ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
(ГОССТАНДАРТ СССР)
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ПО
НОРМАЛИЗАЦИИ В МАШИНОСТРОЕНИИ
(ВНИИМАШ)
Утверждены
Приказом ВНИИМАШ
№ 72 от 22.03.1988 г.
САПР. ТИПОВЫЕ МЕТОДЫ АВТОМАТИЗАЦИИ ПОДГОТОВКИ
УПРАВЛЯЮЩИХ ПРОГРАММ В УСЛОВИЯХ ГПС
РЕКОМЕНДАЦИИ
Р 50-54-49-88
МОСКВА 1989
Рекомендации
Методические рекомендации (Р) устанавливают общие положения, состав задач и методы автоматизированного программирования, в том числа моделирования технологических процессов обработки деталей на гибких производственных системах (ГПС) и формирования исходных данных (ИД) для системы управления (СУ) ГПС.
Распространяются на подготовку управляющих программ (УП) в рамках автоматизированных систем технологической подготовки производства (АСТПП), автоматизированного программирования (САПР), автоматизированного программирования технологических процессов (САП), автоматизированных систем управления технологическими процессами (АСУТП), ГПС.
1. Общие положения
1.1. Подготовка УП для оборудования с ЧПУ - составная часть технологической подготовки производства (ТПП) ГПС.
1.2. Основные типовые функции ТПП ГПС:
определение, классификация и группирование объектов производства, изготовление которых экономически целесообразно в условиях ГПС;
моделирование технологичности конструкций изделий;
проектирование технологических процессов (ТП) и средств технологического оснащения (СТО);
моделирование ТП обработки деталей;
определение рациональной структуры ГПС;
изготовление СТО;
автоматизированное проектирование и настройка программных средств;
оценка надежности технологических решений;
формирование доходных данных для СУ ГПС.
1.3. ТПП ГПС выполняется в соответствии с РД 50-819-86.
1.4. В настоящих рекомендациях рассматриваются типовые методы автоматизации:
программирования ТП обработки деталей на ГПС, являющегося типовой задачей проектирования ТП и СТО;
моделирования ТП обработки деталей;
формирования ИД для СУ ГПС.
1.5. Основные типовые подзадачи программирования ТП обработки деталей на ГПС;
написание рукописи переменной части ИД;
нанесение ИД на машинные носители;
помещение ИД в архив;
расчет УП на ЭВМ;
анализ результатов, обнаружение ошибок;
исправления ошибок, написание рукописи текста изменений;
нанесение текста изменений на машинные носители;
поиск ИД в архиве, внесение изменений;
повторение перечисленных подзадач программирования до полного исправления всех ошибок.
1.6. Основные типовые подзадачи моделирования ТП обработки деталей на ГПС:
моделирование геометрических параметров ТП для ГПС на основе полученных при расчете УП на ЭВМ массивов записей промежуточного языка процессор-постпроцессор;
предварительное моделирование геометрических параметров ТП для ГПС на основе УП (графический контроль УП);
окончательное моделирование геометрических параметров ТП для ГПС на основе УП (графический контроль скорректированных) УП;
предварительное первичное натурное моделирование ТП для ГПС (прогон УП без включения станка);
предварительное вторичное натурное моделирование ТП для ГПС (прогон УП с включением станка без контакта инструмента с деталью - над деталью);
натурное моделирование ТП для ГПС (обработка модели детали);
окончательное натурное моделирование ТП для ГПС (обработка первой детали на автономно работающем модуле ГПС);
завершающее натурное моделирование ТП для ГПС (обработка головной партии деталей на ГПС в отладочном режиме).
1.7. Основные типовые подзадачи при формировании ИД для СУ ГПС:
оформление технологической документации (ТД);
хранение и выдача по запросам ТД и УП;
хранение, корректировка и формирование данных по планирования проведения ТПП ГПС.
1.8. Одна из наиболее сложных и трудоемких из перечисленных типовых подзадач - расчет УМ на ЭВМ. Он осуществляется с помощью САП, входящей составной частью в АСТПП ГПС.
1.9. Решение рассматриваемых типовых задач реализуется в рамках ряда типовых подсистем: подготовки ИД для программирования, расчета УП, графического моделирования, хранения технической документации и УП, натурного моделирования ТП, формирования ИД для СУ ГПС.
2. Типовая подсистема подготовки ИД для программирования ТП
2.1. В качестве ИД для программирования ТП используют результаты работы других автоматизированных систем и информацию, подготовленную пользователем неавтоматизированным способом или сочетанием этих способов.
2.2. Большая часть ИД определяется в результате решения предшествующих типовых задач «проектирования ТП и СТО» ТПП ГПС в соответствии с РД 50-633-87.
2.3. Переменная часть ИД для программирования ТП формируется на входном языке САП.
2.4. Типовая схема формирования переменной части ИД для программирования представлена на рис. 1.
2.5. Предусматривается возможность подготовки ИД на автономно работающих устройствах подготовки данных.
2.6. Наиболее прогрессивной формой подготовки ИД является ввод ИД через видеотерминалы непосредственно во внешнюю память ЭВМ, для чего она должна иметь в своем составе несколько видеотерминалов (до 16) и соответствующее программное обеспечение (многопультовый текстовый редактор). При этом ИД заносят в библиотеки ИД геометрии, технологии, архив ИД (библиотеки сегментов, макроопределений и отлаживаемых ИД - применительно к системам со свободной структурой типа АПТЕС, АПТСМ, ТЕХТРАН, МОДАРТ и др.).
2.7. Накопление повторяющихся элементов ИД снижает трудоемкость подготовки библиотек в результате передачи и использования частей ИД из заранее подготовленных и отработанных фрагментов текста.
2.8. Формирование типовых ИД возможно путем применения специальных программ автоматической генерации текста. Примером могут служить библиотеки макроопределений коллективного пользования современных САП, используемых на ЕС и СМ ЭВМ.
2.9. Библиотеки ИД геометрии, технологии и архив ИД формируют в соответствии с РД 50-603-86.
2.10. В итоге работы подсистемы подготовки ИД для программирования ТП образуются тексты исходных программ обработки деталей на исходном языке САП.
3. Типовая подсистема расчета УП на ЭВМ
3.1. Расчет УП производится на ЭВМ под управлением САП.
3.2. Типовая схема расчета УП представлена на рис. 2.
3.3. Исходные данные поступают на носители данных либо непосредственно из подсистемы подготовки ИД, либо подсистем хранения ТД и УП, графического моделирования, натурного моделирования.
3.4. Расчет УП осуществляется в два этапа.
3.4.1. На первом этапе получают решение в общем виде, независимо от особенностей оборудования с ЧПУ и его системы управления.
3.4.2. На втором этапе результаты решения подвергают дальнейшей переработке с помощью программы последующей переработки, получившей название постпроцессора.
3.4.3. Для каждого сочетания станок-система управления применяется, как правило, свой постпроцессор.
3.4.4. Различают следующие виды постпроцессоров: перекодировщик; обслуживающий одно сочетание станок-система управления; обслуживающий два и более однотипных станка; универсальный, обслуживающий оборудование, управляемое от одной и той же модели ЧПУ; обобщенный (генератор), обслуживающий несколько станков и несколько моделей с ЧПУ; постпроцессор с технологическими блоками.
3.5. При программировании можно достоверно прогнозировать лишь ошибки, которые следует устранить. Каждая УП рассчитывается за 2 - 3 и более прогонов на ЭВМ.
3.6. Для осуществления многократной обработки ИД на ЭВМ организуют библиотеки ИД, записей промежуточного языка процессор-постпроцессор, УП.
3.7. Необходимо предусмотреть обмен данными этих библиотек с соответствующими библиотеками подсистем подготовки ИД хранения ТД и УП, графического моделирования, натурного моделирования.
3.8. В состав подсистемы расчета УП должна входить: САП, библиотека постпроцессоров, многопультовый текстовый редактор, система информационного обеспечения, модуль межмашинной связи (в случае организации автоматической связи с другими подсистемами АСТПП ГПС), пакеты прикладных программ автоматизированной подготовки УП, разрабатываемые силами пользователей САП.
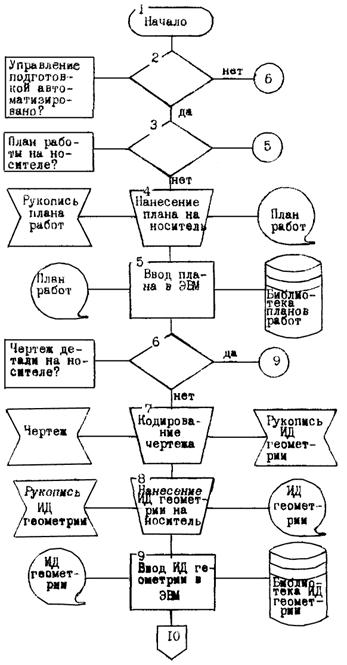
Рис. 1. Типовая схема формирования переменной части ИД для программирования

Рис. 1. (продолжение)
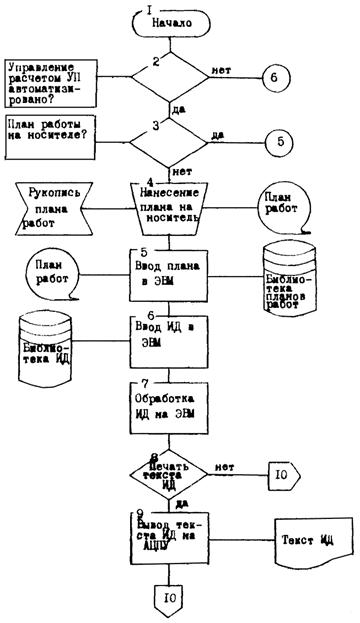
Рис. 2. Типовая схема расчета УП на ЭВМ

