполненной воздухом, или могут быть введены тогда, когда практические поправки для индивидуальной камеры с микрофонами не определяли. Эти же поправки можно использовать и при заполнении камеры водородом, если частотную шкалу умножить на коэффициент, равный отношению скорости звука в имеющейся концентрации водорода к соответствующей скорости в воздухе.
Таблица В.3 - Поправки на волновое движение в воздухе, определенные экспериментально для камеры связи большого объема, применяемой с микрофонами типа LS1P
|
Поправка, дБ |
Частота, Гц |
Поправка, дБ |
|
|
800 и ниже |
0,000 |
1600 |
-0,034 |
|
1000 |
-0,002 |
2000 |
-0,060 |
|
1250 |
-0,013 |
2500 |
-0,087 |
ПРИЛОЖЕНИЕ
Г
(справочное)
Влияние окружающей среды на чувствительность микрофона
Настоящее приложение дает сведения о влиянии статического давления и температуры на чувствительность микрофона.
Г.1 Общие сведения
Чувствительность конденсаторного микрофона, в основном, обратно пропорциональна акустическому импедансу микрофона. Упрощенно, импеданс микрофона можно представить в виде импеданса мембраны (обычно учитывают ее массу и гибкость), последовательно соединенного с импедансом воздуха в объеме за мембраной.
Импеданс воздуха в объеме за мембраной определяется тремя составляющими:
- тонким слоем воздуха между мембраной и неподвижным электродом, с учетом затухания и массы;
- слоем воздуха в сквозных отверстиях и канавках на неподвижном электроде, с учетом затухания и массы;
- воздухом в полости позади неподвижного электрода, действующим как гибкость на низких частотах и как масса на высоких частотах из-за волнового движения в полости.
Конструкция микрофона определяет относительный вес этих составляющих. Считают, что плотность и вязкость воздуха линейно зависят от температуры и (или) от статического давления. Отсюда вытекает, что импеданс микрофона также зависит от статического давления и температуры. Коэффициенты статического давления и температуры для определения отношения акустического импеданса при опорных условиях к акустическому импедансу при имеющихся статическом давлении и температуре соответственно приведены ниже.
Г.2 Зависимость от статического давления
Как масса, так и гибкость заключенного в полости воздуха зависит от статического давления до тех пор, пока сопротивление можно считать независимым от статического давления. Коэффициент статического давления обычно зависит от частоты, как это показано на рисунке Г.1. Для частот выше чем 0,5fo (fo - резонансная частота микрофона) эти частотные изменения сильно зависят от волнового движения в полости за неподвижным электродом. В общем, коэффициент статического давления зависит от конструкции деталей, определяющих форму неподвижного электрода, и объема задней полости (далее - задний объем), и их фактические значения могут сильно отличаться для двух микрофонов разных производителей, хотя микрофоны могут принадлежать к одному и тому же типу, например LS1Р. Поэтому коэффициенты статического давления, данные на рисунке Г.1, нельзя применить для любого микрофона.

Рисунок Г.1 - Примеры зависимости коэффициентов статического давления для микрофонов типов LS1P и LS2P от относительной частоты f/fo
Низкочастотное значение коэффициента статического давления обычно находится в пределах от минус 0,01 до минус 0,02 дБ/кПа для микрофонов типа LS 1 Р и от минус 0,003 и минус 0,008 дБ/кПа для микрофонов типа LS2P.
Г.3 Зависимость от температуры
Как масса, так и сопротивление воздуха в замкнутой полости зависит от температуры до тех пор, пока гибкость можно считать независимой от температуры. Общая зависимость температурного коэффициента от частоты показана на рисунке Г.2.
Изменения температуры воздействуют как на воздух в замкнутом объеме, так и на механические элементы микрофона.
Изменение температуры вызывает изменение натяжения мембраны и, следовательно, изменение ее гибкости. Это приводит к изменению чувствительности в диапазоне, который контролируется жесткостью, и к небольшому изменению резонансной частоты.
Суммарный температурный коэффициент является линейной комбинацией как влияния изменения импеданса замкнутого объема воздуха, так и влияния изменения механического натяжения. Низкочастотное значение температурного коэффициента обычно находится в пределах ± 0,005 дБ/К как для микрофона типа LS1P, так и для микрофона типа LS2P. Температурный коэффициент, показанный на рисунке Г.2, нельзя применить для любого микрофона.
