ФЕДЕРАЛЬНОЕ
АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р МЭК |

Морское
навигационное оборудование
и средства радиосвязи
СУДОВОЙ РЕГИСТРАТОР ДАННЫХ РЕЙСА
(РДР)
Часть 1
Регистратор
данных рейса (РДР).
Технико-эксплуатационные требования,
методы и требуемые результаты испытаний
IEC 61996-1:2007
Maritime
navigation and radiocommunication equipment and systems -
Shipborne voyage data recorder (VDR) - Part 1: Voyage data recorder (VDR) -
Performance requirements, methods of testing and required test results
(IDT)
|
|
Москва Стандартинформ 2011 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Закрытым акционерным обществом «Центральный научно-исследовательский и проектно-конструкторский институт морского флота» (ЗАО «ЦНИИМФ») на основе собственного аутентичного перевода на русский язык стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 «Радионавигация»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. № 940-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 61996-1:2007 «Морское навигационное оборудование и средства радиосвязи. Судовой регистратор данных рейса (РДР). Часть 1. Регистратор данных рейса (РДР). Эксплуатационные требования, методы испытаний и требуемые результаты испытаний» (IEC 61996-1:2007 «Maritime navigation and radiocommunication equipment and systems - Shipborne voyage data recorder (VDR) - Part 1: Voyage data recorder (VDR) - Performance requirements, methods of testing and required test results»).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2004.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии и в сети Интернет
СОДЕРЖАНИЕ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Морское навигационное оборудование и средства радиосвязи
СУДОВОЙ РЕГИСТРАТОР ДАННЫХ РЕЙСА (РДР)
Часть 1
Регистратор
данных рейса (РДР). Технико-эксплуатационные требования,
методы и требуемые результаты испытаний
Maritime navigation and radiocommunication equipment
and systems. Shipbome voyage data
recorder (VDR). Part 1. Voyage data recorder (VDR). Technical and performance
requirements, methods of testing and required test results
Дата введения - 2011-01-01
1 Область применения
Настоящий стандарт устанавливает минимальные требования к эксплуатационным характеристикам, техническим параметрам и методам испытания, а также требуемым результатам испытаний для судовых регистраторов данных рейса в соответствии с Главой V Международной Конвенции об охране человеческой жизни на море (SOLAS) с дополнениями.
Настоящий стандарт разработан с учетом Резолюции ИМО А.694(17) и МЭК 60945.
Настоящий стандарт включает в себя соответствующие части эксплуатационных требований к регистраторам данных рейса, включенных в Резолюции ИМО А.861(20) и MSC.214(81) (приложение 1).
Примечание - Фрагменты текста настоящего стандарта, формулировки которых аналогичны формулировкам Резолюции ИМО А.861, отпечатаны курсивом, а номера подразделов и пунктов этой Резолюции и соответствующих стандартов по рабочим характеристикам взяты в скобки.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты.
Перечисленные ниже документы обязательно должны применяться с данным стандартом. Для ссылок, содержащих дату, применима только указанная редакция. Для недатированных ссылок применяется последняя редакция упомянутого документа (включая все поправки).
МЭК 60068-2-27:1987 Испытания на внешние воздействия - Часть 2: Испытания - Испытания Еа и руководство. Ударные нагрузки (IEC 60068-2-27:1987, Environmental testing. Part 2: Tests - Test Ea and guidance: Shock)
МЭК 60268-16:2003 Оборудование аудиосистемы - Часть 16: Объективная оценка разборчивости речи посредством коэффициента звукопередачи (IEC 60268-16:2003, Sound system equipment - Part 16: Objective rating of speech intelligibility by speech transmission index)
МЭК 60945:2007 Морское навигационное оборудование и средства радиосвязи - Общие требования - Методы и требуемые результаты испытаний (IEC 60945:2007, Maritime navigation and radiocommunication equipment and systems - Methods of testing and required test results)
МЭК 61097-2 Глобальная система подачи сигналов бедствия и обеспечения безопасности на море (GMDSS) - Часть 2: Аварийный радиомаяк для обнаружения кораблекрушения (EPIRB) системы КОСПАС САРСАТ - Спутниковый радиомаяк для обозначения места бедствия, работающий на частоте 406 МГц - Эксплуатационные требования и требования по рабочим характеристикам, методики и требуемые результаты испытаний (IEC 61097-2, Global maritime distress and safety system (GMDSS) - Part 2: COSPAS-SARSAT EPIRB - Satellite emergency position indicating radio beacon operating on 406 MHz - Operational and performance requirements, methods of testing and required test results)
МЭК 61097-7:1996 Глобальная система подачи сигналов бедствия и обеспечения безопасности на море (GMDSS) - Часть 7: Судовой радиотелефонный приемопередатчик метрового диапазона (ОВЧ) - Эксплуатационные требования и требования по рабочим характеристикам, методики и требуемые результаты испытаний (IEC 61097-7:1996, Global maritime distress and safety system (GMDSS) - Part 7: Shipborne VHF radiotelephone transmitter and receiver - Operational and performance requirements, methods of testing and required test results)
МЭК 61162-1 Морское навигационное и радиосвязное оборудование и системы - Цифровые интерфейсы - Часть 1: Один передатчик сообщений и несколько приемников (IEC 61162-1, Maritime navigation and radiocommunication equipment and systems - Digital interfaces - Part 1: Single talker and multiple listeners)
МЭК 61162-2 Морское навигационное и радиосвязное оборудование и системы - Цифровые интерфейсы - Часть 2: Один передатчик сообщений и несколько приемников. Высокоскоростная передача (IEC 61162-2, Maritime Navigation and Radiocommunication Equipment and Systems - Digital Interfaces - Part 2: Single Talker and Multiple Listeners, High-Speed Transmission)
МЭК 61260:1995 Электроакустика - Октавные и частично-октавные фильтры (IEC 61260:1995, Electroacoustics, Octave-band and fractional-octave band filters)
МЭК 61672-1:2002 Электроакустика - Шумомеры - Часть 1: Технические требования (IEC 61672-1:2002, Electroacoustics - Sound level meters - Part 1: Specifications)
МСЭ-Р М.633-1:1990 Характеристики передачи системы спутниковых радиомаяков для обнаружения места бедствия (спутниковый EPIRB), работающей через систему спутников низкой полярной орбиты на частоте 406 МГц (ITU-R М 633-1:1990, Transmission characteristics of a satellite emergency position-indicating radio beacon (satellite EPIRB) system operating through a low polar-orbiting satellite system in the 406 MHz band)
Eurocae: ED56A Дополнение 1 - Минимальные технические требования по рабочим характеристикам кабинной системы записи голоса (Eurocae: ED56A, Minimum operational performance specification (MOPS) for cockpit voice recorder system)
VESA: 1996 Ассоциация по стандартизации в области видеотехники - Стандарт синхронизации дискретного монитора 1.0, Редакция 0.7 (DMTS) (VESA: 1996, Video Electronics Standards Association Discrete monitor timings standard 1.0, Revision 0.7 (DMTS)
SAE AS8045:1988 Техническое общество по содействию повышения мобильности на суше, в море, воздухе и космосе - Минимальный стандарт рабочих характеристик подводных средств определения местоположения - акустические с автономным питанием (SAE AS8045:1988, Engineering society for advancing mobility land, sea, air and space - Minimum performance standard for underwater locating devices)
3 Термины, определения и сокращения
3.1 Определения
3.1.1 подача соответствующего аварийного сигнала (activation of a uitable alarm): Приглушаемый звуковой аварийный сигнал с постоянной визуальной индикацией, выдаваемый согласно требованиям А.830, но с уровнем слышимого звука в диапазоне от 55 до 65 дБА.
3.1.2 рабочее место на ходовом мостике (bridge workstation): Место, в котором, как ожидается, находится судоводитель при исполнении своих обычных обязанностей на ходовом мостике; он, например, может находиться в следующих местах:
- место управления судном на диаметральной линии;
- крыло (крылья) мостика;
- у основного радиолокатора;
- у штурманского стола;
- на месте рулевого;
- в позиции для связи.
3.1.3 данные (data): Любой элемент информации, принимаемый регистратором для записи, включая численные значения, текст, а также звуковые и радиолокационные сигналы, за исключением особо оговоренных случаев или ситуаций, когда по контексту понятно иное.
3.1.4 специализированный резервный источник питания (dedicated reserve power source (A.861.4.5)): Вспомогательная батарея с соответствующими приспособлениями для зарядки, выделенная специально для регистратора и имеющая емкость, достаточную для работы согласно требованиям 4.5.3.
3.1.5 конечный носитель записи (final recording medium (FRM)): Элемент аппаратуры, на который записываются данные так, чтобы при доступе к нему данные можно было извлечь и воспроизвести с помощью соответствующего оборудования.
3.1.6 воспроизводящее оборудование (playback equipment (A.861.4.4)): Оборудование, совместимое с носителем записи и форматом, в котором производилась запись, применяемое для извлечения данных. Оно также включает в себя монитор или иное устройство представления информации и программное обеспечение, совместимое с оборудованием, являющимся источником исходной информации. Воспроизводящее оборудование обычно не устанавливается на судне и в рамках данного стандарта не рассматривается как составная часть регистратора.
3.1.7 регистратор (recorder (A.861.4.1) (VDR)): Полная система (включая все элементы, необходимые для сопряжения с источником входных данных) для обработки и кодирования данных, с конечным носителем записи в защитной капсуле, с основным и специализированным вспомогательным источниками питания.
3.1.8 разрешение (resolution): Наименьшая воспринимаемая разность между двумя значениями.
3.1.9 датчик (sensor (A.861.4.2)): Любое устройство, внешнее по отношению к регистратору, к которому последний подключен и от которого получает данные для записи.
3.2 Сокращения
ALR - предложение из МЭК 61162: Установка аварийного состояния;
DPT - предложение из МЭК 61162: Глубина относительно датчика преобразователя;
DTM - предложение из МЭК 61162: Геодезическая точка отсчета;
EPFS - электронная система определения местонахождения;
EUT - испытываемое оборудование;
ГМССБ (GMDSS) - Глобальная система подачи сигналов бедствия и обеспечения безопасности на море;
GNS - предложение из МЭК 61162: Данные для определения местонахождения в GNSS;
ГНСС (GNSS) - Глобальная навигационная спутниковая система;
НТС - предложение из МЭК 61162: Команда управления курсом/маршрутом;
HTD - предложение из МЭК 61162: Данные для управления курсом/маршрутом;
HDG - предложение из МЭК 61162: Курс по магнитному компасу;
HDT - предложение из МЭК 61162: Истинный курс;
ИМО (IMO) - Международная Морская Организация;
ИНС (INS) - Интегрированная навигационная система;
МСЭ (ITU) - Международный Союз Электросвязи;
MWV - предложение из МЭК 61162: Скорость и угол ветра;
OOW - вахтенный судоводитель;
ROV - дистанционно управляемое транспортное средство;
RPM - предложение из МЭК 61162: Обороты в минуту;
RSA - предложение из МЭК 61162: Угол перекладки руля;
SAR - система поиска и спасения; поисково-спасательный;
СЭНК (SENC) - системная электронная навигационная карта;
SINAD - отношение мощности сигнала к сумме мощностей шума и искажений;
STI - коэффициент звукопередачи;
ТХТ - предложение из МЭК 61162: Текстовое сообщение;
UTC - универсальное всемирное координированное время;
ОВЧ (VHF) - очень высокая частота (метровый диапазон);
VBW - предложение из МЭК 61162: Скорость относительно земли и/или воды;
XDR - предложение из МЭК 61162: Измерения с помощью датчика-преобразователя;
ZDA - предложение из МЭК 61162: Время и дата.
Примечание - Относительно предложений из МЭК 61162 - см. приложение А.
4 Требования к рабочим характеристикам
4.1 Общие сведения
Для приводимых в данном разделе эксплуатационных требований к рабочим характеристикам дается привязка к номерам пунктов Резолюции ИМОА.861.
4.2 Назначение (А.861/1)
Назначение любого Регистратора данных рейса (РДР) - обеспечить запись и безопасное сохранение с возможностью извлечения данных о местоположении, передвижении, физическом состоянии и управлении судном за период времени перед нештатной ситуацией, имевшей нежелательные последствия для судна, во время и после нее. Информация, хранящаяся в регистраторе, должна быть доступна как для административных органов, так и для владельца судна. Эта информация предназначена для любых последующих расследований с целью установить причины нештатной ситуации.
4.3 Эксплуатационные требования (А.861/5)
4.3.1 Конструкция и устройство (А.861/5.1.4)
В конструкции и устройстве регистратора, которые должны отвечать требованиям Резолюции А.694(17) и международных стандартов, применяющихся для Международной Морской Организации (ИМО), должны быть особым образом учтены требования по защите данных и непрерывности работы, как это подробно изложено в 4.4 и 4.5.
4.3.2 Сохранение последовательных записей (А.861/5.1.1)
Регистратор должен обеспечить длительное сохранение последовательных записей предварительно отобранных элементов данных, характеризующих состояние и выходные параметры оборудования судна, а также команд по управлению судном, которые указаны в 4.6.
4.3.3 Привязка к дате и времени (А.861/5.1.2, 5.4.1)
Для последующего анализа факторов, сопутствующих нештатной ситуации, применяющийся метод записи должен обеспечивать, чтобы различные элементы данных были привязаны к дате и времени при воспроизведении на соответствующем оборудовании.
Метод записи должен быть таким, чтобы привязка по времени всех записанных элементов данных могла быть получена при воспроизведении с разрешением, достаточным для подробного восстановления предыстории нештатной ситуации (см. 4.5.1).
4.3.4 Защитная капсула (А.861/5.1.3)
Конечный носитель записи должен быть помещен в специальную защитную капсулу. Эта капсула должна быть сконструирована так, чтобы она оставалась на судне при любых обстоятельствах. Альтернативный вариант конструкции - ее можно сделать автоматически всплывающей в месте затопления судна, если это произошло.
4.3.4.2 Оценка состояния конечного носителя записи
На случай, когда носитель записи не может быть быстро и достоверно обследован после нештатной ситуации, необходимо предусмотреть средства, позволяющие расследующему нештатную ситуацию специалисту, прежде чем пытаться воспроизвести записанные данные, определить, не подвергался ли носитель записи чрезмерному тепловому воздействию, так что сохранность записанных данных может быть поставлена под сомнение.
4.3.4.3 Доступ к капсуле (А.861/5.1.3.1)
Капсула должна позволять доступ к себе после нештатной ситуации, но быть защищенной от несанкционированного проникновения внутрь нее.
Капсула должна заключать в себе конечный носитель записи. Конечный носитель записи не должен быть доступен в ходе выполнения обычных операций в ходе эксплуатации судна.
Необходимо предусмотреть средства для извлечения записанной информации с помощью внешнего устройства без открытия защитной капсулы.
4.3.4.4 Извлечение данных (А.861/5.1.3.2)
Капсула должна обеспечивать максимальную вероятность сохранения и извлечения данных с конечного носителя после любой нештатной ситуации (см. 5.2).
