ГОСТ Р 50609-93
(ИСО 5766-90)
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
МАШИНЫ
НАПОЛЬНОГО ТРАНСПОРТА.
ШТАБЕЛЕРЫ И ПОГРУЗЧИКИ
С ПЛАТФОРМОЙ
С БОЛЬШОЙ ВЫСОТОЙ
ПОДЪЕМА
МЕТОДЫ ИСПЫТАНИЯ НА УСТОЙЧИВОСТЬ
ГОССТАНДАРТ РОССИИ
Москва
ПРЕДИСЛОВИЕ
1 РАЗРАБОТАН Всероссийским научно-исследовательским проектно-конструкторским и технологическим институтом безрельсового электрифицированного транспорта с опытным производством (ВНИИэлектротранспорт)
ВНЕСЕН Техническим комитетом ТК 48 «Безрельсовый электрифицированный транспорт»
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 18.11.93 № 241
3 Настоящий стандарт подготовлен на основе применения аутентичного текста международного стандарта ИСО 5766-90 «Штабелеукладчики и автопогрузчики с платформой большой высоты подъема. Испытания на устойчивость» с дополнительными требованиями, отражающими потребности народного хозяйства (разд. 3 и 6).
4 ВВЕДЕН ВПЕРВЫЕ
СОДЕРЖАНИЕ
|
5 Методы испытаний на устойчивость. 2 7 Испытания на устойчивость машин с другими грузозахватными приспособлениями. 7 |
ГОСТ Р 50609-93
(ИСО 5766-90)
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
МАШИНЫ
НАПОЛЬНОГО ТРАНСПОРТА. ШТАБЕЛЕРЫ
И ПОГРУЗЧИКИ С ПЛАТФОРМОЙ С БОЛЬШОЙ ВЫСОТОЙ ПОДЪЕМА
Методы испытания на устойчивость
Floor-mounted flexible vehicles.
Pallet stackers and high-lift platform trucks.
Stability test methods
Дата введения 1995-01-01
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт устанавливает порядок проведения испытаний на устойчивость штабелеров и погрузчиков с платформой с высотой подъема свыше 5,6 м, управляемых водителем (далее - машины).
Стандарт распространяется на машины грузоподъемностью до 5000 кг с наклоняемым и ненаклоняемым грузоподъемником, платформой или вилами и на машины, оборудованные сменными грузозахватными приспособлениями.
Стандарт не распространяется на машины, оснащенные выдвижными грузоподъемником или вилами, а также устройствами, в которых подвешенный груз может свободно раскачиваться.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использована ссылка на стандарт: ГОСТ 25791-90 Тракторы и машины самоходные сельскохозяйственные. Контрольная точка сиденья. Метод определения.
3 ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
В настоящем стандарте применяются следующие обозначения и сокращения:
АВ - продольная плоскость симметрии машины
MN - линия опрокидывания машины
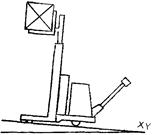
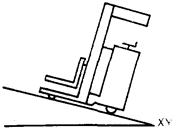
ХУ - ось наклона испытательной платформы
uQ - максимальная скорость передвижения машины в км/ч с максимальным грузом Q на ровной горизонтальной поверхности
u - максимальная скорость передвижения машины в км/ч без груза
i - максимальный уклон (не более 10 %), выраженный в %, который машина может преодолеть без груза.
4 ЦЕЛЬ ИСПЫТАНИЙ
Испытания, определенные настоящим стандартом, гарантируют, что машины обладают удовлетворительной устойчивостью при правильной эксплуатации в следующих рабочих условиях:
а) штабелирование выполняется при вертикальном положении грузоподъемника или горизонтальном положении вил, на производственных и складских площадях с твердым и ровным покрытием;
б) движение выполняется с наклоняемыми назад грузоподъемником или вилами, с грузом в опущенном (транспортном) положении, на производственных и складских площадях с твердым и ровным покрытием;
в) работы выполняются при расположении центра тяжести груза приблизительно на продольной плоскости симметрии машины.
4.2 Другие условия работы
Если условия работы отличаются от указанных в 4.1, то необходимо использовать:
а) или машину, соответствующую стандарту, для работы в специфических условиях;
б) или машину, показатели устойчивости которой определены соглашением между заинтересованными сторонами, и не должны быть ниже определенных для условий работы по 4.1.