Рис. 2. (продолжение)
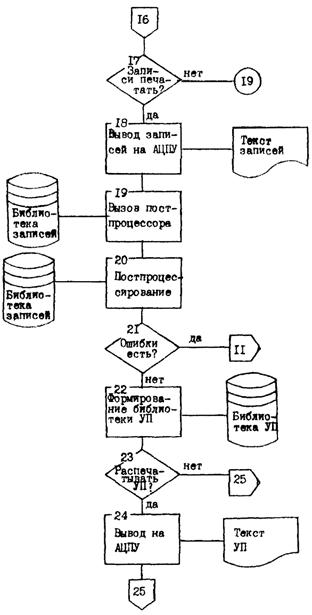
Рис. 2. (продолжение)
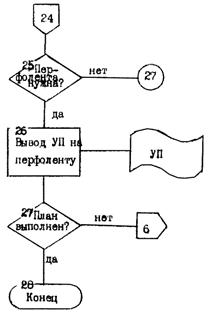
Рис. 2. (окончание)
3.9. Наиболее прогрессивной формой является расчет УП в многотерминальном режиме, для чего ЭВМ должна иметь в своем составе несколько (до 16) видеотерминалов и соответствующее программное и информационное обеспечение.
3.10. Предусматривается возможность декомпозиции общей задачи расчета УП на ЭВМ с последующим ее синтезом, что резко сокращает время цикла расчета УП на ЭВМ и его трудоемкость.
3.11. Для повышения эффективности программирования при расчете разных УП рекомендуется многократное использование одних и тех же ИД геометрического назначения на уровне канонических форм, помещенных в библиотеку геометрических сегментов.
3.12. Высший уровень автоматизации программирования достигается за счет организации автоматической связи САП с САПР технологического и конструкторского назначения.
4. Типовая подсистема графического моделирования
4.1. Графическое моделирование (графический контроль) ТП для ГПС осуществляется: с помощью графопостроителей (чертежных графических автоматов), входящих в комплект поставки ЭВМ; введением специальных контрольных устройств с программным управлением (в том числе и контрольно-измерительных машин); путем сочетания перечисленных выше устройств, работающих как в автономном режиме, так и под управлением центральной ЭВМ.
4.2. Типовая схема графического моделирования процессов производства для ГПС представлена на рис. 3.
4.3. Исходная информация для работы подсистемы готовится автоматизированно подсистемой расчета УП. Она передается непосредственно из этой системы или через подсистему хранения ТД и УП.
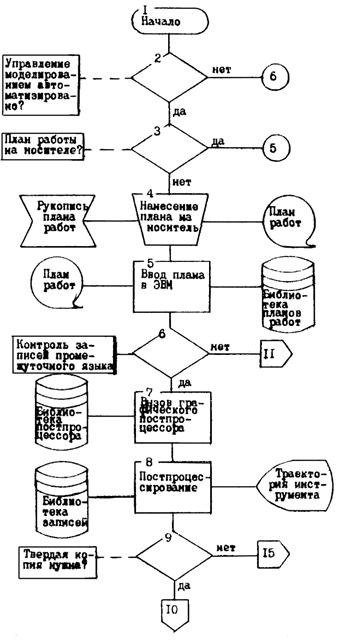
Рис. 3. Типовая схема графического моделирования процессов производства для ГПС

Рис. 3. (продолжение)
4.4. Результаты графического контроля выводятся на графический дисплей. Если нужна твердая копия, ее получают с помощью графопостроителя.
4.5. Входная информация этой подсистемы передается в подсистему хранения ТД и УП.
4.6. Так как УП после ее получения с помощью постпроцессора до момента графического контроля может быть подвергнута различным корректировкам и редактированию, то в состав пакетов прикладных программ графического контроля включают программы контроля формата и синтаксиса кадров УП.
4.7. Пакеты графического контроля УП позволяют получать графическую информацию о траектории движения инструмента, содержащуюся в кадрах УП в любой плоскости проекции, а также в изометрии и диметрии, что резко упрощает контроль и сокращает требующееся для него время.
4.8. Рекомендуется использовать для графического контроля доработанные достаточно универсальные графические пакеты прикладных программ, реализованные на стандартных средствах вычислительной техники, входящих в состав базового программного обеспечения.
4.9. В состав программного обеспечения (ПО) подсистемы должны входить: графические постпроцессоры, пакеты прикладных программ графического контроля УП, системы информационного обеспечения, модуль межмашинной связи (в случае организации автоматической межмашинной связи с другими подсистемами АС ТПП), САП типа АПТ, многопультовый редактор текстов, редактор УП.
4.10. Наиболее прогрессивной формой является графический контроль ТП для ГПС с помощью группы графических контрольных устройств, управляемых от центральной ЭВМ.
5. Типовая подсистема хранения ТД и УП
5.1. Так как процесс подготовки УП носит итеративный характер, то необходимо хранить как ИД, так и результаты работы с целью возврата, в случае необходимости, к предыдущему варианту решения. Эту функцию выполняет подсистема хранения ТД и УП.
5.2. ИД для работы подсистемы поступают из подсистем подготовки ИД, графического и натурного моделирования, расчета УП, формирования ИД для СУ ГПС.
5.3. Типовая схема работы подсистемы представлена на рис. 4.
5.4. Подсистема обеспечивает выполнение следующих видов работ:
нанесение ТД и УП на носители информации;
ввод ТД и УП в ЭВМ на носителях информации в ЭВМ;
формирование информационных массивов;
корректировка информационных массивов;
хранение информационных массивов;
поиск информационных массивов или их отдельных частей по одному или нескольким информационным параметрам;
вывод информационных массивов на носители информации (магнитную ленту, перфоленту, магнитный диск и т.п.)
5.5. Выходная информация может быть выведена по запросу на любой носитель или передана по каналам связи в указанные выше подсистемы.
5.6. В состав подсистемы должны входить: система информационного обеспечения, многопультовый текстовый редактор, модуль межмашинной связи (в случае организации автоматической межмашинной связи с другими подсистемами АСТПП).
5.7. Наиболее прогрессивной формой работы подсистемы является функционирование ее в многотерминальном режиме, для чего ЭВМ должна иметь в своем составе несколько (до 16) видеотерминалов и соответствующее программное и информационное обеспечение.
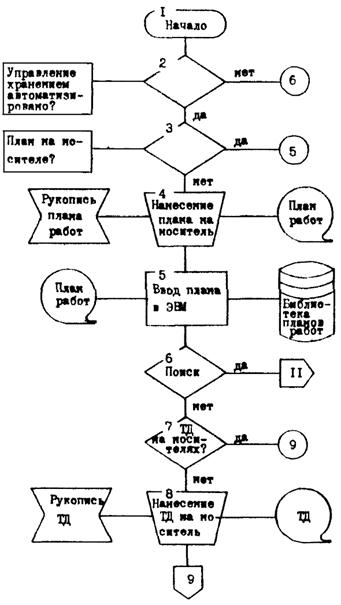
Рис. 4. Типовая схема работы подсистемы хранения ТД и УП

Рис. 4. (продолжение)
6. Типовая подсистема натурного моделирования ТП для ГПС
6.1. Натурное моделирование (технологическая отработка) в УП проводится с целью уточнения ряда технологических и геометрических параметров операций, выполняемых на ГПС.
6.2. Так как в процессе подготовки УП проводится ее корректировка, то сначала проводят покадровую отработку УП с помощью системы ЧПУ без включения станка.
6.3. Затем осуществляют контрольный прогон УП над обрабатываемой поверхностью без контакта инструмента с деталью или с небольшим заглублением в нее (0,1 - 0,2 мм).
6.4. По результатам контрольного прогона проводится, в случае необходимости, корректировка текста УП.
6.5. Для сохранения целостности исходной и выходной информации рекомендуется все исправления вносить на уровне входного языка САП с последующим повторным расчетом УП на ЭВМ.
6.6. При внесении изменений на уровне кадров УП неавтоматизированным методом или с помощью редактора управляющих программ рекомендуется одновременно с этим вносить соответствующие изменения в текст программы на входном языке САП.
6.7. После контрольного прогона осуществляется отработка УП на модели детали. В качестве моделей используются упрощенные заготовки из пенопласта, дерева, алюминия и других легкообрабатываемых материалов с целью сокращения времени отработки и предотвращения поломок режущего инструмента.
6.8. После отработки на модели детали осуществляется отработка УП на первой детали с использованием автономно работающего модуля ГПС.
6.9. В случае получения годной детали после соответствующих замеров принимается решение об обработке головной партии деталей на ГПС в отладочном и рабочем режимах.
6.10. Окончательно отработанная УП передается в подсистему хранения ТД и УП либо непосредственно в подсистему формирования ИД для СУ ГПС.
6.11. Типовая схема работы подсистемы представлена на рис. 5.
6.12. В состав ПО подсистемы должны входить: САП, библиотека постпроцессоров, система информационного обеспечения, редактор УП модуль оперативного управления и контроля технологических процессов, модуль оперативного планирования, пакеты прикладных программ технологического назначения, модуль межмашинной связи.
7. Типовая подсистема формирования ИД для СУ ГПС
7.1. ИД для СУ ГПС включает:
комплект УП, обеспечивающий выполнение заданного технологического маршрута обработки;
комплект ТД;
документы с информацией для АСУ ГПС.
7.2. В условиях ГПС структура УП должна обеспечивать:
локальное функционирование модуля в ГПС;
взаимосвязанное функционирование элементов модуля ГПС.
7.3. УП модуля ГПС содержит данные о перемещении рабочих органов и технологические команды для технологического оборудования с ЧПУ, сведения для транспортно-накопительной системы модуля ГПС, для системы загрузки-выгрузки деталей, инструментов и т.п. модуля ГПС, данные для системы операционного контроля.
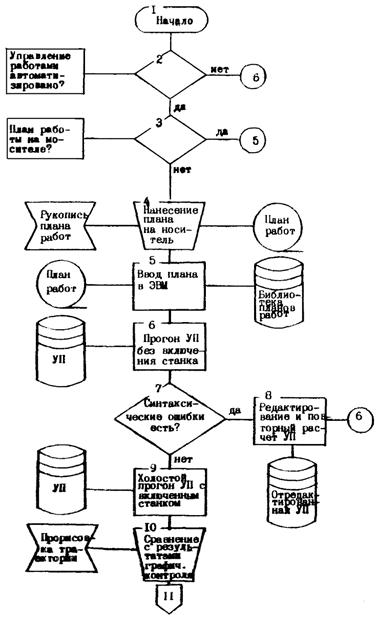
Рис. 5. Типовая схема работы подсистемы натурного моделирования процессов производства для ГПС
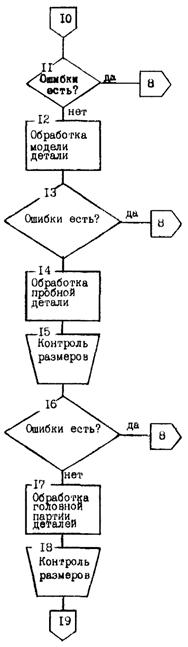
Рис. 5. (продолжение)