Конструкция капсулы, содержащей конечный носитель записи, должна предусматривать установку ее на открытой палубе судна. Капсула может быть сконструирована так, чтобы ни при каких обстоятельствах не отделяться от судна, либо ее можно сделать автоматически всплывающей в месте затопления судна, если это произошло (см. 5.2).
Конструкция капсулы должна обеспечивать защиту записанных данных от следующих воздействий (см. 5.2):
- ударной нагрузки;
- проникновения внутрь (пробой);
- огня;
- давления на глубине при погружении.
4.3.4.6 Видимость и маркировка (А.861/5.1.3.3)
Капсула, а также любая ее наружная оболочка должны быть окрашены в хорошо видимый флуоресцентный оранжевый цвет и иметь маркировку светоотражающими материалами, отвечающую соответствующим требованиям Резолюции ИМО А.658, а также иметь следующую надпись:
«VOYAGE DATA RECORDER - DO NOT OPEN - REPORT TO AUTHORITIES»
(РЕГИСТРАТОР ДАННЫХ РЕЙСА - HE ОТКРЫВАТЬ - СООБЩИТЕ ОРГАНАМ ВЛАСТИ)
4.3.4.7 Средства обнаружения (А.861/5.1.3.4)
Капсула должна быть оснащена устройством, помогающим определить ее местоположение.
Как зафиксированная, так и свободно всплывающая конструкция должна включать в себя акустический подводный маяк. В случае защитной капсулы, предназначенной для свободно всплывающего режима работы, она также должна иметь соответствующий радиопередатчик и источник света (см. 5.2).
4.3.5 Интерфейсы (А.861/7)
4.3.5.1 Соответствие серии МЭК 61162
Сопряжение с различными используемыми датчиками должно выполняться согласно соответствующему международному стандарту по устройствам сопряжения серии МЭК 61162, если это возможно (см. приложение А).
Интерфейсы для аудиосистемы ходового мостика, системы аудиосвязи и радиолокатора определяются в 5.6.1, 5.7.1 и 5.8.1 соответственно.
Любые устройства сопряжения, которые могут понадобиться для преобразования сигналов, не отвечающие МЭК 61162, должны соответствовать требованиям МЭК 60945.
В любом случае все соединения всех единиц судового оборудования должны быть выполнены так, чтобы это не влияло на работу этого оборудования даже в случае сбоев в системе регистратора.
Примечание - Не допускается потеря управления и ходовых характеристик судна.
4.3.5.2 Информационный интерфейс
Регистратор должен обеспечивать интерфейс и извлечение сохраненных данных на внешний компьютер (см. приложение С).
4.4 Выбор данных и обеспечение их сохранности (А.861/5.1.4)
4.4.1 Выбор элементов данных (А.861/5.2.1)
Минимальный выбор элементов эксплуатационных данных для записи регистратором приведен в 4.6. Могут также записываться и необязательные, дополнительные элементы данных, при условии, что требования по записи и сохранению заданных элементов полностью выполняются.
В дополнение к эксплуатационным данным, указанным в 4.4.1, во время сдачи регистратора в эксплуатацию на конечный носитель записи необходимо занести блок данных, определяющих конфигурацию регистратора и подсоединенных к нему датчиков. Эти конфигурационные данные должны постоянно сохраняться на конечном носителе записи и быть защищены от изменения. Конфигурационные данные могут быть изменены должным образом уполномоченным сотрудником после изменения в конфигурации. Никакие изменения в конфигурации этого блока данных не должны влиять на запись обязательных элементов данных.
В этот блок данных должна быть включена следующая информация о конфигурации системы и идентичности источников данных:
a) орган, утверждающий тип, и его компетенция;
b) идентификационный номер судна в системе ИМО;
c) используемая(-ые) версия(-ии) программного обеспечения;
d) автоматически вставляемая дата и время последнего дополнения;
e) места размещения микрофонов, положение порта записи и идентификатор (двухсимвольное обозначение типа М1, М2 и т.п.);
Примечание - Это не означает, что звуковые каналы микрофонов должны быть разделены.
f) связь в метровом (ОВЧ) диапазоне - расположение подключенных ОВЧ-установок и порта для записи и идентификатор (двухсимвольное обозначение типов V1, V2 и т.п.);
g) радиолокатор - какие выходы отображения подсоединены (к какому каналу) и идентификатор (двухсимвольное обозначение типов R1, R2, Rx и т.п.);
h) дата и время - от какого источника получаются;
i) местоположение судна - от какой электронной системы определения местонахождения (EPFS) и каково положение приемника этой EPFS относительно судна;
j) другие входы данных, как минимум, - для всех элементов данных, требующихся согласно ИМО А.861 (20)/5.4:
I идентификация оборудования, от которого поступают данные;
II идентификация предложения (МЭК 61162), которое несет эту информацию (утвержденные предложения перечислены в приложении А);
III если получены как собственные предложения в соответствии с МЭК 61162 (например, содержащие преобразованные аналоговые или дискретные сигналы), должно быть обозначено место этой информации внутри предложения, а также указаны соотношения между величинами, принимаемыми датчиками (обороты винта, углы перекладки руля, состояние аварийных сигнализаторов или индикаторов и т.п.), и принятыми значениями.
4.4.3 Защита от несанкционированного доступа (А.861/5.2.2)
Насколько это практически осуществимо, конструкция оборудования регистратора не должна позволять подавать на его вход «подстроенную» информацию, а также корректировать уже записанные данные. Каждая попытка нарушить целостность записанных данных должна фиксироваться.
4.4.4 Целостность записи (А.861/5.2.3)
Метод записи должен быть таким, чтобы каждый записанный элемент данных проверялся на целостность, т. е. был идентичен самому себе на момент приема; в случае обнаружения неисправимой ошибки должен выдаваться аварийный сигнал, соответствующий ИМО А.830(19), но с уровнем слышимого звука в диапазоне 55 - 65 дБА.
В автоматическом режиме регистратор должен непрерывно отслеживать следующие параметры (см. 6.1.10):
a) энергоснабжение;
b) функции записи;
c) частоту ошибочных битов;
d) функционирование микрофона.
При сбое для любого из вышеуказанных параметров должен генерироваться сигнал тревоги в соответствии с требованиями ИМО А.830 (19) в месте, откуда ведется нормальное управление судном. Должна быть обеспечена возможность отключения этого сигнала, но визуальная индикация должна оставаться включенной, пока регистратор работает. Аварийное состояние должно также обозначаться через контакты реле (или эквивалентного устройства), на которое подается питание в обычном (неаварийном) состоянии.
4.5 Эксплуатация
4.5.1 Запись и сохранение данных (А.861/6)
В нормальном рабочем режиме регистратор должен функционировать полностью автоматически. Необходимо предусмотреть средства для того, чтобы каким-либо методом сохранить записанные данные после нештатной ситуации при минимальном прерывании процесса записи, причем не должно быть необходимости в открытии защитной капсулы.
a) Средства управления, применяемые для этого процесса сохранения, должны быть простыми в использовании.
b) В процессе сохранения запись на конечный носитель не должна прерываться более чем на 10 мин. Данные, записанные на конечный носитель записи, не должны быть стерты.
c) Сохраненные данные должны автоматически проверяться на предмет их идентичности данным, записанным на конечном носителе записи. Каждый сбой должен обозначаться.
d) Когда процесс сохранения завершен, необходимо с помощью специального средства перенести записанный набор данных на другое запоминающее устройство, чтобы получить возможность сохранять данные, относящиеся к последующим нештатным ситуациям.
Примечание - Под «процессом сохранения» понимается извлечение данных, записанных на конечном носителе записи. Сохраненный набор данных должен быть защищен от несанкционированного или непреднамеренного переписывания.
4.5.2 Источник питания (А.861/5.3.1)
Чтобы гарантировать, что регистратор будет продолжать фиксировать информацию и во время самой нештатной ситуации, должна быть предусмотрена возможность его работы от судового аварийного источника электропитания. При наличии электропитания регистратор должен работать, за исключением случаев, допускаемых в 4.5.4 (см. 6.1.15).
4.5.3 Специализированный резервный источник питания (А.861/5.3.2)
В случае отказа судового аварийного источника электропитания регистратор должен продолжать запись сигнала аудиосистемы ходового мостика в течение 2 ч (см. 4.6.5), работая от специализированного резервного источника питания. По истечении этих 2 ч вся запись должна быть автоматически остановлена.
4.5.4 Период и длительность записи (А.861/5.3.3)
Запись должна производиться непрерывно, если не будет прервана ненадолго, как это описано в 4.5.1, или остановлена согласно 4.5.3. Промежуток времени, за который должны быть сохранены все элементы данных, должен быть не менее 12 ч. Элементы данных, которые зарегистрированы после этого периода, могут затираться более новыми данными.
Необходимо предусмотреть возможность прекращения записи с помощью специальной кнопки или иным подобным надежным способом.
Примечание - Это можно производить при следующих обстоятельствах:
a) при выполнении процедур технического обслуживания, когда судно находится в порту;
b) когда судно поставлено на прикол;
c) по запросу следственного органа, например, если судно было вовлечено в аварийную ситуацию на море.
4.6 Записываемые элементы данных (А.861/5.4)
4.6.1 Дата и время (А.861/5.4.1)
Эталонные дата и время (по универсальному всемирному координированному времени - UTC) должны получаться от источника, внешнего по отношению к судну (например, от электронной системы определения местонахождения (EPFS) или радиосигналов точного времени), если таковой доступен, или от внутренних часов, по меньшей мере, один раз в час. В записи должно быть обозначено, какой источник используется. Метод записи должен быть таким, чтобы при воспроизведении можно было получить отметки времени всех записанных элементов данных с разрешением, достаточным для подробного воспроизведения предыстории нештатной ситуации, - не меньшим 1 с.
4.6.2 Местоположение судна (А.861/5.4.2)
Широта и долгота, а также используемая точка отсчета должны получаться от заданной электронной системы определения местонахождения или интегрированной навигационной системы судна (при наличии). Способ записи должен обеспечивать, чтобы идентичность и состояние этого источника всегда можно было определить при воспроизведении. Насколько это возможно для данного судна, местоположение должно записываться с разрешением до 0,0001 угловой минуты.
4.6.3 Скорость (А.861/5.4.3)
Скорость относительно воды или грунта (в обоих случаях - поперечная и продольная, если это возможно для данного судна) с указанием, от какого судового оборудования для измерения скорости и расстояния она поступает. Скорость должна фиксироваться, насколько это возможно для данного судна, с разрешением до 0,1 узла.
4.6.4 Курс (А.861/5.4.4)
В том виде, в каком он выдается судовым компасом. Насколько это возможно для данного судна, его курс должен записываться с разрешением до 0,1°.
4.6.5 Звукозапись на ходовом мостике (А.861/5.4.5)
На ходовом мостике необходимо разместить один или несколько микрофонов так, чтобы обеспечить возможность достаточно четкой записи разговоров на посту управления судном, у экранов радиолокаторов, штурманских столов и т.п. (т.е. рабочих местах, указанных в 3.1.9). Насколько это практически осуществимо, положение микрофонов должно также охватывать входы и выходы систем внутренней связи и местного оповещения, а также звуковую аварийную сигнализацию оборудования, установленного на ходовом мостике (технические характеристики см. в 5.6).
Звуковые сигналы на всех рабочих местах должны записываться непрерывно. Дополнительно можно предусмотреть средства идентификации рабочих мест в сигналах, которые записываются у этих мест, чтобы это можно было видеть при анализе записанной информации.
4.6.6 Звукозапись системы связи (А.861/5.4.6)
Передачи в метровом (ОВЧ) диапазоне, имеющие отношение к операциям управления судном, должны записываться независимо от записи аудиосистемы ходового мостика. Записываться должны как передаваемые, так и принимаемые звуковые сигналы; запись должна вестись непрерывно с помощью подсоединенного напрямую приемника метрового диапазона, определенного при установке системы (технические характеристики см. в 5.7).
4.6.7 Данные радиолокатора, выбранные для воспроизведения (А.861/5.4.7)
Сюда включаются данные электронных сигналов одной из судовых радиолокационных установок; записывается информация, которая реально отображается на основном экране этого радиолокатора в момент записи. Сюда должны включаться любые кольца дальности или маркеры, электронные символы прокладки, радиолокационные карты, любые части выбранной системной электронной навигационной карты (SENC) или другой электронной схемы или карты, план рейса, навигационные данные, навигационные аварийные сигналы и данные о состоянии радиолокатора, которые видимы на экране. Метод записи должен быть таким, чтобы при воспроизведении была возможность представить точную копию всего экрана радиолокатора, как он отображается в момент записи, хотя и с ограничениями, накладываемыми технологиями сжатия полосы частот, которые существенны для работы регистратора (см. 5.8).
4.6.8 Эхолот (А.861/5.4.8)
Сюда должна включаться глубина под килем с разрешением до 0,1 м, насколько это возможно для данного судна. При наличии должна записываться шкала глубин, выводимая на экран в текущий момент, и другая информация о состоянии оборудования.
4.6.9 Основные аварийные сигналы (А.861/5.4.9)
Сюда относится состояние всех аварийных сигналов ходового мостика, обязательных согласно требованиям ИМО (см. приложение В). Обязательные аварийные сигналы должны записываться через аудиосистему ходового мостика и как информационный параметр, если это практически осуществимо.
4.6.10 Команды, выдаваемые на руль, и реакции руля (А.861/5.4.10)
Командное значение угла перекладки руля и реакция руля должны записываться с разрешением до 1°, насколько это реализуемо и разрешено для данного судна. Также должны фиксироваться состояние и настройки устройства управления судном по курсу или траектории, если таковой установлен.
4.6.11 Команды, выдаваемые на двигатель, и реакции двигателя (А.861/5.4.11)
Сюда относятся положения всех машинных телеграфов или устройств прямого управления двигателем/гребным винтом, включая обороты вала (валов) (или эквивалентный параметр) и сигналы обратной связи (при наличии), включая индикаторы «передний/задний ход». Сюда также относится состояние вспомогательных винтов на носу и корме судна, если они установлены. Обороты должны записываться с разрешением до 1 об/мин, а шаг винта - с разрешением до 1°.
4.6.12 Состояние проемов (дверей) в корпусе (А.861/5.4.12)
Сюда включается вся обязательная, согласно требованиям ИМО, информация состояния, отображаемая на ходовом мостике.
4.6.13 Состояние водонепроницаемых и противопожарных дверей (А.861/5.4.13)
Сюда включается вся обязательная, согласно требованиям ИМО, информация состояния, отображаемая на ходовом мостике.
4.6.14 Ускорения и нагрузка на корпус судна (А.861/5.4.14)
Если судно оснащено обязательным, согласно требованиям ИМО, оборудованием контроля напряжений и реакции корпуса, то подлежат записи все элементы данных, которые были предварительно выбраны для этого оборудования и имеются в наличии.
4.6.15 Скорость и направление ветра (А.861/5.4.15)
Эти данные записываются, если судно оснащено соответствующим датчиком. Могут фиксироваться либо относительные, либо истинные скорости и направления ветра с указанием, какой из этих вариантов записывается.
