ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р МЭК |

Государственная
система обеспечения
единства измерений
ГИДРОФОНЫ
Общие
требования к методикам калибровки
в частотном диапазоне до 40 МГц
IEC 62127-2:2007
Ultrasonics - Hydrophones - Part 2: Calibration for ultrasonic fields up to 40
MHz
(IDT)
|
|
Москва Стандартинформ 2011 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Всероссийским научно-исследовательским институтом физико-технических и радиотехнических измерений Федерального агентства по техническому регулированию и метрологии на основе собственного аутентичного перевода на русский язык международного стандарта, разработанного МЭК/ТК 87 «Ультразвук», указанного в пункте 4
2 ВНЕСЕН Управлением метрологии Федерального агентства по техническому регулированию и метрологии
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. № 1041-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 62127-2:2007 «Ультразвук - Гидрофоны. Часть 2: Методы калибровки для измерения ультразвуковых полей на частотах до 40 МГц» (IEC 62127-2:2007 «Ultrasonics - Hydrophones - Part 2: Calibration for ultrasonic fields up to 40 MHz»)
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2004 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственная система обеспечения единства измерений
ГИДРОФОНЫ
Общие требования к методикам калибровки в частотном диапазоне до 40 МГц
State system for ensuring the uniformity of measurements.
Hydrophones.
General requirements for calibration methods in the frequency range up to 40
MHz
Дата введения - 2011-01-01
1 Область применения
Настоящий стандарт распространяется:
- на гидрофоны, используемые для измерений в водной среде в ультразвуковом диапазоне частот до 40 МГц;
- на гидрофоны с круглым пьезоэлектрическим чувствительным элементом, разработанные для измерений ультразвуковых полей импульсного или непрерывного излучения, генерируемого ультразвуковым оборудованием;
- на гидрофоны с предварительным усилителем или без него.
Настоящий стандарт устанавливает методы абсолютной и относительной калибровки гидрофонов, рекомендации по применению которых приведены в библиографии к настоящему стандарту.
Примечания
1 При применении ультразвука в медицине, например в физиотерапии, используют диапазон частот от 40 до 100 кГц, однако основной частотный диапазон ультразвуковой диагностики располагается выше 2 МГц. В настоящее время установлено, что на результаты измерения ключевых акустических параметров может влиять частотная характеристика гидрофона на существенно более низких частотах [1].
2 Некоторые типы гидрофонов могут иметь и некруглые чувствительные элементы, что связано, например, с небольшим отклонением от круговой симметрии формы электрода или с применением квадратных активных элементов. В этом случае при применении положений настоящего стандарта рекомендуется уделять особое внимание тому, что диаграмма направленности таких гидрофонов и эффективный радиус их активного элемента будут зависеть от направления оси поворота гидрофона.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
МЭК 60050-801:1994 Международный электротехнический словарь. Глава 801: Акустика и электроакустика (IEC 60050-801:1994, International Electrotechnical Vocabulary. Chapter 801. Acoustics and electroacoustics)
МЭК 60565:2006 Гидроакустика. Гидрофоны. Калибровка в частотном диапазоне от 0,01 Гц до 1 МГц (IEC 60565:2006, Underwater acoustics - Hydrophones - Calibration in the frequency range 0,01 Hz to 1 MHz)
МЭК 61161:2006 Ультразвук. Измерение мощности. Системы уравновешивания радиационной силы и требования к исполнению (IEC 61161:2006, Ultrasonics - Power measurement - Radiation force balances and performance requirements)
МЭК 61689:1996 Ультразвук. Физиотерапевтическое оборудование. Требования к рабочим характеристикам и методам измерения в диапазоне частот от 0,5 МГц до 5 МГц (IEC 61689:1996, Ultrasonics - Physiotherapy systems - Performance requirements and methods of measurement in the frequency range 0,5 MHz to 5 MHz)
МЭК 61828:2006 Ультразвук. Фокусирующие преобразователи. Определения и методы измерения параметров излучаемых полей (IEC 61828:2006, Ultrasonics - Focusing transducers - Definitions and measurement methods for the transmitted fields)
МЭК 62127-1:2007 Ультразвук. Гидрофоны. Часть 1: Измерение и описание медицинских ультразвуковых полей на частотах до 40 МГц. Поправка 1 (2008) (IEC 62127-1:2007, Ultrasonics - Hydrophones - Part 1: Measurement and characterization of medical ultrasonic fields up to 40 MHz. Corrigendum 1)
МЭК 62127-3:2007 Ультразвук. Гидрофоны. Часть 3: Свойства гидрофонов для измерения параметров ультразвуковых полей на частотах до 40 МГц (IEC 62127-3:2007, Ultrasonics - Hydrophones - Part 3: Properties of hydrophones for ultrasonic fields up to 40 MHz)
3 Термины, определения и обозначения
В настоящем стандарте применены термины, определенные в стандарте МЭК 62127-1, а также следующие термины с соответствующими определениями:
3.1 акустический центр: Точка на преобразователе или вблизи него, от которой распространяются излучаемые преобразователем сферически расходящиеся звуковые волны, наблюдаемые из достаточно удаленных точек, на которых это расхождение проявляется.
3.2 ось пучка: Прямая линия, проходящая через центральные точки пучка, принадлежащие двум плоскостям, перпендикулярным к прямой линии, соединяющей точку максимального интеграла квадратов давления в импульсе с центром внешней апертуры преобразователя.
Примечания
1 Положение первой из плоскостей определяется нахождением в ней точки с максимальным значением интеграла квадратов давления в импульсе (т.е. обычно фокуса). Вторая плоскость должна отстоять от первой как можно дальше и быть параллельной ей, а сканирование в ней должно осуществляться по тем же ортогональным осям x и y, что и в первой плоскости.
2 Во многих случаях термин «интеграл квадратов давления в импульсе» заменяют его линейными эквивалентами, например:
a) для непрерывноволнового излучения он может быть заменен термином «среднеквадратическое акустическое давление» [см. МЭК 61689];
b) если трудно достичь синхронизации измеряемого и излучаемого сигналов, то он может быть заменен термином «усредненная во времени интенсивность».
3 См. ГОСТ Р МЭК 62127-1, рисунок 1.
3.3 центральная точка пучка: Точка пересечения двух линий, соответствующих середине пучка в двух ортогональных плоскостях ху и yz [МЭК 61828].
3.4 ширина пучка w6, w12, w20, м: Наибольшее расстояние между двумя точками, лежащими на заданной оси, перпендикулярной к оси пучка, на которых интеграл квадратов давления в импульсе уменьшается по сравнению с его максимумом (на оси пучка) на определенное значение [см. МЭК 62127-1].
Примечания
1 Во многих случаях термин «интеграл квадратов давления в импульсе» заменяют его линейными эквивалентами, например:
a) для непрерывноволнового излучения он может быть заменен термином «среднеквадратическое акустическое давление» [см. МЭК 61689];
b) если трудно достичь синхронизации измеряемого и излучаемого сигналов, то он может быть заменен термином «усредненная во времени интенсивность».
2 Обычно используются значения ширины пучка на уровнях, равных минус 6 дБ, минус 12 дБ и минус 20 дБ. При этом децибел определяют как десять десятичных логарифмов отношения интегралов.
3.5 середина пучка: Усредненная линия, проходящая через точки половинных значений ширины пучка, лежащей в какой-то одной плоскости [МЭК 61828].
Примечание - Усреднение проводится по 20 значениям ширины пучка, соответствующим интервалам, лежащим в диапазоне от минус 0,1 дБ до минус 26 дБ, как это установлено в МЭК 61828.
3.6 центр пучка: Точка на плоскости, обычно перпендикулярной оси пучка в его дальнем поле, которая соответствует пространственному и временному пику акустического давления.
3.7 диаметральное сканирование пучка: Ряд измерений напряжения на выходе гидрофона при перемещении последнего вдоль прямой линии, проходящей через точку на оси пучка и в направлении, перпендикулярном к этой оси [МЭК 62127-1].
Примечание - Диаметральное сканирование пучка может распространяться на различные расстояния по разные стороны от оси пучка.
3.8 диаграмма направленности: Представление (обычно в графическом виде) зависимости чувствительности гидрофона на какой-либо заданной частоте от направления распространения падающей плоской звуковой волны в какой-либо заданной плоскости, проходящей через опорную точку [МЭК 60565].
3.9 эффективный радиус несфокусированного ультразвукового преобразователя at, м: Радиус идеального поршневого ультразвукового преобразователя в форме диска, имеющего расчетную осевую зависимость акустического давления, приблизительно эквивалентную наблюдаемой осевой зависимости акустического давления до расстояний, соответствующих последнему максимуму этой зависимости [МЭК 62127-1].
3.10 эффективный радиус гидрофона ah, ah3, ah6, м: Радиус гидрофона в виде жесткого диска, который имеет расчетную диаграмму направленности, угловой сектор которой равен угловому сектору измеренной диаграммы направленности рассматриваемого гидрофона [МЭК 62127-3].
Примечания
1 Угловой сектор определяют по определенному уровню снижения диаграммы направленности относительно ее максимального значения. Для определенных уровней снижения, равных 3 и 6 дБ, значения эффективного радиуса обозначают как ah3 и ah6.
2 Значения радиуса зависят от частоты. Типичные экспериментальные данные приведены в [2].
3.11 импеданс электрической нагрузки zL, Ом: Комплексное значение входного электрического импеданса (включающее реальную и мнимую части), к которому подключен или должен быть подключен выходной разъем кабеля гидрофона [МЭК 62127-3].
3.12 чувствительность на конце кабеля под нагрузкой; чувствительность гидрофона (или гидрофона с предусилителем) на конце кабеля под нагрузкой ML(f), В/Па: Отношение мгновенного значения электрического напряжения на конце постоянно подсоединенного кабеля или разъема гидрофона (или гидрофона с предусилителем), подсоединенных к электрическому импедансу нагрузки, к мгновенному акустическому давлению в свободном невозмущенном акустическом поле плоской волны в точке, соответствующей акустическому центру гидрофона, при условии отсутствия гидрофона в этой точке [МЭК 62127-3].
3.13 чувствительность холостого хода на конце кабеля; чувствительность холостого хода на конце кабеля гидрофона Mc(f), В/Па: Отношение мгновенного значения электрического напряжения холостого хода на конце постоянно подсоединенного кабеля или разъема гидрофона (или гидрофона с предусилителем) к мгновенному акустическому давлению в свободном невозмущенном акустическом поле плоской волны в точке, соответствующей акустическому центру гидрофона, при условии отсутствия гидрофона в этой точке [МЭК 62127-3].
3.14 внешняя апертура преобразователя: Часть поверхности преобразователя или группы элементов преобразователя, которая излучает ультразвук в среду распространения [МЭК 61828].
Примечание - Эта поверхность либо находится в непосредственном контакте с телом пациента, либо контактирует с ним через воду или другую жидкую среду (см. МЭК 62127-1, рисунок 1).
3.15 дальнее поле: Акустическое (звуковое) поле на тех расстояниях от ультразвукового преобразователя, на которых мгновенное значение акустического давления и колебательная скорость частиц практически совпадают по фазе [МЭК 60050-801].
Примечания
1 В дальнем поле волна акустического давления представляется сферически расходящейся от точки, лежащей на излучающей поверхности или вблизи нее. Поэтому давление, генерируемое источником звука, приблизительно обратно пропорционально расстоянию от этого источника.
2 Термин «дальнее поле» используется в настоящем стандарте только для несфокусированных преобразователей. Для сфокусированных применяют другие термины, различные для разных частей излучаемого поля (см. МЭК 61828).
3.16 свободное поле: Звуковое поле в гомогенной изотропной среде, в котором влиянием границ можно пренебречь [МЭК 60565].
3.17 гидрофон: Преобразователь, который генерирует электрические сигналы при воздействии на него акустических сигналов в воде [МЭК 60050-801].
3.18 гидрофон с предусилителем: Гидрофон, совмещенный с предварительным усилителем в одном корпусе [МЭК 62127-3].
3.19 ось гидрофона: Номинальная ось симметрии активного элемента гидрофона [МЭК 62127-3].
Примечание - Под осью гидрофона в настоящем стандарте подразумевается геометрическая ось симметрии гидрофона, если изготовителем гидрофона не установлено другое, более конкретное, определение.
3.20 геометрический радиус гидрофона аg, м: Радиус, определяемый размерами активного элемента гидрофона [МЭК 62127-3].
3.21 предварительный усилитель (предусилитель) гидрофона: Активное электронное устройство, которое соединяют с гидрофоном для снижения его выходного импеданса [МЭК 62127-3].
Примечания
1 Предусилитель гидрофона требует электрического питания.
2 Коэффициент усиления предусилителя гидрофона может быть и меньше 1, т.е. предусилитель может и не являться усилителем.
3.22 мгновенное значение акустического (звукового) давления р(t), Па: Разность между давлением, существующим в рассматриваемый момент времени в некоторой точке среды, и статическим давлением [МЭК 60050-801 и МЭК 62127-1].
3.23 мгновенное значение интенсивности I(f), Вт/м2: Акустическая энергия, проходящая за единицу времени в направлении распространения акустической волны через единичную площадь, перпендикулярную к этому направлению, в рассматриваемый момент времени в некоторой точке акустического поля.
Примечание - Мгновенное значение интенсивности является произведением мгновенных значений акустического давления и колебательной скорости. Измерить интенсивность в ультразвуковом диапазоне частот трудно. При измерении параметров в соответствии с настоящим стандартом в предположении существования условий дальнего поля мгновенное значение интенсивности I(t) выражается как
I(t) = p(t)2/ρc, (1)
где p(t) - мгновенное значение акустического давления, Па;
ρ - плотность среды распространения, кг/м3;
с - скорость звука в среде, м/с.
3.24 опорный центр: Точка на гидрофоне или вблизи него, относительно которой определяют акустическую чувствительность [МЭК 60565].
Примечание - В настоящем стандарте под опорным центром подразумевают геометрический центр излучающей поверхности активного элемента гидрофона, если изготовителем гидрофона не дано другое, более конкретное, определение.
3.25 неопределенность: Параметр, связанный с результатом измерений и характеризующий разброс значений, которые могли бы быть приписаны измеряемой величине [3].
4 Список обозначений
ah - эффективный радиус гидрофона (ah3, ah6: со ссылкой на его определение при минус 3 и минус 6 дБ соответственно);
аg - геометрический радиус гидрофона;
аmax - максимальное значение эффективного радиуса гидрофона при его каком-либо конкретном применении;
аР - поперечное расстояние от оси пучка (аР max Е, аР max H: максимальные значения, чтобы избежать интерференции с краевыми и поверхностными волнами соответственно);
at - эффективный радиус несфокусированного ультразвукового преобразователя;
Аg - геометрическая площадь ультразвукового преобразователя;
В/А - параметр нелинейности;
с - скорость звука в среде (обычно в воде);
СH - емкость на конце кабеля гидрофона (включая неразъемный кабель и разъем на его конце);
D(θ) - нормированная характеристика направленности;
е - основание натурального логарифма;
F - частота;
ff - основная частота возбуждения сигнала, используемого для генерации нелинейных искажений;
fu - верхняя граничная частота установленного частотного диапазона гидрофона;
Ip - амплитуда мгновенной интенсивности в предположении ее пропорциональности квадрату акустического давления;
![]() - вектор мгновенной интенсивности в
точке (x, y, z) в
момент времени t;
- вектор мгновенной интенсивности в
точке (x, y, z) в
момент времени t;
I(x, y, z, t) - компонент вектора мгновенной интенсивности в направлении распространения в точке (x, y, z) в момент времени t;
F - геометрическое фокусное расстояние фокусирующего преобразователя;
jmax - номер крайней точки сканирования при радиальном сканировании;
k - волновое число (= 2π/λ);
![]() - общее обозначение для
комплексного значения чувствительности гидрофона, где
- общее обозначение для
комплексного значения чувствительности гидрофона, где ![]() является
модулем, a
является
модулем, a ![]() - аргументом, т.е. его фазовым углом;
- аргументом, т.е. его фазовым углом;
Mc(f) - чувствительность холостого хода на конце кабеля;
ML(f) - чувствительность на конце кабеля под нагрузкой;
Nav - число усреднений волновой формы, взятое при воспроизведении усредненной во времени волновой формы напряжения;
N - число точек отсчета при диаметральном сканировании;
Nharm - число гармоник;
р0 - амплитуда давления;
р1 - амплитуда акустического давления на поверхности преобразователя;
р(x, y, z, t) - мгновенное значение акустического давления в точке (x, y, z) в момент времени t;
P(l) - полная мощность ультразвукового излучения, проходящего через бесконечную плоскость, установленную на расстоянии l от ультразвукового преобразователя;
Р0 - полная ультразвуковая мощность преобразователя;
rf - радиочастотные сигналы;
r - расстояние между центром ультразвукового пучка и точкой сканирования;
R - ![]() - расстояние между
преобразователем и гидрофоном, нормированное к Релеевскому расстоянию
- расстояние между
преобразователем и гидрофоном, нормированное к Релеевскому расстоянию ![]()
R1i, R2i - расстояния между центром ультразвукового пучка и крайними точками/-го диаметрального сканирования;
s - расстояние между центром ультразвукового пучка и ближайшей точкой сканирования;
tH - время прихода первичной волны;
tTDS - время, необходимое для измерений в условиях свободного поля методом спектрометрии временных задержек;
TF - акустический коэффициент прохождения;
UL(x, y, z, t) - электрическое напряжение на конце кабеля гидрофона в опорной точке (x, y, z) в момент времени t;
U'L(x, y, z, t) - электрическое напряжение на конце кабеля гидрофона, включающее его собственные шумы, в опорной точке (x, y, z) в момент времени t;
UN - среднеквадратическое значение шумов, измеренное гидрофоном в опорной точке (x, y, z);
UT - электрическое напряжение на разъеме ультразвукового преобразователя;
![]() -
вектор мгновенного значения колебательной скорости частиц в точке (x, y, z) в
момент времени t;
-
вектор мгновенного значения колебательной скорости частиц в точке (x, y, z) в
момент времени t;
vt - скорость радиальной волны в пластине преобразователя;
wf - ширина пучка по полю на основной частоте;
z - осевое расстояние между гидрофоном и поверхностью ультразвукового преобразователя (z1, z2, z3 и z4 - заданные значения расстояний с учетом влияния краевой и поверхностной волн);
zmin - минимальное расстояние от гидрофона конечных размеров до преобразователя;
zpf - фокусное расстояние (по давлению) фокусирующего преобразователя;
Δz - разность расстояний;
![]() -
комплексный электрический импеданс на выходе гидрофона;
-
комплексный электрический импеданс на выходе гидрофона;
![]() -
комплексный электрический импеданс нагрузки;
-
комплексный электрический импеданс нагрузки;
α - амплитудный коэффициент затухания плоской волны в среде (обычно воде);
β - параметр нелинейности, задаваемый в виде β = 1 + В/(2А);
δ - амплитуда второй гармоники, выраженная в процентах от акустического давления на основной частоте;
δav - поправка к амплитуде давления из-за конечного размера гидрофона;
Θ - угол между направлением распространения ультразвука и осью z, равный углу между линией, соединяющей центр ультразвукового преобразователя с центром гидрофона, и направлением распространения;
Θ1 - угол между линией, соединяющей центр ультразвукового преобразователя с центром гидрофона, и направлением максимальной чувствительности гидрофона;
γ - отношение радиуса пучка к эффективному радиусу гидрофона;
ζ - акустическое смещение, измеряемое оптическим интерферометром;
θ - угол падения ультразвуковой волны относительно оси гидрофона (θ3, θ6: на уровнях 3 и 6 дБ соответственно);
λ - длина ультразвуковой волны;
λ1 - длина световой волны;
ξ - умноженная на π/2
длина Релеевской волны (![]() по МЭК 61828) фокусирующего
преобразователя;
по МЭК 61828) фокусирующего
преобразователя;
ρ - плотность среды распространения (воды);
ρС - удельный акустический импеданс;
σ - параметр нелинейных искажений;
σт - параметр нелинейности распространения;
τ - длительность импульса или тонального импульса (τmax Е, τmax Н: максимальные значения для устранения интерференции с краевыми и поверхностными волнами соответственно);
ω - угловая частота.
5 Общее представление о методиках калибровки
5.1 Общие положения
Для измерений абсолютных значений параметров акустического поля требуются гидрофоны. Электрическое напряжение u(t) на выходе гидрофона как зависимость времени t может быть представлено в виде
u(t) = p(t)*m(t), (2)
где p(t) - волновая форма (зависимость от времени) давления;
* - операция свертки;
m(t) - импульсный отклик гидрофона.
При разложении в ряды Фурье, если U(f), P(f) и M(f) являются соответствующими преобразованиями Фурье, результирующий спектр напряжения можно получить равным P(f) ∙ M(f). Величина M(f) является функцией преобразования гидрофона (чувствительностью), и ее комплексное значение представляется как реальной, так и мнимой частями.
В соответствии с современной практикой измерений в настоящем стандарте гидрофоны рассматривают как элементы, чувствительные к амплитуде, а не к фазе сигнала. Тем не менее, есть определенные основания полагать, что фазовые измерения в будущем будут иметь более важное значение, в частности при применении методов обратной свертки (см. МЭК 62127-1), которые требуют комплексного представления функции преобразования гидрофона. Если это произойдет, то настоящий стандарт будет пересмотрен для установления более строгих требований к таким измерениям. Обзор существующих относительных фазовых измерений дан в приложении I.
Примечание - Под чувствительностью гидрофона в настоящем стандарте подразумевают действительное значение (выраженное отношением амплитуд).
Изложенные в настоящем стандарте методики калибровки гидрофонов основаны на двух принципиально различных подходах:
a) калибровка с применением эталонного преобразователя.
В этом случае гидрофон может быть откалиброван методом сравнения с эталонным преобразователем как источником ультразвуковой мощности. Выходная мощность преобразователя должна быть определена методом уравновешивания радиационной силы, изложенным в МЭК 61161;
b) калибровка без эталонного преобразователя, включающая:
1) калибровку методом взаимности, основанную на принципе взаимности, при этом, по крайней мере, один из используемых преобразователей должен быть взаимным;
2) физическую калибровку, при которой действующее на гидрофон звуковое давление рассчитывают по результатам измерений физических параметров, относящихся к акустическому полю, таких, например, как акустическое смещение в методе оптической интерферометрии.
Примечание - Под «абсолютной» калибровкой гидрофонов в настоящем стандарте понимают то, что она проводится без сравнения с чувствительностью другого гидрофона. Иногда пользуются также понятием «первичного» метода калибровки. С другой стороны, на практике часто используют «вторичный» метод или метод «замещения», которые предполагают сравнение с чувствительностью калиброванного опорного гидрофона. Сам опорный гидрофон может быть откалиброван «абсолютным» методом или с помощью другого эталонного гидрофона и т.д. Очевидно, что это две принципиально различные методики: выполнение абсолютной калибровки гидрофона или сравнение чувствительностей двух гидрофонов. Абсолютные методы изложены в разделах 9, 10 и 11, а также приложениях D, F и Н настоящего стандарта. Метод сравнения конкретизирован в разделе 12. Следует отметить, что методика замещения обычно предусматривает реализацию обоих методов, и желающему ею воспользоваться рекомендуется обратиться как к разделу 12, так и к другим разделам, относящимся к методам абсолютной калибровки, особенно если речь идет об оценке неопределенности результатов калибровки методом замещения, так как составляющими этой неопределенности будут вклады как абсолютных, так и относительных методов.
5.2 Обзор методик калибровки
Ниже указаны диапазоны частот, в которых может быть реализован тот или иной метод калибровки, а также раздел, в котором изложен соответствующий метод. В таблице 1 приведены типичные значения неопределенности результатов калибровки этими методами.
a) Калибровка методом взаимности в свободном поле:
- калибровка без использования эталонного преобразователя в свободном поле, в диапазоне частот от 50 кГц до 15 МГц; раздел 9.
b) Калибровка методом плоского сканирования в свободном поле:
- калибровка в свободном поле с эталонным преобразователем, в диапазоне частот от 500 кГц до 15 МГц; раздел 10.
c) Калибровка в свободном поле методом оптической интерферометрии:
- физическая калибровка при измерениях акустического смещения в свободном поле, в диапазоне частот от 200 кГц до 40 МГц; раздел 11.
d) Калибровка методом сравнения с использованием эталонного гидрофона:
- калибровка методом сравнения с использованием эталонного гидрофона, в диапазоне частот от 50 кГц до 40 МГц; раздел 12.