5 МЕТОДЫ ИСПЫТАНИЙ НА УСТОЙЧИВОСТЬ
5.1 Требования к испытаниям
Устойчивость машины должна проверяться с помощью одного из приведенных ниже методов испытаний.
В спорных случаях в качестве арбитражного метода должен использоваться метод наклоняемой платформы.
5.2 Методы испытаний
5.2.1 Наклоняемая платформа
Для испытаний следует использовать платформу, которую можно наклонять в одну сторону. Машину необходимо установить на горизонтальной платформе в положении соответствующем номеру испытаний с соблюдением условий, указанных по 5.3. Затем при каждом испытании платформу следует медленно наклонять до значений указанных в таблице 2.
Машина считается достаточно устойчивой, если она проходит весь комплекс испытаний не опрокидываясь.
Предел устойчивости в этих испытаниях определяется величиной наклона испытательной платформы, увеличение которой вызывает опрокидывание машины.
При испытаниях на поперечную устойчивость (испытания № 3 и № 4) допускается отрыв одного из колес от платформы и касание части рамы (шасси) или других элементов конструкции машины с испытательной платформой.
5.2.2 Фиксированный наклон
Следует использовать фиксированные значения наклона испытательной платформы, соответствующие номеру испытаний. Поверхность платформы должна быть ровной и способной выдерживать массу установленной на нее машины без деформаций, которые могли бы повлиять на результаты испытаний.
Машина, подвергаемая испытаниям в соответствии с условиями, приведенными в 5.3, должна въезжать на платформу с фиксированным наклоном, с опущенным грузоподъемником (вилами) и занимать положение в соответствии с таблицей 2.
В каждом испытательном положении машины с испытательным грузом, груз должен подниматься медленно и плавно до высоты, указанной в таблице 2.
5.2.3 Расчеты
Пределы соответствия указанных величин устойчивости можно определить расчетным путем.
Значения наклона испытательной платформы, полученные расчетным путем, должны допускать для изготовителя незначительные изменения и отклонения грузоподъемника, шин и т.д.
5.3 Условия проведения испытаний
5.3.1 Состояние машины
Испытания следует проводить на машине в рабочем состоянии, но без водителя.
Для машин, управляемых водителем, для получения достоверных результатов испытаний, вместо водителя на машине должен находиться предмет массой 90 кг.
Для машин, управляемых стоящим водителем, предмет массой 90 кг должен быть закреплен таким образом, чтобы его центр тяжести находился на высоте 1000 мм от поверхности площадки водителя, по центру зоны, обычно занимаемой водителем.
Для машин, управляемых сидящим водителем, указанный предмет должен быть закреплен таким образом, чтобы его центр тяжести находился на высоте 150 мм над контрольной точкой сиденья (КТС), определяемой в соответствии с ГОСТ 25791, при среднем положении сиденья относительно возможных регулировочных перемещений.
Топливные баки машин с двигателями внутреннего сгорания должны быть заполнены, если при этом снижается устойчивость машины. Другие имеющиеся на машине резервуары также должны быть заполнены до необходимого в рабочих условиях уровня. Давление в шинах должно соответствовать значению, установленному изготовителем машины.
5.3.2 Положение машины на испытательной платформе
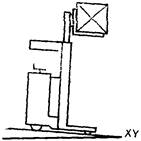
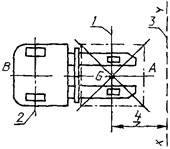
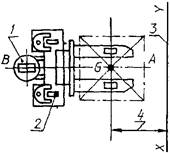
Для испытаний № 1 и № 2 машина должна быть установлена на испытательной платформе таким образом, чтобы ведущая (управляемая) ось и ось опорных роликов были параллельны оси наклона ХУ испытательной платформы (рисунки 7 и 8).
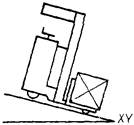
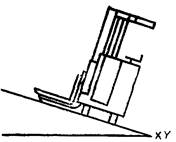
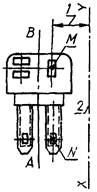
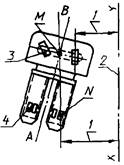
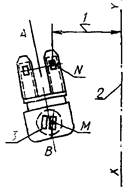
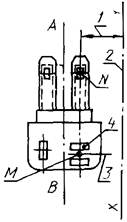
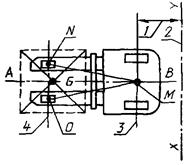
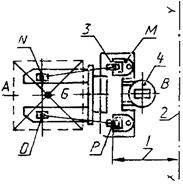
Для испытаний № 3 и № 4 машина должна быть установлена на испытательной платформе таким образом, чтобы линия MN была параллельна оси наклона ХУ испытательной платформы (рисунки 11 - 16).