Рис. 5. (окончание)

Рис. 6. Типовая схема работы подсистемы формирования ИД для СУ ГПС

Рис. 6. (продолжение)
7.4. Структурно УП отражает степень децентрализации системы управления модуля ГПС, и создается либо как общая УП модуля ГПС, либо как комплект УП для отдельных составляющих элементов модуля ГПС, работающих под управлением обобщающей УП технологического оборудования с ЧПУ.
7.5. Кодирование УП осуществляется по ГОСТ 20999-83.
7.6. Комплект твердой копии ТД оформляется и соответствии с ГОСТ 3.1418-82.
7.7. Информация для подсистемы планирования и учета должна содержать следующие основные данные:
номер ТП;
параметры обрабатываемой детали (габаритные размеры, масса, материал и т.п.);
код и параметры заготовки;
номер и параметры операции (установа);
номер УП;
код и параметры оборудования с ЧПУ;
код и параметры крепежного приспособления;
коды и параметры инструментов, используемых в операции;
время: штучное, вспомогательное, подготовительно-заключительное, работы по УП, работы каждого инструмента и др.
7.8. Типовая схема работы подсистемы приведена на рис. 6.
7.9. В состав ПО подсистемы надо включать: многопультовые текстовые и графические редакторы, система информационного обеспечения, пакеты машинной графики типа ГРИФ, ГРАФОР, модуль межмашинной связи (в случае организации автоматической Межмашинной связи с другими подсистемами АСТПП).
8. Направление автоматизации подготовки УП для станков с ЧПУ в ГПС
8.1. Надежная и эффективная эксплуатация подсистем подготовки УП для ГПС возможна только при постоянном программном сопровождении и выполнении значительного объема работ по их совершенствованию.
8.2. Для совершенствования систем подготовки УП, сокращения трудоемкости подготовки УП необходима дальнейшая автоматизация этого процесса.
8.3. Основное направление работ по автоматизации подготовки УП - расширение возможностей существующих САП путем широкого использования типовых решений, реализуемых в виде модулей САП, на различных уровнях и стадиях переработки технологической информации.
8.4. В качестве типовых методов автоматизации процесса подготовки УП в САП используются:
- расширение состава операторов входных языков САП, т.е. создание формализованных языков на базе входных языков САП;
- разработка и использование библиотек макроопределений.
8.5. Основой создания формализованных языков является выявление, исследование и формализация основных составляющих ТП.
8.5.1. Проектирование и программирование технологического процесса обработки детали на станке с ЧПУ выполняется в несколько этапов: на первом этапе проектируют план операции (последовательность выполнения переходов); на втором этапе проектируют каждый переход (последовательность выполнения инструментальных ходов); на третьем этапе выполняют проектирование каждого отдельного инструментального хода (последовательность движений отдельных частей ТС); на четвертом этапе рассчитывают параметры каждого движения отдельных частей ТС. В зависимости от этапов проектирования рекомендуется использовать формализованные языки начального, первого, второго и третьего уровней автоматизации.
8.5.2. Математические модели отдельного движения и инструментального хода явились основой для создания формализованных языков начального уровня, предназначенных для описания процессов обработки на уровне движений отдельных частей ТС.
8.5.3. Форма, размеры и связь обрабатываемой поверхности с базовыми поверхностями описываются с помощью операторов входного языка. В разных системах предусмотрено от 30 до 300 различных способов определения точки, прямой (частный случай плоскости, перпендикулярной плоскости Х0Y), плоскости, окружности (частный случай прямого кругового цилиндра, ось которого перпендикулярна плоскости Х0Y), вектора, матрицы преобразования, упорядоченного множества точек, обрабатываемого контура.
8.5.4. Другие параметры, обусловливающие состояния обрабатываемой поверхности и характеристики процесса обработки описываются с помощью операторов управления постпроцессорами и операторов, фиксирующих параметры обработки.
8.5.5. Для получения управляющей перфоленты к станку с ЧПУ с помощью САП, имеющей входной язык нулевого уровня автоматизации, необходимо предварительно рассчитать набор характеристик инструментального хода. В ряде случаев следует определить и некоторые параметры, характеризующие состояние обрабатываемой поверхности, например, угол между двумя прямыми, признак (модификатор) положения геометрического элемента, начальную и конечную точки округления и другие.
8.5.6. В структуру языка первого уровня автоматизации введены операторы, позволяющие описывать, а также автоматически вычислять эти параметры. Примерный состав и назначение таких операторов приведены в Приложении 1.
8.5.7. С помощью набора операторов входного языка первого уровня можно осуществить лишь автоматизацию третьего и четвертого этапов проектирования и программирования операционных технологических процессов обработки деталей на станках с ЧПУ. Остальные этапы выполняются технологом неавтоматизированным методом.
8.5.8. Для автоматизации второго этапа проектирования и программирования предназначены операторы входного языка второго уровня. С помощью этих операторов описывается ход автоматизированного проектирования и программирования отдельных переходов обработки конструктивных элементов детали (См. Приложение 1).
8.5.9. С целью автоматизации первого этапа проектирования и программирования вводят операторы входного языка третьего уровня, которые описывают ход автоматизированного проектирования отдельных операций обработки деталей на станках с ЧПУ. Состав и назначение операторов даны в Приложении 1.
8.5.10. В процессе формирования (генерации) ИД для ЭВМ возникают технологические задачи, связанные с расчетом наборов характеристик операций, переходов, ходов и их параметров, характеризующих состояние обрабатываемых поверхностей, и построением на их основе зависимостей, которые могут быть решены точными математическими методами.
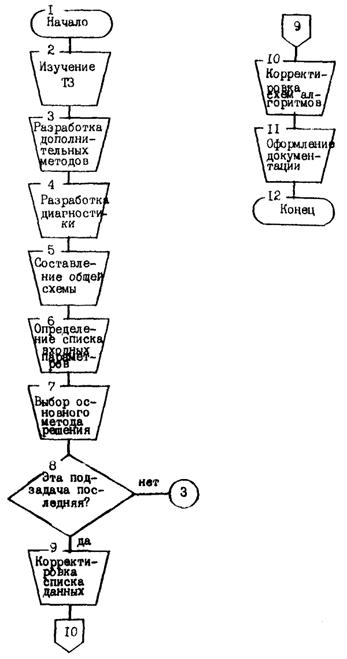
Рис. 7. Схема процесса разработки алгоритмов технологического проектирования
8.5.11. Расчет этих задач может происходить в процессе выполнения (обработки) ЭВМ операторов первого, второго или третьего уровня входного языка.
Пример реализации первого типового метода автоматизации подготовки УП в рамках системы ТЕХТРАН-Т приведен в Приложении 9, в рамках системы СПС-ТАУ в Приложении 10.
8.6. Основой создания библиотек макроопределений (второго типового метода автоматизации подготовки УП) является разработка алгоритмов проектирования и программирования элементов технологии.
8.6.1. Последовательность выполнения этапов разработки алгоритмов проектирования и программирования элементов технологии можно представить в виде схемы, изображенной на рис. 7.
8.6.2. Вначале (блок 2) изучают документацию по техническому заданию (ТЗ) на системы ПО (СПО).
При этом большое внимание уделяют ознакомлению с математическим методом решения технологической задачи. Тщательно изучают и уточняют область допустимых значений входных параметров.
8.6.3. Затем (блок 3) определяют область допустимых значений переменных при реализации основного метода и разрабатывают (выбирают) дополнительные математические методы решения задачи (подзадачи) для значений переменных, выходящих за допустимые основным методом пределы, но принадлежащих к области допустимых значений входных параметров.
8.6.4. Далее (блок 4) выявляют переменные, выход которых за область допустимых значений может привести к аварийной ситуации на ЭВМ или станке с ЧПУ. Для каждой такой переменной разрабатывают алгоритм диагностики и автоматической корректировки.
8.6.5. На следующем этапе (блок 5) осуществляют декомпозицию (разделение) технологической задачи на ряд самостоятельных подзадач с последующим их объединением (синтезом) в общую схему алгоритма.
8.6.6. Затем (блок 6) для отдельной текущей подзадачи определяется список входных и выходных параметров и области их допустимых значений.
8.6.7. После этого (блок 7) разрабатывают (выбирают) основной метод решения подзадачи.
8.6.8. Этапы с 3 по 7 повторяют для каждой подзадачи.
8.6.9. После разработки алгоритмов решения всех отдельных подзадач производят их анализ с целью выявления общих частей и соответствующей корректировки общей схемы алгоритма.
При этом, как правило, выявляют ряд вспомогательных переменных, которые можно определить однажды и затем использовать многократно при решении нескольких подзадач. Поэтому возникает необходимость в корректировке списков входных и выходных параметров отдельных подзадач (блок 9) и общей схемы алгоритма (блок 10).
8.6.10. В конце (блок 11) оформляется техническая документация на разработанный алгоритм. Примеры разработки алгоритмов приведены в Приложении 2.
8.6.11. До сих пор речь шла о методах алгоритмизации частных технологических задач, которые могут быть решены точными математическими методами. Существует класс задач технологического проектирования, которые не могут быть решены однозначно математическими методами и для решения которых используем эвристические методы алгоритмизации, основанные на тщательном изучении процесса проектирования переходов и операций в условиях отдельного предприятия. Необходимо отметить, что работам по созданию модулей второго уровня автоматизации предшествуют работы по унификации, типизации и стандартизации деталей, их конструктивных элементов их и обработки (операций и переходов).
8.6.12. Основной целью проведения этих работ является создание информационной базы в виде классификаторов типовых, унифицированных и стандартных конструктивных элементов и ТП их обработки.
8.6.13. Проектирование любого перехода сводится к расчету его параметров и формированию структуры. Поэтому при разработке алгоритмов проектирования типовых переходов используют алгоритмы расчета геометрических и технологических параметров, оформленные в виде программных модулей. Алгоритмизация зачастую сводится к конструированию модуля более высокого уровня из набора модулей низших уровней.
Примеры разработки таких алгоритмов даны в Приложении 4.
8.6.14. Особенностью составления подобных алгоритмов является вынесение за рамки программных циклов расчетов, связанных с определением геометрических и технологических параметров.
8.6.15. При программировании операций обработки деталей на оборудовании с ЧПУ с помощью современных систем макроопределения обычно рассматриваются как средство организации программных циклов внутри ИД. Но макроопределение обработки какого-либо типового элемента детали может быть оформлено на программном носителе в виде отдельного информационного массива, который затем включают в любые тексты ИД.
8.7.1. При разработке алгоритмов проектирования комплекса переходов применяют методы конструирования модуля из набора модулей нижних уровней. Центральным ядром этих алгоритмов служат алгоритмы проектирования типовых переходов. Конструктивные элементы могут быть расположены в виде упорядоченного множества.
8.7.2. В большинстве систем имеются две библиотеки макроопределений: индивидуального (БИНП) и коллективного пользования (БКП).
8.7.3. БИНП является одним из внутренних файлов САП. Макроопределение помещается в нее в оттранслированном виде (в кодах ЭВМ). Имеются ограничения на число макроопределений, помещаемых в БИНП. Так как внутренний файл имеет строго фиксированную длину, то максимальное число макроопределений, помещаемых в БИНП, зависит как от количества, так и от типа операторов, составляющих тело макроопределений. Второй недостаток БИНП в том, что другой пользователь не имеет никаких сведений о содержимом БИНП. Поэтому, чтобы расширить возможности САП, в ее состав (точнее, в состав препроцессора системы) рекомендуется включать библиотеки макроопределений коллективного пользования.
8.7.4. Во избежании ошибок, связанных с одинаковой идентификацией макроопределений, помещаемых в тексте ИП, БИНП и БКП, рекомендуется при записи в БКП добавлять к идентификатору макроопределения букву К (библиотека коллективного пользования).
8.7.5. Возможность накапливать в БИНП БКП большое число макроопределений позволяет перейти от частичной автоматизации технологического проектирования к комплексной. На базе САП силами пользователей c учетом своих специфических условий производства могут быть созданы как отдельные модули, так и интегральные программные комплексы, решающие вопросы автоматизации не только программирования, но и технологического проектирования (САПР ТП). Возможно включение в состав таких комплексов препроцессоров генерирующих тексты ИД на входном языке АПТ СМ (например, тексты ИД обработки средств технологического оснащения - кулачков), постпроцессоров с блоками формирования и вывода технологической документации, в том числе и графических постпроцессоров, осуществляющих проектирование средств технологического оснащения (например, кулачков), постпроцессоров, формирующих конструкторскую и технологическую (в том числе и графическую) документацию на технологическое оснащение, широкое использование средств диалогового взаимодействия в сочетании с созданием библиотечных технологических макроопределений.
8.7.6. Такое решение требует не только количественного, чисто механического накапливания макро в соответствующих библиотеках, но и принципиально иного подхода к их разработке и применению. Требования к разработке и применению макро включаются в ТЗ на проектирование и изготовление макроопределений. Процесс разработки ТЗ, его состав и особенности изложены в Приложении 5.
8.7.7. Одно из главных требований к таким макро, представляющим по сути технологические модули новой системы, создаваемой пользователем, состоит во включении их в диагностические подпрограммы, контролирующие значения величин входных и выходных параметров, а также текущие значения параметров технологического процесса, используемые или определяемые в ходе выполнения макро. Диагностические программы должны (по специальному запросу или независимо от него) выдавать результаты расчетов отдельных характерных параметров, входящих в промежуточные данные в неявном виде, как, например, шаг строки при выборке массива материала, на первом или последнем обходе обрабатываемого контура; число строк; шифр инструмента, оснастки и других величин, определяемых автоматически в конкретном кадре. Кроме них технологу-программисту целесообразно указать, какие из входных данных скорректированы автоматически данным макро, ввод каких данных приводит к отрицательному результату, и дать рекомендации по их корректировке.
8.7.8. Есть несколько способов сообщить программисту об этих данных. Текстовую информацию, поясняющую результаты работы макро, либо содержащую рекомендации по корректировке входных данных, можно вывести оператором ППЕЧ. В этом случае она будет передана во все фазы работы процессора и войдет в промежуточные данные, передаваемые в постпроцессор. Прямого способа вывода числовой информации, являющейся значением какой-либо переменной или отдельным ее параметром, не предусмотрено. Поэтому рекомендуется воспользоваться для ее вывода оператором РЕЖИМ с двумя и более параметрами. При этом первый параметр должен быть равен 1000, что будет являться признаком вывода числовой информации. Последующие параметры могут быть идентификаторами скалярных переменных, вместо которых процессор автоматически подставит их значения. Если нужно вывести каноническую форму геометрического элемента, то можно воспользоваться следующим приемом - определить с помощью стандартной функции каждый из параметров канонической формы:
Т1 = Т/0,0
Т2 = Т/5,5
ПР1 = ПР/Т1, Т2
Г2 = ПГ2 (ПР1)
Г3 = ПГ2 (ПР1)
Г4 = ПГ3 (ПР1)
РЕЖИМ/100, Г2, Г3, Г4.
8.7.9. Любую числовую информацию, выводимую таким образом, рекомендуется предварять соответствующим текстовым сообщением. Оно должно начинаться с идентификатора макроопределения, за которым следует слово, определяющее тип сообщения, а затем уже текст сообщения.
8.7.10. Иногда значение какой-либо переменной (скалярной или геометрической), определенное в макроопределении, необходимо использовать в других частях программы. Достигается это применением с индексом. Рекомендуется использовать при этом следующие идентификаторы:
Р - для любых скалярных переменных;
ТК - для точек;
ОК - для окружностей;
П - для прямых;
М - для матриц.
8.7.11. Естественно, для того, чтобы можно было пользоваться библиотечными макроопределениями, в тело макро должны быть включены комментарии, поясняющие назначение макро, а также каждого аргумента и область его допустимых значений, дано пояснение реализуемых макро технологических приемов, правил или алгоритмов. Иными словами, на каждое библиотечное макроопределение (технологический модуль) и на всю библиотеку в целом должна быть создана соответствующая техническая документация.
8.7.12. Так как наличие качественной технической документации на специальное программное обеспечение (СПО), каким является библиотека макро, благоприятствует его широкому внедрению, и, следовательно, способствует за счет обмена и использования передового технологического опыта, заключенного в каждом макро, обеспечению качества выпускаемой продукции и повышению уровня автоматизации технологического проектирования, то этому вопросу должно быть уделено большое внимание.
8.7.13. Прежде, чем приступить к программированию расчета геометрических параметров, необходимо тщательно изучить ТЗ на проектирование и изготовление программного модуля и алгоритм его работы.