Таблица 1 - Перечень типичных значений неопределенности результатов калибровок методами, установленными в настоящем стандарте, в различных частотных диапазонах
|
Метод калибровки |
Диапазон частот |
Неопределенность, % |
|
|
9 |
Метод взаимности с двумя преобразователями (9.3.4) |
От 1 до 2 МГц |
6 |
|
До 10 МГц |
10 |
||
|
До 15 МГц |
16 |
||
|
Метод взаимности с тремя преобразователями (9.3.2) |
От 50 кГц до 100 кГц |
5 |
|
|
До 500 кГц |
6 |
||
|
До 1 МГц |
10 |
||
|
10 |
Метод плоского сканирования в свободном поле (приложение D) |
От 500 кГц до 10 МГц |
6 |
|
До 15 МГц |
18 |
||
|
11 |
Метод оптической интерферометрии в свободном поле (приложение F) |
От 200 кГц* до 1 МГц |
7 |
|
До 10 МГц |
7 |
||
|
До 20 МГц |
8 |
||
|
До 30 МГц |
10 |
||
|
До 40 МГц |
11 |
||
|
12 |
Метод сравнения с эталонным гидрофоном (12.5.2 и приложения G и Н) |
От 50 кГц до 200 кГц |
9 |
|
До 1 МГц |
8 |
||
|
До 10 МГц |
7 |
||
|
До 20 МГц |
11 |
||
|
До 30 МГц |
12 |
||
|
До 40 МГц |
12 |
||
|
* Нижняя частота диапазона 200 кГц определяется не возможностями метода оптической интерферометрии, а влиянием отражений от стенок бассейна и элементов конструкции гидрофона. |
|||
5.3 Представление результатов калибровки
Чувствительность на конце кабеля гидрофона с предусилителем должна быть выражена в В/Па, или в кратных дольных единицах, или в виде логарифмических уровней в децибелах с указанием опорного значения чувствительности. Должно быть указано, является ли значение чувствительности чувствительностью холостого хода на конце кабеля или чувствительностью на конце кабеля под нагрузкой. В последнем случае следует указать условия нагрузки, т.е. ее электрический импеданс, чтобы обеспечить указанное значение чувствительности.
Примечание - Понятие «конец кабеля» относится к выходному разъему кабеля гидрофона как с предусилителем, так и без него.
Должна быть приведена неопределенность результата измерения чувствительности. Если чувствительность приведена в каком-либо интервале частот, то и неопределенность должна относиться к тому же самому интервалу. Если чувствительность указана в виде набора значений для отдельных значений частот, то неопределенность рекомендуется давать в тех частотных интервалах, которые интересуют пользователя (гидрофона).
Примечание - Руководство по оценке неопределенности приведено в приложении А.
Должен быть установлен интервал частоты, в котором указывают чувствительность с оценкой неопределенности ее получения. В соответствии с настоящим стандартом значения чувствительности и неопределенности результатов калибровки могут быть приведены отдельно и в установленных интервалах частот. Частотная характеристика чувствительности гидрофона может быть представлена как в абсолютных значениях, так и в относительных единицах - относительно абсолютного значения чувствительности на какой-либо заданной частоте. В последнем случае должны быть указаны относительное значение чувствительности и частота, к которой относится это значение.
Должны быть указаны методы определения чувствительности и оценки ее неопределенности.
Результаты некоторых калибровок остаются верными лишь в тех окружающих условиях, при которых проводилась калибровка. Поэтому должны быть указаны условия окружающей среды при проведении калибровки. При этом следует приводить все те условия, которые могут повлиять на чувствительность испытуемого гидрофона. В протокол следует включать:
- дату калибровки;
- значение температуры воды и неопределенность ее измерения;
- данные о предусилителе гидрофона, если таковой использовался, и его идентификационный номер;
- свойства воды, длительность предварительного замачивания гидрофона и дополнительные процедуры по улучшению смачиваемости его поверхности, например, с применением специальных средств.
Примечания
1 На чувствительность однослойных электрически не экранированных мембранных гидрофонов влияет, например, электропроводность применяемой воды.
2 Чувствительность некоторых гидрофонов может изменяться за время их нахождения в воде, и поэтому важно, чтобы их калибровка проводилась после их длительного замачивания, обеспечивающего стабильность показаний;
- данные об ориентации гидрофона относительно какой-либо оси или какой-либо метки на его корпусе;
- в ситуациях, при которых устройство крепления гидрофона может влиять на результаты измерения его чувствительности, подробное описание этого устройства;
- параметры дополнительных кабелей, присоединяемых к гидрофону для калибровки;
- номинальное направление падения ультразвуковой волны относительно гидрофона.
Примечание - Это указание важно потому, например, что даже с мембранных гидрофонов сигнал может измениться при смене направления падения ультразвуковой волны на противоположное [4];
- максимальное значение акустического давления, воздействующее на гидрофон при его калибровке.
Примечание - В приложении В даны сведения о линейности гидрофонов, изготовленных из поливинилиденфторида (ПВДФ) и используемых при измерениях акустических полей с высокой амплитудой давления;
- какие-либо предположения, которые сделаны по отношению к калибруемому гидрофону (например, о положении его опорного центра).
Если условия окружающей среды, в которых применяют гидрофон, существенно отличаются от условий при его калибровке, то может оказаться необходимым, чтобы пользователь увеличил неопределенность с учетом этих отличий.
5.4 Рекомендуемые интервалы проведения калибровок
Рекомендуемый интервал проведения калибровок гидрофона зависит от его характеристик, и его назначает изготовитель.
Примечание - В большинстве случаев периодичность калибровки принимают равной 1 году (см. МЭК 62127-3).
Для эталонных гидрофонов (гидрофонов сравнения), используемых только для калибровки, рекомендуется, чтобы их калибровка проводилась ежегодно. Для гидрофонов, используемых в натурных условиях, могут потребоваться и более короткие интервалы времени.
Примечание - Для гидрофонов, используемых в натурных условиях, может оказаться полезной выборочная (сокращенная) проверка их калибровки методами сравнения с другим калиброванным (эталонным) гидрофоном или калиброванным излучателем, изложенными в приложении G. В крайних случаях, когда речь идет о стабильности рабочих гидрофонов, такая проверка может проводиться перед началом измерений и после их окончания (см. МЭК 61127-1).
6 Общие требования к системам калибровки гидрофонов
6.1 Позиционирование
6.1.1 Общие положения
Необходима точность расположения и ориентации преобразователя, гидрофона и отражателя (при реализации метода взаимности, описанного в разделе 9). Эти устройства должны быть установлены на прочных держателях, обеспечивающих требуемую юстировку. Рекомендуется, чтобы держатели гидрофона и преобразователя были снабжены устройствами их поперечного перемещения и изменения ориентации с тем, чтобы изменение положения или ориентации гидрофона (или преобразователя) на один шаг приводило к изменению сигнала с гидрофона не более чем на 0,1 дБ.
6.1.2 Точность установки гидрофона в осевом направлении
Расстояние от опорного центра гидрофона до преобразователя должно быть известно и воспроизводимо с погрешностью не более 0,2 мм.
Примечание - Для того, чтобы оценить неопределенность результатов калибровки, можно провести повторные измерения, которые предусматривают перестановку гидрофона в ту же самую точку поля, излучаемого преобразователем.
Может оказаться необходимым несколько изменить это требование для фокусирующих излучателей с учетом характера распределения генерируемого ими поля в осевом направлении.
Примечания
1 Для
фокусирующих излучателей, работающих в частотном диапазоне, соответствующем
настоящему стандарту, точность позиционирования особенно важна. Можно сделать
оценку изменения осевого расстояния по сравнению с фокусным (т.е. Δz = F - z), которое приводит к
снижению давления, равному 1 дБ. Исходя из теоретического выражения sin[ξ(1/z - 1/F)]/[ξ(1/z - 1/F)] = 0,89 (значение
0,89 соответствует - 1 дБ), где ![]() , можно определить, что такому снижению
соответствует Δz = 0,808F2/ξ.
, можно определить, что такому снижению
соответствует Δz = 0,808F2/ξ.
2 Нижеследующий пример показывает, что если плоская ультразвуковая волна с линейным диапазоном амплитуд распространяется в воде при температуре 22 °С, то ее амплитуды в двух точках на оси, отстоящих друг от друга на 2 мм, отличаются на 0,09 дБ на частоте 15 МГц и на 0,7 дБ на частоте 40 МГц, что объясняется частотной зависимостью поглощения ультразвука в воде (см. приложение Е).
6.1.3 Точность установки гидрофона в поперечном направлении
Рекомендуется проверять зависимость электрического напряжения на выходе гидрофона от изменения его положения в поперечном (относительно оси ультразвукового пучка) направлении. Гидрофон установлен правильно, если изменение напряжения при его перемещении не превышает 0,5 дБ по сравнению с максимальным значением.
Примечание - В дальнем поле идеального круглого поршневого излучателя и в фокальной плоскости идеального фокусирующего преобразователя при отсутствии нелинейных искажений снижение амплитуды сигнала, равное 0,5 дБ, наблюдается на расстоянии от оси пучка r = 0,107с ∙ z/(fat), а снижение 1 дБ - на расстоянии r = 0,151с ∙ z/(fat).
6.2 Измерения температуры и температурная стабильность
При изменении температуры окружающей среды электроакустические свойства гидрофонов изменяются. С этой точки зрения рекомендуется, если это только возможно, калибровать гидрофон при тех значениях температуры, при которых он используется в дальнейшем. Если это невозможно, то в значения чувствительности и ее частотной характеристики можно ввести поправки, основанные на результатах прежних калибровок сходных гидрофонов. Откорректированные значения чувствительности и ее частотной характеристики будут иметь более низкую неопределенность, чем неоткорректированные значения.
Примечание - Температурные отклонения нельзя игнорировать по двум причинам:
a) амплитуда ультразвуковой волны, падающей на гидрофон, зависит от температуры, так как от нее зависит и затухание ультразвука в воде (см. приложение Е);
b) время распространения ультразвукового сигнала зависит от температуры, так как от нее зависит и скорость звука в воде (см. приложение Е). Это имеет отношение к установке времени стробирования в импульсном или тонально-импульсном режимах, а также к методике спектрометрии временных задержек.
Что касается причины а), то можно привести следующий пример. Если плоская ультразвуковая волна с линейным диапазоном амплитуд распространяется при температуре 22 °С, то в точке, отстоящей на 15 см от излучателя, на частоте 15 МГц ее амплитуда будет отличаться на 0,2 дБ от той амплитуды, которая была бы при температуре, отличающейся от установленной на 1 °С; на частоте 40 МГц это отличие составит 1,5 дБ. Амплитудный коэффициент затухания в воде на малых амплитудах пропорционален квадрату частоты. Значения его температурной зависимости приведены в приложении Е.
Что касается причины b), то можно дать следующие рекомендации: при измерениях типа II, описанных в разделе 12 (сравнение чувствительностей двух и более гидрофонов), осевое расстояние необходимо корректировать для получения постоянного времени распространения.
6.3 Размеры гидрофона
Активный элемент гидрофона генерирует электрическое напряжение между своими электродами, пропорциональное акустическому давлению, усредненному по всей поверхности элемента. Если необходимо получить хорошее пространственное разрешение, то эффективный радиус гидрофона должен быть малым по сравнению с длиной волны, соответствующей самой высокой частоте акустического поля, используемого при калибровке. На реальное акустическое давление, действующее на чувствительную поверхность гидрофона, влияют и дифракционные эффекты на самом гидрофоне [5, 6, 7].
Примечание - Если гидрофон спроектирован так, что его активная поверхность известна или может быть определена, то становится возможным исключить из результатов калибровки влияние пространственного усреднения или дифракции на заданной частоте путем применения операции обратной свертки по известным размерам активного элемента.
6.4 Измерительный бак (сосуд) и свойства воды
Для обеспечения условий свободного поля на самой низкой частоте калибровки, а также требуемых расстояний между преобразователем, гидрофоном или отражателем (в методе взаимности, изложенном в разделе 9), равных не менее чем 1,5 протяженности ближнего поля каждого из преобразователей, измерительный бак должен быть большим.
Рекомендуется также, чтобы расстояния от преобразователя и гидрофона до стенок бака и водной поверхности были достаточно большими, чтобы отраженные от них сигналы не интерферировали с первичным сигналом, генерируемым преобразователем. Кроме того, если это возможно, эти поверхности рекомендуется покрывать акустически поглощающими материалами.
Важно, чтобы акустический сигнал не был искажен отраженными сигналами. Перед началом каждого измерения рекомендуется проводить следующую проверку. Во всех случаях использования импульсных или тонально-импульсных сигналов наблюдают за изменением сигнала на выходе гидрофона при изменении расстояния между преобразователем и гидрофоном в пределах нескольких миллиметров, что позволяет убедиться в отсутствии влияния многократных отражений между гидрофоном и преобразователем в сигнале, принимаемом гидрофоном. Если такое влияние отмечается, то рекомендуется изменить частоту повторения импульсов.
Свойства воды должны соответствовать требованиям изготовителя гидрофона.
Примечание - Чувствительность некоторых гидрофонов может зависеть от электропроводности водной среды. В таких случаях необходимо принять меры, чтобы убедиться, что условия проведения измерений соответствуют условиям калибровки.
6.5 Измерение выходного напряжения
Сигнал с гидрофона и преобразователя должен быть измерен с помощью осциллографа, цифрового анализатора, анализатора спектра или другого соответствующего прибора с большой полосой частот и высокой чувствительностью. Может потребоваться и дополнительное усиление сигнала гидрофона, чтобы получить необходимое отношение сигнал/шум.
Прибор, к которому подключают гидрофон или встроенный усилитель (например, осциллограф, цифровой анализатор сигнала, анализатор спектра, усилитель), должен соответствовать следующим требованиям:
- должно быть известно комплексное значение его входного импеданса в требуемом диапазоне частот, по которому можно определить чувствительность гидрофона на конце кабеля под нагрузкой (см. приложение С);
- его линейность по отношению к входному сигналу в динамическом диапазоне, равном 50 дБ, должна быть лучше ±0,3 дБ;
- в случае применения цифрового анализатора для записи волновой формы сигнала частота выборки должна быть не меньше 20f миллионов отсчетов в секунду, где f - частота в мегагерцах. Кроме того, усиление должно быть таким, чтобы обеспечить не менее 7 бит на оцифрованной волновой форме.
Примечание - Для верхней граничной частоты в 40 МГц, предусмотренной настоящим стандартом, частота выборки должна быть не менее 800 МГц.
7 Требования к электрическим параметрам
7.1 Тип сигнала
Сигналы, используемые при калибровке, могут быть синусоидальными (непрерывная волна), синусоидальными качающейся частоты [8] или импульсными с синусоидальным заполнением (стробированные тональные импульсы). Для получения детальных характеристик гидрофона во всем требуемом диапазоне частот необходимо выбрать большое количество частотных точек.
Примечание - Общая информация о различных волновых формах калибровочных сигналов в требуемых диапазонах частот приведена в приложении G.
7.2 Заземление
Чтобы устранить контуры заземления, рекомендуется, чтобы электрические выводы преобразователей не контактировали с водой. Наружные металлические части гидрофона должны быть заземлены только через экран кабеля и усилитель гидрофона. Все другие контакты с землей должны быть исключены.
7.3 Измерение электрического напряжения на выходе гидрофона
7.3.1 Общие положения
Напряжение холостого хода гидрофона следует определять на конце его кабеля.
При непрерывно-волновом сигнале измерения могут быть проведены с помощью вольтметра с высоким входным импедансом. Однако для измерения тональных импульсов наиболее удобна оцифровка волновой формы выходного напряжения гидрофона с помощью, например, цифрового осциллографа или аналого-цифрового преобразователя с компьютером. При использовании усилителя, аттенюатора или фильтра в комбинации с вольтметром или цифровым преобразователем, вместе составляющих измерительный канал, все эти элементы тоже необходимо калибровать.
Примечание - Методика калибровки с использованием непрерывно-волновых сигналов изложена в приложении Н. Общие представления об измерении сигналов с амплитудной модуляцией даны в приложении G.
7.3.2 Электрическая нагрузка в виде измерительного прибора
При измерениях гидрофон должен быть подсоединен к измерительному прибору с высоким входным импедансом (усилителю, вольтметру, осциллографу или цифровому преобразователю). Если выходной импеданс гидрофона также высок (например, для небольшого пьезоэлектрического гидрофона с низкой емкостью), то в качестве его электрической нагрузки следует рассматривать сам измерительный прибор. В таких случаях для получения напряжения холостого хода следует вводить поправку на эту электрическую нагрузку. Такая поправка может быть рассчитана по методике, изложенной в приложении С. Если при калибровке конкретного гидрофона всегда используется одна и та же электрическая нагрузка, тогда поправку удобнее ввести не в каждое значение выходного напряжения гидрофона, а в значение его чувствительности.
Примечания
1 Если гидрофон используют в последовательной комбинации таких электронных приборов, как усилитель, осциллограф и т.д., то на частотную характеристику системы в целом будут, конечно, влиять и частотные характеристики каждого компонента.
2 Следует обратить внимание на согласование выходного импеданса гидрофона (с предусилителем) и входного импеданса подсоединенного к нему измерительного прибора.
7.3.3 Электрическая нагрузка в виде удлинительного кабеля
Если к гидрофону подсоединен удлинительный кабель, то он будет являться электрической нагрузкой гидрофона и для получения значения чувствительности холостого хода необходимо ввести соответствующую поправку. Если кабель и гидрофон представить в виде электрических емкостей (это корректно для кабелей вообще и для гидрофонов на частотах ниже резонанса их активного элемента), то поправку можно определить по значениям емкостей кабеля и гидрофона. Если выходной импеданс гидрофона не является чисто емкостным (например, на частотах, близких к резонансу), то для вычисления поправки следует использовать комплексное значение импеданса гидрофона. Оба варианта введения поправки рассмотрены в приложении С. Если при калибровке какого-либо конкретного гидрофона всегда используют один и тот же удлинительный кабель, то поправку удобнее вводить в значения чувствительности гидрофона, а не в каждое значение напряжения на его выходе.
Примечание - Для уменьшения влияния электрической нагрузки некоторые гидрофоны имеют встроенный в их корпус предварительный усилитель, расположенный как можно ближе к гидрофону (см. 7.3.6). Это особенно актуально на высоких частотах для уменьшения влияния резонансов в кабеле.
7.3.4 Шум
Уровень электрических шумов может понизить точность электрических измерений. Отношение сигнал/шум должно быть таким, чтобы проводить измерения без существенных потерь точности. Предпочтительно, чтобы амплитуда измеряемого сигнала была не менее чем на 20 дБ выше уровня шумов.
Примечания
1 Уровень широкополосного интерференционного шума можно снизить с помощью полосового фильтра с полосой пропускания, достаточно широкой, чтобы пропустить полезный сигнал без искажений.
2 При наличии электрических шумов отношение сигнал/шум можно повысить усреднением повторяющихся сигналов. При наличии случайных шумов усреднение сигналов Nav повысит отношение сигнал/шум с коэффициентом, равным квадратному корню из Nav.
7.3.5 Перекрестные помехи (радиочастотная наводка) и акустическая интерференция
При наличии интерференции и перекрестных помех усреднение сигнала и узкополосная фильтрация в общем случае не приводят к увеличению отношения сигнал/шум. В этом случае рекомендуется определить причину возникновения этих эффектов и предпринять меры по их минимизации. Уровень сигнала акустической интерференции должен быть не менее чем на 30 дБ ниже уровня полезного сигнала.
При наличии перекрестных помех в тональном импульсе следует проследить, чтобы длительность импульса не превосходила время прохождения сигнала от преобразователя к гидрофону.
При использовании сигналов непрерывной волны уровень помех должен быть не менее чем на 40 дБ ниже уровня полезного сигнала.
Примечание - Уровень помех или радиочастотных наводок можно оценить, установив между преобразователем и гидрофоном достаточно тонкий лист из материала с сильным акустическим поглощением (такого, например, как пенополистирол). Он будет гасить акустический сигнал, а помехи останутся прежними.
7.3.6 Предварительный усилитель, встроенный в гидрофон
Если гидрофон имеет встроенный в его корпус предварительный усилитель (предусилитель), то чувствительность может быть выражена в виде чувствительности на конце кабеля, которая будет включать и характеристики предусилителя. В этом случае нет необходимости вводить поправку от влияния электрической нагрузки, определяемой удлинительным кабелем.
8 Подготовка гидрофонов
8.1 Общие положения
Перед началом проведения калибровки необходима тщательная подготовка гидрофона, проводимая в соответствии с 8.2 - 8.4.
8.2 Замачивание
Чтобы гидрофон хорошо смачивался водой без образования на его поверхности воздушной пленки или пузырьков, можно использовать специальное вещество для улучшения смачиваемости, им покрывают весь гидрофон. На гидрофоне не должно быть видно никаких сухих пятен после его опускания в воду и извлечения из нее.
8.3 Держатель гидрофона
Хороший держатель гидрофона не должен заметно влиять на его чувствительность. Тем не менее некоторые гидрофоны восприимчивы к способу их крепления в держателе.
В ситуациях, когда держатель гидрофона все-таки оказывает некоторое влияние, гидрофон следует калибровать с тем держателем, который будет применяться при измерениях этим гидрофоном в натурных условиях. В этом случае результаты калибровки гидрофона верны только для держателей того же типа, и вместе с протоколом калибровки следует прикладывать подробное описание держателя и способа крепления гидрофона.
8.4 Влияние кабеля
Если для проведения калибровки необходимо удлинить кабель, то для расчета влияния этой электрической нагрузки необходимо отдельно измерить электрический импеданс удлинительного кабеля. Описание способа учета этой дополнительной нагрузки дано в приложении С.
9 Калибровка методом взаимности в свободном поле
9.1 Общие положения
В этом разделе дано описание первичного метода калибровки гидрофонов в практически безграничном объеме водной среды, т.е. в условиях свободного поля с использованием принципа взаимности.
9.2 Тематика раздела
В этом разделе рассмотрены различные методы абсолютной калибровки лабораторных эталонных гидрофонов, обеспечивающие наименьшую неопределенность результатов. Эти методы перекрывают диапазон частот от 50 кГц до 15 МГц.
9.3 Общие принципы
9.3.1 Для линейного обратимого пассивного электроакустического преобразователя существует строгое соотношение между его чувствительностью как приемника в свободном поле и его излучательной способностью при протекании через него электрического тока. Для каждой конкретной компоновки элементов в системе преобразователей это соотношение выражается через коэффициент взаимности.
Все методы калибровки, основанные на принципе взаимности, требуют применения взаимного преобразователя в качестве приемника и излучателя. При известных изменениях акустического поля в момент перехода с излучения на прием, измеряя ток излучателя и электрическое напряжение на приемнике, можно определить излучательную способность и чувствительность преобразователя в качестве приемника. Очевидным преимуществом этого метода является то, что требуемые акустические параметры можно определить измерениями только электрических величин. На практике калибровку, основанную на методе взаимности, реализуют несколькими способами, рассмотренными ниже.
9.3.2 Метод взаимности с использованием трех преобразователей
Такая методика широко используется в традиционной (морской) гидроакустике (см. МЭК 60565). Однако реализация этого метода на более высоких частотах затруднена из-за необходимости обеспечения высокой точности установки и ориентации преобразователей, а также из-за существенной неравномерности характеристик направленности преобразователей, работающих на частотах около 1 МГц и выше. Именно поэтому калибровки этим методом рекомендованы в диапазоне частот от 50 кГц до 1 МГц.
9.3.3 Метод самовзаимности
Калибровка этим методом, предусматривающая использование только одного (испытуемого) преобразователя и отражателя, не требует высокой точности их установки и ориентации. Однако этот метод не применим для высокочастотных гидрофонов, малые размеры которых не позволяют получить достаточную мощность излучаемого им сигнала, чтобы обеспечить требуемое отношение сигнал/шум в режиме приема (минимальный диаметр преобразователей, калибруемых этим методом, составляет около 2 мм).