5 Технические характеристики
5.1 Привязка к дате и времени (А.861/5.1.2, 5.4.1)
Чтобы гарантировать, что промежутки времени между событиями смогут определяться с разрешением 0,1 с, все элементы данных в моменты их отбора для записи регистратором должны иметь отметки времени, полученные от часов системы регистратора с разрешением 0,05 с. Уход этих системных часов не должен превышать 1 секунду за 1 час.
5.2 Конкретные конструктивные требования к защитной капсуле
Для свободно всплывающей конструкции используется механизм, отвечающий соответствующим требованиям Резолюции ИМО А.662. Любой разъединяющий механизм всплывающей конструкции должен быть автоматически заблокирован, если защитная капсула подвергается воздействию пламени с большей температурой, чем требуется (см. 4.3.4.7) для срабатывания пожарной защиты радиопередающего устройства.
Как свободно всплывающая, так и фиксированная конструкция должна иметь разъединяющий механизм, обеспечивающий освобождение капсулы под водой - либо водолазом, либо дистанционно управляемым транспортным средством. Для этого можно использовать:
a) разрывные болты;
b) освобождающие рычаги;
c) поворотный замок.
Чтобы гарантировать возможность безопасного извлечения капсулы после ее освобождения, в ее конструкции должны быть предусмотрены специальные приливы сушками или ручки.
Примечание - Следует напомнить, что захваты манипуляторов обычных подводных спасательных механизмов имеют максимальное раскрытие лишь 300 мм, предельную силу захвата 1 кН и максимальное усилие вытягивания около 500 Н.
5.3 Гидроакустический маяк (маяки) для защитной капсулы
Защитная капсула должна быть оборудована гидроакустическим подводным маяком, работающим в частотном диапазоне 25 - 50 кГц, имеющим батарею емкостью на 30 дней работы и отвечающим требованиям стандарта SAE AS 8045.
Капсулы свободно всплывающего исполнения должны также быть оснащены радиопередатчиком, соответствующим международным требованиям и передающим сигналы, применяемые для определения положения (например, ИМО А.810, ИМО А.812, МСЭ-R М.632-3 и МСЭ-R М.633-1). Капсула также должна быть оборудована источником света, отвечающим соответствующим требованиям ИМО А.689. Срок службы батареи при питании радиопередатчика и источника света должен быть не менее 7 дней.
Характеристики плавучести защитной капсулы в свободно всплывающем исполнении должны быть достаточными для того, чтобы радиоантенна излучала в основном полусферический и вертикально поляризованный сигнал. Свободно всплывающая защитная капсула должна быть сконструирована так, чтобы необходимый сигнал обеспечивался при волнении открытого моря до 7 баллов (что эквивалентно 10 баллам по ветровой шкале Бофорта).
5.4 Сохранность записанных данных
5.4.1 Долговременное хранение при нормальных условиях
Конечный носитель записи должен сохранять зафиксированные на нем данные в течение по меньшей мере двух лет после завершения записи при условиях эксплуатации и хранения согласно требованиям производителя оборудования. Следует обращать внимание на распределение данных на носителе записи.
5.4.2 Сохранность после нештатной ситуации
Капсула должна быть сконструирована так, чтобы записанные на конечный носитель данные могли быть извлечены из него без потерь после следующих воздействий:
a) Ударные воздействия.
Полусинусоидальный импульс с усилием 50 g и длительностью 11 мсек, как указано в МЭК 60068-2-27 (раздел 11).
b) Проникновение вовнутрь (пробой).
Масса 250 кг со штифтом диаметром 100 мм падает с высоты 3 м, как указано в ED56A (5.3.2b).
c) Огнестойкость.
Низкотемпературное пламя (номинал 260 °С) в течение 10 ч, как указано в Е056А (5.3.2е).
Высокотемпературное пламя (номинал 1100 °С) в течение 1 ч, как указано в ED56A (5.3.2d).
d) Устойчивость к давлению воды при погружении.
Погружение в морскую воду, оказывающую давление 60 МПа (что соответствует глубине 6000 м), как указано в ED56A (5.3.2f).
5.5 Информация, которая должна быть включена в документацию производителя
5.5.1 Указания по установке
При установке применяются следующие принципы:
a) Размещение защитной капсулы.
Защитная капсула должна быть размещена поблизости от ходового мостика на верхней палубе так, чтобы максимизировать вероятность ее выживания и извлечения информации после нештатной ситуации. Капсулу необходимо располагать в стороне от такелажа и других потенциальных препятствий и насколько можно близко к диаметральной линии судна.
Критерии, используемые при оценке оптимального положения, должны включать в себя следующие показатели (не ограничиваясь, однако, лишь ими):
1) удаленность от топлива и других потенциальных источников возгорания;
2) удаленность от возможных источников механических повреждений;
3) условия эксплуатации, способствующие постоянному поддержанию работоспособности;
4) доступность для копирования записанных данных и для планового обслуживания;
5) облегчение снятия и извлечения в подводных условиях с помощью как водолазов, так и средств дистанционного управления. Вокруг капсулы должно иметься место, где могут беспрепятственно работать водолазы или механизмы;
6) для свободно всплывающей конструкции - минимизация вероятности защемления после разъединения.
b) Размещение микрофонов.
c) Расположение всех других компонентов системы регистратора.
d) Вводи коррекция статических данных конфигурации (см. 4.4.1).
e) Требование к устройствам сопряжения в соответствии с 4.3.5.
5.5.2 Руководство по эксплуатации и техническому обслуживанию
Это руководство должно включать в себя следующее:
a) инструкции по обычной эксплуатации регистратора;
b) инструкции по копированию данных с регистратора (см. приложение С);
c) инструкции о действиях, которые необходимо предпринимать после срабатывания любой аварийной сигнализации регистратора;
d) инструкции по извлечению и проверке данных с конечного носителя записи. Это следует производить при выполнении процедур обслуживания или ремонта любого датчика или самого регистратора либо по меньшей мере раз в год;
e) процедуры технического обслуживания, необходимые для обеспечения работоспособности и непрерывной эксплуатационной готовности регистратора. Установщик оборудования должен проанализировать, какие датчики или преобразователи могут уменьшить работоспособность или точность, так что это останется необнаруженным. При выполнении планового обслуживания результаты такого анализа должны учитываться путем проведения соответствующих функциональных проверок и калибровок через требуемые интервалы.
5.5.3 Информация, предназначенная для следственных органов
Должно иметься следующее:
a) инструкции, позволяющие органам следствия изготавливать любые специальные инструменты или устройства сопряжения, необходимые для извлечения из регистратора записанных на него данных;
b) подробное описание действий, необходимых для извлечения данных из неповрежденной защитной капсулы;
c) подробное описание действий, необходимых для извлечения данных из защитной капсулы, которая была повреждена при нештатной ситуации;
d) программное обеспечение и инструкции, позволяющие извлечение и воспроизведение записанных данных (см. приложение С).
5.6 Технические требования по звукозаписи на ходовом мостике
Микрофоны, представляющие собой источники звуковых данных на ходовом мостике, должны рассматриваться как компоненты системы регистратора. Форма соединения, уровни сигналов и значения сопротивлений выбираются производителем. Однако, исходя из удобства тестирования, каждый микрофон должен подсоединяться через некоторую комбинацию штекер/гнездо, которую далее будем называть входным портом.
5.6.2 Эталонный сигнал
Для каждого входа микрофона производитель должен определить некоторый эталонный сигнал на электрическом входном порте регистратора. Он должен быть задан как синусоида с частотой 1 кГц на максимальном уровне, для которого рассчитывается, что регистратор при нем будет удовлетворять настоящим техническим условиям.
5.6.3 Звуковая частотная характеристика
Необходимо подать на входной порт по очереди каждого микрофона в районе ходового мостика сигналы уровнем на 6 и 45 дБ ниже уровня эталонного сигнала. Частота должна постоянно качаться со скоростью не выше 0,1 октавы в секунду в диапазоне от 150 до 6000 Гц; при этом уровень сигнала, извлекаемого из регистратора при воспроизведении, не должен изменяться более чем на 6 дБ в сумме. На входные порты всех других микрофонов сигнал в это время подаваться не должен.
Необходимо определять качество записи для одно- и многомикрофонного входа.
Качество записи для каждого микрофонного порта зоны ходового мостика должно определяться на уровне электрического эквивалента 75 дБА. Оно не должно быть ниже, чем качество, соответствующее коэффициенту звукопередачи 0,85 (см. МЭК 60268-16); при этом на другие порты микрофонов сигнал подаваться не должен.
Качество записи для каждого микрофонного порта зоны ходового мостика должно определяться на уровне электрического эквивалента 75 дБА. Оно не должно быть ниже, чем качество, соответствующее коэффициенту звукопередачи 0,60 (см. МЭК 60268-16); при этом на все другие порты микрофонов сигнал должен подаваться на уровне электрического эквивалента 65 дБА.
5.6.4.3 Уровень звуковых шумов - отношение сигнала к отсутствию сигнала
При отсутствии сигналов на всех микрофонных портах зоны ходового мостика воспроизводимый сигнал на любом выходе воспроизведения должен быть минимум на 48 дБ ниже, чем уровень выхода при приложении на вход сигнала эталонного уровня. Это требование должно удовлетворяться по всему частотному диапазону, определенному в 5.6.3, как при разомкнутых, так и при закороченных входах. Указанное выше соотношение есть-сигнал/нет-сигнала должно удовлетворяться при наличии входных сигналов, выходящих за рамки диапазона, а также при эталонном уровне сигнала.
5.6.5 Уровень звуковых шумов - отношение сигнала к шумам и искажениям
При всех закороченных входных портах, кроме используемого, отношение воспроизводимого сигнала к шумам и искажениям (SINAD) должно быть, по меньшей мере, 24 дБ по всему частотному диапазону, указанному в 5.6.3, и при уровнях входа в диапазоне от 0 до минус 20 дБ по отношению к уровню эталонного сигнала для всех входных портов.
5.7 Звукозапись системы связи
Соединения аудиосистемы с заданными оборудованием метрового диапазона должны соответствовать требованиям МЭК 61097-7. Для удобства тестирования соединение должно производиться через определенную комбинацию штекер/гнездо, которую далее будем называть входным портом.
5.7.2 Эталонный сигнал
Уровень эталонного сигнала для компонентов аудиосистемы, работающих как на передачу, так и на прием, определяется равным 0,775 В среднеквадратического значения.
5.7.3 Звуковая частотная характеристика
При подаче на входной ОВЧ-порт регистратора сигнала уровнем на 6 дБ ниже уровня эталонного сигнала и при постоянном качании частоты со скоростью не выше 0,1 октавы в секунду в диапазоне от 150 до 3500 Гц уровень сигнала, извлекаемого из регистратора при воспроизведении, не должен изменяться более чем на 6 дБ.
Качество записи для ОВЧ-порта регистратора должно задаваться и не должно быть ниже, чем качество, соответствующее коэффициенту звукопередачи 0,75 (см. МЭК 60268-16).
5.7.5 Уровень звуковых шумов - отношение сигнала к отсутствию сигнала
При отсутствии сигналов на ОВЧ-порте воспроизводимый сигнал должен быть минимум на 48 дБ ниже, чем уровень выхода при приложении на вход сигнала эталонного уровня. Это требование должно удовлетворяться по всему частотному диапазону, указанному в 5.7.3, как при разомкнутых, так и при закороченных входах. Указанное выше соотношение есть-сигнал/нет-сигнала должно удовлетворяться при наличии входных сигналов, выходящих за рамки диапазона, а также при эталонном уровне сигнала.
5.7.6 Уровень звуковых шумов - отношение сигнала к шумам и искажениям (SINAD)
Отношение воспроизводимого сигнала к шумам и искажениям должно быть по меньшей мере 24 дБ по всему частотному диапазону, указанному в 5.7.3, и при уровнях входа в диапазоне от 0 до минус 20 дБ по отношению к уровню эталонного сигнала.
5.8 Радиолокационные данные, выбранные для воспроизведения
5.8.1.1 Источники получение данных
5.8.1.1.1 Буферный видеовыход индикатора радиолокатора
Регистратор должен допускать подсоединение к буферному видеовыходу индикатора радиолокатора, изображение с которого будет записываться.
5.8.1.1.2 Видеовыход индикатора радиолокатора через локальную сеть
Регистратор по выбору может иметь возможность соединения с интерфейсом локальной сети (LAN) от радиолокатора для приема его изображений согласно МЭК 62388.
5.8.1.1.3 Интервал записи отображаемого видеокадра
Регистратор должен записывать последовательность одиночных и полных видеокадров размером в экран из специализированного буферного выходного порта радиолокатора. Один полный видеокадр экрана радиолокатора должен записываться с интервалом 15 с или менее.
5.8.1.2 Обязательный формат ввода изображения
Регистратор должен полностью соответствовать требованиям 6.2.4, при этом буферные выходы должны отвечать электрическим техническим требованиям VESA DMTS в той части, в которой VESA DMTS касается мониторов с разрешением экрана между 640´350 и 1280´1024 и частотами обновления между 60 и 85 Гц, а также мониторов 1600´1200 с частотой обновления 60 Гц.
5.8.1.3 Дополнительный формат ввода изображения
В качестве дополнительного варианта регистратор может также работать с другими формами буферных выходов, которые определены конкретными производителями радиолокаторов. Эти выходы должны передавать сигналы, реально используемые для генерации изображения на экране.
5.8.2 Вывод изображения
5.8.2.1 Формат и разрешение
При использовании с воспроизводящим оборудованием, определенным производителем, разрешение выходного изображения должно быть не ниже разрешения изображения на входе. Заданное воспроизводящее оборудование должно иметь выход, отвечающий стандарту VESA DMTS, и цифровой выход, соответствующий требованиям 6.2.4.2.
5.8.2.2 Точность
Запись должна субъективно восприниматься какие имеющая потерь, как это определяется объективными тестами, описанными в 6.2.4.1 - 6.2.4.6. В дополнение к этим объективным тестам изображение на экране воспроизводящего оборудования должно субъективно восприниматься как вполне удовлетворительная копия оригинального изображения, как это описано в 6.2.4.7.
6 Методы и требуемые результаты испытаний
6.1 Общие сведения
6.1.1 Испытательная установка
6.1.1.1 Испытываемое оборудование
В рамках этого раздела любое упоминаемое в тексте «испытываемое оборудование» будет интерпретироваться (если не будет особо оговариваться иное) как полная конфигурация судового регистратора данных рейса, включающая в себя:
a) порт (порты) приемника согласно серии МЭК 61162;
b) микрофон(-ы) и соответствующее оборудование с самопроверкой;
c) входное устройство(-ва) аудиосвязи;
d) входное устройство радиолокатора;
e) устройство(-ва) управления и отображения;
f) конечный носитель записи в своей защитной капсуле;
g) блок(блоки)питания;
h) все прочие компоненты, указываемые производителем;
i) документацию компании-производителя.