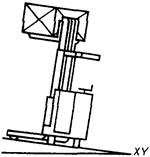
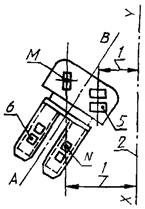
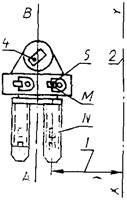
Для испытаний № 5 и № 6 машина должна быть установлена на испытательной платформе таким образом, чтобы продольная плоскость симметрии была перпендикулярна оси наклона ХУ испытательной платформы (рисунки 19 и 20).
На рисунке 13 управляемое колесо, расположенное ближе к оси наклона ХУ, должно быть параллельно ей. Положение управляемых колес для машин других конструкций показано на рисунках 11, 12, 14, 15 и 16.
Испытания на поперечную устойчивость должны проводиться с той стороны машины, по отношению к которой машина является наименее устойчивой. Точка N - это центральная точка зоны контакта между поверхностью испытательной платформы и опорным роликом, ближайшим к оси наклона ХУ (рисунки 11 - 16).
Положение точки М определяется следующим образом:
а) для машин с одним несочлененным ведущим (управляемым) колесом (рисунок 11) точка М является вертикальной проекцией на испытательную платформу точки пересечения ведущей (управляемой) оси и плоскости симметрии ведущего колеса;
б) для машин со сдвоенным неподрессоренным роликовым колесом (рисунок 12) точка М является вертикальной проекцией на испытательную платформу точки пересечения оси роликового колеса и плоскости симметрии между двумя роликовыми колесами;
в) для машин с ведущей (управляемой) осью в балансирной балке, с центром поворота, расположенным в продольной плоскости симметрии машины (рисунок 13), точка М является вертикальной проекцией на испытательную платформу точки пересечения поперечной оси балансирной балки и продольной плоскости симметрии АВ машины;
г) для машин со сдвоенным подрессоренным роликовым колесом и одним неподрессоренным ведущим (управляемым) колесом (рисунок 14) точка М является вертикальной проекцией на испытательную платформу точки пересечения оси ведущего колеса и плоскости симметрии ведущего колеса, при этом ось ведущего колеса перпендикулярна оси наклона платформы;
д) для машин со сдвоенными поворотными ведущими (управляемыми) колесами (рисунок 15) точка М является вертикальной проекцией на испытательную платформу точки пересечения оси ведущих колес и плоскости симметрии ведущего колеса, ближайшего к оси наклона, при этом ось ведущих колес перпендикулярна оси наклона платформы;
е) для машин с неповоротными неподрессоренными роликовыми колесами (рисунок 16) точка М является вертикальной проекцией на испытательную платформу точки пересечения плоскости симметрии роликового колеса и оси роликового колеса, ближайшего к продольной плоскости симметрии машины;
Примечание. На рисунке 19 показан такой же способ определения точки М, что и на рисунке 13
ж) для машин с неповоротными неподрессоренными роликовыми колесами (рисунок 20) точка М является вертикальной проекцией на испытательную платформу точки пересечения оси роликовых колес и плоскости симметрии роликового колеса, при этом ось роликовых колес параллельна оси наклона платформы.
5.3.3 Испытательный груз
Испытательный груз должен иметь массу, равную номинальной грузоподъемности Q машины, которую она может поднять на максимальную высоту подъема. Центр тяжести испытательного груза должен находиться на расстоянии D, которое измеряется по горизонтали от передней поверхности спинки вил, а по вертикали - от верхней поверхности клыка вил.
При проведении испытаний № 1, 2, 3 и 5 центр тяжести G испытательного груза (рисунок 1) должен находиться в продольной плоскости симметрии АВ машины (рисунки 7, 8, 19 и 20).
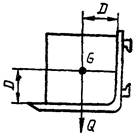
Рисунок 1
Значения параметров Q, D и максимальная высота подъема должны быть установлены в технических условиях на конкретные машины.
5.3.4 Первоначальное положение машины на испытательной платформе.
Первоначальное положение машины на испытательной платформе не должно изменяться на протяжении всего испытания.