9.3.4 Метод взаимности с использованием двух преобразователей
Этим методом, в котором гидрофон устанавливают в поле с известными параметрами, генерируемом вспомогательным преобразователем, можно калибровать эталонные гидрофоны в диапазоне частот от 1 до 15 МГц. Параметры поля предварительно измеряют методом самовзаимности. Этот метод обеспечивает проведение калибровки с точностью, требуемой для эталонных гидрофонов, и менее требователен к точности установки и ориентации элементов как метод взаимности с тремя преобразователями.
9.4 Калибровка методом взаимности с двумя преобразователями
9.4.1 Отражатель
Отражатель рекомендуется выбирать в форме диска из нержавеющей
стали диаметром, обеспечивающим перехватывание всего ультразвукового пучка от
какого-либо из вспомогательных преобразователей на расстоянии от его
поверхности, превышающем не менее чем в 1,5 раза протяженность ближнего поля,
определяемую как ![]() , где at -
эффективный радиус ультразвукового преобразователя, а λ, - длина ультразвуковой волны в воде на частоте калибровки.
, где at -
эффективный радиус ультразвукового преобразователя, а λ, - длина ультразвуковой волны в воде на частоте калибровки.
Толщина отражателя должна быть такой, чтобы первый сигнал, отраженный от его задней поверхности, не интерферировал с тем сигналом, который отразился от передней поверхности отражателя, на самой низкой частоте заполнения используемого тонального сигнала. Поверхность отражателя должна быть плоской в пределах ±10 мкм с шероховатостью, не превышающей ±5 мкм.
9.4.2 Процедура калибровки
Поворачивают отражатель вокруг оси, параллельной его поверхности и перпендикулярной линии, соединяющей акустический центр преобразователя и центр отражателя, на угол около 10°.
Примечание - Дальнейшее совершенствование метода связано с коаксиальным расположением гидрофона и вспомогательного преобразователя, в середине между которыми помещают отражатель. После калибровки вспомогательного преобразователя отражатель убирают и калибруют гидрофон. Этим устраняют погрешность, связанную с поворотом отражателя, а также упрощают процедуру взаимной ориентации гидрофона и вспомогательного преобразователя, что позволяет снизить общую погрешность до 0,5 дБ.
10 Калибровка в свободном поле методом плоского сканирования
10.1 Общие положения
В этом разделе рассмотрена калибровка гидрофонов методом плоского сканирования.
10.2 Тематика раздела
В этом разделе рассмотрен метод калибровки гидрофона с помощью плоского сканирования. В нем используют преобразователь с известной выходной мощностью. Этот преобразователь или излучатель может быть эталонным прибором с известным и воспроизводимым значением мощности, характеризуемым прослеживаемостью к национальным эталонам, или он может быть откалиброван непосредственно перед использованием, например, методом уравновешивания радиационной силы в соответствии с МЭК 61161. Метод плоского сканирования перекрывает частотный диапазон от 500 кГц до 15 МГц, хотя может применяться и на более высоких частотах с увеличенной оценкой неопределенности результатов.
10.3 Основной принцип
Если ML является чувствительностью на конце кабеля под нагрузкой гидрофона, опорный центр которого находится в точке (x, y, z), то мгновенное значение акустического давления р(x, y, z, t) соотносится с измеренным значением напряжения UL(x, y, z, t) на конце кабеля как
р(x, y, z, t) = UL(x, y, z, t)/ML, (3)
где (x, y, z) - координаты некоторой точки в акустическом поле;
t - момент времени.
Здесь р(x, y, z, t) соответствует акустическому давлению в плоской волне в точке опорного центра гидрофона при условии отсутствия последнего.
Вектор мгновенной интенсивности ![]() в опорной точке
ультразвукового поля, генерируемого преобразователем, центр которого находится
в начале системы координат, выражают как
в опорной точке
ультразвукового поля, генерируемого преобразователем, центр которого находится
в начале системы координат, выражают как
![]() (4)
(4)
где ![]() -
вектор мгновенного значения колебательной скорости в опорной точке.
-
вектор мгновенного значения колебательной скорости в опорной точке.
Компоненты ![]() и
и ![]() в
направлении распространения будут рассматриваться далее как скалярные величины I и v.
в
направлении распространения будут рассматриваться далее как скалярные величины I и v.
В условиях дальнего поля (при at/l ≤ 0,5), где l - расстояние от преобразователя по оси пучка), мгновенное значение интенсивности можно выразить как [9]
I(x, y, z, t) = [р(x, y, z, t)]2/(ρc), (5)
где ρ - плотность измерительной жидкости (воды);
с - скорость звука в воде.
В приложении Е приведены данные о температурной зависимости ρ и с воды как рекомендуемой передаточной среды при измерениях мощности.
Полная ультразвуковая мощность Р(l) излучения, проходящего через плоскость, установленную на расстоянии z = l перпендикулярно оси z, выражается как
![]() (6)
(6)
где dydx - элементарная площадь в плоскости z = l;
Θ - угол между осью z и направлением распространения;
![]() - интегрирование по всей плоскости.
- интегрирование по всей плоскости.
Примечание - На расстояниях l (больших ![]() , где at - эффективный радиус
ультразвукового преобразователя) под Θ в настоящем стандарте можно принять
угол между осью z и линией, соединяющей центры гидрофона и преобразователя.
, где at - эффективный радиус
ультразвукового преобразователя) под Θ в настоящем стандарте можно принять
угол между осью z и линией, соединяющей центры гидрофона и преобразователя.
Верхняя черта в выражении (6) означает усредненное во времени значение, определяемое для какой-либо величины g как
![]() (7)
(7)
Усреднив по времени выражение (5)
![]() (8)
(8)
из выражения (3) можно получить
![]() (9)
(9)
где UL(x, y, z, t) - напряжение на конце кабеля гидрофона, установленного в опорной точке (x, y, z) в момент времени t.
Здесь предполагается вычисление усредненного во времени значения квадрата напряжения на конце кабеля гидрофона. Из выражения (5) в плоскости z = l, пренебрегая cos Θ (см. D.3.9), можно выразить чувствительность гидрофона на конце кабеля под нагрузкой ML как
 (10)
(10)
Из (10) видно, что чувствительность гидрофона на конце кабеля под нагрузкой можно определить путем сканирования гидрофоном в плоскости, перпендикулярной оси ультразвукового пучка, разделив интеграл от среднего значения квадратов сигнала на выходе гидрофона на полную мощность пучка.
Примечание - Чувствительность холостого хода на конце кабеля Мс можно определить, если известны электрические импедансы гидрофона и усилителя, как это изложено в приложении С.
10.4 Требование к процедуре
10.4.1 Сканирование гидрофоном
Существует несколько методов сканирования гидрофоном ультразвукового пучка в плоскости z = l. Наиболее исчерпывающим является метод, при котором получают прямоугольную решетку из точек отсчета при перемещении гидрофона при растровом сканировании. Если профиль ультразвукового пучка имеет приблизительно цилиндрическую симметрию, то возможна и альтернативная процедура. В этом случае можно выполнить несколько диаметральных сканирований пучка по линиям, проходящим через центр пучка и расположенным друг относительно друга под равными углами. Если проводят, например, два сканирования, то они должны выполняться под углом 90° друг относительно друга. Рекомендации по выбору метода сканирования приведены в приложении D.
10.5 Проведение калибровки
10.5.1 Измерение мощности
Используют преобразователь с активным элементом в форме круглого плоского диска, полная выходная мощность которого на определенной частоте хорошо известна. Преобразователь может быть эталонным [10], его мощность должна быть известна при определенных значениях подаваемого на него электрического напряжения.
Если преобразователь не эталонный, то его мощность определяют методом измерения радиационной силы в соответствии с МЭК 61161 и [11].
Какой бы преобразователь не использовался, излучаемую им мощность Р0 определяют на частоте f непрерывного синусоидального излучения при определенных значениях напряжения UT возбуждения или в диапазоне этих напряжений. Результаты измерений представляют в виде значений выходной мощности, деленной на квадрат напряжения (см. МЭК 61161).
10.5.2 Установка преобразователя
Преобразователь устанавливают в баке для сканирования и ориентируют так, чтобы ось излучаемого им ультразвукового пучка была параллельна оси z системы сканирования. Установку и ориентацию калибруемого гидрофона выполняют в соответствии с МЭК 62127-1. В конце этой процедуры ось z системы сканирования должна быть параллельной как оси пучка, так и направлению максимальной чувствительности гидрофона.
Примечание - В устройствах установки обычно используют вертикальную или горизонтальную ориентацию пары гидрофон - преобразователь. В том и другом случае соединяющая их линия должна быть параллельной одной из осей (обозначаемой как ось z) системы сканирования.
При возбуждении преобразователя тональными импульсами они должны содержать достаточное количество периодов, чтобы обеспечить постоянство частоты f возбуждающего напряжения UT как при калибровке гидрофона, так и при измерении мощности преобразователя. Положение гидрофона в точке z = l дальнего поля должно соответствовать максимальному значению акустического давления.
Расстояние l выбирают тщательно, с учетом пространственного усреднения, направленности и поправок на затухание (см. приложение D), а также необходимости получения максимального отношения сигнал/шум.
Примечание - Значение l обычно лежит между ![]() и
и ![]() , где at - эффективный радиус
несфокусированного ультразвукового преобразователя, а λ - длина
ультразвуковой волны. Если значение эффективного радиуса несфокусированного
ультразвукового преобразователя неизвестно, то вместо него можно
использовать его геометрический радиус.
, где at - эффективный радиус
несфокусированного ультразвукового преобразователя, а λ - длина
ультразвуковой волны. Если значение эффективного радиуса несфокусированного
ультразвукового преобразователя неизвестно, то вместо него можно
использовать его геометрический радиус.
Если стробирование возбуждения практически затруднено, применяют непрерывно-волновое возбуждение. В этом случае следует предпринять меры для исключения влияния отражений от стенок бака, гидрофона и его держателя, а также образования стоячих волн.
10.5.4 Проведение измерений
Процедура заключается в измерениях напряжения на выходе гидрофона при его перемещениях в плоскости z = l, перпендикулярной оси z, путем растрового или нескольких диаметральных сканирований. Результаты представляют в виде значений напряжения на конце кабеля гидрофона UL(x, y, l, t) в зависимости от его положения в ультразвуковом пучке. Границы области сканирования определяют по уровню шумов. Суммируют квадраты напряжений в каждой точке сканирования и вычисляют значение чувствительности гидрофона на конце кабеля под нагрузкой на частоте f (см. приложение D).
10.6 Введение поправок и источники неопределенности
Выполняют окончательную оценку общей неопределенности результата измерения чувствительности гидрофона на конце кабеля под нагрузкой. Подробное руководство по оценке источников этой неопределенности приведено в приложении D.
11 Калибровка в свободном поле методом оптической интерферометрии
11.1 Общие положения
В настоящее время калибровка гидрофонов в свободном поле оптическими методами проводится в специализированных лабораториях. В рамках настоящего стандарта метод оптической интерферометрии дан в виде краткой информации. Подробное изложение этого метода приведено в приложении F.
11.2 Общие принципы метода
Обычно оптические методы предполагают измерение акустического смещения в акустическом поле, генерируемом преобразователем. Такие смещения измеряют с помощью тонкой мембраны или пленки, установленной в акустическом поле, которая колеблется совместно с колебаниями частиц среды распространения. Для обеспечения отражения света поверхность пленки (обычно толщиной в несколько микрон) металлизирована. Смещение пленки можно измерить методом оптической интерферометрии. В дальнем поле преобразователя это смещение связано с акустическим давлением простым соотношением, что и позволяет определить давление в заданной точке поля. Установив калибруемый гидрофон в ту же самую точку и измерив напряжение на его выходе, можно определить его чувствительность. В приложении F приведены два варианта реализации этого метода, используемых в лабораториях национальных эталонов некоторых стран.
12 Калибровка методом сравнения с помощью эталонного гидрофона
12.1 Общие положения
В этом разделе рассмотрены два типа измерений:
тип I - определение характеристик направленности;
тип II - сравнение чувствительностей двух или более гидрофонов.
12.2 Тематика раздела
Оба указанных выше типа измерений относятся к «относительным», что подразумевает выполнение двух или более измерений выходного напряжения гидрофонов в одинаковых условиях, при этом изменяют какой-либо один параметр и рассматривают отношение результатов (или логарифм отношения результатов) этого изменения.
Примечание - Поскольку это относится к измерениям типа II, то подразумевается, что проводят сравнение чувствительностей двух гидрофонов. Но это может быть и три, и более гидрофонов.
12.3 Общие принципы
При измерениях типа I изменяемым параметром является угол ориентации гидрофона. При этом рассматривается отношение на выходе гидрофона, установленного под каким-либо определенным углом, к напряжению на гидрофоне, сориентированном в опорном направлении. Разумеется, на практике такие измерения проводят для ряда углов при постепенном повороте гидрофона. Измерения этого типа необходимы для получения диаграммы направленности гидрофона и для определения его эффективного радиуса в соответствии с МЭК 62127-3.
При измерениях типа II один гидрофон (калибруемый) заменяют другим (гидрофоном сравнения). Измерения этого типа необходимы для получения чувствительности калибруемого гидрофона, если известна чувствительность гидрофона сравнения, и/или частотной характеристики чувствительности испытуемого гидрофона, если такая характеристика известна для гидрофона сравнения.
Такие относительные измерения имеют следующие особенности: их выполняют в баке с водой в ультразвуковом поле, излучаемом преобразователем, требования к которому приведены ниже. Существенно, чтобы измерения проводились по возможности в одинаковых условиях, что подразумевает: одну и ту же точку в ультразвуковом поле, те же самые условия возбуждения (по амплитуде и волновой форме сигнала), те же самые условия окружающей среды (например, по температуре) и т.д. Общим условием является проведение измерений при плоской волне.
При измерениях типа II на неопределенность результатов калибровки будет влиять пространственное усреднение давления. Методы оценки неопределенности для вариантов реализации метода сравнения изложены в 12.6.
12.4 Требования к процедуре измерений
12.4.1 Преобразователь в качестве источника излучения
Для измерений, рассматриваемых в настоящем разделе, в качестве источника излучения используют ультразвуковой преобразователь круговой симметрии, предназначенный для использования в воде. При этом имеются различные варианты расположения гидрофона в зависимости от электрического возбуждения и конструкции преобразователя, а также волновой формы сигнала (неискаженной, с нелинейными искажениями), действующего на гидрофон в точке измерения. Эти варианты рассмотрены в приложении G. Можно применять варианты А, В и С для несфокусированного преобразователя или варианты D и Е для сфокусированного. В зависимости от выбранного варианта волновой формы преобразователь должен генерировать сигналы требуемой амплитуды (для обеспечения соответствующего отношения сигнал/шум в сигнале гидрофона) на всех частотах калибровки. Это требование относится и к усилителю мощности в цепи возбуждения преобразователя.
Преобразователь должен отличаться временной стабильностью и не вызывать перегрева воды в баке, превышающего допустимые температурные изменения.
Примечание - Перед началом каждого измерения рекомендуется провести следующую проверку: во всех случаях применения импульсных или тонально-импульсных сигналов (волновые формы вариантов А, В, С) следует наблюдать за выходным сигналом гидрофона при перемещении последнего на несколько миллиметров относительно преобразователя для того, чтобы убедиться в отсутствии многократных отражений между гидрофоном и преобразователем. Если интерференция от таких отражений наблюдается в сигнале, принимаемом гидрофоном, то следует изменить частоту повторения импульсов.
12.4.2 Сигнал возбуждения излучателя
Амплитуда сигнала возбуждения излучателя не должна изменяться более чем на ±1 %; стабильность частоты должна быть в пределах ±0,1 %.
12.4.3 Измерительная система
Измерительная система должна соответствовать требованиям, приведенным в разделах 6, 7 и 8.
12.5 Процедура измерений
12.5.1 Измерения типа I: определение характеристики направленности гидрофона
Гидрофон устанавливают в бак с водой в поле, генерируемое излучателем, в соответствии с выбранным вариантом установки (см. приложение G), при этом опорный центр гидрофона должен находиться на оси пучка излучателя. Гидрофон должен быть установлен в устройстве, обеспечивающем его поворот вокруг оси, перпендикулярной оси пучка, независимо от двух других осей поворота, перпендикулярных друг другу. Угол поворота должен быть измерен с разрешением, равным или лучшим чем θ6/10, где θ6 - угол, соответствующий снижению чувствительности на минус 6 дБ, который становится известным в результате измерений или величину которого можно приблизительно оценить перед измерениями по геометрическому радиусу гидрофона.
Гидрофон следует поворачивать так, чтобы его опорный центр оставался в одной и той же точке ультразвукового поля с точностью, требования к которой изложены в разделе 6.
Примечание - Правильность выбора оси вращения гидрофона мембранного типа (т.е. вращается ли он вокруг центра) можно проверить, повернув его на 180° и оценив изменение времени прихода ультразвуковой волны. Для зондового гидрофона может потребоваться специальное приспособление в виде крючка, чтобы было можно поворачивать гидрофон вокруг его опорного центра.
Измерения можно проводить двумя способами: измеряют напряжение на выходе гидрофона как функцию угла его поворота на одной частоте или частотную характеристику этого напряжения, оставляя неизменной ориентацию гидрофона, и повторяют эти измерения при других углах поворота. В последнем случае группируют полученные данные и находят зависимость напряжения на гидрофоне от угла его поворота на какой-либо одной частоте. Затем значения, измеренные при различных углах поворота, делят на максимальное из них.
Примечания
1 Чтобы определить значения требуемого разрешения по углу, можно сделать следующую оценку. Предположим, что радиус гидрофона равен 0,25 мм, а скорость звука в воде при 22 °С равна 1488 м/с. Из выражения (2) в МЭК 62127-3 находим: θ6 = 8° на частоте 15 МГц и θ6 = 3° на частоте 40 МГц.
2 Значения скорости звука в воде приведены в приложении Е.
Результаты измерений характеристик направленности используют для определения эффективного радиуса активного элемента гидрофона по выражениям
аh3 = 1,62c/(2πfsinθ3) (11)
и
аh6 = 2,22c/(2πfsinθ6), (12)
где θ3 и θ6 - значения углов, при которых сигнал снижается на 3 и 6 дБ соответственно.
Примечание - Знание эффективного радиуса гидрофона важно для оценки влияния эффектов пространственного усреднения (см. приложение J). Для одних типов гидрофонов значение эффективного радиуса может зависеть от частоты, а для других - и от выбранной оси поворота.
12.5.2 Измерения типа II: калибровка методом сравнения по эталонному гидрофону
Этот метод подразумевает серию измерений, в которых гидрофоны поочередно устанавливаются в одну и ту же точку ультразвукового поля. Как минимум должна выполняться серия из двух измерений - по одному для каждого гидрофона. Однако для проверки стабильности акустического поля рекомендуется, чтобы по крайней мере после измерения второго гидрофона первый измерялся еще раз (т.е. в целом необходимы три измерения в серии). Более предпочтительна серия из пяти или более отдельных измерений.
Перед каждым одиночным измерением гидрофон устанавливают в бак с водой в акустическое поле излучателя в то положение, которое соответствует выбранному (см. приложение G). Затем с помощью юстировки гидрофона в поперечном направлении и уточнения его ориентации добиваются максимального напряжения на его выходе.
Опорный центр измеряемого гидрофона должен находиться в той точке акустического поля, которая выбрана для данной серии измерений, с требуемой точностью (см. раздел 6). Для обеспечения возможности точного позиционирования гидрофона его устанавливают в специальное устройство перемещения. В дополнение к этому полезным может оказаться определение времени распространения ультразвукового сигнала (простого или тонального импульса) для оценки расстояния между преобразователем и гидрофоном.
Измеряют выходное напряжение гидрофона как функцию частоты и затем соотносят его с результатами измерений другого гидрофона.
Если электрическая нагрузка двух измеряемых гидрофонов неодинакова, то это должно быть четко установлено и должны быть даны пояснения для расчета отношения чувствительностей этих гидрофонов при одних и тех же условиях нагрузки.
12.6 Максимальный размер гидрофона
Для того чтобы устранить погрешности измерений, связанные с пространственным усреднением, как это указано в 12.5, эффективный радиус не должен превышать предельного значения аmax, которое зависит от конкретных условий измерений, рассмотренных в приложении J.
Если эти рекомендации выполнить невозможно, то можно использовать гидрофон большего радиуса, например, как при измерениях типа II, когда сравнивают два гидрофона с эффективными радиусами, отличающимися друг от друга не более чем на ±5 %.
Если эти требования выполняются не в полной мере, то вводят теоретические поправки к полученным результатам с приведением формулы, использованной для введения поправки, и это должно быть четко разъяснено.
Приложение А
(справочное)
Оценка неопределенности результатов калибровки гидрофонов в свободном поле
А.1 Общие положения
Для ясности интерпретации результаты калибровки должны представляться совместно с оценкой неопределенности их получения. При оценке и выражении результатов калибровки следует руководствоваться документом ИСО «Руководство по выражению неопределенности результатов измерений» [3].
Согласно Руководству составляющие неопределенности группируются в зависимости от способа их оценки:
тип А: оцениваемые статистическими методами;
тип В: оцениваемые другими способами.
А.2 Суммарная (расширенная) неопределенность
Суммарную неопределенность рекомендуется оценивать по ее составляющим, как это изложено в [3].
При комбинировании составляющих неопределенности рекомендуется обращать внимание на те, значения которых выражены в децибелах. При обработке этих значений их следует перевести из децибел в линейную форму (например, в проценты или в единицы величин).
Окончательное значение расширенной неопределенности можно выразить в единицах величины, в процентах или перевести в децибелы, если это необходимо.
Примечания
1 Бывают случаи, когда использование децибел при выражении неопределенностей приводит к их асимметричному распределению (например, +1,5 дБ эквивалентно +19 %, а минус 1,5 дБ эквивалентно минус 16 %).
2 При малых значениях каждой из составляющих неопределенности, меньших, например, 1 дБ, суммарную неопределенность можно вычислять и в децибелах.
А.3 Общие источники неопределенности
Ниже представлен список общих (для всех методов) источников неопределенности результатов калибровки гидрофонов. Этот список не следует рассматривать как окончательный, но им можно пользоваться в качестве руководства при оценке неопределенности при каждой конкретной реализации методов калибровки. В зависимости от выбранного метода и способа его реализации некоторые из указанных источников будут востребованы для оценки. Например, погрешности измерительных приборов могут быть минимизированы при использовании одного и того же измерительного канала (усилителя, фильтра, вольтметра и т.д.) для всех сигналов, когда измеряют только их отношения. Однако такой подход возможен не всегда, поэтому в список включены все возможные источники погрешностей.
Источники неопределенности при калибровке методом взаимности в свободном поле:
- неточность допущений о структуре акустического поля, например, о том, что это поле сферической волны;
- погрешности определения расстояний между преобразователями;
- погрешности определения частоты акустического сигнала;
- погрешности определения значения плотности воды.
Источники неопределенности, характерные для калибровки методами сравнения:
- погрешности в калибровке гидрофона сравнения (основной источник погрешности в методе сравнения);
- кратковременная нестабильность некоторых опорных преобразователей (например, нестабильность выходного сигнала преобразователя, используемого в качестве опорного излучателя);
- нестабильность гидрофона сравнения (например, изменение его чувствительности со времени предыдущей калибровки абсолютным методом);
- различия в условиях окружающей среды при калибровке методом сравнения с теми, в которых проводили калибровку опорного гидрофона абсолютным методом, что может вызвать изменение его чувствительности (например, температуры, условий замачивания, конструкции держателя гидрофона и т.д.);
- неточность некоторых предположений о структуре акустического поля, генерируемого опорным излучателем, например, о том, что это поле сферической волны;
- погрешности установки гидрофона в одну и ту же точку акустического поля;
- недостаточная стабильность условий электрического возбуждения опорного преобразователя, включая его недостаточную линейность, если он используется и калибруется при различных уровнях сигнала;
- различия в условиях окружающей среды при калибровке методом сравнения с теми, в которых проводили калибровку опорного преобразователя абсолютным методом, что может вызвать изменение его чувствительности (например, температуры, длительности замачивания, конструкции держателя и т.д.).