Испытываемое оборудование должно устанавливаться на испытательный стенд с помощью соединительных и входных кабелей и с использованием методик, характерных для обычной установки, но эти материалы и установка не должны рассматриваться как часть испытываемого оборудования.
6.1.1.2 Стандартные вводные данные
За исключением случаев, когда вводные данные подробно описываются в методиках конкретных испытаний, при проведении общих эксплуатационных испытаний и проверок должно применяться описанное ниже. Потоки тестовых данных для входов аудиосистемы и радиолокатора должны выбираться так, чтобы использовать методы обработки данных. Необходимо сохранить копию набора данных для сравнения.
- Аудиосистема ходового мостика - к испытываемому оборудованию должно быть подсоединено максимальное количество микрофонов, указанных производителем. На каждый микрофон необходимо подать аудиосигналы, состоящие преимущественно из речи уровнем приблизительно 75 дБА. Можно использовать общий громкоговоритель.
- Система аудиосвязи - к испытываемому оборудованию должно быть подсоединено максимальное количество входов аудиосвязи, указанных производителем. На каждый вход необходимо подать аудиосигналы, состоящие преимущественно из речи, уровень которых задается производителем.
- Радиолокационные данные - на испытываемое оборудование подается тестовый сигнал.
- Входные данные согласно МЭК 61162 - на каждый входной порт подается информационный сигнал, состоящий из непрерывного потока предложений, соответствующих МЭК 61162. Для обеспечения возможности сравнения необходимо сохранять хронологический журнал входных данных.
6.1.1.3 Полные эксплуатационные испытания
Записанные данные просматриваются с помощью воспроизводящего оборудования (см. 6.1.2). Необходимо выполнить достаточно подробную проверку по всей продолжительности записи, чтобы убедиться, что запись велась непрерывно и согласуется со стандартными входными данными. Обычно производятся проверки длительностью 30 сек по всем каналам данных через интервалы приблизительно 30 мин по всей продолжительности записи.
6.1.1.4 Проверка технических характеристик
Необходимо провести сокращенную оценку на качественном уровне по меньшей мере один раз на каждом канале данных в начале проверки, а затем обычно в течение 30 секс интервалами приблизительно в один час - как это необходимо для конкретного испытания.
6.1.2 Оборудование для извлечения и воспроизведения данных
С целью убедить орган, проводящий испытания, в соответствии оборудования предъявляемым требованиям, производитель должен продемонстрировать, что сохраненные на конечном носителе записи данные (см. 4.5.1 и приложение С) могут быть переписаны оттуда в течение периода времени, указанного в приложении С, после необходимого тестирования и воспроизведены с помощью поставляемого программного обеспечения. Воспроизводящая аппаратура не должна рассматриваться как часть испытываемого оборудования, хотя должна быть приложена необходимая документация по программному обеспечению.
6.1.3 Последовательность испытаний
За исключением особо оговоренных случаев, испытания необходимо проводить на одном комплекте испытываемого оборудования; последовательность испытаний может быть произвольной, но должна быть заранее оговорена между производителем и органом, проводящим испытания.
6.1.4 Требования, проверяемые только путем осмотра
Орган, проводящий испытания, должен проверить (путем осмотра испытываемого оборудования, производственных чертежей и прочей необходимой документации, поставляемой производителем) соответствие всем требованиям разделов 4 и 5, включая и те требования, для которых в этих разделах испытания не предусмотрены. Этот осмотр должен проводиться по элементам приводимого ниже списка, но не должен ограничиваться лишь ими. Результаты этого осмотра должны быть приведены в отчете по испытаниям.
а) Защита от несанкционированного доступа (см. 4.3.4.2 и 4.4.2).
Особое внимание следует обратить на следующее:
1) доступ к любому компоненту системы должен требовать использования соответствующих инструментов или ключей;
2) работа с любыми органами управления или клавишами клавиатуры, а также их включение в любой комбинации не должны оказывать влияния на запись;
3) прекращение записи должно быть возможно только с помощью специального ключа или каким-либо иным надежным методом;
4) записанные данные должны быть защищены от несанкционированного доступа с помощью пароля.
b) Маркировка (см. 4.3.4.6).
c) Средства обнаружения (см. 4.3.4.7, 5.3).
d) Источник питания (см. 4.5.2).
e) Документация (см. 5.5).
6.1.5 Условия механических и климатических испытаний при нормальной эксплуатации
Особые условия и испытания на выживание данных после нештатной ситуации описаны в 6.1.13.
Производитель должен указать, какие компоненты системы регистратора должны быть защищены от внешних воздействий, а какие могут быть подвержены им, как это определено в МЭК 60945.
До начала детальных испытаний и после них регистратор необходимо подвергнуть серии проверок рабочих характеристик, чтобы показать, что он отвечает соответствующим требованиям стандарта МЭК 60945.
Важно убедиться путем испытания либо в составе системы, либо отдельно, что батарея специализированного резервного источника питания отвечает требованиям 4.5.3 и 6.1.7 при экстремальных рабочих температурах, определенных в МЭК 60945.
6.1.6 Длительность записи (см. 4.5.4)
6.1.6.1 Метод испытания
Регистратор должен работать непрерывно от обычного внешнего источника питания, записывая тестовые сигналы, указанные в 6.1.1.2, в течение не менее 12 ч.
6.1.6.2 Требуемые результаты
Посредством серии проверок рабочих характеристик необходимо продемонстрировать, что запись на всем протяжении отвечает требованиям соответствующих пунктов 4.5.
6.1.7 Резервный источник питания (см. 4.5.3)
Во время работы регистратора от обычного внешнего источника электропитания и записи тестовых сигналов, как это указано в 6.1.1.2, питание отключается не менее чем на 2 ч. Затем обычное внешнее питание восстанавливается на 10 мин, после чего испытание заканчивается.
Когда обычное внешнее электропитание отключается, должен зазвучать соответствующий звуковой сигнал, который в целях сбережения энергии батареи автоматически отключается через 2 мин, если не был замечен и отключен раньше.
Испытываемый регистратор должен проработать от резервного источника питания в течение 2 ч, а затем отключиться автоматически согласно требованию 4.5.3.
После восстановления обычного внешнего электропитания с помощью соответствующих проверок необходимо продемонстрировать, что:
a) Регистратор возобновил работу в обычном режиме;
b) 9 ч 50 мин записи перед исчезновением внешнего питания сохранено, после чего следует 2 ч записи сигналов аудиосистемы ходового мостика, после чего идет 10 мин обычной записи.
6.1.8 Подзарядка резервного источника питания (см. 4.5.3)
6.1.8.1 Метод испытания
По завершении испытания согласно 6.1.7 обычное внешнее электропитание должно поддерживаться непрерывно в течение 10 ч. Затем необходимо повторить испытание по 6.1.7.
6.1.8.2 Требуемые результаты
Необходимо продемонстрировать, что резервный источник питания зарядился достаточно, чтобы регистратор работал от него в течение 2 ч, как это указано в 6.1.7.2.
6.1.9 Кратковременное исчезновение электрического питания (см. 4.5.2, 4.5.3)
6.1.9.1 Метод испытания
Необходимо повторить испытание в соответствии с 6.1.7.1, но при этом обычное внешнее электропитание восстанавливается через 3 мин, а не через 2 ч.
6.1.9.2 Требуемые результаты
Должен иметь место аварийный режим работы в соответствии с 6.1.7.2. Когда затем обычное внешнее электропитание будет восстановлено, с помощью соответствующих проверок необходимо продемонстрировать, что:
a) регистратор возвращается в нормальный режим работы не позднее, чем через одну минуту после восстановления питания;
b) запись за минимум 11 ч 45 мин перед исчезновением питания сохранена;
c) запись сигналов аудиосистемы ходового мостика продолжалась и при отсутствии внешнего питания.
6.1.10 Целостность системы (см. 4.4.3)
По каждому из следующих аспектов необходимо продемонстрировать, что включается соответствующая аварийная сигнализация:
a) Источник питания.
При работе от обычного внешнего источника питания это питание должно отключаться.
Примечание - Этот тест включен в испытания согласно 6.1.7, 6.1.8 и 6.1.9.
b) Функция записи, частота появления ошибочных битов.
Производитель должен продемонстрировать, что если тестовые информационные сигналы (от радиолокатора, аудиосистемы и данные) некорректно записываются на конечный носитель записи, то подается соответствующий аварийный сигнал. Частота появления ошибочных битов для цифровых сигналов не должна превышать 1 на 108.
Примечание - Во избежание необходимости создавать для регистратора ситуацию реального сбоя, допускается контролировать его путем изучения документации.
c) Функциональные возможности микрофонов.
Производитель должен продемонстрировать, что по меньшей мере раз в течение каждых 12 ч производится незаметное акустическое тестирование всех микрофонов.
6.1.11 Сохранение последовательных записей (см. 4.3.2)
Производитель должен продемонстрировать, что регистратор сохраняет последовательные записи в соответствии с 4.3.2.
6.1.12 Привязка к дате и времени (см. 4.3.5, 5.1)
6.1.12.1 Метод испытания
Регистратор должен записывать тестовый набор данных, определенный в 6.1.1.2, в течение 30 мин. Эти записанные данные воспроизводятся.
6.1.12.2 Требуемые результаты
Отметки времени воспроизводимых данных должны отвечать требованиям 4.3.3 и 5.1.
6.1.13 Конструкция и устройство защитной капсулы (см. 4.3.1, 4.3.4, 5.2)
6.1.13.1 Определение испытываемого оборудования
Исключительно для этих испытаний, понятие «испытываемое оборудование» будет означать:
a) защитную капсулу в комплекте со всеми внутренними устройствами, прокладками и термоизоляцией;
b) конечный носитель записи в том виде, как он обычно установлен внутри защитной капсулы;
c) любые блоки питания или батареи, которые обычно являются частью содержимого капсулы;
d) все элементы крепления и разъединяющие механизмы, включая механизм автоматического отделения для варианта свободно всплывающей капсулы;
e) акустический маяк или его механический эквивалент;
f) обычный электрический или иной кабель, через который данные передаются между основными блоками регистратора и конечным носителем записи в процессе нормальной эксплуатации.
6.1.13.2 Тестовые данные для предварительной загрузки на конечный носитель записи
Сигналы тестовых данных (описаны в 6.1.1.2) должны записываться в течение 12 ч.
6.1.13.3 Испытания и их последовательность
Испытываемое оборудование должно быть подвергнуто испытаниям в соответствии с 6.1.13.4 - 6.1.13.8 включительно в перечисленном ниже порядке:
a) ударные воздействия;
b) защита от проникновения внутрь;
c) тест на воздействие низкотемпературного пламени;
d) тест на воздействие высокотемпературного пламени;
e) погружение в морскую воду для испытания механизма отделения (только для свободно всплывающей конструкции);
f) глубокое погружение в морскую воду.
Эти испытания обычно проводятся на одной испытываемой капсуле. Если используется несколько, допустимы такие последовательности:
Если используются две капсулы, последовательность испытаний должна быть такой:
а), b) - на одной капсуле и с), d), e) и f) - на другой либо
а), b), с), е) и f) - на одной капсуле и a), b), d), e) и f) - на другой.
Если используются три капсулы, последовательность испытаний должна быть такой:
а) и b) - на первой капсуле; с), е) и f) - на второй; d), e) и f) - на третьей.
Как минимум, тест на воздействие пламени, тест на погружение в морскую воду (если необходимо) и тест на глубокое погружение должны быть проведены на одной и той же капсуле. Однако не является обязательным требованием, чтобы все другие испытания в дополнение к вышеуказанным проводились на одной и той же капсуле.
Испытание на глубокое погружение может проводиться на самом носителе записи, если можно показать, что этот носитель не может быть поврежден в результате разрушения его защитной капсулы.
Испытываемое оборудование должно быть закреплено на испытательном стенде в соответствии с инструкциями производителя по установке.
Затем оно должно быть испытано согласно требованиям МЭК 60068-2-27, (раздел 11) со следующими параметрами:
a) форма импульса - полусинусоидальная;
b) допуски - согласно рисунку 2;
c) особый случай изменения скорости - не применяется;
d) поперечное движение - не применяется;
e) метод установки - фиксация на испытательном оборудовании или столе с помощью обычных судовых монтажных приспособлений, указанных производителем;
f) пиковое ускорение - 50 g, длительность номинального импульса - 11 мсек;
g) предварительные условия - никаких;
h) начальные измерения (6.1.3);
i) направление и количество ударов - стандартно;
j) выдерживание условий ударных нагрузок;
k) критерии приемки и отбраковки;
l) не применяется;
m) не применяется;
n) не применяется.
6.1.13.5 Защита от проникновения внутрь
Испытываемое оборудование должно быть закреплено на испытательном стенде в соответствии с инструкциями производителя по установке.
Защитная капсула подвергается испытанию согласно требованиям ED56A (5.3.2b). Используется груз массой 250 кг при диаметре штифта 100 мм, который падает с высоты 3 м.
Защитная капсула подвергается воздействию низкотемпературного пламени (260 °С) в течение 10 ч и высокотемпературного пламени (1100 °С) - в течение одного часа в соответствии с требованиями ED56A - (дополнение 1).
Примечание - Если во время испытания используется реальный акустический маяк, необходимо соблюдать осторожность ввиду возможности взрыва батареи питания.
6.1.13.7 Неглубокое погружение в морскую воду
Это испытание применяется только для капсул свободно всплывающей конструкции. Механизм отделения должен испытываться на соответствие применяемым требованиям Резолюции ИМО А.662. Должно быть продемонстрировано, что разъединяющий механизм плавающей конструкции будет заблокирован при воздействии пламени с температурой большей, чем предел выживания для радиопередающего устройства, в соответствии с требованиями 4.3.4.3.1.
6.1.13.8 Глубокое погружение в морскую воду
Защитная капсула подвергается испытаниям согласно требованиям ED56A (5.3.2f). Необходимо провести как 24-часовой тест с погружением на 6000 м, описанный в параграфе 1, так и 30-дневный тест с погружением на 3 м, описанный в параграфе 2.
6.1.13.9 Требуемые результаты испытаний 6.1.13.4 - 6.1.13.8
По завершении всех последовательностей испытаний все механизмы разъединения должны функционировать согласно соответствующим техническим требованиям. Ремонт конечного носителя записи должен быть минимальным.
По завершении испытаний сохраненные данные должны быть извлечены согласно инструкциям производителя, которые могут включать в себя исправление ошибок. Ремонт конечного носителя записи должен быть минимальным. В целях воспроизведения конечный носитель записи может выниматься из испытываемого оборудования и устанавливаться в стандартное воспроизводящее оборудование, которое поставляется производителем регистратора. Записи должны отвечать требованиям по проверкам эксплуатационных характеристик, указанным в 6.1.1.3; при этом по меньшей мере 99 % данных должны быть извлекаемы. Термические, механические или коррозионные повреждения носителя записи, нанесенные во время испытаний и повлекшие за собой потерю данных, будут представлять собой отказ.
Подводный гидроакустический маяк нет нужды подвергать испытанию пламенем, но он должен быть постоянно прикреплен к капсуле.