Этого можно достичь с помощью стояночного или рабочего тормозов, которые фиксируются в рабочем положении «включено» или путем заклинивания колес относительно рамы машины.
Для сохранения первоначального положения машины на испытательной платформе допускается использовать заградительные брусья или тормозные башмаки (колодки), максимальная высота которых не должна превышать значений, указанных в таблице 1. Такие приспособления, если они используются, не должны искусственно повышать устойчивость машины.
Таблица 1
|
Внешний диаметр шины d, мм |
Наибольшая высота заградительных брусьев или тормозных башмаков (колодок), мм |
|
До 250 |
25 |
|
Св. 250 до 500 |
0,1d |
|
Св. 500 |
50 |
Коэффициент трения поверхности испытательной платформы, при необходимости, можно увеличить, используя соответствующее покрытие.
5.3.5 Положение грузоподъемника или вил
Перед проведением испытания № 1 необходимо проверить вертикальное положение грузоподъемника с помощью отвеса или другого аналогичного приспособления.
Вертикальная проекция на горизонтальную испытательную платформу точки груза (например, точки Е) должна быть одинаковой для максимальной высоты подъема соответствующей грузоподъемности и для высоты подъема приблизительно 300 мм (точка F, рисунки 2 и 4).
Отклонения от вертикального положения, вызываемые прогибами при поднятии груза должны исправляться путем изменения наклона грузоподъемника или вил в пределах, допустимых конструкцией машины (точка F1, рисунок 3).
Для машин, у которых изменения наклона грузоподъемника или вил конструкцией не предусмотрены, подобная регулировка не производится.
5.3.6 Высота подъема для испытаний, имитирующих движение
При проведении испытаний № 2, 4 и 6, имитирующих движение, верхняя поверхность клыка вилы должна быть расположена на высоте приблизительно 300 мм, измеряемой от пяты вилы до испытательной платформы.
Там, где опоры не позволяют установить вилы в положение, указанное выше, верхняя поверхность клыка должна находиться на высоте не менее 150 мм над опорами.
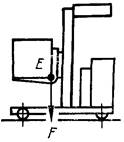
Рисунок 2
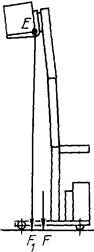
Рисунок 3
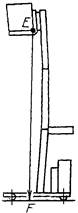
Рисунок 4
6 ТРЕБОВАНИЯ БЕЗОПАСНОСТИ
6.1 Испытания машин должны проводиться в специально отведенных местах, снабженных ограждениями и предупредительными знаками, запрещающими пребывание посторонних лиц месте испытания.
6.2 При определении устойчивости машин на испытательной платформе должны выполняться следующие требования:
- элементы крепления должны быть рассчитаны на полную массу машины с учетом запаса, предусмотренного нормами Госгортехнадзора РФ;
- страховочные канаты должны иметь бирку с указанием допускаемой нагрузки и даты проверки;
- перестановка машины должна выполняться при горизонтальном положении испытательной платформы;
- горловины заправочных емкостей и аккумуляторов должны быть закрыты штатными устройствами, не допускающими выливания масла и электролита;
- испытательный груз должен быть закреплен от возможного произвольного перемещения во всех направлениях;
- перед наклоном испытательной платформы подают звуковой сигнал, предупреждающий о начале испытаний;
- испытатели должны находиться со стороны, обеспечивающей их безопасность при аварийном падении машины.
7 ИСПЫТАНИЯ НА УСТОЙЧИВОСТЬ МАШИН С ДРУГИМИ ГРУЗОЗАХВАТНЫМИ ПРИСПОСОБЛЕНИЯМИ
7.1 Машины, оснащенные грузозахватными приспособлениями, отличными от вил, должны подвергаться испытаниям на устойчивость в соответствии с требованиями настоящего стандарта, кроме случаев, когда приспособление может вынести центр тяжести испытательного груза за пределы продольной плоскости симметрии АВ машины.
7.2 Для контроля вертикального положения грузоподъемника должна быть выбрана точка, расположенная определенным образом относительно центра тяжести испытательного груза G (рисунок 1).
Масса и расположение испытательного груза при испытаниях машины, снабженной каким-либо из приспособлений, отличных от вил, должны соответствовать массе и расположению (т.е. положению центра тяжести) груза, установленным для данного приспособления.
Установленная для данного испытания высота подъема должна измеряться от поверхности испытательной платформы до нижней стороны груза или приспособления в зависимости от того, что находится ниже.