Источники неопределенности, общие для всех приведенных выше методов:
- интерференция с отраженными акустическими сигналами, приводящая к нарушению условий свободного поля;
- невыполнение условий дальнего поля;
- влияние эффектов пространственного усреднения при калибровке гидрофонов из-за их конечных размеров и отступления от условия плоской волны;
- неточная ориентация, особенно на высоких частотах, на которых характеристика направленности гидрофона может быть сильно неравномерной;
- акустическое рассеяние от элементов конструкции держателя гидрофона (или наводимые на них вибрации, передаваемые гидрофону);
- погрешности измерения напряжения на приемнике (включая погрешности измерительных приборов - вольтметра, цифрового преобразователя и т.д.);
- неточность установки коэффициента усиления каких-либо используемых усилителей, фильтров, цифровых преобразователей;
- погрешности измерения тока или напряжения возбуждения излучателя;
- погрешности, связанные с недостаточной линейностью измерительной системы (применение калиброванного аттенюатора для выравнивания измерительных сигналов может существенно уменьшить влияние этого источника);
- неточность используемых аттенюаторов электрических сигналов;
- влияние электрического шума, включая радиочастотные наводки;
- неточность условий электрической нагрузки при расчете влияния импедансов удлинительных кабелей и предварительных усилителей;
- налипание на преобразователи воздушных пузырьков - их влияние можно минимизировать соответствующим замачиванием преобразователей и улучшением смачиваемости их поверхности;
- влияние условий окружающей среды, таких как температура воды; если указывают, что результаты калибровки верны лишь в тех условиях, в которых эта калибровка проводилась, то нет необходимости введения поправок.
Приложение В
(справочное)
Поведение
полимерных чувствительных датчиков из ПВДФ в ультразвуковых полях
высокой интенсивности
B.1 Общие положения
Ультразвуковые поля высокой интенсивности обычно применяют в ультразвуковых биологических и медицинских исследованиях. В настоящее время хорошо известно, что поля с высокими амплитудами давления приводят к нелинейным эффектам в среде распространения, сопровождающимся искажениями и образованием гармонических составляющих в волновой форме сигнала [12] - [14]. Для точных измерений параметров ультразвуковых полей наиболее подходят широкополосные калиброванные полимерные гидрофоны как зондового, так и мембранного типа, частотные характеристики и характеристики направленности которых описаны в [15]. Однако информация о линейности отклика таких гидрофонов существенно ограничена. Линейность крайне важна для медицинских применений; современное медицинское диагностическое оборудование способно излучать поля с амплитудой акустического давления порядка 10 МПа [16]. Такие амплитуды лишь на порядок ниже тех, которые присутствуют в фокальной области импульсов ударной волны аппаратов экстракорпоральной литотрипсии (литотриптеров).
В дополнение к этому следует учесть, что линейность отклика гидрофона на давление важна и при реализации методов калибровки с использованием нелинейных искажений [17].
Рассмотренные ниже испытания были проведены для определения линейности ультразвуковых гидрофонов, сделанных на основе полимера ПВДФ [18].
B.2 Теоретические основы
Теория нелинейной акустики имеет множество ультразвуковых применений как в водной, так и в воздушной средах [12]. В последнее время ее стали применять в диапазоне частот, используемом для биомедицинской визуализации [13], [14].
Хорошо известно, что степень искажения ультразвуковой волны зависит от расстояния до источника [12]. Эта зависимость является критерием для определения степени искажения волновой формы, вызванного нелинейностью распространения, т.е. нелинейностью дифференциальных уравнений, описывающих распространение, и самой среды распространения (в данном случае воды). Тот же самый критерий дает возможность отделить вышеупомянутые искажения от искажений волновой формы сигнала гидрофона, вызванных нелинейностью его отклика на давление, или от возможных искажений, связанных с реакцией акустического излучателя на напряжение его возбуждения. Данный критерий был использован при описанных ниже испытаниях, чтобы убедиться, что наблюдаемые нелинейные эффекты не связаны с возможной нелинейностью функции электроакустического преобразования.
B.3 Испытания
Все описанные в настоящем пункте измерения были проведены в дистиллированной дегазированной воде при температуре (21,0 ± 0,1) °С. В экспериментальной установке были использованы различные ультразвуковые излучатели, работающие на частотах от 2,25 до 10 МГц, и гидрофоны как зондового, так и мембранного типов [15], [19]. В дополнение к этому было применено оптоакустическое устройство, способное генерировать ударные волны [20], [21]. Если ультразвуковые излучатели могли генерировать акустическое давление с амплитудами порядка 5,5 МПа (что соответствует пространственному пику пик-временной интенсивности порядка 1000 Вт см-2), то оптоакустический источник генерировал ударные волны с пиковыми значениями давления сжатия выше 10 МПа.
Оба источника и гидрофон были тщательно сориентированы друг относительно друга с помощью трехкоординатного микроманипулятора. Сигнал с гидрофона поступал на анализатор спектра и отображался на его экране для оценки содержания гармонических составляющих. Одновременно сигнал наблюдали по осциллографу, с помощью которого фотографировали волновые формы сигналов при различных осевых расстояниях от источника.
Перед каждым циклом измерений проверяли, что причиной искажений волны является нелинейность ее распространения, а нелинейная зависимость акустического окна (излучающей поверхности) от напряжения возбуждения источника искажений не вносит. Как отмечено выше, такая проверка была основана на том факте, что искажения волны зависят от расстояния до источника, и состояла в том, что после записи форм импульса при различных осевых расстояниях их анализировали. Эти измерения проводили как с зондовым гидрофоном, так и с недемпфированным гидрофоном мембранного типа [15], [19].
Для определения линейности отклика гидрофона при увеличении акустического давления были применены три различные процедуры.
В первой процедуре оценивалась линейность калиброванных гидрофонов зондового типа; при этом измерялось увеличение выходного сигнала гидрофонов диаметром 0,6 и 1 мм при повышении напряжения возбуждения излучателей. Максимальное значение акустического давления сжатия, измеренное гидрофонами в фокальной области используемых преобразователей, составляло около 5 МПа на частоте 3 МГц.
Вторая процедура предусматривала измерение полной акустической мощности, генерируемой выбранным излучателем. Для сканирования поля и последующего вычисления полной мощности излучения применяли калиброванные миниатюрные гидрофоны зондового и мембранного типов [22]. Затем результаты расчета мощности сравнивали с результатами измерений мощности того же самого поля и на том же самом расстоянии от излучателя, выполненных методом уравновешивания радиационной силы. Для уменьшения погрешности, связанной с эффектом пространственного усреднения, эти измерения проводили в частотном диапазоне от 1 до 2 МГц.
В третьей процедуре был применен оптоакустический преобразователь. В работах [23] - [25], касающихся ультразвуковых хирургических приборов, было показано, что такое устройство излучает расходящееся поле, амплитуды давления в котором обратно пропорциональны расстоянию до источника.
B.4 Результаты
Рассмотренные измерения по оценке линейности были проведены на 30 гидрофонах зондового типа диаметром 0,6 и 1 мм [15] и на 10 гидрофонах мембранного типа [15], [19].
В рассмотренной выше первой процедуре линейность калиброванных гидрофонов зондового типа диаметром 0,6 и 1 мм оценивали по увеличению выходного напряжения на них при постепенном повышении напряжения возбуждения излучателя на частоте 3 МГц. Графическая зависимость сигнала гидрофона от напряжения возбуждения излучателя свидетельствовала о линейном соотношении между этими величинами.
Во второй процедуре для сканирования поля были применены калиброванные миниатюрные гидрофоны зондового и мембранного типов [22]. Значения мощности, рассчитанные по результатам сканирования, сравнивались со значениями мощности, измеренной методом уравновешивания радиационной силы. Для одного и того же излучателя (1,5 или 2,25 МГц) расхождение между измеренным и рассчитанным значениями мощности составило приблизительно 22 %.
Третья процедура состояла в измерениях акустического сигнала, генерируемого оптоакустическим преобразователем. В частотном диапазоне от 1 до 10 МГц на волновых формах сигналов наблюдались искажения, связанные с нелинейными свойствами среды распространения. Волновая форма сигналов, излучаемых оптоакустическими преобразователями, сходна с той, которая характерна для фокальной области известных литотриптеров. Для этих преобразователей была экспериментально подтверждена обратная пропорциональность зависимости амплитуды акустического давления от расстояния до источника, при этом максимальное значение амплитуды измеренного давления составляло около 10 МПа, а отклонение полученной зависимости от закона обратной пропорциональности не превышало неопределенности результатов эксперимента (15 %) [21].
Какое-либо расхождение с законом обратной пропорциональности, превышающее суммарную неопределенность результатов измерений, подразумевает возможную нелинейность характеристики гидрофона. Однако такого расхождения не наблюдалось ни для мембранных, ни для зондовых гидрофонов [21].
B.5 Заключение
Для большого количества полимерных гидрофонов на основе ПВДФ была оценена линейность их отклика на давление. Измерения были выполнены в диапазоне давлений до 10 МПа. С помощью различных процедур было показано, что наблюдаемые нелинейные эффекты связаны только с нелинейным распространением ультразвуковой волны в среде. Было получено хорошее соответствие результатов измерения с помощью полимерных гидрофонов как зондовых, так и демпфированных мембранных.
Кроме того, не наблюдалось какого-либо отклонения, превышающего суммарную неопределенность результатов измерений, от закона обратной пропорциональности давление - расстояние, проведенных с помощью как зондовых, так и мембранных гидрофонов. Как указано выше, такое расхождение свидетельствовало бы о нелинейности отклика гидрофона на увеличение действующего на него акустического давления.
Амплитуды акустического давления в рассмотренных выше испытаниях были ограничены значением приблизительно 10 МПа. Дополнительным свидетельством, подтверждающим изложенные выше результаты, являются результаты испытаний гидрофонов на основе ПВДФ, специально разработанных для гидроакустических применений [26], [27]. Они показывали пренебрежимо малые изменения (в пределах 0,6 дБ) частотной характеристики чувствительности при изменении гидростатического давления до 69 МПа.
Основываясь на результатах испытаний и на информации, опубликованной в [26], [27], можно сделать вывод, что полимерные гидрофоны характеризуются хорошей линейностью в диапазоне интенсивностей, характерном для использования в эхоимпульсных системах ультразвуковой диагностики [16].
В дополнение к этому следует иметь в виду, что пиковые значения акустического давления в фокальной области могут достигать значений порядка 100 МПа, а измеряемая форма ударных волн остается неизменной при уменьшении напряжения возбуждения или напряжения, прикладываемого к электродам аппаратов электрогидравлического типа. Это не дает строгого подтверждения линейности чувствительности ПВДФ как материала, но и не свидетельствует, с другой стороны, что имеется какая-либо нелинейность в отклике на давление специально разработанных гидрофонов на основе ПВДФ в диапазоне давлений приблизительно до 70 МПа.
Приложение С
(справочное)
Поправки на электрическую нагрузку
С.1 Общие положения
Чувствительность гидрофона часто представляют в виде чувствительности холостого хода на конце кабеля. Это чувствительность гидрофона на конце его кабеля, не подсоединенного к какой-либо электрической нагрузке. Если к выходу гидрофона подключена какая-либо конкретная электрическая нагрузка, например осциллограф, усилитель или удлинительный кабель, то чувствительность на конце кабеля гидрофона под нагрузкой может быть связана с чувствительностью холостого хода на конце кабеля выражением, приведенным ниже.
С.2 Поправки с использованием комплексного значения импеданса
Рассмотрим общий случай, в котором гидрофон рассматривают
как двухполюсник с комплексным электрическим импедансом на его выходе ![]() , подключенный
к нагрузке с комплексным импедансом
, подключенный
к нагрузке с комплексным импедансом ![]() . Чувствительность на конце кабеля
гидрофона под нагрузкой ML при его подключении к нагрузке связана с чувствительностью
холостого хода на конце кабеля Мс выражением
. Чувствительность на конце кабеля
гидрофона под нагрузкой ML при его подключении к нагрузке связана с чувствительностью
холостого хода на конце кабеля Мс выражением
 (C.1)
(C.1)
где ![]() и
и ![]() обозначают
реальную и мнимую части комплексного значения соответствующего импеданса.
обозначают
реальную и мнимую части комплексного значения соответствующего импеданса.
Часто электрическую нагрузку можно представить в виде
параллельного соединения активного сопротивления RL и электрической емкости CL. В
этом случае ![]() и
и ![]() выражают
как
выражают
как
![]() (C.2)
(C.2)
![]() (C.3)
(C.3)
где ω - круговая частота.
С.3 Поправки с использованием емкостей
Если импедансы как гидрофона, так и нагрузки можно представить в виде емкостей, то возможно дальнейшее упрощение выражения (С.1). Это достаточно верное представление для гидрофона на частотах много ниже его резонансной частоты и для таких нагрузок, как удлинительные кабели. В этом случае, если СH - емкость гидрофона на конце интегрированного с ним кабеля с разъемом, выражение (С.1) упрощается до
![]() (С.4)
(С.4)
Приложение D
(справочное)
Абсолютная калибровка гидрофонов методом плоского сканирования
D.1 Общее представление
В этом приложении дано подробное описание методики калибровки гидрофонов с использованием плоского сканирования. Приведены рекомендации по проведению механического сканирования гидрофоном и оценке наиболее важных источников неопределенности результатов калибровки.
D.2 Методика сканирования гидрофоном
Существует несколько способов сканирования гидрофоном ультразвукового пучка в плоскости z = l. Наиболее распространенным является способ получения прямоугольной сетки точек отсчета при перемещении гидрофона методом двухмерного растрового сканирования. В этом случае
![]() (D.1)
(D.1)
где М и N - количество точек отсчета в направлениях y и x соответственно;
Δх, Δу - размеры шага перемещения гидрофона в направлениях x и y соответственно.
Если профиль пучка преобразователя имеет приблизительно круговую симметрию, то возможна и альтернативная процедура сканирования. В этом случае можно выполнить несколько диаметральных сканирований пучка. Линии сканирования должны проходить через центр ультразвукового пучка и располагаться друг относительно друг друга под равными углами. Если, например, проводят два сканирования, то их направления будут повернуты друг относительно друга на 90°. Для N диаметральных сканирований получим
 (D.2)
(D.2)
где r - расстояние от каждой точки отсчета до центра ультразвукового пучка (равное (у2 + х2)1/2, если центр пучка выбран в начале системы координат x, y);
Δr - размер шага сканирования;
R1i и R2i - расстояния от центра пучка до крайних точек отсчета при диаметральном сканировании пучка;
s - расстояние от центра пучка до ближайшей к нему точки отсчета.
Второй член в правой части выражения (D.2) характеризует вклад центральной части пучка в полную сумму результатов сканирования.
Примечание - Выражение (D.2) не предполагает совпадения точки отсчета с центром пучка или равного отстояния точек отсчета от центра пучка.
D.3 Поправки и источники неопределенности результатов измерений
D.3.1 Полная мощность
При измерениях, проводимых в соответствии с разделом 10, гидрофон устанавливают на расстоянии z = l от преобразователя. В этом случае необходимо ввести поправку на поглощение ультразвука в воде, поскольку выходная мощность Р0 преобразователя приведена к нулевой дистанции (z = 0). Для введения этой поправки используют соотношение
Р(l) = Р0exp(-2αz), (D.3)
где Р0 - полная ультразвуковая мощность преобразователя;
Р(l) - полная мощность ультразвукового пучка в плоскости нахождения гидрофона;
α - амплитудный коэффициент затухания плоской волны в среде (обычно в воде).
В приложении Е приведены значения затухания в воде в зависимости от температуры и частоты, которые можно использовать в выражении (D.3).
Имеются три источника неопределенности значения полной мощности Р(l) ультразвукового пучка в месте расположения гидрофона, и вклад каждого из них следует оценить. Первый источник - это систематическая погрешность определения полной выходной мощности Р0 как для эталонного преобразователя, так и от преобразователя, мощность которого измеряют непосредственно перед калибровкой методом уравновешивания радиационной силы (см. МЭК 61161).
Второй источник неопределенности связан с возможной разницей в значениях полной выходной мощности преобразователя во время проведения процедуры сканирования и измеренной во время его калибровки. Максимальное значение связанной с этим неопределенности можно оценить из предварительных сведений о стабильности преобразователя. Этот источник неопределенности следует оценивать отдельно для каждого используемого преобразователя.
Третий источник неопределенности полной мощности связан с необходимостью введения поправки на затухание ультразвука в воде. Неопределенность возникает как из-за погрешности в оценке коэффициента затухания α/f2, которую рекомендуется принимать равной ±1,7 % для всех температур [28], [29], так и из-за погрешности в определении расстояния /между преобразователем и гидрофоном. Это расстояние можно определить по осциллографу измеряя время задержки сигнала, принимаемого гидрофоном, по отношению к времени подачи сигнала возбуждения преобразователя.
D.3.2 Сигнал, принимаемый гидрофоном
Сигнал на выходе гидрофона UL(x, y, l, t) обычно измеряют с помощью осциллографа, цифрового преобразователя или другого соответствующего измерительного прибора, погрешность которого следует оценить. Она будет зависеть от содержания гармоник в выходном сигнале гидрофона, частотной характеристики самого гидрофона и метода измерения этого сигнала.
Было установлено, что реализация метода сканирования с использованием сигналов с искаженной волновой формой приводит к существенным погрешностям калибровки [30]. Эти погрешности возрастают, если для измерений выходного сигнала гидрофона используют пик-положительные значения акустического сигнала, и снижаются при использовании значений «от пика до пика» или пик-отрицательных значений акустического давления.
D.3.3 Суммирование
При проведении плоского сканирования существенным является правильный выбор точек отсчета. На основании анализа, проведенного в [28], принимаем, что при диаметральном сканировании с допустимостью о цилиндрической симметрии пучка необходимы, по меньшей мере, 7 точек отсчета между (и включая) крайними точками, соответствующими снижению профиля давления на 6 дБ относительно давления на оси пучка (или 5 точек отсчета между крайними точками, соответствующими снижению профиля квадратов давления на 6 дБ), для получения неопределенности чувствительности гидрофона, вызванной пространственным ограничением суммирования, менее ±1 %. При растровом сканировании, если М и N в выражении (D.1) выбраны так, что обе линии сканирования (в направлениях x и y), проходящие через центр пучка, содержат, по меньшей мере, 7 точек отсчета между (и включая) крайними точками, соответствующими снижению профиля давления на 6 дБ относительно давления на оси пучка, то неопределенность чувствительности гидрофона, вызванная пространственным ограничением суммирования, будет менее ± 1 %. Вклад этого источника неопределенности, связанного с конечным числом точек отсчета при том или другом методе сканирования, должен быть оценен для каждого конкретного числа точек отсчета.
Допустимость предположения о цилиндрической симметрии пучка при диаметральном сканировании может быть проверена при анализе результатов сканирования по каждой радиальной линии, суммируя их как
![]() (D.4)
(D.4)
где rj - расстояние от центра пучка до точки отсчета;
jmax - номер самой дальней точки отсчета радиальной части линии сканирования.
Примечание - Предполагается, что каждое диаметральное сканирование может быть разделено на два радиальных, результаты которых анализируются отдельно.
Определяют разность (в процентах) между максимальным и минимальным значениями, полученными для всех радиальных линий диаметрального сканирования из выражения (D.4), и половину этой разницы считают как вклад источника неопределенности, связанной с допустимостью предположения о цилиндрической симметрии ультразвукового пучка.
D.3.4 Характеристика направленности
Если характеристика направленности гидрофона известна, то необходимо ввести поправку на ее неравномерность. Если этого сделать нельзя, то в каждой точке сканирования следует уточнять ориентацию гидрофона, добиваясь максимального сигнала на его выходе. Достижение такой оптимальной ориентации не обязательно для каждой точки отсчета, если при перемещении гидрофона от одной точки к другой изменение угла падения ультразвука на него мало. Процедура введения поправки должна состоять в следующем. Сначала измеряют характеристику направленности гидрофона на частоте f. Затем представляют ее в виде нормированной функции D(Θ1), где Θ1 - угловая ориентация гидрофона. Для введения поправки в результаты сканирования следует разделить сигнал на выходе гидрофона UL(x, y, l, t) на коэффициент D(Θ1), где Θ1 = arctg[(x2 + у2)1/2/l].
Методы определения характеристик направленности гидрофонов рассмотрены в 12.5.
D.3.5 Конечные размеры гидрофона
Следует оценить вклад в неопределенность, связанный с конечными размерами активного элемента гидрофона. Гидрофон реагирует на акустическое давление, интегрированное по всей поверхности активного элемента, и именно поэтому может оказаться необходимым введение поправки на пространственное усреднение [2], [5], [31], [32]. Оценку значения этой поправки получают путем вычисления разницы между акустическим давлением в заданной точке поля и давлением, усредненным по поверхности активного элемента (см. [2] и МЭК 62127-1). При этих расчетах для определения внешних границ поверхности активного элемента следует использовать значение эффективной площади гидрофона. Эффективная площадь может быть вычислена по эффективному радиусу активного элемента гидрофона, определяемому в соответствии с 12.5 [6]. Влияние пространственного усреднения на результаты сканирования наиболее велико в центральной области пучка. Поэтому только для этой области необходимо определять источник соответствующей неопределенности или вводить поправки на пространственное усреднение. Измерения предпочтительно проводить на таком расстоянии l от преобразователя, при котором эффекты пространственного усреднения в центре пучка не превышают 5 %.
D.3.6 Шум
В общем случае сканирование проводят до таких расстояний от оси ультразвукового пучка, на которых измерительный сигнал все еще превышает шум. Для оценки вклада шумов и введения соответствующих поправок в сумму квадратов напряжения на гидрофоне следует вначале определить уровень шумов. Это можно сделать, повторив весь процесс сканирования при выключенном преобразователе и измерив при этом среднеквадратическое значение напряжения шумов в каждой точке. Значение среднеквадратического напряжения шумов Un(x, y, l) вычитают из значения измеренного сигнала следующим способом. Если усредненное значение квадратов напряжения на гидрофоне равно
![]() (D.5)
(D.5)
то усредненное значение квадратов напряжения на гидрофоне после введения поправки на вклад шумов составит
![]() (D.6)
(D.6)
Для гидрофона, установленного в крайнюю точку сканирования, сигнал на его выходе может состоять не только из шумов, но из полезного сигнала, меньшего, чем шумы. В этом случае следует определить величину вклада той области, которая не включена в площадь сканирования, что можно сделать из теоретической модели ультразвукового пучка. Давление в точке R дальнего поля круглого поршневого преобразователя пропорционально
2J1(katsinΘ)/(katsinΘ), (D.7)
где k - волновое число;
at - эффективный или геометрический радиус ультразвукового преобразователя;
Θ - угол между линией, соединяющей точку R с центром преобразователя, и осью пучка (см. раздел 4);
J1 - функция Бесселя первого рода первого порядка.
Такой подход предполагает сферическое сканирование, и поэтому вклад областей, не охваченных сканированием, следует определять путем суммирования квадратов напряжений при их теоретическом распределении в сферическом сегменте, ограниченном областью плоского сканирования, и сравнения этих результатов с результатами интегрирования по всей полусфере. Вклад периферийных областей, не охваченных сканированием, при плоском сканировании следует оценивать точно так же, как и при сферическом сканировании; его следует учитывать как поправку в результат сканирования и рассматривать как источник неопределенности, обусловленной ограничением области сканирования. Вклад периферийных областей обычно мал по сравнению с другими составляющими.
Может оказаться более практичным проведение сканирования только в области, ограниченной линией, на которой давление снижается до определенного значения, например до 10 % [26] или до 5 % [33] по сравнению с максимальным в центре пучка. В этом случае вклад областей, не охваченных сканированием, будет существенным, и описанная выше процедура определения поправки обязательна.
Примечания
1 Если эффективный радиус ультразвукового преобразователя не известен, то вместо него можно пользоваться значением геометрического радиуса.
2 Значимость вклада шумов в результаты сканирования зависит от метода измерения сигнала гидрофона.