8.7.14. Алгоритмы модулей данной группы являются наиболее универсальными и употребимыми среди всех модулей САПР ЧПУ. Поэтому при программировании их так важно обращать внимание на форму расположения текста программы. Должно быть четко выделено в тексте начало и конец модуля, путем смещения на 6 позиции вправо операторов MACRO и TERMAC. Рекомендуется конец модуля помечать меткой 10. Для того, чтобы результаты работы модуля данной группы можно было использовать в других частях ИД, значение найденного параметра присваивают переменной с индексом. Поскольку тип переменной с индексом находят при первом определении ее в тексте ИД, то для повышения надежности работы модулей рекомендуется в начале текста ИД до описания тела макроопределения присваивать переменной с индексом какое-либо формальное значение, которое в дальнейшем может быть переопределено. Так как модули данной группы могут вызываться в тексте ИД многократно, то для сохранения нужных результатов их работы в состав списка аргументов при описании заголовка макроопределения вводится аргумент с нормальным значением типа: 1 = 1. Иногда для справки необходимо вывести технологу-программисту значение выходного параметра или промежуточные результаты работы модуля. Рекомендуется для этого в заголовок макроопределения ввести аргумент с нормальным значением W = 1, а в тело макро ввести условный оператор.
Например:
: : :
ЕСЛИ (W - 2) 1, 2, 2
2) A = 1
ППЕЧ/СМОТРИ ЗНАЧЕНИЕ ВТОРОГО ПАРАМЕТРА
ППЕЧ/ОПЕРАТОРА РЕЖИМ
РЕЖИМ/1000, А1
1) K3 = K1 + 1
: : :
8.7.15. При такой организации макро технолог-программист, в случае необходимости может получить для анализа значения промежуточных расчетов модуля в явном виде, присвоив в макро команде аргументу W значение, большее или равное двум.
8.7.16. Аналогичным приемом рекомендуется воспользоваться и для вывода отдельных комментариев, например, описывающих назначение входных параметров. Это особенно важно при работе с модулями, помещенными в БИНП.
Например:
: : :
ЕСЛИ (W - 3) 1, 2, 2
2) А = 1
ППЕЧ/RENT - ОПРЕДЕЛЕНИЕ ЦЕЛОГО G(I)
ППЕЧ/НЕ ПРЕВОСХОДЯЩЕГО ЗНАЧЕНИЯ F1
ППЕЧ/1 = 1 - ЗНАЧЕНИЕ ИНДЕКСА ИСКОМОЙ ПЕРЕМЕННОЙ
1) K1 = 0.
8.7.17. При этом если в макрокоманде не будет указан параметр W, то комментарии и результат работы модуля не будут выведены на АЦПУ, так как при выполнении макро будет использовано нормальное значение W = 1. Если в операторе CALL будет указано W = 2, то выведутся результаты счета (значение переменной F(I)). Если указать W = 9, то на АЦПУ выводятся как результаты работы модуля, так и комментарии о его назначении.
8.7.18. При программировании алгоритмов данной группы необходимо помнить, что при любых значениях входных параметров должен быть получен результат, не приводящий к аварийной ситуации на ЭВМ и не выходящий за область допустимых значений выходного параметра. Даже если значения входных параметров заданы таким образом, что получается бесчисленное множество решений (неопределенность), то и в этом случае макро должно сформировать вполне определенный результат. Например, при расчете углового положения точки в местной системе координат значения заданной точки совпадают с значениями начала системы координат. Программируя подобный алгоритм вычисления угла, необходимо предусмотреть проверку входных параметров и в случае возникновения такой ситуации присвоить определенному углу нулевое значение.
8.7.19. Необходимо отметить, что предлагаемое деление параметров, характеризующих операционный технологический процесс, на геометрические и технологические является весьма условным. Результатом работы модулей данной группы станет значение того или иного технологического параметра, поэтому все основные особенности программирования, рассмотренные ранее, должны учитываться и в данном случае. Здесь же необходимо отметить дополнительные специфические моменты, присущие программированию алгоритмов данной группы.
8.7.20. В алгоритмах расчета технологических параметров предусматривается широкая проверка условий выполнения операций и вводится, если это необходимо, корректировка их отдельных значений. Результаты работы диагностических подпрограмм выводятся на печать в виде, рекомендованном ранее. Поскольку текстовая часть сообщений выводится на АЦПУ с помощью оператора с фиксированным полем ППЕЧ, то для передачи управления в нужную логическую точку макроопределения необходимо воспользоваться любым формальным оператором. Например: 17) А1 = 1.
8.7.21. Для построения функции преобразования обрабатываемой поверхности необходимо иметь сведения о начальном и конечном положении инструмента. Часто конечное положение инструмента является в то же время начальным для следующей поверхности обрабатываемого контура. Иными словами, необходимо так организовать работу модуля, чтобы, помимо расчета серии координат опорных точек траектории движения инструмента, определялось его конечное положение.
8.7.22. В большинстве алгоритмов данной группы происходит аппроксимация кривой, заданной аналитически или с помощью контрольных точек при заданном направлении обхода обрабатываемой поверхности. Чтобы с помощью того же макро можно было производить расчеты траектории при движении инструмента в противоположном направлении, поступают следующим образом. Признаком реверсивного движения является указание в списке фактических параметров оператора CALL величины аппроксимации c противоположным (отрицательным) знаком. Поэтому в начале макро анализируется величина данной переменной и назначаются поправочные коэффициенты. Для сокращения числа входных параметров информацию о координатах контрольных точек обрабатываемой поверхности передают с помощью геометрической переменной ТК с индексом. При этом в список аргументов включают только две скалярные переменные для передачи значений нижнего и верхнего пределов индекса. Поэтому при движении инструмента в противоположную сторону для изменения контролируемых макро начального и конечного граничных положений инструмента достаточно поменять местами значения указанных выше двух скалярных переменных. Если в макро для описания движения инструмента используются операторы непрерывного движения (КОНТ), в состав которых входят модификаторы направления (ПЧС, ПРЧС), то их заменяют скалярными переменными, которые включают в список аргументов макро. Не рекомендуется включать эти переменные в список аргументов с нормальными значениями. Здесь же необходимо заметить, что это положение распространяется и на все другие модификаторы положения инструмента и геометрических элементов (СЛ, СПР, ВН, НАР, ХБ, ХМ, УБ, УМ). При обработке контура могут встретиться элементы, у которых структура исходных данных одинакова, а функции преобразования обрабатываемой поверхности разные. В этом случае вначале анализируются значения исходных данных (величина координат опорных точек) и, в зависимости от их относительных величин, программируют перемещения инструмента с помощью выбранной в результате анализа функции преобразования (например: вдоль дуги окружности или вдоль дуги спирали).
8.7.23. Программирование технологических модулей может быть сведено к конструированию их из отдельных отлаженных и опробованных на практике макро. При программировании алгоритмов рассматриваемой группы данный метод применяется более широко.
8.7.24. Поскольку переход, в соответствии с [1], характеризуется функцией, структурой и набором параметров, то в теле модуля проектирования типового перехода могут быть встроены модули расчета параметров и построения функции перехода. Построение структуры перехода таким образом может быть сведено к обращениям в нужном сочетании к этим модулям.
8.7.25. Программы, реализующие алгоритмы рассматриваемой группы, являются наиболее сложными из всех программ проектирования элементов технологических процессов. Поэтому рекомендуется выделять в тексте таких модулей логически законченные части и нужным образом комментировать их. Например:
¤ ¤ ХОД РЕШЕНИЯ
¤ ¤ 1 ОПРЕДЕЛЕНИЕ ВЗАИМОСВЯЗИ ЭЛЕМЕНТОВ
: : :
¤ ¤ 2 ОПРЕДЕЛЕНИЕ БОЛЬШЕЙ СТОРОНЫ
: : :
¤ ¤ 3 РАСЧЕТ ВЕЛИЧИНЫ УГЛА
: : :
8.7.26. При программировании функции перехода часто сталкиваются с тем, что в зависимости от значений геометрических параметров движение инструмента (последовательности элементарных движений, описываемая оператором КОНТ) будет различным. Конечно, можно, используя метки или операторы условного и безусловного переходов, сформировать ветвящуюся программу. Но при этом программа усложнится и станет более громоздкой. Чтобы избежать этого, можно до описания функции перехода осуществить переупорядочение массива геометрических переменных путем изменения значений индексов таких переменных, образующих контур, а алгоритм реализации функции перехода изобразить в виде самостоятельной макро, введя в список аргументов скалярные переменные, определяющие значения модификаторов направления движения.
8.7.27. При расчете геометрических параметров обрабатываемого контура возникают определенные трудности с выбором модификаторов положения. Заменив их скалярными не переменными и включив в список аргументов макроопределения по расчету геометрических параметров, можно решить эту задачу в общем виде. Существует и более аффективный путь решения. Для этого параметры обрабатываемого конструктивного элемента определяют в местной системе его координат (МСК). Причем за оси МСК принимают, например, оси его симметрии, большую сторону, медиану, биссектрису большего угла и т.д. Согласование местной системы координат элемента с системой координат детали осуществляют с помощью оператора СКС. Такой подход в ряде случаев значительно упрощает тело макроопределения.
8.7.28. При программировании алгоритмов проектирования комплексов переходов главное - вынесение расчетов постоянных величин за рамки программных циклов. Для этого пользуются приемами, описанными ранее. С этой же целью реализуют функцию перехода в виде отдельных программных модулей.
8.7.29. Одной из важных особенностей является включение в состав модулей рассматриваемой группы подпрограммы оптимизации холостых перемещений инструмента. При расположении конструктивных элементов в виде прямоугольной матрицы анализируются расстояния между столбцами и строками и, в зависимости от этого, организуется переход либо вдоль столбцов, либо вдоль строк, таким образом, чтобы перемещений с максимальным шагом было минимальное число.
8.7.30. При расположении конструктивных элементов вдоль дуги окружности анализируется величина углового перемещения на ускоренной подаче (ПОЧС или ПРСЧ), и перемещение осуществляется в направлении отработки меньшего угла.
8.7.31. В настоящее время большинство предприятий, эксплуатирующих оборудование с ЧПУ и созданные на базе его гибкие производственные модули, участки, линии, цехи, производственные системы, используют для автоматизированной подготовки управляющих программ (УП) системы типа АПТ и разрабатывают библиотечные макроопределения, расширяющие ее технологические возможности.
8.7.32. Учитывая масштабы этих работ, одной из актуальных задач является выработка единых требований к их проведению с целью координации и объединения усилий всех исполнителей.
8.7.33. Данные требования и рекомендации охватывают все этапы разработки и эксплуатации библиотек макроопределений коллективного и индивидуального пользования, предназначенных для автоматизированного проектирования и программирования технологических процессов обработки деталей на станках с ЧПУ: разработка технических заданий, алгоритмизация проектирования элементов технологии, прикладное программирование, оформление программной документации.
8.7.34. Как показала практика, только единообразное и качественное оформление программной документации позволит объединить усилия многих предприятий и приступить на этой основе к созданию САПР-ЧПУ, используя в качестве ядра системы типа АПТ.
8.7.35. Взаимоувязанные правила разработки, оформления и обращения программ и программной документации устанавливаются комплексом государственных стандартов - Единой системой программной документации.
8.7.36. Состав программной документации на библиотечные макроопределения определяется разработчиком в техническом задании на их проектирование и изготовление. Однако, в любом случае в состав программной документации должны входить текст программы, описание программы и контрольный пример.
8.7.37. В каждом из этих документов необходимо указать полное наименование макроопределения, его символическое имя (идентификатор), наименование предприятия-разработчика. Допускается указание номера редакции, даты разработки, фамилии авторов.
8.7.38. Библиотека макро должна сопровождаться спецификацией. Пример такой спецификации представлен в Приложении 6.
В графе «Примечание» необходимо указывать идентификаторы всех использующихся в теле данного макроопределения библиотечных макрокоманд для комплексов или символические имена программ для компонентов. В последнем случае расширение М применяется для идентификации текста макро, подготовленного для записи в библиотеку (из текста удалены все комментарии). Расширение АРР применяется для идентификации примера применения макроопределения вне библиотеки (в текст макроопределения включены все необходимые комментарии).
Расширение Т используют для идентификации текста вызова макроопределения из библиотеки.
8.7.39. Помимо спецификации рекомендуется оформлять на макро определения объединенный документ, включающий описание программы, руководство программиста, описание применения, руководство системного программиста и тексты программы.
8.7.40. В настоящее время в эксплуатации у пользователей систем типа АПТ находится свыше 5000 библиотечных макроопределений, которые различаются по своему назначению и области применения.
Условно они могут быть объединены в 5 основных групп:
- стандартные, для расчета геометрических элементов, арифметических, алгебраических и тригонометрических функций, не включен них в САП;
- универсальные, предназначенные для расширения задач технологического проектирования или программирования, встречающихся практически в каждых ИД;
- типовые, предназначенные для решения задач по проектированию переходов обработки типовых (стандартных или унифицированных) элементов деталей;
- частного применения, предназначенные для решения отдельных задач технологического проектирования или программирования;
- разового применения, предназначенные для организации программных циклов в отдельных ИД.
8.7.41. В состав библиотеки макроопределений рекомендуется включать преимущественно макроопределения первых трех типов.
|
Библиотечные |
Небиблиотечные |
|||||
|
стандартные |
универсальные |
типовые |
типовые |
частные |
разовые |
|
|
Введение |
|
|
|
|
|
|
|
1. Общие сведения и функциональное назначение |
+ |
- |
- |
- |
- |
- |
|
2. Описание логической структуры |
+ |
+ |
+ |
+ |
+ |
- |
|
3. Используемые технические средства |
+ |
+ |
- |
- |
- |
- |
|
4. Вызов и загрузка |
+ |
+ |
- |
- |
- |
- |
|
5. Входные данные |
+ |
+ |
+ |
+ |
+ |
+ |
|
6. Выходные данные |
+ |
+ |
+ |
+ |
+ |
+ |
|
Литература |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Входные данные |
|
|
|
|
|
|
|
Макроопределения |
+ |
+ |
+ |
- |
- |
- |
|
|
|
|
|
|
|
|
|
Текст макроопределения на входном языке АПТ СМ |
+ |
+ |
+ |
- |
- |
- |
|
|
|
|
|
|
|
|
|
Пример применения макроопределения |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
|
|
|
|
|
|
|
Пример вызова макроопределения из библиотеки |
+ |
+ |
+ |
- |
- |
- |
8.7.42. В зависимости от принадлежности макроопределения к тому или иному типу могут меняться как состав разделов, так и требования по оформлению программной документации. Рекомендуемый состав разделов по каждому типу макроопределений приведен в Приложении 6.
8.7.43. Необходимо отметить, что предлагаемый состав разделов является лишь внешней формой разрабатываемого документа. Предполагают, что разработчик может самостоятельно вносить в документы все необходимые заголовки, указанные в табл. 1; исключать заголовки, которые не будут использоваться (сохраняя структуру информации); добавлять новые заголовки, если это необходимо; подготовить документ в соответствии с данными рекомендациями, ориентируясь на пример, приведенный ниже. Данный подход к составлению программной документации широко используется в отечественной и зарубежной практике. Он повышает ответственность разработчика за качество создаваемой документации. Применение настоящих рекомендаций должно обеспечить составление более содержательных документов, построенных так, чтобы ими легко было пользоваться. Более подробно содержание каждого из предлагаемых разделов раскрыто на примере макроопределения ККАРМ (Приложение 1).
ПРИЛОЖЕНИЯ
1. Примерный состав и назначение операторов формализованного языка на базе входных языков САП
1. Для вычисления угла между двумя прямыми предназначен оператор вида 1 (рис. 8).
Вычисленная с помощью данного оператора величина угла всегда будет положительна и меньше 180°. Отсчет угла ведется от прямой, в математически положительном направлении (против движения часовой стрелки).
2. Для вычисления угла между точками предназначен оператор вида 2 (там же). С помощью данного оператора вычисляется угловое положение точки в местной системе координат с центром в точке, помещенной в операторе на втором месте. Отсчет величины угла ведется в математически положительном направлении от положительного направления оси 0Х, проходящей через вторую и третью точки, а, в случае отсутствия третьей точки - параллельно оси 0Х системы координат детали.
3. Для вычисления знака арифметического выражения Е во входной язык включено описание стандартной функции SIGN(E). Общий вид оператора, использующего данную процедуру, представлен на рис. 8 позиция 3. Результатом вычисления с помощью этой функции будет скалярная величина; равная +1, если Е > 0; либо 0, если Е = 0; либо -1, если Е < 0.
4. Для вычисления натурального логарифма значения Е предназначена стандартная функция LN(E). Оператор, использующий данную функцию, имеет вид 4.
5. Для расчета показательной функции значения F(еЕ) предназначен оператор вида 5.