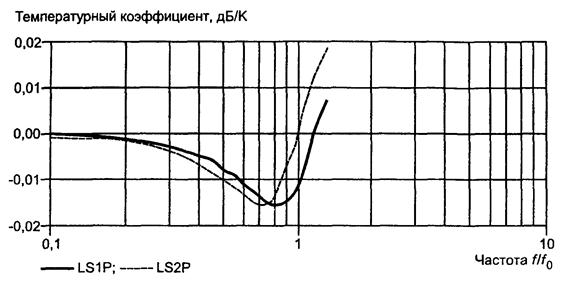
Рисунок Г.2 - Общий вид зависимости температурного коэффициента от частоты для микрофонов типов LS1P и LS2P, вызванной изменением импеданса замкнутого объема воздуха
ПРИЛОЖЕНИЕ
Д
(справочное)
Методы определения параметров микрофона
В настоящем приложении приведены методы определения параметров микрофона, влияющих на акустический передаточный импеданс. Этими параметрами являются глубина и объем передней полости и акустический импеданс микрофона.
Д.1 Глубина передней полости
Глубину передней полости определяют оптическими методами. Глубину можно определить с помощью сканирующего интерферометра, например лазерного, по контуру вдоль диаметра мембраны и внешнего кольца. Такие измерения следует проводить, по крайней мере, для двух перпендикулярных друг к другу диаметров. Другой метод основан на измерении с помощью микроскопа-глубиномера расстояния между точками на верхней части микрофонного кольца и точками на мембране. При этом необходимо провести несколько измерений, распределенных по мембране и по верху кольца.
Д.2 Объем передней полости микрофона с эквивалентным объемом
Объем передней полости микрофона с эквивалентным объемом определяют акустическими методами при опорных внешних условиях.
Испытуемый микрофон вставляют в одно из отверстий камеры связи с тремя входами. В два других отверстия вставляют два конденсаторных микрофона: первый - излучатель, второй - приемник. Измеряют электрический передаточный импеданс между этими двумя микрофонами, подсоединяя к камере связи поочередно испытуемый микрофон и некоторое число полостей с известным объемом, охватывающим действительный объем передней полости микрофона. Объем передней полости вместе с эквивалентным объемом микрофона определяют интерполяцией с измеренными передаточными импедансами.
Возможен вариант использования испытуемого микрофона в качестве микрофона-приемника. При измерении электрического передаточного импеданса необходимо обеспечить большое отношение сигнала к шуму. В этом случае можно использовать либо различное число камер связи известного объема, либо изменение объема получить с помощью некоторого числа калиброванных колец, размещаемых между камерами связи и испытуемым микрофоном. Внутренние диаметры этих колец должны быть равны диаметру передней полости микрофона.
Необходимо отметить, что определяемый обоими методами объем включает в себя эквивалентный объем акустического импеданса мембраны (3.8.1 МЭК 61094-1).
Описанные выше методы могут быть использованы только на низких частотах, когда камеру связи рассматривают как простую гибкость. При использовании второго метода необходимо компенсировать разность в поправках на теплопроводность и на капиллярные трубки при изменении объема камеры связи и, может быть, рассмотреть влияние недостаточного отношения сигнала к шуму.
Д.3. Акустический импеданс микрофона
Акустический импеданс можно выразить в виде комплексного импеданса или в виде комплексного эквивалентного объема (3.8.1 МЭК 61094-1). Допускают, что микрофон можно представить в виде четырехполюсника с сосредоточенными параметрами, описываемого уравнением взаимности (1а). Такое представление будет достаточно точным для определения Za (5.4) до частоты, приблизительно равной 1,3 частоты собственного резонанса микрофона. Акустический импеданс можно определить косвенным методом, основанным на измерении электрической проводимости Y микрофона. При измерении электрической проводимости микрофон акустически нагружают на закрытый четвертьволновый отрезок трубы [р = 0 в уравнении (1а)], а акустический импеданс микрофона затем рассчитывают из уравнения
 , (Д.1)
, (Д.1)
где Zе,о - электрический импеданс при заторможенной мембране, определяемый из измерений, проведенных на достаточно высоких частотах (100-200 кГц), чтобы инерция мембраны эффективно препятствовала ее движению [q = 0 в уравнении (1а)].