D.3.7 Нелинейность распространения
При калибровке гидрофонов методом плоского сканирования определяют чувствительность гидрофона на конкретной частоте f. При этом важно, чтобы ультразвуковые волны не были искажены присутствием высокочастотных составляющих из-за нелинейности распространения. Для оценки значимости влияния этого эффекта на результаты калибровки гидрофонов методом плоского сканирования предложены две процедуры, выбор между которыми зависит от конкретной методики измерений и от типа калибруемого гидрофона. Обе процедуры по существу основаны на том, что неопределенность из-за влияния нелинейности распространения зависит от потерь в амплитуде основной частотной составляющей в волновой форме акустического давления. В первой процедуре предполагается, что амплитуда второй гармоники составляет определенный процент δ от амплитуды на основной частоте. В этом случае погрешность (в процентах) определения чувствительности гидрофона при δ < 30 % составит (см. D.4.5)
![]() (D.8)
(D.8)
Несмотря на простоту этой процедуры, может оказаться невозможным достоверное определение δ из-за изменения чувствительности гидрофона между частотами основной и второй гармоник или на высоких частотах из-за того, что не принимается в расчет акустическое затухание в воде.
При второй процедуре предполагают, что для поршневого ультразвукового преобразователя нелинейность распространения можно предсказать. Как показано в D.4.5, в дальнем поле преобразователя, излучающего непрерывную волну полной мощностью Р0, погрешность определения чувствительности гидрофона приблизительно составляет
для ![]() (D.10)
(D.10)
где f - частота, Гц;
at - эффективный радиус ультразвукового преобразователя, м.
Это соотношение верно для значений погрешности менее 5 % и для условий, когда затуханием в воде можно пренебречь (см. приложение Е).
Эта оценка основана на том предположении, что не определяют сигнал на частоте второй гармоники и что влияние затухания при нелинейном распространении мало. При использовании гидрофона с плоской частотной характеристикой оценка погрешности будет завышена.
Оценки неопределенности проводят с использованием приведенных выше соотношений, при этом следует считать, что они определяют верхний предел погрешностей, связанных с искажениями волновой формы сигнала гидрофона. Погрешность должна быть меньше 5 %.
D.3.8 Плоское сканирование
В строгом смысле выражение чувствительности гидрофона на конце кабеля под нагрузкой (10) из (6) должно предполагать суммирование по сферической поверхности с центром на ультразвуковом преобразователе. Погрешность из-за замены сферического сканирования плоским пропорциональна [(1/cosΘ - 1], где Θ - угол между осью пучка и линией, соединяющей центр ультразвукового преобразователя с опорным центром активного элемента гидрофона. Предполагая, что угол Θ в крайних точках плоского сканирования меньше 10°, можно считать, что погрешностью из-за перехода к плоскому сканированию можно пренебречь [28], однако при больших углах оценка вклада этого источника в неопределенность обязательна.
D.3.9 Пропорциональность интенсивности квадрату давления
Выражение (5) предполагает, что мгновенное значение интенсивности пропорционально квадрату акустического давления. Оценить различие между истинным значением мгновенной интенсивности I и значением Ip, полученным из квадрата акустического давления, на оси круглого поршневого ультразвукового преобразователя можно по следующему уравнению [9]
 (D.11)
(D.11)
Для расстояний, рекомендуемых в 10.5.3, и для преобразователей обычного диаметра (от 6 до 25 мм) это отношение отличается от единицы меньше чем на 1 %. Если расстояния меньше рекомендованных в 10.5.3, то выражение (D.11) следует использовать для оценки вклада этого источника в неопределенность результатов калибровки.
D.4 Обоснование особенностей методики калибровки гидрофонов плоским сканированием
D.4.1 Общие положения
В этом разделе даны обоснования некоторых условий и операций обработки результатов, используемых при калибровке методом плоского сканирования.
D.4.2 Соотношение между эффективными радиусами гидрофона и преобразователя
Рассмотрим поршневой преобразователь с эффективным радиусом at и гидрофон с эффективным радиусом ah, расположенный на расстоянии l от преобразователя.
Волна от краев преобразователя (краевая волна) будет падать на гидрофон под углом, определяемым выражением
 (D.12)
(D.12)
Предполагают, что характеристика направленности гидрофона выражается как
2J1(kahsinθ)/kahsinθ, (D.13)
где k - волновое число, равное 2π/λ, а θ - угол падения, при котором волны от краев преобразователя будут падать на гидрофон под углом, соответствующим снижению чувствительности в характеристике направленности, меньшему, чем 1 дБ. Это означает, что (kahsinθ) ≤ 1, т.е. 2J1(kahsinθ)/kahsinθ ≈ 0,88. Следовательно, это эквивалентно
(kahsinθ) ≤ 1 (D.14)
или
![]() (D.15)
(D.15)
D.4.3 Можно показать [9], что истинная интенсивность на расстоянии l по оси поршневого преобразователя отличается от интенсивности, определенной по квадрату давления, приблизительно на 6 % для at/l = 0,5. При приближении к преобразователю интенсивность «по квадрату давления» возрастает быстрее, чем истинная интенсивность. Из этого следует, что выражение (5) корректно при at/l ≤ 0,5.
D.4.4 Преобразование выражения (D.2)
Рассмотрим результаты отсчета UL(l, r) в точках, расположенных между R1i и R2i, т.е. между крайними точками i-го диаметрального сканирования. Примем за s расстояние от центра ультразвукового пучка до ближайшей к нему точки отсчета. Представляя каждую точку, расположенную на расстоянии r от центра пучка, в виде кольца радиусом r, суммируем результаты диаметрального сканирования как
![]() (D.16)
(D.16)
Примечание - Представленное в этом разделе суммирование не совсем соответствует обычным правилам математики. Пределы показывают крайние точки суммирования. Между этими точками параметр r в (D.16) представлен выбранными дискретными точками.
Вклад UL(l, s) центральной точки s нельзя представить аналогично вкладу кольцевых элементов как для других точек r. В этом случае следует рассматривать отдельный вклад двух половинок круга, расположенных около центральной точки, как
 (D.17)
(D.17)
Так как в выражении (D.16) уже предусмотрен вклад UL(l, s) точки s, то в это выражение необходимо ввести поправку, определяемую разницей истинного значения вклада центральной точки и тем членом, который имеется в выражении (D.16), т.е.
 (D.18)
(D.18)
приводимую к виду
 (D.19)
(D.19)
Эта поправка и представлена последним членом в выражении (D.2).
Если точка, соответствующая UL(l, s), совпадает с центром пучка, то s = 0 и член в фигурных скобках выражения (D.2) сокращается до
![]() (D.20)
(D.20)
Примечание - Так как под знаком суммы отсутствует член, соответствующий центральной точке [r = 0 для UL(l, 0)], то вкладу центральной точки соответствует правый член выражения (D.20).
D.4.5 Влияние нелинейного распространения
Ниже приведено преобразование выражения (D.9), относящееся к влиянию нелинейности распространения.
Полезной аппроксимацией поля давлений с конечной амплитудой,
генерируемого поршневым излучателем на расстояниях порядка или больше чем
нормированное расстояние ![]() является представление профиля пучка
функцией Гаусса.
является представление профиля пучка
функцией Гаусса.
При небольших искажениях отношение амплитуды составляющей на основной частоте на оси распространения волны к амплитуде при отсутствии искажений равно [34]
![]() (D.21)
(D.21)
для
 (D.22)
(D.22)
где р1 - амплитуда акустического давления на поверхности ультразвукового преобразователя, связанная с полной акустической мощностью Р0, излучаемой преобразователем как
![]() (D.23)
(D.23)
Амплитуду давления в точках, не лежащих на оси пучка, и при малых искажениях (σ < 0,5) получают умножением σ на функцию направленности преобразователя [35]. Поэтому в предположении Гауссова профиля пучка квадратный корень из интеграла квадратов акустического давления отличается от его значения при отсутствии искажений как
 (D.24)
(D.24)
Отсюда погрешность (в процентах) калибровки гидрофонов выражается как
 (D.25)
(D.25)
Если R находится в диапазоне от 0,5 до 3, то эта формула может быть аппроксимирована формулой (D.9).
Приложение Е
(справочное)
Таблица Е.1 - Скорость звука [36], [37] и удельный акустический импеданс воды в зависимости от температуры
|
Температура, °С |
Скорость звука, с, м ∙ с-1 |
Акустический импеданс, ρс, ×106 кг ∙ м-2с-1 |
|
15 |
1465,9 |
1,4647 |
|
16 |
1469,4 |
1,4679 |
|
17 |
1472,8 |
1,4710 |
|
18 |
1476,1 |
1,4740 |
|
19 |
1479,2 |
1,4769 |
|
20 |
1482,4 |
1,4796 |
|
21 |
1485,4 |
1,4823 |
|
22 |
1488,3 |
1,4850 |
|
23 |
1491,2 |
1,4875 |
|
24 |
1494,0 |
1,4900 |
|
25 |
1496,7 |
1,4923 |
|
26 |
1499,4 |
1,4946 |
|
27 |
1501,9 |
1,4967 |
|
28 |
1504,4 |
1,4988 |
|
29 |
1506,8 |
1,5008 |
|
30 |
1509,2 |
1,5026 |
|
31 |
1511,4 |
1,5044 |
|
32 |
1513,6 |
1,5062 |
|
33 |
1515,8 |
1,5078 |
|
34 |
1517,8 |
1,5094 |
|
35 |
1519,9 |
1,5108 |
|
36 |
1521,8 |
1,5122 |
|
37 |
1523,7 |
1,5136 |
|
38 |
1525,5 |
1,5148 |
|
39 |
1527,2 |
1,5160 |
|
40 |
1528,9 |
1,5171 |
Коэффициент затухания при распространении в воде
Значение α в мегагерцовом диапазоне частот пропорционально f2. Его температурная зависимость в диапазоне от 0 °С до 60 °С выражается полиномом [29]
α/f2 = (5,68524 ∙ 101 - 3,02545 ∙ 10° Т + 1,17416 ∙ 10-1Т2 - 2,95430 ∙ 10-3Т3 + 3,96985 ∙ 10-5Т4 - 2,11091 ∙ 10-7Т5) ∙ 10-15 Гц-2 · м-1.
Примечание - Если амплитудный коэффициент затухания необходимо перевести из м-1 в дБ ∙ м-1, то численное значение необходимо умножить на 20log10(е) = 8,69.
Приложение F
(справочное)
Абсолютная
калибровка гидрофонов методом оптической интерферометрии
на частотах до 40 МГц
F.1 Общее представление
В приложении рассмотрены современные абсолютные методы калибровки ультразвуковых гидрофонов на частотах выше 15 МГц. Некоторые из методов, которые применяли в прошлом и используют до сих пор, рассмотрены в разделе F.2. Они основаны на использовании эффектов нелинейного распространения плоских волн, а также на измерении смещения с помощью оптического интерферометра. Перспективность второго метода, в частности, заключается в том, что результаты калибровки могут иметь прямую прослеживаемость к первичному эталону единицы длины.
В приложении рассмотрены также достижения по внедрению абсолютных методов калибровки, основанных на оптической интерференции, в двух лабораториях национальных эталонов. Принципиальные различия между двумя реализациями этого метода, обозначенными в F.2.3.1 и F.2.3.2 как реализация I и реализация II, заключаются в расположении акустического пучка относительно лазерного луча. В реализации II, в противоположность реализации I, оптический луч пересекает акустический пучок.
Примечание - Под «абсолютной» калибровкой гидрофона здесь подразумевают калибровку «без сравнения с другим гидрофоном». Иногда ее называют «первичной» калибровкой. С другой стороны, часто на практике гидрофоны калибруют «вторичным» методом или методом «замещения», который предполагает сравнение чувствительностей калибруемого гидрофона и гидрофона сравнения. Очевидно, что в этом заключается принципиальное различие: проводить абсолютную калибровку гидрофона или сравнивать чувствительности двух гидрофонов. В приложении речь идет о первом из этих методов. Второй метод достаточно подробно рассмотрен в разделе 12 настоящего стандарта. Следует отметить, что калибровка замещением обычно охватывает оба метода и заинтересованный специалист может обратиться как к разделу 12, так и к этому приложению, тем более что здесь рассмотрены источники неопределенности результатов абсолютной калибровки, которые должны быть включены в неопределенность результатов конечной калибровки методом замещения.
F.2 Современное состояние
F.2.1 Метод, основанный на нелинейном распространении
В прошлом предпринимались попытки калибровать гидрофоны на частотах до 100 МГц с использованием «эмпирической модели нелинейного распространения» [34], [38] - [42]. Этот метод рассмотрен в [34]. Он основан на эффекте нелинейного распространения плоских волн и использует то обстоятельство, что для поршневого преобразователя относительно большого диаметра соответствующей временной селекцией акустического сигнала можно устранить влияние тех составляющих плоской волны, которые излучаются краями преобразователя. При высоких амплитудах давления плоские волны подвергаются искажению, создавая в акустическом поле множество гармоник. Чтобы спрогнозировать искажения этих звуковых волн, используют теоретическую модель распространения плоской волны, затем путем сравнения расчетной зависимости с результатами измерений, проведенными в непосредственной близости от преобразователя (т.е. неискаженными), и в точке, удаленной от него на известное расстояние по оси пучка (т.е. искаженными из-за нелинейности распространения и содержащими множество гармоник), можно провести калибровку гидрофона на каждой частотной гармонике.
Результаты, полученные этим методом, были перспективны и хорошо соответствовали теоретическим расчетам чувствительности двух мембранных гидрофонов. Однако у данного метода были и некоторые недостатки. Во-первых, результаты сильно зависят от выбранной модели распространения. Во-вторых, реализация метода связана с характеристиками преобразователя, используемого для создания акустического поля. Недостатки преобразователя могут существенно исказить излучаемую им плоскую волну и привести к существенной неопределенности результатов калибровки.
Использование фокусирующего преобразователя малого диаметра для образования гармоник в его фокальной области устраняет некоторые из этих недостатков. Измеряемые поля на известном фокусном расстоянии, характеризуемые главным лепестком направленности, можно воспроизвести достаточно точно. В фокусе можно получить высокие значения давления с наличием множества гармоник на расстояниях, более коротких, чем при использовании плоских волн. Подходящие для этого фокусирующие преобразователи с одинаковыми характеристиками в настоящее время доступны для приобретения.
F.2.2 Оптическая интерферометрия
При калибровке методом оптической интерферометрии излучаемая преобразователем акустическая волна принимается тонкой пластиковой мембраной (пленкой), металлизированной с одной стороны для обеспечения оптического отражения. Пленка достаточно тонкая, чтобы быть акустически прозрачной и отслеживать акустические колебания. Смещения пленки измеряют методом оптической интерферометрии и по этому смещению вычисляют акустическое давление. Калибруемый гидрофон устанавливают в акустическое поле так, чтобы его центр находился точно в той точке, на которую был направлен луч лазера. Затем измеряют выходное напряжение на гидрофоне и по известному акустическому давлению определяют его чувствительность.
Ясно, что для реализации этого метода необходимо такое акустическое давление, которое бы обеспечило требуемое отношение сигнал/шум в выходном сигнале гидрофона на нужных частотах, т.е. до 40 МГц. Однако оптический интерферометр в действительности измеряет не давление, а акустическое смещение, и это предъявляет более жесткие требования к обеспечению отношения сигнал/шум. Для плоской волны амплитуда акустического давления р0 определяется выражением
р0 = ρсωζ, (F.1)
где ρ - плотность измерительной жидкости (воды);
с - скорость звука в среде;
ω - круговая частота;
ζ - амплитуда акустического смещения без учета разности фаз между давлением и смещением.
Если не учитывать разность фаз между давлением и смещением, то из выражения (F.1) следует, что для создания смещений, которые при заданном акустическом давлении обратно пропорциональны частоте сигнала и которые можно было бы измерить на частотах 40 МГц и более, необходимо генерировать поле с высокими значениями акустического давления. Следует отметить, что в каждой из рассмотренных ниже реализаций метода для увеличения акустического давления использованы фокусирующие преобразователи.
F.2.3 Высокочастотные применения метода оптической интерферометрии
F.2.3.1 Реализация I
F.2.3.1.1 Измерительная система
Калибровка оптическим методом заключается в измерении смещения мембраны, установленной на поверхности жидкости, в которую помещен преобразователь (рисунок F.1). Звуковая волна, генерируемая преобразователем, падает на мембрану перпендикулярно и смещает ее; размер смещения измеряют с помощью интерферометра Майкельсона [43] - [46]. В качестве источника света используют лазер; для разделения и объединения оптических полей применяют поляризационный делитель луча. В измерительном плече свет фокусируют на пленку, покрытую алюминиевым слоем для улучшения оптической отражательной способности.
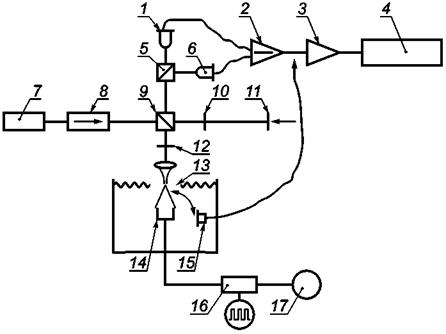
1 - фотодиод; 2 - усилитель тока; 3 - усилитель сигнала гидрофона; 4 - цифровой осциллограф; 5 - делитель луча; 6 - фотодиод; 7 - лазер; 8 - оптический изолятор; 9 - поляризационный делитель луча; 10 - четвертьволновая пластина; 11 - пьезоуправляемое зеркало; 12 - четвертьволновая пластина; 13 - пленка; 14 - акустический преобразователь; 15 - гидрофон; 16 - стробирующее устройство; 17 - синтезатор
Рисунок F.1 - Экспериментальная установка, применяемая при оптическом методе калибровки
Оптический сигнал регистрируют с помощью сбалансированной схемы фотодетектирования с шириной полосы BW ≈ 100 МГц. Схема включает два фотодиода и дифференциальный усилитель напряжения Av, управляемый током, для подавления шума и увеличения фототока. К выходу дифференциального усилителя подключен второй усилитель V с высоким входным импедансом, который может быть использован и как усилитель сигнала гидрофона (см. ниже). Интерферометр стабилизирован по оптическому пути [44] с помощью следящей системы, имеющей равный 1 коэффициент усиления на частоте около 100 Гц. В этом случае значение смещения, измеренное по току фотоэлементов, равно
![]() (F.2)
(F.2)
где λ1 - длина оптической волны (длина волны света в вакууме);
TF - коэффициент акустической передачи смещения через пленку;
US - напряжение сигнала;
![]() -
размах напряжения (от пика до пика), соответствующий полной интерференционной
полосе и измеренный на выходе усилителя V, имеющего
частотно-зависимый коэффициент усиления V(f).
-
размах напряжения (от пика до пика), соответствующий полной интерференционной
полосе и измеренный на выходе усилителя V, имеющего
частотно-зависимый коэффициент усиления V(f).
Выходное напряжение US измеряют с помощью цифрового осциллографа с шириной полосы BW > 100 МГц. Для повышения отношения сигнал/шум применяют широкополосный фокусирующий пьезоэлектрический преобразователь. Его возбуждают тональными импульсами заданной частоты, а измерения проводят непосредственно после подачи ультразвукового импульса при выходе его амплитуды на постоянное значение. Это устраняет влияние отражений от стенок измерительного сосуда.
Юстировку преобразователя проводят с помощью трехкоординатной системы позиционирования с поворотом вокруг двух осей. Пятно лазерного луча наводят на фокус преобразователя путем перемещений в направлениях, перпендикулярных оси ультразвукового пучка, которую определяют путем нахождения точек с максимальным значением давления на различных расстояниях от преобразователя. Критерием правильности юстировки является максимальный сигнал на выходе интерферометра, а также время задержки выходного сигнала относительно сигнала возбуждения. Угол между пленкой и направлением распространения звука юстируют с помощью лазерного луча.
После сохранения результатов измерения смещения пленки ее убирают и на место нахождения на ней пятна лазерного луча устанавливают гидрофон. В бак добавляют необходимое количество воды, чтобы калибруемый гидрофон оказался погруженным в воду. Эту процедуру можно упростить, если, не убирая пленку, повернуть преобразователь в сторону гидрофона, как это показано на рисунке F.1. К выходу гидрофона подключают усилитель V и измеряют напряжение при том же самом возбуждении преобразователя.
Чувствительность ML гидрофона на конце кабеля под нагрузкой определяют по формуле
![]() (F.3)
(F.3)
где с - скорость звука в воде;
ρ - плотность измерительной жидкости (воды);
UH - напряжение на выходе гидрофона;
ω (=2πf) - круговая частота сигнала с преобразователя.
При этом гидрофон нагружен на входной импеданс усилителя V.
F.2.3.1.2 Введение поправок
На значение чувствительности ML гидрофона на конце кабеля под нагрузкой влияют три эффекта систематического характера, что требует введения поправок, рассмотренных ниже.
F.2.3.1.3 Диаметр пятна
Как гидрофон, так и лазерный луч, фокусируемый на пленке, не могут быть представлены в виде точечного приемника, и поэтому необходимо принимать в расчет эффект пространственного усреднения. При количественном описании этого эффекта преобразователь рассматривают как плоский поршень [45]. Пространственное распределение смещения получают при решении интеграла Рэлея [46], что дает возможность получить по измеренным усредненным значениям пиковые значения давления [45].
F.2.3.1.4 Многократные отражения в пленке
В фокусе ультразвукового пучка поверхность жидкости закрыта пленкой для улучшения оптической отражательной способности. Падающий ультразвук частично отражается от металлизированного слоя и от внутренней (противоположной) поверхности пленки, а интерференция этих отражений оказывает влияние на смещение пленки. В связи с тем, что фазовый фронт волны в фокусе ультразвукового пучка является приблизительно плоским, то для количественного описания систематической погрешности, связанной с этим эффектом, можно принять простую модель резонанса плоских волн [45]. Это позволяет получить коэффициент акустического прохождения TF, который входит в выражения (F.2) и (F.3).
F.2.3.1.5 Частотная характеристика фотодетектора
В противоположность частотной зависимости коэффициента усиления V(f) усилителя, задействованного на двух этапах измерений и не влияющего поэтому на конечный результат измерения, частотная характеристика фотодетектора сказывается на результатах измерения чувствительности ML гидрофона. Поэтому были проведены измерения функции преобразования фотодетектора с помощью оптически смешивающего источника, что позволило ввести соответствующие поправки в результаты измерения интерферометром.
F.2.3.1.6 Результаты
На рисунке F.2 в качестве примера приведены результаты измерения чувствительности Мс холостого хода на конце кабеля компланарного мембранного гидрофона толщиной 25 мкм. Неопределенность результатов этих измерений зависела от частоты и была оценена как 9,5 % в диапазоне от 1 до 5 МГц и 8 % в диапазоне от 5 до 20 МГц. На частоте 30 МГц эта неопределенность увеличивается до 10 %, а на 40 МГц - до 12 %. Значения получены при коэффициенте охвата k = 2, что соответствует доверительной вероятности 95 %.
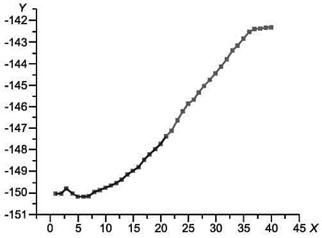
по оси X - частота f, МГц; по оси Y - чувствительность Мс, дБ отн. 1 В/Па
Рисунок F.2 - Чувствительность Мс холостого хода на конце кабеля однослойного мембранного гидрофона
F.2.3.2 Реализация II
F.2.3.2.1 Измерительная система
Метод оптической интерферометрии, разработанный для использования в первичном эталоне для калибровки ультразвуковых гидрофонов в диапазоне частот от 500 кГц до 20 МГц, подробно рассмотрен в [47]. Достоверность калибровки методом оптической интерферометрии на частотах выше 500 кГц была подтверждена международными сличениями национальных метрологических институтов [48]. При исследовании источников неопределенности было установлено, что суммарная неопределенность результатов калибровки на частотах до 20 МГц не превышает 3 % - 4 % при доверительной вероятности 95 %.
В качестве мембраны применяли пленку из полиэтилена-терефталата толщиной 3,5 мкм и 5 мкм, покрытую тонким (25 нм) слоем золота. В эталонной установке оптический луч пересекает акустический пучок и взаимодействует с ним. Источником взаимодействия является изменение показателя преломления среды, вызванное локальными изменениями ее плотности при разных фазах акустической волны - фазе сжатия и фазе разрежения. Эффект акустооптического взаимодействия рассмотрен в F.2.3.2.4.4.