Рис. 8. Оператор первого уровня автоматизации
6. Для определения наибольшего условного числа, не превосходящего значения Е, предназначен оператор вида 6.
7. Для нахождения значения расстояния от точки (геометрический элемент 02) предназначен оператор вида 7.
8. Для вычисления значения расстояния между двумя точками (геометрические элементы G1 и G2) предназначен оператор вида 8.
9. Для расчета точки на прямой значением одной из ее координат предназначен оператор вида 9.
10. Для определения точки на окружности значением одной из ее координат предназначен оператор вида 10.
11. Для определения точки как центр окружности введен оператор вида 11.
12. Для определения прямой направляющими косинусами предназначен оператор вида 12.
13. Для определения прямой, проходящей через точку под заданным углом к другой прямой, необходим оператор вида 13.
14. Для определения прямой, касательной к окружности и проходящей под заданным углом к другой прямой, предназначен оператор вида 14.
15. Для определения окружности, касательной к трем прямым, предназначен оператор вида 15.
16. Для получения окружности заданного радиуса, проходящей через две точки, предназначен оператор вида 16.
17. Для определения окружности заданного радиуса, проходящей через точку и касательной к другой окружности, предназначен оператор вида 1 (рис. 9).
18. Для описания величины припуска на последующую обработку предназначен оператор вида 2 (там же). Здесь: d - припуск, оставляемый на обрабатываемой поверхности боковой частью режущего инструмента; t - припуск по торцу инструмента.
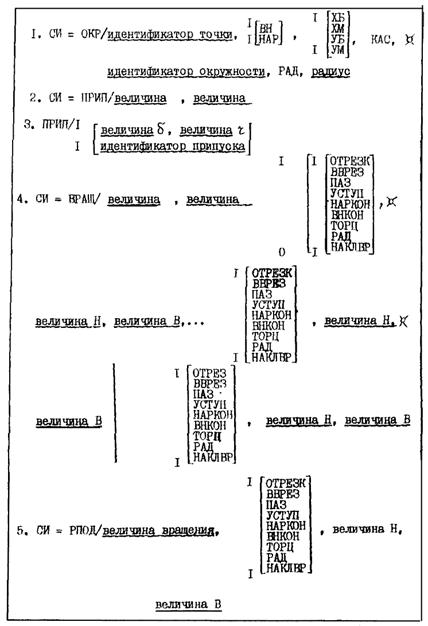
Рис. 9. Операторы первого уровня автоматизации
19. Оператор, вводящий в действие описанный ранее припуск, имеет вид 3.
20. Для автоматического расчета чисел оборотов вращения шпинделя предлагается оператор вида 4.
Модификаторы обозначают тип инструментального хода (см. рис. 10): ОТРЕЗКСТРИЖ - отрезка, ВВРЕЗ - вертикальное врезание, ПАЗ - фрезерование паза, УСТУП - фрезерование уступа, НАРКОН - фрезерование наружного контура, ВНКОН - фрезерование внутреннего контура, ТОРЦ - фрезерование торцем фрезы, РАД - фрезерование внутренних радиусов, НАКЛВР - наклонное врезание.
H - глубина резания при выполнении отдельного хода инструмента, В - ширина фрезерования, L - величина вылета инструмента от торца шпинделя, d - диаметральный размер инструмента.
По этому оператору рассчитывают число оборотов вращения шпинделя, с которым производится обработка всех указанных в правой части инструментальных ходов.
21. Для автоматического расчета величины подачи при выполнении одного инструментального хода предлагается оператор вида 5 (рис. 9).
22. При проектировании переходов чистовой обработки для ликвидации подрезов обрабатываемого контура в местах изменения направления движения инструмента вводят дополнительные инструментальные ходы по радиусам окружности - так называемые округления. Величины этих скруглений предлагается описывать с помощью оператора вида 1 (рис. 10).
23. Оператор, отменявший действие оператора округления, имеет вид 2 (там же).
24. Для описания исполнительных параметров режущего комплектного инструмента, а в дальнейшем и поиска по этим параметрам реального инструмента в библиотеке инструментов, может быть применен оператор вида 4 (там же).