6.1.13.10 Средства местоопределения (см. раздел 5.3)
Гидроакустический маяк должен испытываться на соответствие требованиям SAE AS 8045.
Если капсула имеет свободно всплывающую конструкцию, радиопередатчик и источник света должны испытываться на соответствие применяемым частям МЭК 61097-2 и Резолюции ИМО А.689 (см. также 5.3), но длительность испытания равна семи дням.
6.1.14 Выбор элементов данных (см. 4.4.1)
Производитель должен продемонстрировать, что данные конфигурации, указанные в 4.4.1, могут вводиться, сохраняться и извлекаться.
6.1.15 Источник питания (см. 4.5.2)
Должно быть подтверждено, что регистратор работает в течение всего времени, когда на него подано питание.
6.2 Предназначенные для записи элементы данных (см. 4.6)
6.2.1 Дата/время - местоположение судна - скорость - курс (см. 4.6.1, 4.6.2, 4.6.3, 4.6.4)
6.2.1.1 Метод испытания
Метод испытания и требуемые результаты - одни и те же для всех этих четырех параметров.
Ввести данные о дате/времени, местоположении судна, его скорости и курсе, по очереди и согласно формату, указанному в 4.3.5, на порт, обозначенный соответствующим параметром. Ввод данных должен производиться со скоростью, большей, чем 1 раз в секунду, а изменяться - со скоростью, меньшей, чем 1 раз в секунду. Записать данные за 30 мин. Воспроизвести данные.
6.2.1.2 Требуемые результаты
Все измененные данные должны быть точно воспроизведены с частотой по меньшей мере раз в секунду.
6.2.2 Звукозапись на ходовом мостике (см. 4.6.5)
6.2.2.1 Звуковая частотная характеристика для аудиосистемы ходового мостика - в соответствии с 5.6.3.
6.2.2.1.1 Метод испытания
Требуется следующее испытательное оборудование:
a) генератор аудиосигнала с качающейся частотой;
b) измеритель мощности в аудиодиапазоне;
c) частотомер.
Закоротив входные порты всех других микрофонов в этой зоне, подсоединить генератор аудиосигнала к испытываемому порту и настроить его выход, чтобы получить сигнал с частотой, качающейся во всем диапазоне частот.
Настроить частоту качания на 0,1 октавы в секунду. На входе испытываемого оборудования настроиться на уровень на 6 дБ ниже уровня эталонного сигнала. Записать этот сигнал.
Воспроизвести эту запись и измерить уровень и частоту на выходе. Определить изменение уровня для всего диапазона частот. Повторить это испытание для всех других микрофонных портов этой зоны.
Повторить описанные испытания, настроив вход на уровень на 45 дБ ниже эталонного уровня.
6.2.2.1.2 Требуемые результаты
Результаты испытаний должны удовлетворять требованиям 5.6.3.
6.2.2.2 Показатель качества для аудиосистемы ходового мостика (см. 5.6.4)
6.2.2.2.1 Одиночный порт (см. 5.6.4.1)
6.2.2.2.1.1 Метод испытания
Требуется следующее испытательное оборудование:
a) генератор сигнала с заданным коэффициентом звукопередачи;
b) анализатор коэффициента звукопередачи;
c) генератор белого шума;
d) полосовой фильтр звуковых частот (150 - 6000 Гц).
Закоротив входные порты всех других микрофонов в этой зоне, подсоединить генератор сигналов к испытываемому порту.
Настроить генератор сигналов на уровень, эквивалентный 75 дБА. Записать этот сигнал.
Воспроизвести запись и проанализировать показатель качества. Повторить это испытание для всех других микрофонных портов этой зоны.
6.2.2.2.1.2 Требуемые результаты
Результаты испытаний должны удовлетворять требованиям 5.6.4.1.
6.2.2.2.2 Несколько портов (см. 5.6.4.2)
6.2.2.2.2.1 Метод испытания
Подав на все другие микрофонные порты в этой зоне электрический сигнал, эквивалентный 65 дБА белого шума, ограниченного по полосе, подсоединить генератор сигналов к испытываемому порту. Настроить генератор сигналов на уровень, эквивалентный 75 дБА. Записать этот сигнал.
Воспроизвести запись и проанализировать результаты. Повторить это испытание для всех других микрофонных портов этой зоны.
6.2.2.2.2.2 Требуемые результаты
Результаты испытаний должны удовлетворять требованиям 5.6.4.2.
6.2.2.3 Уровень звуковых шумов - отношение сигнала к отсутствию сигнала для аудиосистемы ходового мостика (см. 5.6.4.3)
6.2.2.3.1 Метод испытания
Требуется следующее испытательное оборудование:
a) генератор звукового сигнала;
b) А-взвешенный фильтр согласно МЭК 61672;
c) фильтры третьей октавы согласно МЭК 61260;
d) измеритель мощности в аудиодиапазоне.
Закоротив входные порты всех других микрофонов в этой зоне, подсоединить генератор звукового сигнала к испытываемому порту. Записать этот сигнал.
Дать регистратору поработать в течение 30 сек в каждом из следующих входных режимов: разомкнутый, закороченный и с тремя отдельными поданными сигналами, выходящими за границы полосы. При тестах с внеполосными сигналами подсоединять генератор сигнала к каждому испытываемому порту и устанавливать входной сигнал на уровень эталонного сигнала.
Выбрать по очереди частоты 8, 10 и 12,5 кГц. Воспроизвести записи, измеряя А-взвешенный уровень шумов в диапазонах третьей октавы.
В таблице 1 дается пример, как вводить эти данные.
Ввести уровень шумов в диапазонах третьей октавы в виде коэффициента А относительно выхода для эталонного сигнала на входе, выраженного в дБ. Записать наименьшее значение в последнем столбце этой таблицы. Повторить это испытание для всех других микрофонных портов этой зоны.
6.2.2.3.2 Требуемые результаты
Результаты испытаний должны удовлетворять требованиям 5.6.4.3.
Таблица 1 - Звукозапись на ходовом мостике, измерения отношения «есть сигнал/нет сигнала»
Эталонный уровень:____________________________
|
А-взвешенный уровень выхода по отношению к эталонному уровню, дБ |
|||||
|
Вне полосы на эталонном уровне |
|||||
|
Гц |
Разомкнуто |
Закорочено |
8000 Гц |
10000 Гц |
12500 Гц |
|
200 |
|||||
|
250 |
|||||
|
315 |
|||||
|
400 |
|||||
|
500 |
|||||
|
630 |
|||||
|
800 |
|||||
|
1000 |
|||||
|
1250 |
|||||
|
1600 |
|||||
|
2000 |
|||||
|
2500 |
|||||
|
3150 |
|||||
|
4000 |
|||||
|
5000 |
|||||
|
Минимальное отношение «есть-сигнал/нет сигнала» |
|||||
6.2.2.4 Уровень звуковых шумов - отношение сигнала к шумам и искажениям для аудиосистемы ходового мостика (см. 5.6.5)
6.2.2.4.1 Метод испытания
Требуется следующее испытательное оборудование:
a) аттенюатор;
b) полосовой фильтр;
c) измеритель искажений.
Закоротив порты всех других микрофонов в этой зоне, подсоединить испытываемый порт через аттенюатор к источнику сигнала измерителя искажений и записать сигналы на интервалах третьей октавы на этой полосе, изменяя уровень от эталонного до минус 20 дБ шагами по 5 дБ, записывая сигналы на каждом шагу.
Воспроизвести эти записи и измерить суммарный коэффициент гармонических искажений плюс шумы для каждого режима тестирования. В таблице 2 дается пример ввода этих данных.
В качестве варианта измерение может быть проведено после пропускания воспроизводимого сигнала через полосовой (150 - 6000 Гц) фильтр.
Ввести искажения с шумами в виде отношения мощностей, выраженного в дБ.
Записать наименьшее значение в последнем столбце этой таблицы. Повторить это испытание для другого микрофонного порта этой зоны.
6.2.2.4.2 Требуемые результаты
Результаты испытаний должны соответствовать требованиям 5.6.5.
Таблица 2 - Звукозапись на ходовом мостике, измерения отношения сигнала к шумам и искажениям (SI NAD)
Эталонный уровень:
|
Вход относительно эталонного уровня |
|||||
|
Гц |
0 дБ |
-5 дБ |
-10 дБ |
-15 дБ |
-20 дБ |
|
150 |
|||||
|
200 |
|||||
|
250 |
|||||
|
315 |
|||||
|
400 |
|||||
|
500 |
|||||
|
630 |
|||||
|
800 |
|||||
|
1000 |
|||||
|
1250 |
|||||
|
1600 |
|||||
|
2000 |
|||||
|
2500 |
|||||
|
3150 |
|||||
|
4000 |
|||||
|
5000 |
|||||
|
Минимальное отношение сигнала к шумам и искажениям |
|||||
6.2.3 Звукозапись системы связи (см. 5.7)
6.2.3.1 Звуковая частотная характеристика для системы связи (см. 5.7.3)
6.2.3.1.1 Метод испытания
Требуется следующее испытательное оборудование:
a) генератор аудиосигнала с качающейся частотой;
b) измеритель мощности в аудиодиапазоне;
c) частотомер.
Подсоединить генератор аудиосигнала к испытуемому порту и настроить его выход, чтобы получить сигнал с частотой, качающейся во всем диапазоне частот. Настроить частоту качания на 0,1 октавы в секунду. На входе испытуемого оборудования настроить на уровень на 6 дБ ниже уровня эталонного сигнала. Записать этот сигнал.
Воспроизвести эту запись и измерить уровень и частоту на выходе. Определить изменение уровня для всего диапазона частот.
6.2.3.1.2 Требуемые результаты
Результаты испытаний должны соответствовать требованиям 5.7.3.
6.2.3.2 Показатель качества для системы связи (см. 5.7.4)
6.2.3.2.1 Метод испытания
Требуется следующее испытательное оборудование:
a) генератор сигнала с заданным коэффициентом звукопередачи;
b) анализатор коэффициента звукопередачи.
Подсоединить генератор сигналов к испытуемому порту. Настроить генератор сигналов на уровень на 6 дБ ниже эталонного уровня. Записать этот сигнал.
Воспроизвести запись и проанализировать коэффициент звукопередачи.
6.2.3.2.2 Требуемые результаты
Результаты испытаний должны соответствовать требованиям 5.7.4.
6.2.3.3 Уровень звуковых шумов - отношение сигнала к отсутствию сигнала для системы связи (см. 5.7.5)
6.2.3.3.1 Метод испытания
Требуется следующее испытательное оборудование:
a) генератор звукового сигнала;
b) А-взвешенный фильтр согласно МЭК 61672;
c) фильтры третьей октавы согласно МЭК 61260;
d) измеритель мощности в аудиодиапазоне.
Подсоединить генератор звукового сигнала к испытуемому порту. Записать этот сигнал. Дать регистратору поработать в течение 30 с в каждом из следующих входных режимов: разомкнутый, закороченный и с тремя отдельными поданными сигналами, выходящими за границы полосы.
При испытаниях с внеполосными сигналами подсоединять генератор сигнала к каждому испытуемому порту и устанавливать входной сигнал на уровень эталонного сигнала.
Выбрать по очереди частоты 5, 6, 3 и 8 кГц. Воспроизвести записи, измеряя А-взвешенный уровень шумов в диапазонах третьей октавы.
В таблице 3 дается пример, как вводить эти данные.
Ввести уровень шумов в диапазонах третьей октавы в виде отношения к выходу для входа эталонного сигнала, выраженного в дБ. Записать наименьшее значение в последнем столбце этой таблицы.
6.2.3.3.2 Требуемые результаты
Результаты испытаний должны соответствовать требованиям 5.7.5.
Таблица 3 - Звукозапись системы связи, измерения отношения «есть сигнал/нет сигнала»
Эталонный уровень:__________________________
|
А-взвешенный уровень выхода по отношению к эталонному уровню, дБ |
|||||
|
Вне полосы на эталонном уровне |
|||||
|
Гц |
Разомкнут |
Закорочен |
5000 Гц |
6300 Гц |
8000 Гц |
|
200 |
|||||
|
250 |
|||||
|
315 |
|||||
|
400 |
|||||
|
500 |
|||||
|
630 |
|||||
|
800 |
|||||
|
1000 |
|||||
|
1250 |
|||||
|
1600 |
|||||
|
2000 |
|||||
|
2500 |
|||||
|
3150 |
|||||
|
Минимальное отношение «есть сигнал/нет сигнала» |
|||||
6.2.3.4 Уровень звуковых шумов - отношение сигнала к шумам и искажениям для системы связи (см. 5.7.6)
6.2.3.4.1 Метод испытания
Требуется следующее испытательное оборудование:
a) аттенюатор;
b) полосовой фильтр;
c) измеритель искажений.
Подсоединить испытуемый порт через аттенюатор к источнику сигнала измерителя искажений и записать сигналы на интервалах третьей октавы на этой полосе, изменяя уровень от эталонного до минус 20 дБ шагами по 5 дБ, записывая сигналы на каждом шагу.
Воспроизвести эти записи и измерить суммарный коэффициент гармонических искажений плюс шумы для каждого режима тестирования.
В таблице 4 дается пример ввода этих данных.
В качестве варианта измерение может быть проведено после пропускания воспроизводимого сигнала через полосовой (150 - 3500 Гц) фильтр. Ввести искажения с шумами в виде отношения мощностей, выраженного в дБ. Записать наименьшее значение в последнем столбце этой таблицы.
6.2.3.4.2 Требуемые результаты
Результаты испытаний должны соответствовать требованиям 5.7.6.
Таблица 4 - Звукозапись системы связи, измерения отношения сигнала к шумам и искажениям (SINAD)
Эталонный уровень:_________________
|
Вход относительно эталонного уровня |
|||||
|
Гц |
0 дБ |
-5 дБ |
-10 дБ |
-15 дБ |
-20 дБ |
|
150 |
|||||
|
200 |
|||||
|
250 |
|||||
|
315 |
|||||
|
400 |
|||||
|
500 |
|||||
|
630 |
|||||
|
800 |
|||||
|
1000 |
|||||
|
1250 |
|||||
|
1600 |
|||||
|
2000 |
|||||
|
2500 |
|||||
|
3150 |
|||||
|
Минимальное отношение сигнала к шумам и искажениям |
|||||
6.2.4 Радиолокационные данные, выбранные для воспроизведения (см. 4.6.7, 5.8)
Испытания, указанные в 6.2.4, призваны установить, что регистратор отвечает функциональным требованиям 4.6.7. В ходе их измеряются расхождения между входными изображениями, генерированными на предопределенном наборе тестовых данных, и выходом регистратора, который их записал. Учитывая, что при использовании современных носителей данных регистратору необходимо сначала получить и оцифровать изображение, прежде чем можно будет его сохранить, рассматривается две категории ошибок:
- ошибки цвета, при которых какая-либо деталь передается разными цветами или яркостью на входном и выходном изображениях;
- ошибки положения, при которых какая-либо деталь изображения находится в разных положениях на входном и выходном изображениях.