F.2.3.2.2 Акустическое поле
Калибровку проводят с помощью фокусирующих преобразователей с номинальной частотой 5 МГц. Для исследования источников систематических погрешностей, связанных с акустооптическим взаимодействием и пространственным усреднением, использованы два типа преобразователей с различным фокусным расстоянием: 50 и 150 мм. Их возбуждение осуществлялось тональными импульсами достаточно большой амплитуды, чтобы генерировать волну с сильными нелинейными искажениями в заданной точке (в фокусе). Таким образом, как показано на рисунке F.3 для компланарного гидрофона толщиной 9 мкм диаметром 0,5 мм, на волновой форме принимаемого им сигнала можно найти гармоники до 100 МГц. Эта форма достаточно близка к пилообразной волновой форме, амплитуда гармонических составляющих в которой зависит от номера n гармоники как 1/n. Так как для генерирования акустических давлений большой амплитуды необходимы фокусирующие преобразователи, то их использование подразумевает введение поправок, связанных, в частности, с пространственным усреднением, тем более что при увеличении номера гармоники ультразвуковой пучок становится уже (см. F.2.3.2.4.3).
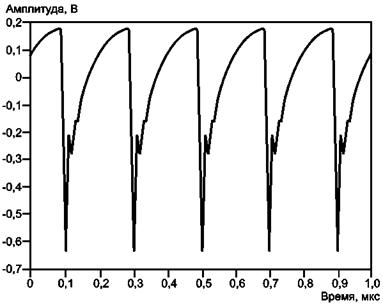
Рисунок F.3 - Волновая форма сигнала на выходе 9 мкм однослойного мембранного гидрофона, установленного в фокусе преобразователя с номинальной частотой 5 МГц и фокусным расстоянием 51 мм
F.2.3.2.3 Калибровка
На рисунке F.4 показана временная зависимость смещений пленки, расположенной в фокусе (на фокусном расстоянии 51 мм) фокусирующего преобразователя на частоте 5 МГц. На рисунке видно, что какие-либо явные искажения волновой формы отсутствуют. Это подтверждается и результатами преобразования Фурье волновой формы сигнала, показанными на рисунке F.5 (нижняя из двух кривых представляет спектр смещений). Дифференцирование этого спектра дает спектр давлений, также показанный на рисунке F.5 (верхняя кривая), где можно получить компоненты до 60 МГц. Методом сравнения спектра выходного сигнала гидрофона, установленного в ту же самую точку ультразвукового поля, с дифференцированным спектром смещений пленки калибруют гидрофон в интересующем диапазоне частот. На рисунке F.6 показаны рассчитанные таким образом результаты калибровки биламинарного мембранного гидрофона на пленке толщиной 9 мкм с диаметром активного элемента 0,2 мм. Установка, реализующая этот метод, имеет теоретический резонанс на частоте около 55 МГц, который хорошо виден на результатах калибровки. Представленные на рисунке F.6 неопределенности носят случайный характер и увеличиваются на частотах выше 40 МГц из-за уменьшения отношения сигнал/шум при измерении смещения пленки на этих частотах.
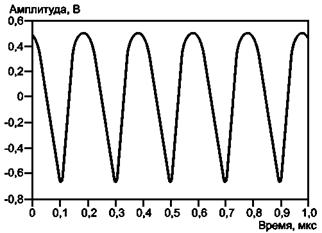
Рисунок F.4 - Измеренная интерферометром волновая форма смещения пленки, установленной в фокусе преобразователя номинальной частотой 5 МГц и фокусным расстоянием 51 мм
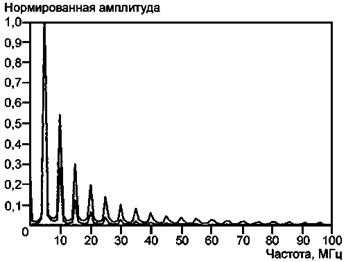
Рисунок F.5 - Частотные спектры волновых форм смещения (нижняя кривая) и его производной (верхняя кривая)
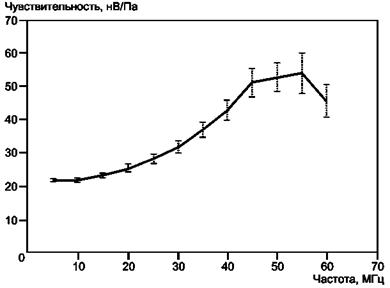
Рисунок F.6 - Чувствительность двухслойного мембранного гидрофона толщиной 9 мкм с активным элементом диаметром 0,2 мм, измеренная через 5 МГц в диапазоне от 5 до 60 МГц
F.2.3.2.4 Поправки в результаты калибровки и источники их неопределенности
Ниже кратко рассмотрены наиболее значимые источники неопределенности результатов калибровки.
F.2.3.2.4.1 Частотная характеристика интерферометра
Частотная характеристика интерферометра связана с характеристиками фотодиодов и усилителя. В прошлом она была измерена в частотном диапазоне от 1 кГц до 20 МГц с помощью калибратора, специально разработанного для этих целей [49]. Расширение полосы рабочих частот интерферометра до 60 МГц потребовало модификации частотного калибратора. С помощью модифицированного калибратора частотная характеристика интерферометра определена до 100 МГц. Неопределенность результатов его калибровки варьируется от 3,5 % на 20 МГц до 4,3 % на 40 МГц.
F.2.3.2.4.2 Коэффициент пропускания пленки
В результаты калибровки гидрофона следует ввести поправки, связанные со свойствами пленки. При определении этих поправок возможны два подхода: теоретический и экспериментальный. На основе упрощенной теории прохождения акустических плоских волн через слои разнородных материалов был разработан алгоритм расчета частотной зависимости коэффициента прохождения через пленки. Он предполагает, что затухание акустического пучка в слое золота толщиной 25 нм пренебрежимо мало.
Был разработан экспериментальный метод определения коэффициента прохождения в частотном диапазоне от 2 до 60 МГц, основанный на методе замещения, с использованием акустического поля с нелинейными искажениями, генерируемого преобразователем с основной частотой 2 МГц. Пленку, пропускание которой следовало измерить, помещали между преобразователем и гидрофоном (очень близко к гидрофону). Анализ как теоретических, так и экспериментальных результатов позволил определить частотную зависимость поправки, неопределенность которой варьируется от 1 % на 5 МГц до 2 % на 40 МГц.
F.2.3.2.4.3 Поправка на пространственное усреднение
Малая ширина пучка гармонических составляющих, генерируемых фокусирующим ультразвуковым преобразователем с основной частотой 5 МГц, делает необходимым введение поправок на пространственное усреднение давления, распределенного по поверхности активного элемента гидрофона. С помощью биламинарного (двухслойного) мембранного гидрофона толщиной 9 мкм с активным элементом диаметром 0,2 мм были проведены экспериментальные исследования пространственного усреднения в фокусе преобразователя. Преобразование Фурье волновой формы сигнала позволило определить значения ширины пучка для гармонических составляющих. При этом предполагалось, что для лазерного пучка с пятном диаметром 0,1 мм поправку на пространственное усреднение вводить не нужно. Неопределенность поправок на пространственное усреднение оценена как 1 % на 5 МГц и 6 % на 40 МГц.
F.2.3.2.4.4 Акустооптическое взаимодействие
В используемой экспериментальной установке луч света пересекает ультразвуковой пучок, создавая тем самым возможность их взаимодействия. Это означает, что измеряемое интерферометром смещение не является истинным смещением мембраны, так как оптическая длина пути будет изменяться как из-за перемещения пленки, так и из-за изменения коэффициента преломления вдоль луча лазера. Для учета этого эффекта в результаты измерения смещения надо было ввести относительно большую поправку, связанную главным образом с эффективным значением коэффициента преломления воды. Правильность введения этой поправки была подтверждена в линейном режиме плоской волны, используемом при низкочастотных калибровках [47], однако высокие значения амплитуд давления в нелинейных фокусированных полях приводят к возрастанию неопределенности значений коэффициента преломления. Акустооптическое взаимодействие является предметом дальнейших исследований, а неопределенность, связанная с изменениями коэффициента преломления в рассматриваемом диапазоне частот, оценена в этой методике как не превышающая 1 %. Оценка неопределенности из-за отклонения от условий плоской волны варьируется от 0,5 % на 5 МГц до 3 % на 40 МГц.
F.2.3.2.5 Суммарная неопределенность результатов измерений
Составляющие неопределенности результатов измерений методом оптического интерферометра при калибровке на высоких частотах были рассмотрены в [50], оценка расширенной неопределенности варьируется от 7 % на 20 МГц до 11 % на 40 МГц.
Приложение G
(справочное)
Применение сигналов с различными волновыми формами
G.1 Краткий обзор
Калибровку гидрофона выполняют при его помещении в какое-либо заданное стационарное ультразвуковое поле. Характеристики этого поля могут быть различными в зависимости от волновой формы электрического сигнала возбуждения преобразователя, его конструкции (плоский, фокусирующий) и выбранного в этом поле положения калибруемого гидрофона. Различные варианты этих условий рассмотрены в разделах G.2 - G.5 и сведены в таблицу G.1.
Таблица G.1 - Варианты волновых форм сигналов и положений гидрофона, рассмотренных в настоящем приложении
|
Варианты положения гидрофона |
|||
|
а |
Узкополосный тональный импульс |
А |
В ближнем поле |
|
b |
Волновая форма с широкой полосой в результате нелинейного распространения узкополосного тонального импульса |
В |
В дальнем поле |
|
с |
Широкополосный импульс |
С |
В дальнем поле на большом расстоянии для получения нелинейных искажений |
|
d |
Качающаяся частота непрерывного сигнала в методе спектрометрии временных задержек |
D |
В геометрическом фокусе фокусирующего излучателя при линейном распространении |
|
е |
Качающаяся частота непрерывного сигнала при частотном анализе сигнала с временной селекцией (TGFA) |
Е |
В геометрическом фокусе фокусирующего излучателя при нелинейном распространении |
В дополнение к этим вариантам в разделе G.5 рассмотрены специальные условия калибровки в непосредственной близости к излучающей поверхности плоского преобразователя (вариант А, описанный в G.4.1).
G.2 Варианты волновых форм сигнала и расположение гидрофона при калибровке методом сравнения
Все результаты, получаемые в соответствии с рекомендациями этого раздела, относятся к какому-либо определенному значению ультразвуковой частоты. Они рассматриваются в зависимости от частоты и могут быть представлены в виде амплитуд спектра частот.
Варианты волновой формы и частотной идентификации:
a) узкополосный тональный импульс;
b) волновая форма с широкой полосой в результате нелинейного распространения узкополосного тонального импульса;
c) широкополосный импульс;
d) качающаяся частота непрерывного сигнала в методе спектрометрии временных задержек (СВЗ) - см. приложение Н;
e) качающаяся частота непрерывного сигнала при частотном анализе сигнала с временной селекцией (TGFA) [39].
Варианты положения гидрофона в ультразвуковом поле:
А - в ближнем поле;
В - в дальнем поле;
С - в дальнем поле на большом расстоянии для получения нелинейных искажений (в соответствии с вариантом волновой формы).
Поле плоского круглого преобразователя в общем случае можно рассматривать состоящим из волн двух типов: плоской волны от поверхности и неплоских волн, распространяющихся от краев преобразователя. Если гидрофон установлен по варианту А, т.е. так близко к преобразователю, что значения пути распространения этих волн будут различными, то эти волны можно отделить друг от друга. Выбором соответствующего времени (стробирования) можно выделить импульс плоской волны от поверхности. Если гидрофон установлен по вариантам В и С, т.е. на оси ультразвукового пучка в дальнем поле преобразователя, то разница между длинами пути, проходимыми этими компонентами ультразвуковой волны, мала, что неизбежно вызывает их взаимную интерференцию. Однако поле в целом будет носить характер плоской волны, ограниченной центральным лепестком определенного диаметра;
D - в геометрическом фокусе фокусирующего излучателя при линейном распространении;
Е - в геометрическом фокусе фокусирующего излучателя при нелинейном распространении.
При установке гидрофона по вариантам D и Е излучающий преобразователь должен быть сфокусирован так, чтобы в его геометрическом фокусе ультразвуковой пучок имел ту же форму, что и в дальнем поле несфокусированного преобразователя. Преимущество варианта D заключается в том, что излучатель создает условия, подобные тем, которые существуют при установке гидрофона по варианту В. Однако в варианте D из-за короткого пути распространения ультразвуковой волны значительно снижен эффект ее затухания.
Поле фокусирующего преобразователя, в геометрическом фокусе которого установлен гидрофон по варианту Е, характеризуется сильными нелинейными искажениями из-за высоких амплитуд возбуждения преобразователя. Преимущество варианта Е заключается в том, что из-за короткого пути распространения ультразвуковой волны значительно снижен эффект затухания как для основной частоты, так и для более высоких ее составляющих, а нелинейные искажения образуются за счет повышения амплитуды давления при фокусировке поля преобразователем.
Примечание - Предпочтение отдают только определенным комбинациям вариантов возбуждения преобразователя и установки гидрофона (хотя эти варианты используют до частоты 15 МГц или даже ниже): аВ [51], bС [52], [53], сА [54] и dB [55], [56], [22]. Возможны также и другие комбинации.
G.3 Варианты временной формы сигнала возбуждения и его частотных диапазонов
G.3.1 Использование узкополосного тонального импульса (вариант а)
В этом варианте используют прямоугольные тональные импульсы с частотой заполнения F и длительностью τ. Обычно в выходном сигнале гидрофона отсутствуют строго прямоугольные импульсы, скорее это сигналы с начальным и конечным переходными процессами, в идеале имеющие центральную часть с постоянной амплитудой. Импульс должен быть достаточно длительным, чтобы амплитуда сигнала с гидрофона достигла постоянного значения; его измеряют, например, с помощью калиброванного осциллографа. Полученный результат относится лишь к выбранной частоте.
Этот вариант возбуждения имеет следующие особенности:
- это одночастотный метод. Если необходимо иметь данные для нескольких частот, то измерения следует повторить и на этих частотах. Иногда это потребует смены преобразователей и их юстировки, что увеличивает трудоемкость калибровки;
- частотный диапазон излучающего преобразователя должен перекрывать требуемый частотный диапазон калибровки. На практике этот преобразователь должен быть демпфированным и широкополосным, соответствующим требуемому диапазону частот;
- преобразователь должен излучать ультразвуковые волны с амплитудами, достаточными для существенного превышения шумов гидрофона с учетом затухания ультразвука на пути распространения;
- если выходной сигнал гидрофона измеряют широкополосным прибором, то необходимо проверить содержание в сигнале гармонических составляющих, которые должны быть, по крайней мере, на 30 дБ ниже сигнала основной частоты.
Примечание - Если гармонические составляющие сигнала превышают этот предел (минус 30 дБ), то необходимо использовать полосовой фильтр с пропусканием на основной частоте сигнала или анализатор спектра, чтобы оценить вклад второй и более высоких гармоник, а затем выделить сигнал основной частоты.
G.3.2 Использование волновой формы с широкой полосой в результате нелинейного распространения узкополосного тонального импульса (вариант b)
Преобразователь возбуждают тональными импульсами с высокой амплитудой. Ультразвуковой сигнал распространяется на такое расстояние, пока его волновая форма, измеряемая на выходе гидрофона, установленного по варианту С или Е, не станет сильно асимметричной. Эта искаженная волновая форма характеризуется остроконечными полупериодами в фазе сжатия и пологими пиками в фазе разрежения. Гармонические составляющие спектра отстоят друг от друга на одинаковые промежутки, равные основной частоте, амплитуда которых спадает приблизительно как 1/n, где n - номер гармоники. Принимаемый сигнал подают на анализатор спектра или схему быстрого преобразования Фурье (БПФ) и получают результаты измерения на дискретных значениях частоты, соответствующих каждой гармонике.
Ультразвуковой излучатель может быть узкополосным, его резонансная частота находится ниже диапазона частот, требуемого для калибровки гидрофона. Однако эта резонансная частота не должна быть слишком низкой, чтобы не использовать гармонические составляющие, далеко отстоящие от основной частоты. Для частотного диапазона, относящегося к настоящему стандарту, в соответствии с требованиями МЭК 62127-3 к частотной характеристике гидрофонов основную частоту рассматриваемых преобразователей рекомендуется выбирать приблизительно равной 1 МГц. Преобразователь должен генерировать давление требуемых амплитуд, но при этом не слишком сильно нагреваться, так как это может привести к нестабильности температуры в измерительном баке (см. 6.2) и излучательной способности самого преобразователя. С этими проблемами можно справиться, выбрав более подходящий коэффициент заполнения импульсов.
G.3.3 Использование широкополосных импульсов (вариант с)
В этом варианте генерируют короткие широкополосные импульсы длительностью τ. Сигнал с выхода гидрофона подают на анализатор спектра. В этом случае частотное разрешение амплитуд в спектре равно обратной величине временного интервала измерения широкополосного импульса, а частотный диапазон, перекрываемый спектром, зависит от длительности импульса.
Излучающий преобразователь может быть демпфированным резонансным, основная часть спектра импульса которого определяется частотой резонанса по толщине активного элемента. Эта резонансная частота должна быть нижней частотой диапазона калибровки. Преобразователь может иметь и относительно большую толщину, если его возбуждают короткими импульсами тока, образуемыми при коротком замыкании высоковольтного источника. При этом для получения достаточно широкого спектра важной проблемой является быстрое включение высокого напряжения или тока. Толщина преобразователя определяет время задержки прихода механического импульса от задней поверхности преобразователя; слишком малое время может исказить результаты измерений.
G.3.4 Использование волн с качающейся частотой непрерывного сигнала в методе спектрометрии временных задержек (вариант d)
В этом варианте используют непрерывноволновой сигнал с линейной разверткой частоты в частотном диапазоне калибровки или с постоянной частотой качания. Выходной сигнал гидрофона подают на следящий узкополосный фильтр, развертка которого синхронизирована с разверткой сигнала возбуждения, но сдвинута относительно него на определенное значение частоты. Этот сдвиг частоты выбирают по времени распространения прямого ультразвукового сигнала от преобразователя до гидрофона, определяемому как отношение расстояния между ними к скорости звука, зависящей от температуры воды. Такая методика устраняет влияние отраженных сигналов и, в строгом смысле, всех остальных сигналов, время распространения которых отличается от времени распространения прямого сигнала.
Основным компонентом электронного оборудования при реализации этого варианта является специальный анализатор спектра, обеспечивающий выполнение всех указанных операций. Выходной сигнал гидрофона получают в виде непрерывной функции частоты, поэтому анализатор спектра должен работать во всем диапазоне частот калибровки.
Требования к частоте и амплитуде сигнала, генерируемого преобразователем, сходны с теми, которые указаны в G.3.1.
G.3.5 Развертка частоты непрерывноволнового сигнала с временной селекцией сигнала в его частотном представлении (вариант е)
Описание этой методики (обозначаемой как TGFA - Time Gating Frequency Analysis) приведено в [39].
G.4 Варианты установки гидрофона
G.4.1 Установка гидрофона в ближнем поле (вариант А)
Гидрофон устанавливают достаточно близко от преобразователя на оси пучка. Для настройки времени выборки (стробирования) используют сигнал на выходе гидрофона, соответствующий тональному или импульсному прямому сигналу непрерывной волны.
Соответствие преобразователя заданным требованиям следует проверить при наблюдении за выходным сигналом гидрофона при его перемещении в поперечном направлении вблизи оси пучка (см. G.5.2), удостоверившись, что все части излучающей поверхности преобразователя колеблются с одинаковой амплитудой и фазой. Калибровка в ближнем поле преобразователя рассмотрена в разделе G.5.
Геометрическое пространство, используемое для измерений этого типа, может быть оценено по длительности т тонально-импульсного или импульсного сигнала.
G.4.2 Установка гидрофона в дальнем поле (вариант В)
Примечание - Этот вариант применяют при возбуждении преобразователя только по вариантам а, с, d и е. Вариант установки гидрофона при возбуждении по варианту b рассмотрен в G.4.3.
Гидрофон устанавливают на оси пучка в дальнем поле преобразователя. Дальнее поле начинается от положения последнего максимума давления (по оси пучка), которое рекомендуется определять на верхней границе частотного диапазона калибровки. В этом случае это расстояние следует рассматривать как минимальное.
Теоретически последний максимум давления в поле плоского круглого
поршневого излучателя находится от него на расстоянии, равном ![]() Это
расстояние пропорционально частоте и существенно зависит от радиуса
преобразователя. Тем не менее длина акустического пути не должна в общем случае
превышать значений, равных нескольким дециметрам, чтобы избежать существенного
затухания ультразвука, и поэтому в этом случае следует выбирать излучатели
относительно малого диаметра.
Это
расстояние пропорционально частоте и существенно зависит от радиуса
преобразователя. Тем не менее длина акустического пути не должна в общем случае
превышать значений, равных нескольким дециметрам, чтобы избежать существенного
затухания ультразвука, и поэтому в этом случае следует выбирать излучатели
относительно малого диаметра.
G.4.3 Установка гидрофона в дальнем поле и при большой длине акустического пути для получения нелинейных искажений сигнала (вариант С)
Для использования волновой формы сигнала по варианту b,
приведенному в G.3.2, путь распространения сигнала должен быть существенно длинным,
чтобы получить значимые нелинейные искажения волновой формы сигнала и обеспечить
достаточно широкое пространственное распределение акустического давления, так
чтобы влияние эффекта пространственного усреднения было ниже установленного
уровня (см. приложение J). Это может быть достигнуто при
применении поршневых преобразователей относительно большого диаметра, область
ближнего поля которых ![]() может лежать в диапазоне от 200 до 400
мм [52]. Степень нелинейных
искажений сигнала в месте установки гидрофона обычно можно
характеризовать параметром нелинейных искажений σ,
значение которого зависит от амплитуды давления р0 на
излучателе и для плоской волны выражается как
может лежать в диапазоне от 200 до 400
мм [52]. Степень нелинейных
искажений сигнала в месте установки гидрофона обычно можно
характеризовать параметром нелинейных искажений σ,
значение которого зависит от амплитуды давления р0 на
излучателе и для плоской волны выражается как
![]() (G.1)
(G.1)
где β = 1 + В/(2А) - параметр нелинейности для воды (приблизительно равен 3,5 при значениях А и В, приведенных, например, в [57]);
ff - основная частота возбуждения сигнала, создающего нелинейные искажения;
z - расстояние между преобразователем и гидрофоном;
ρ - плотность измерительной жидкости (воды).
Для обеспечения оптимальных условий проведения калибровки методом сравнения значение σ должно быть равным 3. При этом значение амплитуды сигнала на основной частоте снижается на 6 дБ из-за потерь при нелинейном распространении [58]. Для этих значений σ волновая форма сигнала становится идеальной пилообразной, амплитуды ее гармоник в спектре уменьшаются как 1/n, где n - номер гармоники. Эта зависимость позволяет оценить амплитуды давления на высоких частотах, что важно и для оценки точности калибровки. Если поддерживаются условия, при которых σ = 3 (т.е. амплитуда давления в точке измерения составляет 50 % амплитуды давления р0 на излучателе), то можно рассчитать значение амплитуды давления на верхней частоте /диапазона гидрофона как 0,5р0ff/fu (отношение ff/fu по существу эквивалентно 1/n, где n - номер гармоники, соответствующей верхней частоте частотного диапазона гидрофона).
Примечание - При температуре воды 22 °С выражение (G.1) приводят к σ = 6,7p0ffz где р0 выражено в мегапаскалях, ff - в мегагерцах, a z - в метрах.
Эти приближенные выражения предполагают наличие условий плоской волны и отсутствие потерь при распространении волны. Для более точных расчетов можно учесть фокусировку, соответствующую поршневым излучателям [58]. Предположение об отсутствии потерь при распространении волны верно при σ/(αz) >> 1, где α - амплитудный коэффициент затухания плоской волны с малой амплитудой в воде, пропорциональный квадрату частоты (значения α приведены в приложении Е). Этому критерию обычно удовлетворяют сигналы с более низкими основными частотами, например 1 или 2 МГц. Для более высоких частот σ/(αz) @ 1, и затухание сигналов малой амплитуды на основной частоте будет ограничено искажениями, которые снижают амплитуды гармонических составляющих, изменяя тем самым амплитудный коэффициент затухания плоских волн в воде.