Эквивалентными сосредоточенными параметрами, описывающими акустический импеданс микрофона, могут быть либо акустическая масса, акустическая гибкость и акустическое сопротивление, либо резонансная частота, эквивалентный объем для низких частот и декремент затухания мембраны. Сосредоточенные параметры можно определить из уравнения (Д.1). Резонансная частота определяется частотой, при которой мнимая часть Za равна нулю. При низких частотах Za определяется гибкостью и эквивалентным объемом. При резонансе реальная часть Za определяется акустическим сопротивлением и декрементом затухания. Акустическую массу рассчитывают по резонансной частоте и акустической гибкости.
Сосредоточенные параметры, представляющие акустический импеданс, можно также определить акустическими методами. При резонансе сдвиг фазы между звуковым давлением, действующим на мембрану, и напряжением холостого хода будет равен 90°. Эту частоту можно оценить при возбуждении мембраны с помощью электростатического возбудителя с одновременной ее нагрузкой на закрытый четвертьволновый отрезок трубы. При таких условиях декремент затухания можно определить как отношение чувствительности при резонансе к чувствительности на низкой частоте.
ПРИЛОЖЕНИЕ
Е
(справочное)
Физические величины
Некоторые физические величины, описывающие свойства газа в замкнутых камерах связи, входят в уравнения для расчета чувствительностей микрофонов [уравнения (3), (4) и приложения А, Б].
Эти величины: с - скорость звука в газе; r - плотность газа; к - отношение удельных теплоемкостей газа; h - вязкость газа; at - коэффициент температуропроводности газа, - которые зависят от одной или более переменных: температуры, статического давления и влажности.
Многочисленными исследователями опубликованы справочные данные для определенных внешних условий, например для стандартного по составу сухого воздуха при 0 °С и при статическом давлении 101,325 кПа. Для других условий и для влажного воздуха используют основные термодинамические отношения для газовой смеси:
rps = r1p1 + r2p2 + r3p3 + … ; (Е.1)
кps = rc2 = к1р1 + к2р2 + к3р3 + …, (Е.2)
где p1, r1, к1 ..., - парциальные давления, плотность и отношение удельных теплоемкостей парциальных компонентов газовой смеси.
При нормальных внешних условиях проведения градуировки микрофонов из уравнения (Е.1) получают уравнение для смеси из сухого воздуха и водяного пара:
![]() ; (Е.3)
; (Е.3)
 , (Е.4)
, (Е.4)
а из уравнения (Е.2):
![]() , (Е.5)
, (Е.5)
где h = (pm/рs) (Н/100) - молярная концентрация смеси;
ps - статическое давление, Па;
Т - абсолютная температура, К;
H - относительная влажность, %;
То = 273,15К; D - коэффициент для компенсации дисперсии. В работах [2] и [3] приведены значения D = 0,99935 и D = 0,99965, соответственно; pm = рs,r×10D - давление насыщенного водяного пара, Па;
 .
.
Справочное значение rо и со для стандартного сухого воздуха при 0 °С и статическом давлении 101325 Па до сих пор является предметом исследований. Обычно принимают плотность воздуха rо = 1,29295 кг/м3, а скорость звука со = 331,45 м/с.
Коэффициент температуропроводности at определяют по формуле
![]() . (Е.6)
. (Е.6)
Вязкость воздуха h, не зависящую от статического давления, но зависящую от температуры, определяют по формуле
 . (Е.7)
. (Е.7)
Для стандартного сухого воздуха при 0 °С и статическом давлении 101325 Па ho = 17,2×10-6 Па×с. При опорных внешних условиях h = 18,3×10-6 Па×с и at = 21×10-6 м2/с.
Уравнения (Е.3), (E.4), (Е.7) основаны на термодинамических соотношениях для газовой смеси. По эмпирическим формулам, основанным на экспериментальных данных, получают немного отличающиеся значения используемых физических постоянных. Это приводит к разности порядка 0,01 дБ в уровне чувствительности по давлению, полученной при градуировке методом взаимности.
ПРИЛОЖЕНИЕ Ж
(справочное)
Библиография
Ключевые слова: эталонные микрофоны, метод взаимности, камера малого объема, акустический импеданс