Что касается цвета, целью является допущение только тех ошибок, которые человеческий глаз (в идеале) не замечает и которые, во всяком случае, не могут приводить к неоднозначностям.
В отношении положения разрешаются небольшие погрешности масштабирования при хорошей линейности: например, приемлемым является небольшое общее увеличение изображения, а вот изменение масштаба, которое варьируется по различным частям изображения, таковым не считается. По этой причине для оценки приемлемости имеющихся погрешностей применяется некоторая мера линейности.
Приводимые ниже определения только для 6.2.4.2 - 6.2.4.6 включительно.
Цвет (colour)
триада действительных значений (r, g, b), определяющая величину красного, зеленого и голубого тона соответственно,
где 0 ≤ r ≤ 1, 0 ≤ g ≤ 1 и 0 ≤ b ≤ 1.
Как таковое, понятие «цвет» включает в себя как цветовой тон, так и интенсивность;
изображение (image)
функция, определяющая цвет для каждого значения, состоящего из пары действительных чисел (х, у), представляющих Декартовы координаты, где 0 ≤ х ≤ 1 и 0 ≤ у ≤ 1;
пиксель (точка изображения) (pixel)
прямоугольная область изображения, для которой цвет изображения постоянен. Эта область определяется двумя парами - (х0, у0) и (х1, у1) - представляющими Декартовы координаты диагонально противоположных углов прямоугольника. Стороны этого прямоугольника должны быть параллельны Декартовым осям; кроме того, х0 < х1 и у0 < у;
входное изображение (input image resolution)
одно из множества предварительно заданных тестовых изображений (см. 6.2.4.4). Эти тестовые изображения определены математически и представляют собой сетку пикселей различных цветов;
разрешение входного изображения (output image)
целые числа Х и У, представляющие собой количества пикселей по координатам соответственно х и у входных изображений, с которыми согласно заявлению производителя регистратора последний может оперировать;
выходное изображение (bit-mapped image)
изображение, которое генерируется воспроизводящим оборудованием при воспроизведении записи исходного изображения;
растровое изображение
изображение, состоящее полностью из пикселей, причем для каждого пикселя произведения Хх0, Уу0, Хх1 и Уу1 являются целыми числами.
Производитель должен объявить, при каких разрешениях X, У для входных изображений, указанных в 5.8.1.2, и с какими дополнительными входами, разрешенными 5.8.1.3, подразумевается эксплуатировать регистратор. Все испытательное оборудование должно работать при достаточно высоких разрешениях. Испытуемое оборудование подсоединяется, как показано на рисунке 1.
Тестовый набор данных (А), представляющий собой предварительное растровое тестовое изображение, загружается в одно запоминающее устройство (В) для хранения входных изображений. Содержимое этой памяти затем считывается через интерфейс, включающий в себя цифро-аналоговый преобразователь (С), который, в свою очередь, вырабатывает два обязательных выходных сигнала и один дополнительный сигнал.
Сигналы (S1) и (S2) идентичны.
Сигнал (S1) должен удовлетворять требованиям VESA DMTS; он подается на монитор (D), который аттестован согласно этому же стандарту.
Сигнал (S2) подает входное изображение на испытуемое оборудование (Е) и должен удовлетворять требованиям 5.8.1.2.
Сигнал (S3) - это любой сигнал, дополнительно выбранный производителем регистратора в соответствии с требованиями 5.8.1.3 в качестве входа для испытуемого оборудования (Е).
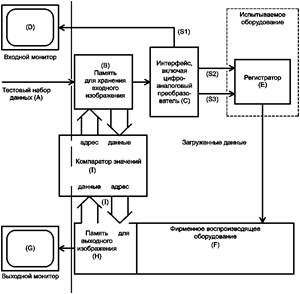
Рисунок 1 - Блок-схема испытаний
Примечание - Для блока интерфейса (С) может и не требоваться цифро-аналоговый преобразователь.
В ходе испытания подробные хронометражи видеосигналов должны варьироваться в пределах, допустимых согласно DMTS, и дополнительных пределах, указанных в 5.8.1.2. Если производитель регистратора пожелает подсоединиться ко входному изображению, разрешенному в соответствии с 5.8.1.3, то хронометражи должны изменяться в пределах, заданных производителем радиолокатора.
Сохраненные на конечном носителе записи данные, которые относятся к записанному изображению, должны извлекаться с помощью средств, указанных или поставленных производителем согласно требованиям 4.3.4.2, и подаваться в качестве входа на воспроизводящее оборудование (F), которое также определяется или поставляется производителем. Это воспроизводящее оборудование должно иметь два выхода. Первый - это выход видеосигнала, отвечающего требованиям DMTS, подаваемый на монитор (G); второй - это выход цифровых данных от внешне адресуемой памяти для хранения выходного изображения (Н), которая может быть виртуальной или реальной.
Суть испытания состоит в том, что компаратор значений (I) получает красное, зеленое и голубое значения для некоторого пикселя, расположенного по целочисленному адресу хХ, уУ, из памяти для входных изображений (В) и запрашивает значения из памяти для выходных изображений по тому же самому адресу. Эта операция проделывается для всех пикселей в памяти для входных изображений.
Содержимое этих двух устройств памяти для изображений делится на небольшие прямоугольники, которые сравниваются по отдельности. Положения соответствующих прямоугольников в этих двух изображениях могут быть слегка сдвинуты друг относительно друга перед сравнением, что позволяет скомпенсировать некоторую погрешность центровки в записанных изображениях. Разрешается, чтобы величина этого сдвига слегка варьировалась в пределах изображения с целью компенсации различных нелинейностей. Любой сдвиг относится ко всему прямоугольнику и к каждому адресу, соответствующему пикселю входного изображения, которое его содержит. Линейность оценивается отдельно по осям х и у путем рассмотрения по отдельности строк и столбцов прямоугольников.
Примечание - см. рисунок 2.
Ошибки по цвету и положению определяются по отдельности: те и другие понимаются как разность между содержимым памяти для входного цифрового изображения (В) и выходного цифрового изображения (Н). Для удобства анализа, а также с целью сделать метод испытания независимым от разрешения изображения, координаты пикселей и амплитуды аналоговых сигналов, представляющих значения красного (r), зеленого (g) и голубого (b) сигналов, нормализуются перед сравнением посредством деления их реальных (actual) значений на максимальные.
Например: r = ractuaIR, 0 ≤ ractual ≤ R, x = xactualIX, 0 ≤ xactual ≤ X и т.д.
Все испытания, описанные в 6.2.4.4 и 6.2.4.5, должны проводиться для каждого изображения из набора тестов, определенных в 6.2.4.2.
Каждая из осей х и у входного изображения делится нацело нал равных частей; при этом n = 8.
Примечание - Для облегчения понимания в тексте ниже мы будем ссылаться на переменную n, понимая, однако, при этом, что ее значение зафиксировано равным 8.
Таким образом, все изображение подразделяется на n2 прямоугольников, проиндексированных двумя целочисленными переменными j и k, где 0 ≤ j ≤ n - 1 и 0 ≤ k ≤ n - 1. Прямоугольник (j, k) имеет диагонально противоположные углы с координатами (j/n, k/п) и ((j + 1)/n, (k + 1)/n); стороны его параллельны Декартовым осям координат.
Для каждого прямоугольника (j, k) выбирается соответствующий прямоугольник того же размера в выходном изображении, как это определяется производителем. Этот прямоугольник имеет диагонально противоположные углы с реальными координатами (pjkn, qjkn) и ((pjk + 1)/n, (qjk + 1/n), где 0 ≤ pjk ≤ n - 1 и 0 ≤ qjk ≤ n - 1; стороны его параллельны Декартовым осям координат. Соответствие между прямоугольниками во входном и выходном изображениях может устанавливаться заново для каждого прямоугольника, но должно оставаться постоянным для каждого тестового изображения. Рисунок 2 иллюстрирует четыре из 64 прямоугольников с показанными смещениями выхода для случая, когда X = 1280 и Y = 1024.
6.2.4.4 Предопределенные тестовые изображения
Имеется три тестовых изображения, которые специально созданы для работы по методу испытания согласно 6.2.4.3 так, чтобы позволить ему удовлетворять целям испытания (см. 6.2.4.1). Как таковые они не годятся для использования ни в каком другом испытании, выполняемом согласно данным техническим условиям.
Требуется, чтобы все испытания по 6.2.4.4 и 6.2.4.5 проводились на тестовых изображениях 1, 2 и по меньшей мере на трех примерах тестового изображения 3.
6.2.4.4.1 Тестовое изображение 1
Оно должно состоять из наложенных горизонтальных и вертикальных полос красного (r = 1, g = 0, b = 0), зеленого (r = 0, g = 1, b = 0), голубого (r = 0, g = 0, b = 1) и черного (r = 0, g = 0, b = 0) цветов. Цвета полос должны представлять собой повторяющуюся последовательность: красный, черный фиксированной ширины, зеленый, черный фиксированной ширины, голубой и черный переменной ширины. Цвет на пересечениях горизонтальных и вертикальных полос должен соответствовать таблице 5.
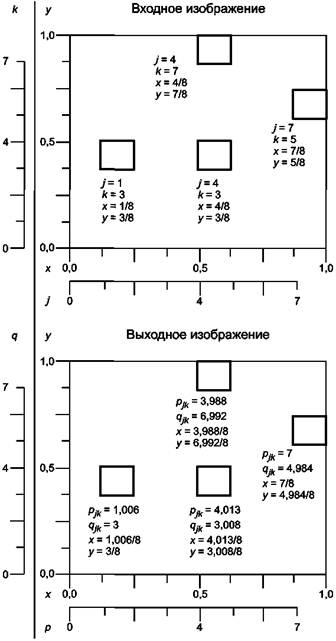
Рисунок 2 - Сравнение изображений
Таблица 5 - Цвета на пересечениях для тестовых изображений 1 и 2
|
Красный |
Зеленый |
Голубой |
Черный |
|
|
Красный |
красный |
зеленый |
голубой |
красный |
|
Зеленый |
красный |
зеленый |
голубой |
зеленый |
|
Голубой |
красный |
зеленый |
голубой |
голубой |
|
Черный |
красный |
зеленый |
голубой |
черный |
Красная, зеленая, голубая и фиксированная черная полосы должны иметь ширину в один пиксель, а ширина переменных черных полос должна быть разной в разных местах изображения.
Ширина вертикальных переменных черных полос должна равняться наименьшему целому числу, большему, чем значение выражения
(0,5 + |sin(2πx/X)X/20|),
где х есть иксовая координата левого края полосы.
Ширина горизонтальных переменных черных полос должна равняться наименьшему целому числу, большему, чем значение выражения
(0,5 + |sin(27πy/Y)Y/15|),
где y есть игрековая координата верхнего края полосы.
6.2.4.4.2 Тестовое изображение 2
Оно должно быть идентично тестовому изображению 1 с той лишь разницей, что выражения для ширины вертикальной и горизонтальной переменных черных полос должны быть
(0,5 + |cos(2πx/X)X/20) и (0,5 + |cos(2πy/Y)Y/15|) соответственно.
6.2.4.4.3 Тестовое изображение 3
Оно должно представлять собой пакетизированный, псевдослучайный набор пикселей, имеющих различные цвета. Каждое изображение должно генерироваться по следующему алгоритму:
a) псевдослучайным образом выберите значение для I так, чтобы I было действительным числом в диапазоне -1/8 ≤ I ≤ 1/8;
b) для каждой из переменных р, у и β псевдослучайно распределите вероятности 0,78; 0,16; 0,04 и 0,02 для каждого из чисел: 1/8, 3/8, 5/8 и 7/8;
c) для каждого пикселя изображения псевдослучайным образом выберите значение для каждой из переменных р, у и рс распределенными вероятностями от чисел 1/8, 3/8, 5/8 и 7/8;
d) для каждого пикселя установите r = I + р, g = I + y и b = I + β.
6.2.4.5.1 Метод испытания
Для каждой пары (i) входных и выходных пикселей в пределах каждого входного и выходного прямоугольника, каждый из которых содержит (α) таких пикселей, ошибка цвета (Cεj) выражается как
Cεj = [u(r(in)i - r(out)i)2 + v(g(in)l - g(out)i)2 + w(b(in)i - b(out)i)2]1/2,
где и = 0,089401, v = 0,344569 и w = 0,012996 есть квадраты весов согласно МСЭ для преобразования значений RGB в значения сигнала яркости.
Тогда тестовая мера цвета (ТМС) равна
![]()
6.2.4.5.2 Требуемые результаты
Необходимо, чтобы ТМС ≤ 0,05 для каждого из n2 прямоугольников изображения.
Для каждого из n2 прямоугольников входного тестового изображения, имеющих свои углы в j, k, должен существовать соответствующий выходной прямоугольник, нижний левый угол которого находится в pjk, qjk, что было задано производителем. Возможно (хотя и не обязательно), будет иметь место выходной прямоугольник, дающий наименьшее значение ТМС. Это будет тот прямоугольник, который пройдет испытание согласно 6.2.4.5.
Все ошибки положения являются функциями от некоторых переменных из набора j, k, pjk и qjk. Методика испытания состоит в том, чтобы рассматривать пары точек данных j, pjk и k, qjk, таких, что для каждого из n значений переменной k существует n множеств j, pjk, а для каждого из n значений переменной j существует n множеств k, qjk.
Множество j, pjk определяет любые горизонтальные ошибки положения, а множество k, qjk - любые вертикальные ошибки положения.
6.2.4.6.1 Горизонтальные ошибки положения
6.2.4.6.1.1 Метод испытания
Для каждого из n значений переменной k на входном изображении будет существовать строка прямоугольников, у которых левая сторона определена через n возможных значений переменной j. Для удобства и последовательности нововведения зададим i = j, х = j/n и y = pjk/n.
При отсутствии ошибок положения имеет место yi = хi по всем i для линейного уравнения уi = mх + с, где m = 1 и с = 0. При наличии горизонтальных ошибок положения этого не наблюдается. В этом случае будет существовать некоторая линия оптимального приближения, имеющая форму у = mх + с, такая, что некоторые точки данных лежат вне этой линии. Методика испытания состоит в том, чтобы задать ограничения на значения тис (чтобы ограничить линейные смещения и масштабирование), а также на величину, на которую точки данных могут удаляться от этой линии (чтобы ограничить нелинейности).
Возможные ошибки состоят в том, что изображение может масштабироваться с некоторым постоянным масштабным множителем (m ≠ 1), сдвигаться на некоторую постоянную величину (с ≠ 0) или смещаться по-разному в различных местах изображения.
Если y = mх + с есть линия оптимального приближения, будет существовать n значений у, которые имеют горизонтальную ошибку
Xεi = |mxi + c - xi|.
Тестовая мера линейности по оси Х(TМx) есть среднее значение по всем Xεi, таким, что 0 ≤ i = j ≤ n - 1
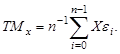
6.2.4.6.1.2 Требуемые результаты
Требуется, чтобы 0,99 ≤ m + с ≤ 1,01 и чтобы -0,01 ≤ с ≤ 0,01 для каждого из n строк прямоугольников с индексом k.