В некоторых случаях при использовании варианта С рекомендуется исследовать осевую зависимость амплитуд частотных составляющих нелинейного поля, чтобы найти оптимальное расстояние для установки гидрофона в соответствии с рекомендациями этого подраздела. Это положение должно соответствовать максимальному отношению сигнал/шум для верхней граничной частоты калибровки fu.
G.4.4 Установка гидрофона в геометрическом фокусе излучателя при его низком или линейном возбуждении (вариант D)
Примечание - Такая установка применима только при возбуждении преобразователя по вариантам а, с, d и е. Об установке гидрофона при возбуждении по варианту b см. G.4.3.
Гидрофон устанавливают на оси пучка в геометрическом фокусе излучателя [59]. Если фокусное расстояние F преобразователя не известно из геометрических представлений, то его можно определить по расстоянию zpf до места нахождения фокуса давления (находящегося в месте нахождения максимума интеграла квадратов давления в импульсе по оси пучка) из выражения
 (G.2)
(G.2)
При условии линейного распространения параметр нелинейности распространения σт (см. МЭК 62127-1) для фокусирующих преобразователей должен быть меньше 1.
G.4.5 Установка гидрофона в геометрическом фокусе излучателя при его высоком возбуждении для получения нелинейных искажений (вариант Е)
Гидрофон устанавливают на оси пучка в геометрическом фокусе излучателя. Если фокусное расстояние F преобразователя не известно из геометрических представлений, то его можно определить по месту нахождения фокуса давления в условиях линейного возбуждения, как это показано в G.4.4. Для получения существенных нелинейных искажений параметр нелинейности распространения σт должен быть ≥ 3.
G.5 Специальные случаи калибровки вблизи поверхности преобразователя
G.5.1 Общие требования
Осевое расстояние z между гидрофоном и ультразвуковым преобразователем должно быть
![]() (G.3)
(G.3)
так чтобы ни один импульс, отраженный от гидрофона к преобразователю и назад к гидрофону, не интерферировал с концом первоначального импульса, падающего на гидрофон.
G.5.2 Влияние краевых волн
Рассматривают плоский круглый излучающий преобразователь радиуса at, точку
Р в поле, расположенную на осевом расстоянии z от
преобразователя и на расстоянии аp от оси пучка (см. рисунок G.1).
Длина акустического пути плоской волны от преобразователя до точки - z. Длина самого короткого акустического пути волны от края
преобразователя (краевой волны), обозначенная на рисунке G.1 как
r,
составляет ![]() Основным является
требование, чтобы τ не превышало
разность между временем прихода в точку Р краевой и плоской волн. Это
приводит к неравенству
Основным является
требование, чтобы τ не превышало
разность между временем прихода в точку Р краевой и плоской волн. Это
приводит к неравенству
 (G.4)
(G.4)
которое можно преобразовать в неравенство
![]() (G.5)
(G.5)
определяющее используемую область около оси пучка.

1 - преобразователь; 2 - плоскость измерения гидрофоном; аt - радиус круглого плоского преобразователя; z - осевое расстояние от преобразователя, длина пути прямого сигнала плоской волны; Р - точка в поле; аР - поперечное расстояние от оси пучка; r - длина пути распространения краевой волны
Рисунок G.1 - Координаты точки Р в ближнем поле круглого плоского излучающего преобразователя радиусом at
Примечание - В зависимости от конкретного набора параметров может оказаться, что неравенство, определяемое по выражению (G.5), не будет иметь решения (формально это означает, что оно выражается отрицательным числом), что означает, что проведение таких измерений невозможно. В этом случае следует уменьшить длительность т тонально-импульсного или импульсного сигнала и/или расстояние r до гидрофона. Условие выполнения неравенства (G.5), означающее возможность проведения измерений этого типа, можно представить в виде
G.5.3 Возможное влияние поверхностных волн
Поле плоских волн вблизи преобразователя может быть также возмущено волнами других типов. Прежде всего, это поверхностные волны, вызываемые радиальными колебаниями активного элемента при импульсном возбуждении. Когда радиальная волна начинается от края элемента и движется внутрь к его центру со скоростью vt, большей чем скорость звука c в звукопроводящей среде, то излучаемое в жидкость поле этих волн может достигнуть гидрофона и вызвать на его выходе искаженный сигнал, зависящий от положения гидрофона в поле [60], [61]. Эти искажения в значительной степени зависят от скорости vt. В общем случае нет каких-либо предварительных данных о количественном влиянии этого эффекта, и поэтому нельзя дать общих рекомендаций по этому поводу. В каждом конкретном случае рекомендуется проводить экспериментальные исследования [60]. Далее приведены формулы, аналогичные выражениям (G.4) и (G.5), которые используют, если vt известна.
G.5.4 Влияние поверхностных волн на поле вблизи преобразователя
Приведенные ниже рассуждения справедливы для плоского круглого преобразователя, показанного на рисунке G.1. Рассмотрим пространство, ограниченное конусом (симметричным относительно оси пучка), основанием которого является круглая излучающая поверхность преобразователя, а вершиной - точка на оси пучка на расстоянии z2,
 (G.7)
(G.7)
где vt - скорость распространения радиальной волны в пластине преобразователя.
Образующая линия этого круглого конуса представляется уравнением
 (G.8)
(G.8)
В точки (z, aP) этого пространства будут приходить две поверхностные волны: одна распространяется от ближайшей точки периметра преобразователя, а другая - от самой дальней [60], [61]. К оси эти волны приходят одновременно.
Во все точки этого конического пространства ближайшая поверхностная волна будет приходить быстрее, чем краевая волна, поэтому рекомендуется проанализировать ее влияние в рассматриваемом коническом пространстве.
В отличие от краевых волн поверхностные волны не существуют во всех точках поля. Вне конического пространства поверхностные волны или не существуют, или приходят позже краевой волны, и поэтому нет необходимости рассматривать их в настоящем стандарте.
Внутри конического пространства, определенного выше, основным требованием при учете поверхностных волн является длительность τ тонально-импульсного или импульсного сигнала, которая не должна превышать разности значений времени прихода ближайшей поверхностной волны и плоской волны. Время tH, за которое ближайшая поверхностная волна приходит в точку Р, равно
 (G.9)
(G.9)
Поэтому по аналогии с выражениями (G.4) и (G.5) длительность импульса должна быть
 (G.10)
(G.10)
и
 (G.11)
(G.11)
Это неравенство имеет положительное решение, если
 (G.12)
(G.12)
G.5.5 Место установки гидрофона в ближнем поле плоской волны с учетом воздействия краевых и поверхностных волн
Допустим, что гидрофон установлен на осевом расстоянии z от круглого плоского преобразователя радиусом at (см. рисунок G.1), излучающего тонально-импульсные или импульсные сигналы длительностью τ.
Определены критерии выбора расстояния z относительно четырех его опорных значений, три из которых обозначены как z1, z2 и z3 в выражениях (G.6), (G.7) и (G.12) соответственно, а четвертое определено в виде
 (G.12)
(G.12)
Далее рассмотрены возможности установки гидрофона в соответствии с этими критериями.
a) При z ≥ z1 рассматриваемые измерения невозможны из-за нарушения требования к акустической длине пути краевой волны.
b) При z < z1 и z ≥ z2 измерения можно выполнить при установке гидрофона в приосевой области, определяемой выражением (G.5).
c) При z < z1, z < z2 и z ≥ z3 измерения невозможны из-за нарушения требования к акустической длине пути поверхностной волны.
d) При z < z1, z < z2, z < z3 и z > z4 измерения можно выполнить при установке гидрофона в приосевой области, определяемой выражением (G.5).
e) При z < z1, z < z2, z < z3 и z < z4 измерения можно выполнить при установке гидрофона в приосевой области, определяемой выражением (G.11).
Следует учесть, что в приосевой области должна находиться вся чувствительная поверхность гидрофона так, чтобы R представлял собой сумму радиуса гидрофона и расстояния от его центра до оси пучка.
Необходимо также отметить, что все приведенные выше случаи установки гидрофона получены на основании общего требования, представленного выражением (G.3).
Приложение Н
(справочное)
Метод спектрометрии временных задержек - требования к выполнению измерений
Н.1 Общие положения
Метод спектрометрии временных задержек (СВЗ, на английском языке - Time Delay Spectrometry - TDS) впервые был предложен для измерения характеристик громкоговорителей при наличии акустических отражений [62]. Позднее его применили для калибровки гидрофонов в мегагерцовом диапазоне частот [55]. В [63] дан всесторонний анализ особенностей метода СВЗ и приведены результаты исследований, обосновывающих требования к установке и измерительной аппаратуре для практической реализации данного метода. В [56] показано совместное использование для абсолютной калибровки гидрофонов методов СВЗ и взаимности, множество результатов такой калибровки представлено в [64]. Преимущества перехода от временного к частотному разрешению рассмотрены в [22].
В приложении рассмотрены наиболее важные требования к проведению калибровки методом СВЗ.
Н.2 Калибровка ультразвуковых гидрофонов и определение их характеристик методом спектрометрии временных задержек
Н.2.1 Измеряемые параметры ультразвукового поля
Первичным параметром, измеряемым методом СВЗ, является акустическое давление. Значения амплитуды давления записывают одновременно с электрическим напряжением на выходе гидрофона. Из отношения напряжения и соответствующего давления определяют чувствительность гидрофона на конце кабеля под нагрузкой в виде непрерывной частотной зависимости.
Н.2.2 Диапазон ультразвуковых частот, в котором можно применять метод СВЗ
Этот метод используют как в диапазоне слышимого звука (примерно от 20 Гц), так и в диапазоне, характерном для биомедицинских исследований (от 1 до 40 МГц). Наиболее успешной оказалась реализация этого метода на частотах от 100 кГц до 1 МГц.
Частотные ограничения метода связаны с:
a) частотным диапазоном применяемых измерительных приборов;
b) возможностью применения калиброванного гидрофона сравнения в требуемом частотном диапазоне (при калибровке методом замещения).
Примечание - Модифицированный метод СВЗ позволяет проводить калибровку на частотах до и не менее чем 60 МГц [39].
Н.2.3 Структура ультразвукового поля, в котором можно применять метод СВЗ
Поле плоских волн (непрерывных с качающейся частотой).
Н.2.4 Пространственное разрешение
Выходной сигнал гидрофона представляют в виде спектра частот измеряемой волновой формы. Разрешение по выборке зависит от отношения ширины полосы фильтрации к скорости качания частоты. В общем случае неопределенность частотного разрешения выражается как
f = 1/tTDS, (H.1)
где f - частота, Гц;
tTDS - время, требуемое для одного измерения методом СВЗ, с.
Применение метода СВЗ позволяет получить как частотную характеристику чувствительности гидрофона, так и характеристику его направленности [55] - [57], [63] - [65].
Н.2.5 Разрешающая способность метода
Возможность определения изменения в чувствительности гидрофона зависит от уровня сигнала на его выходе. При значениях амплитуды акустического давления около 1 кПа можно обычно достичь значения отношения сигнал/шум около 50 дБ. Максимально достижимое значение отношения сигнал/шум - порядка 75 дБ. При этом возможно определить значения изменения чувствительности гидрофона, примерно равные 0,2 дБ.
Н.2.6 Диапазон измерения чувствительности гидрофона
Чувствительность на конце кабеля гидрофона под нагрузкой и чувствительность холостого хода на конце кабеля гидрофона можно измерить в диапазоне от минус 300 дБ относительно 1 В/мкПа (т.е. около 1 ∙ 10-9 В/Па).
Н.2.7 Воспроизводимость (повторяемость) результатов калибровки
Разброс значений результатов при повторных калибровках гидрофонов с чувствительностью, большей 3 нВ/Па, в частотном диапазоне от 0,1 до 10 МГц обычно не превышает ±5 %.
Н.2.8 Импульсная характеристика
Импульсную характеристику сигнала гидрофона можно получить с помощью преобразования Фурье частотной характеристики сигнала, если была записана фаза сигнала при измерении методом СВЗ. При этом разрешение импульсной характеристики соответствует частотному диапазону записи сигнала [66].
Н.2.9 Процедура измерений
Типичные процедуры измерений методом СВЗ рассмотрены в [22], [55], [56], [63], [64], [66], а их краткий обзор приведен в разделах Н.3 и Н.4.
Н.3 Процедура измерений (определения чувствительности сличением)
a) Устанавливают и ориентируют излучатель и приемник (предварительно калиброванный гидрофон [15], [66], [67]) в баке с дистиллированной дегазированной водой, температура которой поддерживается с точностью до ±0,5 °С.
b) Измеряют спектр сигнала в логарифмическом масштабе в выбранном частотном диапазоне.
c) Сохраняют в памяти измерительного устройства измеренный спектр (частотную характеристику).
c) Заменяют опорный (калиброванный) гидрофон калибруемым.
d) Повторяют операции по а), b) и с).
Примечание - Калибруемый гидрофон должен быть установлен в ту же самую точку поля, в которой прежде находился опорный, это можно проверить двумя способами: а) используя импульсный режим возбуждения излучателя, отрегулировать осевое расстояние до гидрофона так, чтобы время задержки прихода сигнала на оба гидрофона было одинаковым. Затем, перемещая гидрофон в поперечном направлении, добиться максимального сигнала на его выходе; или b) в режиме СВЗ установить время задержек таким же, как и при измерениях опорного гидрофона, а затем перемещениями калибруемого гидрофона добиться максимального сигнала на его выходе.
f) Дают графическое представление разности обоих спектров в логарифмическом масштабе. Если опорный гидрофон имеет плоскую частотную характеристику, эта разность будет представлять частотную зависимость калибруемого гидрофона. Более подробно см. в [22], [55], [56], [62] - [64].
Примечание - Для калибровки, как методом сравнения, так и методом взаимности можно использовать технологию спектрометрии временных задержек. Более подробно см. в [22], [56]. Однако для калибровок методом сравнения необходимо иметь опорный гидрофон с известной частотной характеристикой в виде непрерывной функции частоты.
Н.4 Процедура измерений при калибровках методом взаимности
Калибровка методом взаимности требует использования достаточно сложной измерительной установки и специальных приборов. В особенности это относится к широкополосной мостовой схеме, которая обеспечивает разделение излучаемого и приемного сигналов, а также к нагрузке, эквивалентной широкополосному излучателю. Вместо эквивалентной нагрузки можно использовать второй идентичный излучатель. Подробнее см. в [22], [56]. Неопределенность результатов калибровки при совместном использовании методов взаимности и СВЗ в диапазоне частот от 2 до 15 МГц не превышает 10 %. Ниже 2 МГц и выше 15 МГц неопределенность возрастает приблизительно до 20 %, что в первую очередь связано с уменьшением отношения сигнал/шум.
Н.5 Ограничения
Основное ограничение применения метода СВЗ связано с предположением, что среда распространения является нерассеивающей. Но это не имеет какого-либо значения, если калибровку проводят в дегазированной и деионизированной воде.
Приложение I
(справочное)
Определение фазовых характеристик гидрофонов
I.1 Краткий обзор
Измерения высокочастотных или искаженных (из-за нелинейности) волновых форм часто затруднены вследствие неидеальности характеристики преобразования используемого гидрофона. Правильные результаты можно получить при обратной свертке измеренных волновых форм, используя при этом комплексное значение функции преобразования огибающей частотную область (см. МЭК 62127-1). В дополнение к амплитудной чувствительности гидрофона, измеряемой в процессе его калибровки, эта процедура требует определения и фазовой чувствительности. В этом приложении рассмотрены современные методы определения фазовой характеристики гидрофонов.
В общем случае как чувствительность гидрофона на конце кабеля под нагрузкой, так и чувствительность холостого хода на конце кабеля гидрофона являются комплексными величинами, которые можно выразить амплитудой и фазой. Амплитуду определяют при калибровке гидрофона давно известными методами калибровки (см., например, раздел 5 настоящего стандарта). Определение фазы требует, во-первых, когерентной выборки значений амплитуды и фазы в процессе измерений, и, во-вторых, наличия эталона фазы с плоской или, по меньшей мере, хорошо известной фазовой характеристикой, откалиброванного первичным (абсолютным) методом или фазовая характеристика которого известна заранее.
Примечание - «Абсолютная» калибровка по фазе сопровождается рядом трудностей технического характера и не столь необходима в большинстве случаев. Под «абсолютной» здесь подразумевают калибровку «по эталонному источнику с идеально плоской фазовой характеристикой».
Для определения фазовой характеристики гидрофонов можно применить установки для калибровки по амплитуде, если обеспечить их возможностью когерентного приема. Однако фазовые измерения более чувствительны к изменению условий окружающей среды и к точности установки расстояния между гидрофоном и преобразователем. На частоте 20 МГц изменение температуры воды на 10 мК приводит к изменению фазы, равному 10°, на длине 100 мм. В связи с тем, что температуру воды не удается поддерживать постоянной в этом диапазоне длительное время, требуется, чтобы все измерения продолжались не более нескольких секунд. Поточечная процедура сбора данных, используемая, например, в методах взаимности или оптической интерферометрии, непригодна из-за большой длительности каждого цикла измерений. Следует учесть также, что смещение гидрофона на 2 мкм вдоль оси распространения волны приводит к изменению фазы, равному 10°, на 20 МГц, что подтверждает жесткость требований к точности установки гидрофона.
Ниже рассмотрены три методики, успешно применяемые для калибровки по фазе в различных лабораториях. Изложены принципы работы соответствующих установок с результатами измерений, приведены ограничения их применения, а также источники неопределенности результатов измерений.
I.2 Метод спектрометрии когерентных временных задержек
I.2.1 Принцип работы
В методе спектрометрии временных задержек для обеспечения условий свободного поля во время калибровки используют конечное время распространения ультразвука в среде [56], [62], [63], [68]. Излучаемая преобразователем волна давления достигает гидрофона через какой-либо промежуток времени, за который мгновенное значение частоты принимаемого гидрофоном сигнала смещается относительно частоты напряжения возбуждения, прикладываемого к преобразователю во время качания (развертки) частоты между fStart и fStop, на
![]() (I.1)
(I.1)
где tS - время развертки (качания частоты);
l - расстояние между гидрофоном и преобразователем;
c - скорость звука в среде (обычно воде).
Если для генерирования напряжения возбуждения и для приема сигнала с выхода гидрофона используют анализатор, который может работать в частотном промежутке между этими двумя сигналами, то с помощью узкополосного фильтра промежуточной частоты выбирают длину распространения акустического сигнала. Если частота смещения установлена равной Δ, то можно выделить прямой сигнал от излучателя к гидрофону и отстроиться от сигналов, отраженных от стенок бака.
При реализации когерентного приема для генерирования и приема сигналов используют сетевой анализатор. Фиксированное фазовое отношение между излучаемым и принимаемым сигналом обеспечивается схемой гетеродина с отдельным смесителем и схемой синхронизации [гетеродинный метод спектрометрии временных задержек - ГСВЗ (на английском языке - HTDS)] [69]. Сетевой анализатор работает в режиме сдвига частоты генератора до 50 МГц. Другой смеситель обеспечивает сигнал возбуждения преобразователя. При одинаковом возбуждении выполняют два измерения: первое с опорным гидрофоном, а второе - с калибруемым. В результате сравнения результатов этих измерений получают частотную характеристику чувствительности гидрофона.
Другой способ отстройки от нежелательных сигналов основан на использовании не частотной, а временной области, т.е. различного времени распространения сигналов [39], [69]. Сначала определяют частотную зависимость канала передачи системы преобразователь-гидрофон при непрерывно увеличивающейся частоте возбуждения от fStart до fStop. Затем с помощью обратного преобразования Фурье переводят частотную зависимость полученного сигнала во временную область. В результате такой обработки прямой и отраженные сигналы будут представлены на шкале времени, каждый со своим временем распространения. Затем устанавливают строб в соответствии с временем распространения прямого сигнала t' = l/c и убирают нежелательные сигналы.
I.2.2 Результаты
Когерентный метод СВЗ можно применять при калибровке по фазе любых гидрофонов. На рисунке I.1 показаны результаты измерений этим методом фазы двух мембранных гидрофонов из пленки толщиной 25 мкм с диаметром активного элемента 1 мм. Изменение фазы вызвано влиянием резонанса по толщине мембраны: для однослойного - на 40 МГц (непрерывная кривая), для двухслойного - на 22 МГц (точечная кривая).
Примечание - Суммарная толщина мембраны биламинарного (двухслойного) гидрофона составляет 50 мкм, а копланарного (однослойного) - 25 мкм.
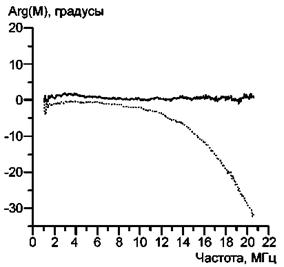
Рисунок I.1 - Чувствительность холостого хода по фазе на конце кабеля двух мембранных гидрофонов: однослойного (непрерывная кривая) и двухслойного (точечная кривая)
I.2.3 Неопределенности результатов измерений
Неопределенности результатов измерений зависят от многих параметров. Однако наиболее значимым из них является погрешность определения расстояния между преобразователем и гидрофоном. Она определяется главным образом точностью установки гидрофона и флуктуациями температуры в процессе измерений. В таблице I.1 приведены значения расширенной неопределенности результатов калибровки гидрофона зондового типа.
Таблица I.1 - Значения неопределенности результатов калибровки по фазе методом ГСВЗ зондового гидрофона диаметром 0,2 мм (при доверительной вероятности 95 % и коэффициенте охвата k = 2)
|
Неопределенность, градусы |
|
|
2 - 5 |
15,9 |
|
5 - 12 |
8,8 |
|
12 - 20 |
13,0 |
|
20 - 30 |
19,1 |
|
30 - 40 |
25,0 |
Примечание - Существенность абсолютных значений неопределенности фазы не полностью ясна до сих пор. При операции обратной свертки сдвиг как постоянной, так и частотно-зависимой фазы не имеет смысла, а интересно лишь значение отклонения «второго порядка».
I.2.4 Ограничения
Методы, основанные на СВЗ, могут быть применены для фазовой калибровки любых гидрофонов. Важно использовать подходящие излучатели, чтобы получить требуемое отношение сигнал/шум. В связи с тем, что это вторичный метод калибровки, то для получения абсолютных значений амплитуды и фазы необходим эталонный фазовый приемник.
I.3 Аппаратура для калибровки по импульсу с помощью оптического многослойного гидрофона
I.3.1 Принцип работы
Методы, основанные на СВЗ, обеспечивают определение только относительных значений чувствительности по фазе. Для получения абсолютных значений необходимо использовать эталонный фазовый приемник, который калиброван абсолютным методом или фаза которого известна заранее. Оптический многослойный гидрофон имеет идеально плоскую частотную зависимость чувствительности по амплитуде [70], и есть основания полагать, что частотная зависимость его фазовой характеристики тоже плоская. Поэтому его можно применить в качестве эталонного фазового приемника.
Оптический многослойный гидрофон состоит из стеклянной подложки, покрытой диэлектрическими оптическими слоями [70] - [72]. Эти слои формируют микроинтерферометр, оптическая отражательная способность которого очень чувствительна к изменениям толщины и коэффициента оптического преломления слоев. При попадании на гидрофон звуковой волны звуковое давление деформирует слои, меняя их коэффициент преломления. Эти изменения легко измерить на простой установке, состоящей из He-Ne-лазера, двух линз и фотодетектора. Подложку устанавливают по отношению к лучу так, чтобы добиться оптического резонанса, при котором длина волны, соответствующая рабочей частоте приемника, равна длине волны лазерного излучения. Из-за конечной толщины стеклянной подложки акустические отражения от ее задней поверхности оказываются вне промежутка времени, необходимого для измерений, и это позволяет использовать приемник при измерениях коротких импульсов.
Оптический многослойный гидрофон принимает короткие импульсы звуковой волны с нелинейными искажениями, излучаемые фокусирующим преобразователем, возбуждаемым генератором импульсов. Выходное напряжение на фотодетекторе пропорционально звуковому давлению, этот сигнал можно подать на цифровой осциллограф и сохранить в компьютере. После обработки в компьютере с помощью быстрого преобразования Фурье можно получить частотный спектр измеренного сигнала. Измерения повторяют при различных условиях согласования преобразователя с генератором, немного смещая основную частоту и гармонические составляющие импульсов, чтобы перекрыть весь частотный диапазон измерений сигналом достаточной мощности. Следует заметить, что как основная частота, так и ее гармоники являются не узкополосными линиями в спектре, а достаточно широкополосными компонентами со множеством спектральных составляющих. Частотную характеристику чувствительности гидрофона по фазе можно получить из двух измерений, в первом из которых участвует оптический гидрофон в качестве опорного, а во втором - калибруемый гидрофон.