Рис. 10. Операторы первого и второго уровней автоматизации
25. Модификаторы в скобках этого оператора обозначают тип инструмента: ФРЕЗА - концевая фреза, СВЕРЛО - спиральное сверло, ЗЕНКЕР - спиральный зенкер, РАЗВ - развертка, ЦЕНТР - центровочное сверло, ТОРЦ - торцевый зенкер, МЕТЧ - метчик.
26. Ввод в действие описанного таким образом инструмента осуществляется с помощью оператора вида 4 (рис. 10).
27. Как и в языке начального уровня, состояние обрабатываемых поверхностей описывается набором геометрических переменных. Однако, в языке второго уровня есть средства описания связи отдельных обрабатываемых поверхностей друг другом. Одним из возможных вариантов такого описания является оператор вида 5 (там же).
28. Элементы, составляющие контур конструктивного элемента, описываются в правой части оператора в порядке обхода контура против движения часовой стрелки. Если контур разомкнутый, то описание его должно начинаться и заканчиваться описанием точки. Каждый элемент контура должен иметь хотя бы одну общую точку с последующим элементом. Если имеется несколько (две) точек пересечения, то модификатор ПРС2 указывает, что в обрабатываемый контур включается часть рассматриваемого элемента до 2-ой (по направлению обхода) точки пересечения с последующим элементом. Модификаторы направления ВЛЕВ, ВПРАВ, ВПЕР, НАЗАД, ПОЧС, ПРЧС применяются в случае неоднозначного решения при указании обхода контура.
29. Модификаторы СЛ, СПР указывают, с какой стороны от описываемого контура будет находиться режущий инструмент, если предположить, что движение его совпадает с последовательностью описания геометрических элементов (против движения часовой стрелки).
30. Как уже отмечалось ранее, вид преобразования обрабатываемых поверхностей из состояния Ci-1 в Ci определяется типом перехода. Различают переходы предварительный (черновой) и окончательный (чистовой) обработки.
31. Переходы предварительной обработки можно разделить на две большие группы: переходы выборки массива из замкнутого контура (колодцев) и разомкнутого контура (карманов). Для описания переходов предварительной обработки предлагается оператор вида 6 (рис. 10).
Модификаторы в скобках имеют следующее значение: СТРОКА - производится обработка строками, параллельными большему из отрезков описанного контура; ЗАЧИСТ - в конце обработки производится зачистной обход обрабатываемого контура; БЕЗ - зачистного обхода не производится; СПИР - выполняется обработка по спиралевидной траектории; ПОЧС, ПРУС - направление обхода контура режущим инструментом; ОТРЕЗОК, ВРЕЗ, ПАЗ, УСТУП, НАРКОН, ВНКОН, ТОРЦ, РАД, НАКЛВР - указывают тип прохода инструмента, к которому относится следующая за ним подача, заданная технологом-программистом.
32. Оператор, вводящий в действие описанный ранее переход, имеет вид 1 (рис. 11).
33. Для описания переходов окончательной обработки предлагается оператор вида 2 (там же).
Модификатор ПРЯМ указывает, что обработка производится в прямом порядке описания элементов в операторе КОНТУР. Модификатор ОБРАТН означает, что обход инструментом контура происходит в направлении, обратном описанию элементов контура.
Оператор, вводящий в действие данный переход, имеет вид 1 (рис. 11).
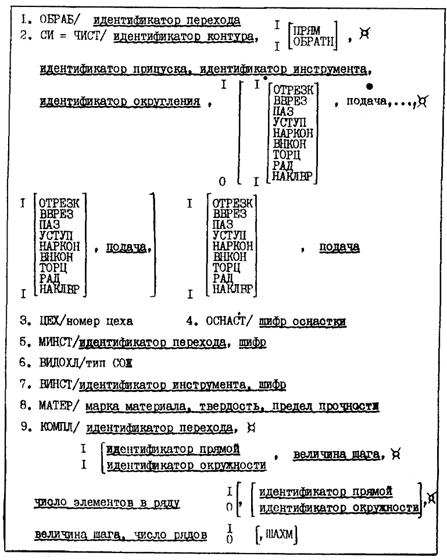
Рис. 11. Операторы второго и третьего уровней автоматизации
34. Для формирования операционной карты и идентификации выходной машинной документации необходимо ввести в систему сведения о номере цеха, шифре оснастки, измерительном инструменте. Операторы, описывающие эти величины, будут иметь вид: 3, 4, 5, 6 (рис. 11).
Последний из операторов позволяет указать шифр измерительного инструмента, который необходим для выполнения измерений поверхностей, обрабатываемых в указанном переходе.
35. Для описания сведений о вспомогательном инструменте предназначен оператор вида 7 (там же).
36. Для описания марки материала обрабатываемой детали и его физико-механических свойств, а в дальнейшем и поиска по этим данным остальных характеристик материала в библиотеке материалов предназначен оператор вида 8.
Поскольку операция состоит из серии выполняемых последовательно переходов, то общая (интегральная) функция операции Фо будет состоять из последовательности функций переходов Фn, которые могут быть описаны с помощью операторов ввода ЧEPH N и ЧИСТ N, помещенных в ИД в нужной последовательности.
37. Для описания структурных формул операций 2, 4 и 6 классов соединения лучше пользоваться оператором, описывающим ввод в действие комплекс переходов вида 9.
В этом операторе обозначение прямой и обозначение окружности указывают направление расположения столбцов и строк в упорядоченном множестве элементов. Модификатор ШАХМ указывает, что начальный элемент в каждом последующем ряду сдвинут на величину, равную половине шага строки, относительно предыдущего ряда. С помощью данных операторов можно описать структуру операций всех классов соединения.
2. Примеры разработки алгоритмов отдельных технологических задач
Инструментальный ход определяется набором характеристик Ах, функцией преобразования Фх и структурой Sx.
При проектировании и программировании предварительных (черновых) ходов инструмента в случае обработки поверхности торцем фрезы для обеспечения максимальной производительности (особенно при обработке легких сплавов) назначают максимально допустимую глубину резания (шаг строки), исходя из условия минимального перекрытия строк по формуле
Hстр = 0,8(Dфр - 2rфр),
где D - диаметр фрезы;
rфр - радиус округления торца фрезы.
Однако при таком расчете Нстр. в углах могут оставаться необработанные зоны. Рис. 12 поясняет это положение.
Поэтому величину припуска в углах Е рассчитывают по формуле:

В случае Е > 0 вводится дополнительный ход инструмента в направлении вершины угла на величину Е.
Общий припуск
D на обработку конструктивного элемента
снимается при выполнении ходов инструмента по K
строкам. Так как D не кратно Нстр.,
определяемому расчетным путем или задаваемому технологом, то величину припуска,
снимаемого на первой строке, определяют по формуле: ![]() .
.
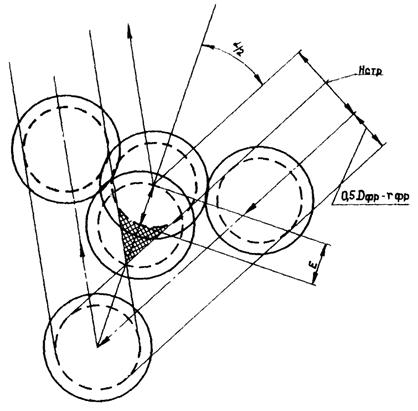
Рис. 12. Введение дополнительного хода Е инструмента для обработки неперекрываемых зон в углах колодца
Поскольку расчет припуска Hстр при проектировании инструментального хода может быть описан одним арифметическим выражением (оператором), то просто включим эти операторы в модули первого или второго уровня, не оформляя их в виде независимых программных модулей.
Анализ операционных ТП показал, что переход задается набором характеристик An, функцией Фn и структурой.
В случае предварительной обработки замкнутого контура величина припуска D, снимаемого в проектируемой операции, определяется по формуле
![]()
где С - величина радиуса наибольшей вписанной в данный контур окружности (см. п. 4.2);
d - припуск на последующую обработку.
В случае предварительной обработки разомкнутого контура строками вдоль верхней ограничивающей поверхности величина снимаемого припуска определяется выражением
![]()
Здесь Сi - расстояние от открытой до противоположной ей внутренней границы обрабатываемого контура.
При проектировании и программировании операции окончательной обработки контура величину припуска, снимаемого в углах, определим по формуле
Схема алгоритма расчета величины снимаемого припуска приведена на рис. 15.
При проектировании операций предварительной обработки число строк при обработке конструктивного элемента детали K определим как целую часть выражения
![]()
Обычно число строк и величина припуска, снимаемого на первой строке, определяется в модуле расчета начального диаметра условной фрезы.
Диаметр фрезы
для чистовой обработки контура D*фр
выбираем по номинальному размеру диаметра наименьшей вогнутой обрабатываемой
поверхности: ![]() .
.
Радиус заточки торца фрезы r*фр чистовой обработки определяем по номинальному размеру наибольшего радиуса сопряжения дна и стенок:
![]()
Длину режущей части l*фр фрезы рассчитаем по формуле
![]()
где Hi - высота стенки обрабатываемого контура, l = 5 ¸ 7 мм;
Rконт - величина рабочей части, выступающей над обрабатываемой поверхностью, необходимая для организации более стабильного процесса резания.
Диаметр фрезы для предварительной (черновой) обработки D¢фр рассчитываем при условии, что припуск на последующую обработку в углах d¢ составляет не более
![]()
где С = 0,2 ¸ 0,3.