Требуется, чтобы ТМx ≤ 0,002 для каждого из n строк прямоугольников с индексом k.
Кроме того, нежелательно иметь разрывы в изображении, для чего требуется, чтобы |(mхi + с - уi) - (mхi - 1 + с - уi + 1)| ≤ 0,005 для всех значений i,
0 ≤ i = j ≤ n - 2.
Примечание - Для большей ясности выражение для непрерывности не упрощалось.
6.2.4.6.2 Вертикальные ошибки положения
6.2.4.6.2.1 Метод испытания
Для каждого из n значений переменной y на входном изображении будет существовать строка прямоугольников, у которых нижняя сторона определена через n возможных значений переменной k. Для удобства и последовательности нововведения зададим i = k, x = k/n и y = qjk/n.
В остальном анализ и метод испытания не отличаются от использованных для горизонтальных ошибок.
При
отсутствии ошибок положения имеет место ![]() , по всем i для линейного
уравнения
, по всем i для линейного
уравнения ![]() где m = 1 и с =
0. При наличии вертикальных ошибок положения этого не наблюдается. В этом
случае будет существовать некоторая линия оптимального приближения, имеющая
форму у = mх + с, такая, что
некоторые точки данных лежат вне этой линии. Методика испытания состоит в том,
чтобы задать ограничения на значения тис (чтобы ограничить линейные смещения и
масштабирование), а также на величину, на которую точки данных могут удаляться
от этой линии (чтобы ограничить нелинейности).
где m = 1 и с =
0. При наличии вертикальных ошибок положения этого не наблюдается. В этом
случае будет существовать некоторая линия оптимального приближения, имеющая
форму у = mх + с, такая, что
некоторые точки данных лежат вне этой линии. Методика испытания состоит в том,
чтобы задать ограничения на значения тис (чтобы ограничить линейные смещения и
масштабирование), а также на величину, на которую точки данных могут удаляться
от этой линии (чтобы ограничить нелинейности).
Возможные ошибки состоят в том, что изображение может масштабироваться с некоторым постоянным масштабным множителем (m ≠ 1), сдвигаться на некоторую постоянную величину (c ≠ 0) или смещаться по-разному в различных местах изображения (mi ≠ mi + 1 или сi ≠ сi + 1 для всех i).
Если y = mx + с есть линия оптимального приближения, то будет существовать n значений y, которые имеют вертикальную ошибку
Xεi = |mxi + c - xi|.
Тестовая мера линейности по Yi(ТМy) есть среднее значение по всем Yεj, так что 0 ≤ i = k ≤ n - 1
6.2.4.6.2.2 Требуемые результаты
Требуется, чтобы 0,99 ≤ m + с ≤ 1,01 и чтобы -0,01 ≤ с ≤ 0,01 для каждого из n столбцов прямоугольников с индексом j.
Требуется, чтобы TMY ≤ 0,002 для каждого из n столбцов прямоугольников с индексом j.
Кроме того, поскольку было бы нежелательно иметь разрывы в изображении, требуется, чтобы |(mхi + c - yi) - (mxi - 1 + c - yi + 1) ≤ 0,005 для всех значений i, 0 ≤ i = k ≤ n - 2.
Примечание - Для большей ясности выражение для непрерывности не упрощалось.
6.2.4.7.1 Метод испытания
Необходимо записать серию изображений от радиолокатора, отвечающего всем стандартам серии МЭК 60936 и требованиям 4.6.7, в том числе имеющих небольшие группы изолированных пикселей.
Их необходимо воспроизвести параллельно с исходными изображениями. Компетентный специалист должен сравнить исходное и записанное изображения.
6.2.4.7.2 Требуемые результаты
Требуется, чтобы, согласно профессиональному мнению компетентного специалиста, исходное и записанное изображения были идентичны во всех эксплуатационных аспектах.
Основные аварийные сигналы:
- команда на руль и реакция;
- команды для двигателя и реакции;
- состояние проемов (дверей) в корпусе;
- состояние водонепроницаемых и противопожарных дверей;
- ускорения и напряжения в корпусе;
- скорость и направление ветра (см. 4.6.8 - 4.6.15).
6.2.5.1 Метод испытания
По всем составляющим 6.2.5 метод испытания и требуемые результаты идентичны.
Ввести элемент за элементом, данные согласно формату, указанному в 4.3.5, через порты, предназначенные для конкретных элементов. Ввод данных должен производиться со скоростью, большей чем 1 раз в секунду, а изменяться - со скоростью, меньшей чем 1 раз в секунду. Записать данные за 30 минут. Воспроизвести данные.
6.2.5.2 Требуемые результаты
Все измененные данные должны быть точно воспроизведены со скоростью по меньшей мере 1 раз в секунду.
6.2.6 Интерфейсы (см. 4.3.5)
Производитель должен продемонстрировать, что все интерфейсы соответствуют требованиям 4.3.5.
Приложение А
(обязательное)
Таблица А.1 - Ссылки в данном стандарте
|
Записываемые параметры |
Подраздел(ы) |
Форматтер предложения |
Примечания |
|
Дата и время |
ZDA |
||
|
Положение судна и используемая точка отсчета |
GNS и DTM |
||
|
Скорость (относительно воды и/или земли) |
VBW |
||
|
Курс (истинный) |
THS, HDT |
Примечание 1 |
|
|
Курс (магнитный) |
HDG |
||
|
Глубина (по эхолоту) |
DPT |
||
|
Аварийные сигналы |
ALR, ALA, FIR, WAT |
Примечание 2 |
|
|
Команда на руль и реакция (вручную) |
RSA |
Примечание 3 |
|
|
Команда на руль и реакция (автоматически) |
HTC, HTD |
||
|
Команды для двигателя и реакции |
ETL, PRC, TRC, TRD, RPM, XDR |
Примечания 2 и 4 |
|
|
Проемы в корпусе, водонепроницаемые двери |
DOR, GEN, XDR |
Примечания 2 и 4 |
|
|
Ускорения и напряжения в корпусе |
HSS, XDR, ALR |
Примечание 2 |
|
|
Скорость и направление ветра 1 |
MWV |
||
|
Выход аварийного сигнала регистратора |
ALR |
Примечание 5 |
|
|
Примечание 1 - HDT не рекомендовано в связи с появлением в третьей редакции МЭК 61162-1 предложения THS, повышающего безопасность. Примечание 2 - В МЭК/PAS 61162-02 определяются предложения специально для VDR и S-VDR. Они теперь включены в третью редакцию МЭК 61162-1. Примечание 3 - В настоящее время спецификация RSA не имеет полей для «команды» - только для «реакции». Примечание 4 - Таблица датчиков-преобразователей в нынешней спецификации XDR не включает в себя явным образом эти варианты применения. Примечание 5 - Не выдвигается требование, чтобы VDR посылал аварийные сообщения. Если это применяется в виде дополнительной возможности, то в качестве форматтера предложения используется ALR. |
|||
Приложение В
(справочное)
Обязательные аварийные сигналы
Резолюция ИМО А.861 требует (в 5.4.9) вести запись «обязательных аварийных сигналов на ходовом мостике». Четкое определение этой фразы не приведено ни в каких опубликованных технических условиях или рекомендациях ИМО. Приводимый ниже список был составлен Техническим комитетом МСЭ 80 и обсуждался с представителями ИМО (см. поясняющие примечания к таблицам В.1 и В.2).
Таблица В.1 - Правовой акт ИМО: Международная Конвенция об охране человеческой жизни на море (SOLAS), Глава II-11
|
Статья ИМО |
Функция |
Тип сигнала |
Примечания |
|
|
1 |
29.5.2; 30.3 |
Блоки питания основного и вспомогательного рулевого механизма |
Звуковой + Визуальный |
Сбой питания на любом блоке питания рулевого механизма. Работа устройств для защиты от короткого замыкания, перегрузки, потери фазы в трехфазной системе |
|
2 |
29.8.4 |
Система управления основного и вспомогательного рулевого механизма |
Звуковой + Визуальный |
Сбой питания системы управления |
|
3 |
29.12.2 |
Рулевой механизм, низкий уровень рабочей жидкости |
Звуковой + Визуальный |
Низкий уровень жидкости в резервуаре для рабочей жидкости |
|
4 |
31.2.7; 49.5 |
Сбой системы дистанционного управления энергетической установки |
Звуковой + Визуальный |
Для судов с управлением энергетической установкой с ходового мостика и с укомплектованным командой машинным отделением; сбой дистанционного управления энергетической установки |
|
5 |
31.2.9; 49.7 |
Низкое давление воздуха для запуска энергетической установки |
Звуковой + Визуальный |
Суда - как в п. 4. Низкое давление воздуха для запуска, но продолжение запуска энергетической установки возможно |
|
6 |
52 |
Автоматическое выключение энергетической установки |
Суда, на которых машинное отделение периодически работает в безвахтенном режиме. Отключение энергетической установки и другого оборудования по причине серьезной неисправности |
|
|
7 |
51.1.3 |
Сбой, требующий действий или внимания вахтенного офицера |
Звуковой + Визуальный |
Суда - как в п. 6 |
|
8 |
51.2.2 |
Сбой обычного питания системы аварийной сигнализации |
Звуковой + Визуальный |
Суда - как в п. 6. Сбой обычного питания системы аварийной сигнализации |
|
9 |
15.7.3.12 |
Низкий уровень рабочей жидкости в системе управления водонепроницаемых дверей |
Звуковой + Визуальный |
Пассажирские суда постройки 01 февраля 1992 г. и позднее с гидравлическим управлением раздвижных водонепроницаемых дверей. Низкий уровень рабочей жидкости в резервуаре |
|
10 |
15.7.3.12 |
Водонепроницаемые двери, низкое давление газа, потеря запасов энергии |
Звуковой + Визуальный |
Суда - как в п. 9. Низкое давление газа или потеря запасов энергии в работающем гидравлическом аккумуляторе |
|
11 |
15.7.82 |
Водонепроницаемые двери, исчезновение электропитания |
Звуковой + Визуальный |
Суда - как в п. 9. Исчезновение питания для работы системы управления |
|
12 |
21.1.6.22 |
Аварийный сигнал - высокий уровень воды |
Звуковой + Визуальный |
Высокий уровень воды в пространстве, куда производится дренаж воды из грузового трюма или палубы надводного борта |
|
13 |
23-2.12 |
Индикатор положения лацпорта |
Трейлерные (ро-ро) пассажирские суда. Лацпорт открыт или запорное устройство не зафиксировано. Система должна иметь переключатель «море/гавань». Система активна в режиме «море» |
|
|
14 |
23-2.22 |
Индикатор детектора протекания воды |
Звуковой + Визуальный |
Суда - как в п. 13. Протекание воды в ро-ро грузовой трюм или специальные пространства через лацпорт |
|
1 Эти таблицы не включают в себя аварийных сигналов, отдельно обозначенных для специализированных судов, таких как газовозы, рыболовные суда, суда с ядерной двигательной установкой, скоростные суда или плавучие блоки для шельфовых платформ. 2 Применимо для судов, построенных 01 февраля 1992 г. и позже. |
||||
Таблица В.2 - Правовой акт ИМО: SOLAS, Глава II-21
|
Статья ИМО |
Функция |
Тип сигнала |
Примечания |
|
|
15 |
5.3.4.33 |
Локальное автоматическое освобождение халона |
Звуковой + Визуальный |
Активизация системы освобождения халона |
|
16 |
11.8 14.2 |
Обнаружение огня в автоматизированном или дистанционно управляемом машинном отделении |
Звуковой + Визуальный |
Активизация системы обнаружения |
|
17 |
12.1.2 12.1.2.13 12.1.2.2 13.1.53 13.1.6 |
Обнаружение огня или автоматическое срабатывание спринклера (разбрызгивателя) |
Звуковой + Визуальный |
Активизация спринклера или системы обнаружения огня. Также дополнительный аварийный сигнал для индикации сбоя или исчезновения питания в одной из этих систем |
|
18 |
13-1.1.32 |
Исчезновение питания системы обнаружения дыма |
Звуковой + Визуальный |
Система обнаружения дыма путем отбора образцов. Сбой питания в системе |
|
19 |
13-1.4.62, 3 |
Обнаружение дыма |
Оборудование - как в п. 18. Активизация системы |
|
|
20 |
5.3.3.83 |
Потери в контейнерах системы халона |
Звуковой + Визуальный |
Падение давления газа в контейнерах |
|
21 |
5.3.3.23 |
Система халона - сбой в электроцепи или исчезновение питания |
Звуковой + Визуальный |
Сбой электропитания в цепях, соединяющих контейнеры для выпуска газа |
|
22 |
5.3.3.33 |
Система халона - потери давления в пневматике или гидравлике |
Потери давления в контуре пневматики или гидравлики для выпуска газа |
|
|
1 Эти таблицы не включают в себя аварийных сигналов, отдельно обозначенных для специализированных судов, таких как газовозы, рыболовные суда, суда с ядерной двигательной установкой, скоростные суда или плавучие блоки для шельфовых платформ. 2 Применимо для судов, построенных 01 февраля 1992 г. и позже. 3 Эти сигналы могут быть опущены, если они предусмотрены на центральной станции пожаротушения. |
||||
Таблица В.3 - Правовой акт ИМО: Резолюция А.481
|
Номер |
Статья ИМО |
Функция |
Тип сигнала |
Примечания |
|
23 |
Приложение 2, подраздел 7.3 |
Аварийное оповещение персонала |
Звуковой + Визуальный |
В целях безопасности. Для персонала, находящегося в одиночку на вахте в машинном отделении или входящего туда в одиночку |
Приложение С
(обязательное)
Оборудование для извлечения и воспроизведения данных для органов следствия
С.1 Интерфейс вывода данных (MSC.214(81) 8.1)
Регистратор должен быть оснащен интерфейсом для извлечения сохраненных данных на внешний компьютер. Это должен быть либо интерфейс Ethernet, либо интерфейс USB.
С.1.1 Порт данных
Порт данных должен быть легко доступным и иметь обозначение: «Data» (данные) или, если он расположен на удалении от регистратора, - «VDR-Data» (данные регистратора).
С.1.2 Длина кабеля
Интерфейс должен предусматривать по меньшей мере 3-метровый кабель для соединения с внешним компьютером.
С.1.3 Интерфейс Ethernet
Если интерфейс - типа Ethernet, он должен соответствовать протоколу
IEEE 802.3u, разъем типа RJ 45.
Примечание - Поскольку интерфейс может потребовать либо прямого, либо перекрестного соединения в зависимости от сетевой архитектуры регистратора, специалистам-следователям могут понадобиться соответствующие адаптеры.
С.1.4 Интерфейс USB
Если интерфейс - типа USB, он должен соответствовать спецификации USB 2.0, гнездо типа А.