I.3.2 Результаты
В качестве примера на рисунке I.2 показаны фазовая характеристика зондового гидрофона диаметром 0,2 мм, измеренная на рассмотренной выше импульсной установке с помощью оптического многослойного гидрофона (непрерывная кривая). Для сравнения на этом же рисунке точечной кривой показаны результаты измерений того же самого гидрофона методом ГСВЗ с использованием того же самого опорного гидрофона.
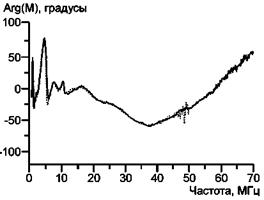
Рисунок I.2 - Чувствительность холостого хода по фазе на конце кабеля мембранного гидрофона с активным элементом 0,2 мм, измеренная импульсным методом (непрерывная кривая) и методом ГСВЗ (точечная кривая)
I.3.3 Неопределенности
Процедура обработки результатов с помощью быстрого преобразования Фурье затрудняет оценку неопределенности результатов калибровки из-за того, что процедура вычисления маскирует влияние многих источников этой неопределенности. Однако основной вклад в эту неопределенность дает, как и в методе СВЗ, неточность определения расстояния между преобразователем и гидрофоном. Значения неопределенности не слишком отличаются от данных таблицы I.1. Линейные составляющие фазовой характеристики (хотя они и не подлежат процедуре обратной свертки) можно минимизировать с помощью взаимно-корреляционной обработки [72].
Примечание - О значениях неопределенности фазы см. примечание к I.2.3.
I.3.4 Ограничения
Из-за конечной толщины стеклянной подложки оптического многослойного гидрофона он может быть использован для измерений коротких импульсов акустического поля. Это определяет нижнюю границу частотного диапазона такого гидрофона значениями около 500 кГц. Для получения достаточно высоких частот, необходимых для операции обратной свертки, требуется сильно сфокусированное поле импульсов с нелинейными искажениями, что ограничивает размер активного элемента гидрофонов, диаметр которого должен быть меньше 0,5 мм. Однако в сочетании с методом ГСВЗ метод калибровки по импульсу обеспечивает весь спектр услуг по калибровке как пьезоэлектрических, так и оптических гидрофонов.
I.4 Моделирование нелинейного распространения импульсов
I.4.1 Принцип работы
В установках, рассмотренных в разделах I.2 и I.3, калибровку по фазе осуществляют сравнением с эталонным (или опорным) гидрофоном. Альтернативой этому может быть использование звукового поля в качестве опорного поля с известными параметрами, вычисляемыми теоретически. Однако в этом случае следует убедиться, что экспериментальное звуковое поле совпадает с его теоретическим представлением.
Одной из возможных реализаций этого подхода является использование эффекта нелинейного распространения импульсной волны [73]. Преобразователь в виде одиночного элемента генерирует поле коротких акустических импульсов, фокусированное на отдаленном расстоянии. В результате нелинейного распространения в сигнале образуется несколько гармонических составляющих с определенной фазовой зависимостью от основной частоты, и эта зависимость может быть рассчитана из теоретических представлений. Если измерить относительные фазы гармоник и сравнить результаты этих измерений с теоретической моделью, то можно получить фазо-частотную характеристику измерительной системы в целом (не только одного гидрофона).
I.4.2 Ограничения
Установка с использованием нелинейного распространения импульсных сигналов позволяет получить фазовую характеристику измерительного тракта в целом. При этом фазовую характеристику гидрофона можно вычислить лишь в том случае, если известны фазовые характеристики всех остальных элементов измерительного тракта. Рекомендуется использовать такую модель распространения акустического сигнала, достоверность которой можно подтвердить соответствием с тем реальным полем, в которое установлен гидрофон.
Приложение J
(справочное)
Максимальный размер активного элемента гидрофона
J.1 Максимальный размер гидрофона для измерений в ближнем поле (при установке гидрофона по варианту А, см. приложение G)
Если гидрофон установлен в ближнем поле по варианту А приложения G, то его максимальный радиус ограничен только радиусом той области поля около оси преобразователя, которая используется в соответствии с G.4.1. Однако если при рекомендуемой проверке поперечного смещения гидрофона обнаружены изменения амплитуды сигнала на выходе гидрофона, то они должны быть меньше ±1 дБ при перемещении гидрофона на расстояние от оси, равное эффективному радиусу гидрофона, во всех поперечных направлениях.
J.2 Максимальный размер гидрофона для измерений в дальнем поле (при установке гидрофона по варианту В, см. приложение G)
На основании предположения о линейном распространении в дальнем поле, генерируемом плоским круглым поршневым преобразователем, можно дать следующую оценку для максимального радиуса гидрофона:
![]() (J.1)
(J.1)
Примечания
1 Эта
формула точна только при z >> at и ![]() (см. [2]), но вполне применима для
измерений, рассматриваемых в этом подразделе.
(см. [2]), но вполне применима для
измерений, рассматриваемых в этом подразделе.
2 В [2] теоретически обоснована процедура введения поправки для получения действительного значения амплитуды давления, согласно которой измеренное значение амплитуды давления умножают на (1 + δav), где δav вычисляют из выражения δav = [πa/(16amax)]2camax, получаемым из выражения (J.1). Но это применимо только тогда, когда гидрофон ориентирован в опорном направлении, т.е. когда поверхность его активного элемента перпендикулярна оси пучка.
3 Выражение (J.1) применимо и в случае установки гидрофона по варианту D (см. приложение G).
J.3 Максимальный размер гидрофона для измерений в дальнем поле на большом расстоянии для получения нелинейных искажений (при установке гидрофона по варианту С, см. приложение G)
Волновая форма сигнала в той точке поля, которую используют при сличениях различных методов, содержит множество гармонических составляющих основной частоты. Пространственное распределение давления для каждой из этих гармоник должно быть достаточно широким, чтобы пространственное усреднение давления на гидрофоне не оказывало существенного влияния на точность его калибровки. При правильном выборе диаметра преобразователя и расстояния до гидрофона можно добиться достоверной аппроксимации условий плоской волны на эффективной приемной апертуре гидрофона.
В связи с тем, что при увеличении номера гармоники ширина пучка постепенно уменьшается, особенно важно учитывать эффект пространственного усреднения на верхней границе fu частотного диапазона гидрофона. Влияние эффекта пространственного усреднения можно оценить по ширине пучка для самой высокой частотной составляющей, используя параметр γ, задаваемый выражением
![]() (J.2)
(J.2)
Примечания
1 В этом выражении фигурируют измеренные значения ширины пучка, при γ > 2 они примерно равны действительным значениям. При γ = 2 поправка на пространственное усреднение составляет около 7,5 %. При γ > 3 погрешность, связанная с пространственным усреднением, не превысит 3,5 %. Для того чтобы снизить допустимую погрешность до 2 %, необходимо, чтобы γ > 4 [74].
2 Максимальный радиус гидрофона рекомендуется определять из
выражения: amax = cz/(8fat). При ![]() это
соответствует γ = 2,8.
это
соответствует γ = 2,8.
Можно определить условия, ограничивающие предельные значения эффекта пространственного усреднения рекомендованным уровнем. Для этого следует допустить два предположения:
- ширина пучка на основной частоте искаженного импульса, используемого при проведении сличении, идентична той, которая была бы при линейном распространении волны.
Примечание - При постепенном увеличении значений σ пространственное распределение давления изменяется, что приводит к расширению профиля пучка для каждой гармоники [36]. Поэтому предлагаемый анализ представляет наихудший вариант с точки зрения оценки погрешности;
- ширина пучка для каждой из гармонических составляющих может быть представлена в виде wf/n-2, где wf - ширина пучка для основной частоты, a n - номер гармонической составляющей [75].
Если ff - основная частота возбуждения сигнала, использованная для получения нелинейных искажений, а fu - верхняя граница частотного диапазона гидрофона при его калибровке, то, предполагая излучатель идеальным плоским поршневым, можно получить выражение для минимального расстояния zmin между преобразователем и гидрофоном, требуемое для того, чтобы влияние пространственного усреднения не превышало рекомендуемого предельного уровня. Выражение для zmin, верное для больших значений kat, можно представить в виде
 (J.3)
(J.3)
где ah - эффективный радиус гидрофона;
k = 2πff/c - волновое число;
at - эффективный радиус ультразвукового преобразователя.
Это выражение можно использовать для вычисления приблизительных значений zmin, при наличии нелинейных искажений применимы и меньшие расстояния.
При использовании варианта bС (см. приложение G) следует исследовать содержание частотных составляющих волновой формы сигнала при различных расстояниях от оси пучка для того, чтобы убедиться в правильном представлении о характере пространственного распределения давления.
Примечание - Уравнение (J.3) может быть применено и для аh, определяющего максимальное значение радиуса гидрофона на каком-либо заданном расстоянии z.
Приложение ДА
(справочное)
Таблица ДА.1
|
Обозначение ссылочного международного стандарта |
Степень соответствия |
Обозначение и наименование соответствующего национального стандарта |
|
МЭК 60050-801:1994 |
- |
* |
|
МЭК 60565:2006 |
- |
* |
|
МЭК 61161:2006 |
IDT |
ГОСТ Р МЭК 61161-2009 «Государственная система обеспечения единства измерений. Мощность ультразвука в жидкостях. Общие требования к методикам выполнения измерений в диапазоне частот от 0,5 до 25 МГц» |
|
МЭК 61689:1996 |
IDT |
ГОСТ Р 8.583-2001 «Государственная система обеспечения единства измерений. Оборудование медицинское ультразвуковое терапевтическое. Общие требования к методикам выполнения измерений параметров акустического выхода в диапазоне частот от 0,5 до 5,0 МГц» |
|
МЭК 61828:2006 |
- |
* |
|
МЭК 62127-1:2007 |
IDT |
ГОСТ Р МЭК 62127-1-2009 «Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методикам выполнения измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц» |
|
МЭК 62127-3:2007 |
IDT |
ГОСТ Р МЭК 62127-3-2010 «Государственная система обеспечения единства измерений. Гидрофоны. Общие требования к характеристикам для измерений ультразвуковых полей в частотном диапазоне от 0,5 до 40 МГц» |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. |
||
Библиография
[2] Beissner K. Maximum hydrophone size in ultrasonic field measurements. Acustica, vol. 59, p. 61 - 66
[3] ISO Guide to the expression of uncertainty in measurement. Geneva, Switzerland, 1995
[4] Fay В., Lewin P.A., Ludwig G., Sessler G.M. and Yang G. The influence of spatial polarization distribution on spot poled PVDF membrane hydrophone performance. Ultrasound Med. Biol., 1992, vol. 18, no. 6 - 7, p. 625 - 635
[6] Radulescu E.G., Lewin P.A., Nowicki A. and Berger W.A. Hydrophones effective diameter measurements as a quasi-continuous function of frequency. Ultrasonics, 2003, vol. 41, iss. 8, p. 635 - 641
[7] Radulescu E.G., Wojcik J., Lewin P.A. and Nowicki A. Probing acoustic fields of clinically relevant transducers: the effect of hydrophone probes finite apertures and bandwidths. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., October 2004, vol. 51, iss. 10, p. 1262 - 1270
[8] Harris G.R., Gammell P.A., Radulescu E.G. and Lewin P.A. Interlaboratory evaluation of hydrophone sensitivity calibration from 0,1 to 2 MHz via time delay spectrometry. Ultrasonics, April 2004, vol. 42, iss. 1 - 9, p. 349 - 353
[9] Beissner K. On the plane-wave approximation of acoustic intensity. J. Acoust. Sos. Am., 1982, vol. 71, p. 1406 - 1411
[12] Beyer R.T. Nonlinear Acoustics. U.S. Government Printing Office, 1975
[13] Carstensen E.L. and Muir T.G. The role of nonlinear acoustics in biomedical ultrasound. In Greenleaf, J., ed., Ultrasound Tissue Characterization. Boca Ration: CRC Press, 1986, Ch. 3, p. 57 - 79
[14] Bjorno L. and Lewin P.A. Measurement of B/A parameter in tissues. In Greenleaf, J., ed., Ultrasound Tissue Characterization. Boca Raton: CRC Press, 1986, Ch. 6, p. 141 - 163
[15] Lewin P.A. Practical implementations and technology of measurement devices. In Ziskin M.C. and Lewin P.A., eds., Ultrasonic Exposimetry. Boca Raton: CRC Press, 1992, Ch. 7, p. 185 - 215
[16] Duck F.A. and Martin K. Exposure values for medical devices. In Ziskin M.C. and Lewin P.A., eds., Ultrasonic Exposimetry. Boca Raton: CRC Press, 1992, Ch. 11, p. 315 - 344
[19] Kraynak Т., Schafer M.E. and Krakhman V. Development of a cost-effective shock wave hydrophone. 1994 IEEE Ultrasonics Symposium Proceedings, p. 1805 - 1808
[20] Dodick J.M. Surgical instrument with input power transducer. US Patent №. 5324282
[21] Lewin P.A., Bhatia R., Zhang Q. and Dodick J. Characterization of optoacoustic surgical devices. IEEE Ultrasonics Symposium, 1995
[22] Schafer M.E. Techniques of hydrophone calibration. In Ziskin M.C. and Lewin P.A., eds., Ultrasonic Exposimetry. Boca Raton: CRC Press, 1992, Ch. 8, p. 217 - 255
[23] Trier H.G. Ultrasonic devices for surgery (cataract removal and viterectomy) in ophthalmology. J. d'Echographie Med. Ultrasonore, 1985, vol. 1, p. 17 - 23
[24] Beissner K. Schallfelduntersuchungen an ophthalmologisch-chirurgischen Ultraschallgeraeten. In Fortschritte der Akustik - DAGA'80. Berlin: VDE-Verlag, 1980, p. 567 - 570
[25] Schafer M.E. and Broadwin A. Acoustical characterization of ultrasonic surgical devices. 1994 IEEE Ultrasonics Symposium Proceedings, 1994, p. 1903 - 1906
[26] Meeks S. and Ting R. The evaluation of static and dynamic stress on the piezoelectric and dielectric properties of PVDF. J. Acoust. Soc. Am., 1984, Vol. 75, p. 1010
[27] Tancrell R.H., Wilson D.T. and Ricketts D. Properties of PVDF polymer for sonar. 1985 IEEE Ultrasonics Symposium Proceedings, 1985, p. 624 - 627
[28] Herman B.A. and Harris G.R. Calibration of miniature ultrasonic receivers using a planar scanning technique. J. Acoust. Soc. Am., 1982, vol. 72, p. 1357 - 1363
[29] Pinkerton J.M.M. The absorption of ultrasonic waves and liquids and its relation to molecular constitution. Proc. Phys. Soc, 1949, vol. 62, p. 129 - 141
[30] Corbett S.S. The influence of nonlinear fields on miniature hydrophone calibration using the planar scanning technique. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 1988, vol. 35, iss. 2, p. 162 - 167
[31] Radulescu E.G., Lewin P.A., Goldstein A. and Nowicki A. Hydrophone spatial averaging corrections from 1 - 40 MHz. IEEE Trans. Ultrason. Ferroelectr Freq. Contr., November 2001, vol. 48, iss. 6, p. 1575 - 1580
[32] Radulescu E.G., Lewin P.A. and Nowicki A. 1 - 60 MHz Measurements in Focused Acoustic Fields using Spatial Averaging Corrections. Ultrasonics, May 2002, vol. 40, iss. 1 - 8, p. 497 - 501
[33] AIUM/NEMA. Safety standard for diagnostic ultrasound equipment. (AIUM/NEMA Standard Publication No. UL 1-1981). Laurel M.D.: American Institute of Ultrasound in Medicine (AIUM); Rosslyn V.A.: National Electrical Manufacturers Association (NEMA)
[34] Bacon D.R., A new method for ultrasonic hydrophone calibration. 1982 IEEE Ultrasonics Symposium Proceedings, 1982, p. 700 - 704
[35] Lockwood J.C., Muir T.G. and Blackstock D.T. Directive harmonic generation in the radiation field of a circular piston. J. Acoust. Soc. Am., 1973, vol. 53, p. 1148 - 1153
[36] Del Grosso V.A. and Mader C.W. Speed of sound in pure water. J. Acoust. Soc. Am., 1972, vol. 52, p. 1442 - 1446
[37] Bilaniuk N. and Wong G.S.K. Speed of sound in pure water as a function of temperature. J. Acoust. Soc. Am., 1993, vol. 93, p. 2306
[38] Radulescu E.G., Wojcik J.P., Lewin P.A. and Nowicki A. Nonlinear propagation model for ultrasound hydrophones calibration in the frequency range up to 100 MHz. Ultrasonics, June 2003, vol. 41, iss. 4, p. 239 - 245
[39] Radulescu E.G., Lewin P.A., Wojcik J.P. and Nowicki A. Calibration of ultrasonic hydrophone probes up to 100 MHz using time gating frequency analysis and finite amplitude waves. Ultrasonics, June 2003, vol. 41, iss. 4, p. 247 - 254
[40] Bleeker H.J. and Lewin P.A. A new method of ultrasonic hydrophone calibration using KZK wave modeling. J. Acoust. Soc. Am., 1998, vol. 103, p. 2962
[41] Bleeker H.J. and Lewin P.A. A novel method for determining calibration and behavior of PVDF ultrasonic hydrophone probes in the frequency range up to 100 MHz. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., November 2000, vol. 47, iss. 6, p. 1354 - 1362
[42] Lewin P.A., Umchid S., Sutin A. and Sarvazyan A. Beyond 40 MHz frontier: the future technologies for calibration and sensing of acoustic fields. J. Phys.: Conf. Ser, 2004, vol. 1, p. 38 - 43
[43] Reibold R. and Molkenstruck W. Investigation of pulse-excited hydrophones for ultrasonic field measurements using laser interferometry. Ultrasonics, March 1987, vol. 25, iss. 2, p. 114 - 118
[45] Koch Ch., Ludwig G. and Molkensteuck W. Calibration of an interferometric fiber tip sensor for ultrasound detection. Ultrasonics, June 1997, vol. 35, iss. 4, p. 297 - 303
[46] Koch Ch. and Molkensteuck W. Primary calibration of hydrophones with extended frequency range 1 to 70 MHz using optical interferometry. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., September 1999, vol. 46, iss. 5, p. 1303 - 1314
[47] Bacon D.R. Primary calibration of ultrasonic hydrophone using optical interferometry. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. March 1988, vol. 35, iss. 2, p. 152 - 161
[48] Bacon D.R. and Robinson S.P. Intercomparison of 1 mm hydrophone calibrations in the frequency range 0,5 to 15 MHz. (Report EUR 13525 EN). Bureau Communautaire de Reference, Commission of the European Communities, 1991
[49] Robinson S.P., Bacon D.R. and Moss B.C. The measurement of the frequency response of a photodiode and amplifier using an opto-mechanical frequency response calibrator. Meas. Sci. Technol., 1990, vol. 1, p. 1184 - 1187
[50] Esward T.J. and Robinson S.P. Extending the frequency range of the National Physical Laboratory primary standard laser interferometer for hydrophone calibrations to 80 MHz. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., May 1999, vol. 46, iss. 3, p. 737 - 744
[51] Preston R.C., Bacon D.R., Livett A.G. and Rajendran K. PVDF membrane hydrophone performance properties and their relevance to the measurement of the acoustic output of medical ultrasonic equipment. J. Phys. E: Sci. Instrum., Vol. 16, p. 786 - 796
[52] Smith R.F. and Bacon D.R. A multiple-frequency hydrophone calibration technique. J. Acoust. Soc. Am., 1990, vol. 87, p. 2231 - 2243
[53] Bacon D.R. Nonlinear acoustics in ultrasound calibration and standards. In Hamilton M.F. and Blackstock D.T., eds., Frontiers of nonlinear acoustics. 12th ISNA. Elsevier, 1990, p. 3 - 19
[54] Harris G.R. and Shombert D.G. A pulsed near-field technique for measuring the directional characteristics of acoustic receivers. IEEE Transactions on Sonics and Ultrasonics, 1985, vol. 32, no. 6, p. 802 - 808
[55] Lewin P.A. Calibration and performance evaluation of miniature ultrasonic hydrophones using time delay spectrometry. 1981 IEEE Ultrasonics Symposium Proceedings, 1981, p. 660 - 664
[56] Ludwig G. and Brendel K. Calibration of hydrophones based on reciprocity and time delay spectrometry. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 1988, vol. 35, iss. 2, p. 168 - 174
[57] Beyer R.T. Parameter of nonlinearity in fluids. J. Acoust. Soc. Am., 1960, vol. 32, p. 719 - 721
[58] Muir T.G. and Carstensen E.L. Prediction of nonlinear acoustic effects at biomedical frequencies and intensities. Ultrasound Med. Biol., 1980, vol. 6, no. 4, p. 345 - 357
[59] Selfridge A. and Lewin P.A. Wideband Spherically Focused PVDF Acoustic Sources for Calibration of Ultrasound Hydrophone Probes. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., November 2000, vol. 47, iss. 6, p. 1372 - 1376
[60] Harris G.R., Carome E.F. and Dardy H.D. An analysis of pulsed ultrasonic fields as measured by PVDF spot-poled membrane hydrophones. IEEE Transactions on Sonics and Ultrasonics, September 1983, vol. SU-30, no. 5, p. 295 - 303
[61] Baboux J.C, Lakestani F. and Perdrix M. Theoretical and experimental study of the contribution of radial modes to the pulsed ultrasonic field radiated by a thick piezoelectric disk. J. Acoust. Soc. Am., 1984, vol. 75, p. 1722 - 1731
[62] Heyser R.C. Acoustical measurements by time delay spectrometry. J. Audio Eng. Soc, 1967, vol. 15, p. 370
[63] Pederson P.C., Lewin P.A. and Bjorno L. Application of time-delay spectrometry for calibration of ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 1988, vol. 35, iss. 2, p. 185 - 205
[64] Chivers R.C. Time-delay spectrometry for ultrasonic transducer characterization. J. Phys. E: Sci. Instrum., 1986, vol. 19, p. 834 - 843
[65] Gammell P.M. Time and frequency domain measurements of materials with high ultrasonic attenuation using time domain spectroscopy. In Thompson D.O. and Chimenti D.E., eds, Review of Progress in Quantitative NDE. Plenum Press, 1986, vol. 5, p. 759 - 656
[66] Lewin P.A. Miniature piezoelectric polymer ultrasonic hydrophone probes. Ultrasonics, September 1981, vol. 19, iss. 5, p. 213 - 216
[67] Lewin P.A. and Schafer M.E. Ultrasonic probes in measurement practice. Medical Device and Diagnostic Industry, 1986, vol. 8, no. 5, p. 40 - 45
[68] Gammell P.M. and Harris G.R. Time delay spectrometry for hydrophone calibrations below 1 MHz. J. Acoust. Soc. Am., 1999, vol. 106, L41-6
[69] Koch С. Amplitude and Phase Calibration of Hydrophones by Heterodyne and Time-gated Time-delay Spectrometry. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr., March 2003, vol. 50, iss. 3, p. 344 - 348
[70] Wilkens V. Characterization of an optical multilayer hydrophone with constant frequency response in the range from 1 to 75 MHz. J. Acoust. Soc. Am., 2003, vol. 113, p. 1431 - 1438
[71] Wilkens V. and Koch С. Optical multilayer detection array for fast ultrasonic field mapping. Opt. Lett., 1999, vol. 24, no. 15, p. 1026 - 1028
[72] Wilkens V. and Koch С Amplitude and phase calibration of hydrophones up to 70 MHz using broadband pulse excitation and an optical reference hydrophone. J. Acoust. Soc. Am., 2004, vol. 115, p. 2892 - 2903
[75] Du G. and Breazeale M.A. Harmonic distortion of a finite amplitude Gaussian beam in a fluid. J. Acoust. Soc. Am., 1986, vol. 80, p. 212 - 216
Ключевые слова: акустическое давление, гидрофон, метод взаимности, мощность ультразвука, оптическая интерферометрия, ультразвуковой преобразователь, ультразвуковой пучок, сканирование