С.2 Программное обеспечение для извлечения, воспроизведения и преобразования данных
С.2.1 Общие сведения
С.2.1.1 Предоставление программного обеспечения (MSC.214(81) 8.2.1, 8.2.2)
Копия любой требующейся внешней компьютерной программы, позволяющей:
- извлекать сохраненные данные,
- воспроизводить информацию на подсоединенном внешнем портативном компьютере и
- преобразовывать данные в открытые промышленные стандарты, - должна поставляться для каждой установки регистратора:
a) сохраненной в электронном виде в памяти регистратора; причем в этом случае должна иметься возможность ее извлечения через выходной интерфейс данных, или
b) записанной на CD-ROM, DVD или USB-памяти, или
c) путем некоторой комбинации вариантов а) и b).
С.2.1.2 Совместимость программного обеспечения (MSC.214(81) 8.2.2)
Указанное программное обеспечение должно быть совместимым с какой-либо операционной системой для компьютеров, продаваемых через торговую сеть.
С.2.1.3 Пользовательская лицензия
Следственные органы должны иметь возможность пользоваться этими программами без лицензии.
С.2.1.4 Драйверы, инструментальные средства и т.п.
Указанное программное обеспечение должно включать в себя все необходимые драйверы, инструментальные средства и т.п., которые могут понадобиться для установки и работы программ на портативном компьютере.
С.2.1.5 Компьютеры и системное программное обеспечение
Производитель должен объявить, что все необходимое внешнее программное обеспечение может работать на имеющихся в продаже компьютерах и таком же системном программном обеспечении, а также должен задокументировать соответствующие требования.
С.3 Программное обеспечение для извлечения
Программное обеспечение для извлечения должно осуществлять передачу с регистратора через выходной порт данных на внешний портативный компьютер:
- данных, записанных регистратором, что, как минимум, должно включать в себя сохраненные данные (см. 4.5.1) и
- информацию о конфигурации (см. 4.4.2).
С.3.1 Программное обеспечение для воспроизведения
Программное обеспечение для воспроизведения, будучи установленным на внешний портативный компьютер, должно обеспечивать воспроизведение информации, содержащейся в извлеченных данных; таким образом оно представляет собой компонент воспроизводящего оборудования (см. подраздел 3.1.6).
С.3.2 Программное обеспечение для преобразования (MSC.214(81) 8.2.5)
Если для данных, извлекаемых с регистратора, используются нестандартные или частные форматы, необходимо предусмотреть программное обеспечение для преобразования этих данных в следующие открытые промышленные стандартные форматы:
С.3.2.1 Данные цифровых датчиков и конфигурационная информация
Данные цифровых датчиков и конфигурационная информация должны быть представлены в распечатываемом формате ASCII в виде текстовых файлов, соответствующих ИСО/МЭК 8859-1:1998.
Примечание 1 - Формат данных стандарта МЭК 61162-1 - это один из примеров приемлемого формата ASCII.
Примечание 2 - Данные могут быть запакованы в «.zip» формат, из-за чего они не рассматриваются как личные.
С.3.2.2 Видеоданные экрана радиолокатора
Видеоданные должны быть представлены в одном из следующих форматов:
«.bmp» - (Microsoft GDI - растровый эталон),
«.png» - (ИСО/МЭК 8859-1) или
«.jpg» - (JPEG 2000 - ИСО/МЭК 15444).
Примечание - Данные могут быть запакованы в «.zip» формат, из-за чего они не рассматриваются как личные.
С.3.2.3 Аудиоданные
Аудиоданные должны быть представлены в формате «.wav» (PCM WAVE) (EBU 3858).
С.3.2.4 Именование файлов
Имена файлов данных, представленных в открытых промышленных стандартах, должны отвечать следующим соглашениям по синтаксису:
YYMMDD.hhmmss.NN, ????????.nnn
Примечание - Пробелы вводиться не должны.
Здесь:
YYMMDD - год (две последние цифры), месяц и число месяца
Hhmmss - часы, минуты и секунды
NN - в зависимости от типа файла:
- Аудио: идентификатор согласно 4.4.2, е и 4.4.2, f),
- Видеофайлы: идентификатор согласно 4.4.2, g),
- Файл данных: «DD»,
- Конфигурационный файл согласно подразделу 4.4.2: «CF»
???????? - номер судна в системе ИМО
nnn - тип файла
Дата и время должны указываться по универсальному всемирному координированному времени и относиться к началу содержимого файла.
С.4 Извлечение данных
С.4.1 Воздействие на данные и работу регистратора
Процесс извлечения не должен никак влиять на хранящиеся в регистраторе данные, а операция записи, определенная настоящим стандартом, должна продолжаться и во время извлечения.
С.4.2 Многократные извлечения
Должна иметься возможность извлекать одни и те же сохраненные данные несколько раз.
С.4.3 Стирание данных
Не должно иметься возможности стирать данные из памяти регистратора в ходе извлечения данных.
С.4.4 Требуемое время
Период времени для извлечения 12-часового набора данных, включающего все данные согласно разделу 4.6 данного стандарта, не должен превышать 2,5 часа, включая:
- подсоединение кабеля к порту данных,
- извлечение требуемой программы и/или инструкций,
- извлечение 12-часового набора данных (сохраненный набор данных или копия текущего кадрового (FRM) набора данных) и
- извлечение конфигурационной информации.
С.4.5 Множественные наборы данных
Если для регистратора имеется возможность сохранять несколько 12-часовых наборов данных, программа извлечения должна предоставлять пользователю возможность выбрать набор(ы) для извлечения.
С.5 Инструкции (MSC.214(81) 8.2.3)
Необходимо предусмотреть инструкции по подсоединению внешнего портативного компьютера к регистратору и по работе с программным обеспечением.
С.5.1 Базовые и подробные инструкции
Если подробные инструкции поставляются в электронном виде, то, по крайней мере, основные инструкции по подсоединению внешнего компьютера и по получению представления подробных инструкций должны иметься в печатном виде. Подробные инструкции должны быть также включены в руководство по эксплуатации и обслуживанию или в специальное руководство органов следствия.
С.6 Упаковка и хранение (MSC.214(81) 8.2.4)
Инструкции (по крайней мере, основные инструкции), переносное запоминающее устройство с программным обеспечением, если оно требуется, а также любые специальные (т. е. отличные от обычных, продаваемых в торговой сети) детали, необходимые для физического подсоединения к внешнему портативному компьютеру, должны:
- содержаться в отдельном контейнере, должным образом запечатанном и имеющем маркировку:
«DO NOT OPEN important material for the exclusive use by Investigation Authorities» «HE ОТКРЫВАТЬ содержит важные материалы, предназначенные только для следственных органов»
- храниться в упаковке основного блока регистратора или быть надежно прикреплены к нему.
Приложение
D
(справочное)
Требования и методики испытаний - перекрестные ссылки
Таблица D.1 - Перечень предметов и подразделов
|
Предмет |
Подраздел требований |
Подраздел методики испытаний |
|
Конструкция и устройство |
||
|
Последовательные записи |
||
|
Привязка по дате и времени |
||
|
Защитная капсула |
(4.3.4.1, 4.3.4.2, 4.3.4.3 в МЭК 61996) |
|
|
Конструкция |
(4.3.4.3.1, 5.2, 5.4 в МЭК 61996) |
|
|
Видимость и маркировка |
(4.3.4.3.2 в МЭК 61996) |
|
|
Средства обнаружения |
(4.3.4.3.3, 5.3 в МЭК 61996) |
|
|
Оценка состояния носителя записи |
(4.3.5 в МЭК 61996) |
|
|
Интерфейсы |
4.3.5, 5.5.1.5, 5.6.1, 5.7.1, 5.8.1 (4.3.6, 5.5.1.5, 5.6.1, 5.7.1, 5.8.1 в МЭК 61996) |
|
|
Выбор элементов данных |
||
|
Блок данных конфигурации |
(4.4.1 (параграф 2) в МЭК 61996) |
Нет. По умолчанию - 6.1.4 |
|
Защита от несанкционированного доступа |
(4.4.2 в МЭК 61996) |
|
|
Эксплуатация |
||
|
Сохранение, копирование |
4.5.1а, b, с, d |
Нет. По умолчанию - 6.1.4 |
|
Источник питания |
||
|
Резервный источник питания |
||
|
Период записи |
||
|
Элементы данных для записи |
||
|
Дата и время |
||
|
Местоположение судна |
||
|
Скорость |
||
|
Курс |
||
|
Аудиосистема ходового мостика |
||
|
Система аудиосвязи |
||
|
Радиолокатор |
||
|
Эхолот |
||
|
Основные аварийные сигналы |
||
|
Команда на руль и реакция |
||
|
Команды для двигателя и реакции |
||
|
Проемы в корпусе |
||
|
Водонепроницаемые и др. двери |
||
|
Ускорения и напряжения в корпусе |
||
|
Скорость ветра |
||
|
Привязка к дате и времени |
||
|
Конкретные конструктивные требования к защитной капсуле |
5.2, 4.3.4.3.3 |
|
|
Локационные маяки |
||
|
Сохранность данных |
||
|
Долговременное хранение |
||
|
После нештатной ситуации |
||
|
Документация |
||
|
Аудиосистема ходового мостика |
||
|
Система аудиосвязи |
||
|
Радиолокатор |
Приложение ДА
(справочное)
Таблица ДА.1
|
Обозначение ссылочного международного стандарта |
Степень соответствия |
Обозначение и наименование соответствующего национального стандарта |
|
МЭК 60068-2-27:1987 |
- |
* |
|
МЭК 60268-16:2003 |
- |
* |
|
МЭК 60945:2007 |
IDТ |
ГОСТ Р МЭК 60945-2007 Морское навигационное оборудование и средства радиосвязи. Общие требования. Методы испытаний и требуемые результаты испытаний |
|
МЭК 61097-2 |
- |
* |
|
МЭК 61097-2 |
- |
* |
|
МЭК 61162-1 |
- |
* |
|
МЭК 61162-2 |
- |
* |
|
МЭК 61260:1995 |
- |
* |
|
МЭК 61260:1995 |
- |
* |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - IDT - идентичный стандарт. |
||
Библиография
МЭК 60936-1:1999, Морское навигационное и радиосвязное оборудование и системы - Радиолокатор - Часть 1: Судовой радиолокатор - Требования по рабочим характеристикам - Методики и требуемые результаты испытаний
МЭК 60936-3:2002, Морское навигационное и радиосвязное оборудование и системы - Радиолокатор - Часть 3: Судовой радиолокатор со средствами графического отображения - Требования к рабочим характеристикам - Методики и требуемые результаты испытаний
МЭК 62388:2007, Морское навигационное и радиосвязное оборудование и системы - Судовой радиолокатор - Требования к рабочим характеристикам, методики и требуемые результаты испытаний
Резолюция ИМО А.689:1991, Испытания спасательных устройств
Резолюция ИМО MSC.214(81): Приложение 1 - Дополнения к рекомендациям по эксплуатационным требованиям к судовым регистраторам данных рейса (РДР) (Резолюция А.861 (20))
Резолюция ИМО:1974, Международная Конвенция об охране человеческой жизни на море (SOLAS), с дополнениями
Резолюция ИМО MSC.74(69): 1998, Приложение 4 - Модификация А.224 - Эксплуатационные требования к рабочим характеристикам эхолотов
Резолюция ИМО MSC.64(67):1996, Приложение 4 - Эксплуатационные требования к радиолокационному оборудованию
Резолюция ИМО А.424(Х1):1979, Эксплуатационные требования к гирокомпасам
Резолюция ИМО MSC.64(67):1996, Приложение 3 - Эксплуатационные требования к системам управления курсом
Резолюция ИМО А.526(13):1983, Эксплуатационные требования к индикаторам угловой скорости
Резолюция ИМО А.600(15):1987, Схема принятой в ИМО цифровой идентификации судов
Резолюция ИМО А.612(15):1987, Эксплуатационные требования к свободно всплывающим УКВ аварийным радиобуям - указателям местоположения
Резолюция ИМО А.658(16): Использование и установка светоотражающих материалов в спасательных устройствах
Резолюция ИМО А.662(16): Эксплуатационные требования к устройствам отделения и включения свободно всплывающего аварийного радиооборудования
Резолюция ИМО А.694(17): Общие требования к судовому радиооборудованию, входящему в Глобальную систему подачи сигналов бедствия и обеспечения безопасности на море (GMDSS), и к навигационным электронным средствам
Резолюция ИМО А.754(18):1993, Рекомендации по испытаниям на огнестойкость для перегородок классов «А», «В» и «F»
Резолюция ИМО А.803(19):1995, Эксплуатационные требования к судовым радиостанциям метрового диапазона, обеспечивающим передачу речевых сообщений и цифровой избирательный вызов
Резолюция ИМО А.805(19):1995, Эксплуатационные требования к свободно всплывающим УКВ аварийным радиобуям - указателям местоположения
Резолюция ИМО А.810(19): Эксплуатационные требования к свободно всплывающим спутниковым аварийным радиобуям для обнаружения места бедствия, работающим на частоте 406 МГц (EPIRBs)
Резолюция ИМО А.813(19):1995, Общие требования по электромагнитной совместимости (ЕМС) для всего электрического и электронного судового оборудования
Резолюция ИМО А.817(19):1995, Эксплуатационные требования к электронным картографическим навигационно-информационным системам (ECDIS)
Резолюция ИМО А.819(19):1995, Эксплуатационные требования к судовому приемному оборудованию Глобальной системы навигации и определения положения (GPS)
Резолюция ИМО А.823(19):1995, Эксплуатационные требования к средствам автоматической радиолокационной прокладки (ARPAs)
Резолюция ИМО А.824(19):1995, Эксплуатационные требования к измерителям скорости и расстояния
Резолюция ИМО А.830(19): Нормы и правила по аварийным сигналам и индикаторам
Резолюция ИМО А.861(20): Эксплуатационные требования к судовым регистраторам данных рейса (РДР)
Резолюция ИМО А.953(23):2003, Всемирная система радионавигации
ИСО 8728: Суда и корабельная технология - Судовые гирокомпасы
ИСО 11674: Суда и корабельная технология - Системы управления курсом
ИСО/МЭК 8859-1, Информационная технология- 8-битовые наборы графических символов однобайтной кодировки - Часть 1: Латинский алфавит № 1
ИСО/МЭК 15444, Информационная технология - Система кодирования изображения JPEG 2000
ИСО/МЭК 15948, Спецификация графического формата PNG (Второе издание): Информационная технология - Компьютерная графика и обработка изображений - Графический формат PNG: Функциональная спецификация
Европейский Телевещательный Союз, Техническая спецификация Tech 3858, BWF - формат для передаваемых в эфир аудиофайлов, Приложение А, формат файла RIFF WAVE (.WAV)
IEEE 802.3u: 1995, Стандарт для информационной технологии - Телекоммуникация и обмен информацией между системами - Локальные и региональные вычислительные сети - Особые требования - Часть 3
Библиотека сети для разработчиков, использующих платформу Microsoft (MSDN) - Интерфейс графических устройств Microsoft GDI - Растровый эталон - BMP
USB Implementers Forum Inc. (форум разработчиков USB) - Спецификация универсальной последовательной шины (USB) версии 2.0
Ключевые слова: судовой регистратор данных рейса, технико-эксплуатационные требования, методы испытаний, требуемые результаты