Рис. 13. Схема алгоритма расчета числа проходов и глубины резания при токарной обработке
Рис. 14 поясняет данное положение.
Как видно из рисунка, d¢i вычисляется по формуле
d¢i = ai - bi,
где
![]()
![]()
в свою очередь

Здесь d¢ - припуск по стенке на последующую обработку;
ai - величина внутреннего угла обрабатываемого контура.
Произведя соответствующие подстановки, получаем
Схема алгоритма вычисления D¢фр по этой формуле приведена на рис. 16.
Для случая D¢фр = Di = const диаметр черновой обработки фрезы рассчитаем по формуле

где ![]()
с1 = 0,4 ¸ 0,6.
Радиус заточки торца фрезы R¢фр для черновой обработки выбираем на основе анализа величины припуска на последующую обработку по стенке di, по дну d1i и радиусов перехода между стенкой и дном. Рис. 16 поясняет это положение. Как видно из рисунка,

Рис. 14. Припуск, снимаемый в углах обрабатываемого контура при выполнении чистового перехода

Рис. 15. Схема алгоритма расчета припуска, снимаемого в углах обрабатываемого контура при выполнении чистового перехода
![]()
Отсюда
![]()
если
ri = const, di = const, d1i = const,
![]()
Схема алгоритма расчета r¢фр аналогична схеме, приведенной на рис. 15.
Длину режущей части l¢фр фрезы определяем по формуле
![]()
Рассчитав исполнительные размеры режущего инструмента по ГОСТам или ОСТам, подбираем нужный инструмент. Вначале поиск ведем по диаметру фрезы, выбирая ближайшую группу фрез с диаметром меньше расчетного. Затем продолжаем поиск по длине рабочей части. Схема одного из вариантов алгоритма, реализующего подобный поиск, приведена на рис. 17.
Одним из важных технологических параметров, определяющим скорость съема металла, является глубина резания. Обрабатываемая область заготовки разделяется черновым контуром на две части: черновую и чистовую области. Чистовая область обеспечивает условия выполнения требований к чистоте и точности поверхностей, заданных чертежом детали. Чистовой проход должен быть предусмотрен, если среднее арифметическое отклонение профиля поверхности Rа меньше 40 мкм. Съем материала при чистовом точении осуществляется за один проход с глубиной, определяемой для чистового прохода в конкретных условиях резания.
Рис. 16. Выбор радиуса заточки торца фрезы
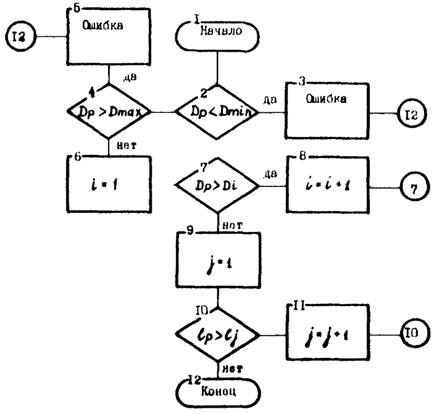
Рис. 17. Схема алгоритма выбора нужного инструмента
Черновая область в отличие от чистовой не всегда может быть обработана за один проход. Многопроходная обработка имеет место в том случае, когда наибольшая допустимая глубина резания, определяемая возможностями инструмента и условиями виброустойчивости системы, больше припуска на черновую обработку.
Число черновых проходов находят путем делания припуска на черновую обработку D на максимально допустимую глубину резания tmax. Если при делении с заданной точностью получается целое число, то число черновых проходов i = D/tmax и глубина резания на всех проходах принимает значение tmax.
В случае, когда остаток от деления превышает заданную точность, число черновых проходов увеличивается на единицу. Предварительное значение глубины резания на каждом проходе в этом случае меньше tmax и равно частному от деления чернового припуска на число проходов. Поскольку при определении глубины резания производилось округление, то произведение числа черновых проходов на глубину резания tпр будет меньше величины снимаемого припуска D. Т.е. если осуществлять каждый проход с глубиной tпр, то в конце процесса резания накопится неснятый слой материала А, равный А = D - tпр × i. Этот слой материала прибавляется к глубине резания tпр на первом проходе. Схема алгоритма расчета числа проходов и глубин резания при токарной обработке приведена на рис. 13.

Рис. 18. Классификатор типовых переходов
|
№№ деталей |
Наименование |
Материал |
Цех № |
Операция № |
|
|
|
6Д8079008 |
Плата |
Д20АТ |
16 |
20 |
|
6В8054315 |
Крышка |
САС-1 |
16 |
78 |
|
|
6В8054614 |
Крышка |
CAС-1 |
16 |
90 |
|
|
6Д8880414 |
Прокладка |
ДТА-Т |
16 |
40 |
|
|
6Д8090546 |
Кронштейн |
1X18Н9Т |
16 |
50 |
|
|
|
7Ф8210088 |
Крышка |
АМГ-6 |
7 |
40 |
|
6В8212089 |
Обойма |
2X13 |
7 |
45 |
|
|
6Д8057044 |
Панель |
стеклотекстолит |
7 |
25 |
|
|
6В8057043 |
Крышка |
САС-1 |
16 |
65 |
|
|
6С8057043 |
Панель |
стеклотекст. |
7 |
25 |
|
|
6Д8636181 |
Оправа |
В95Т1 |
16 |
45 |
|
|
6Ш8230152 |
Фланец |
Д16 |
16 |
35 |
|
|
6С8054433 |
Крышка |
Д16 |
16 |
45 |
|
|
6Д8241064 |
Кольцо |
Э-12 |
16 |
40 |
|
|
6Д8249096 |
Плата |
Д16АТ |
16 |
50 |
|
|
6Ш8230152 |
Фланец |
Д20АТ |
16 |
35, 40 |
|
|
6Д6121084 |
Плата |
Д20АТ |
16 |
40 |


Рис. 19. Пример классификационной таблицы типовых переходов
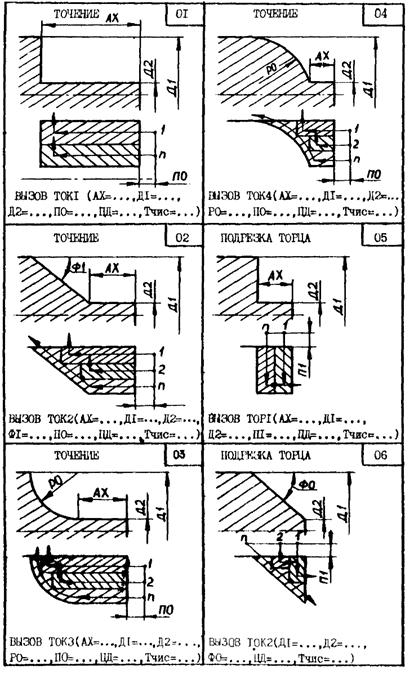
Рис. 20. Схемы токарной обработки

Рис. 20 (продолжение)
4. Примеры разработки алгоритмов проектирования элементов технологических процессов
1. Общее решение задачи технологического проектирования переходов предварительной обработки замкнутого контура (выпуклого четырехугольника) разобьем на отдельные этапы:
- расчет точки входа фрезы в обрабатываемый массив материала;
- расчет констант и параметров программного цикла;
- проверка условий выполнения операций;
- расчет величин дополнительных ходов в направлении вершин углов;
- построение траектории наклонного врезания;
- построение сетки эквидистант.
Схема алгоритма представлена на рис. 21. Рассмотрим его более подробно.
2. Алгоритм расчета точки входа фрезы в обрабатываемый массив материала приведен ранее. Здесь же, в отличие от него, сохраним значения всех вычисленных углов и окружностей, которые используем в последующих расчетах.
3. После определения величины диаметра большей из вписанных окружностей Dmax произведем проверку условий выполнения операции Dфp < Dmax. Если неравенство не выполняется, то выдадим сообщение об ошибке и прекратим вычисления.
4. На втором этапе произведем расчет констант и параметров цикла, среди которых главными являются:
- величина снимаемого припуска D;
- шаг строки Hстр.;
- число строк K;
- начальный диаметр условной фрезы Dн;
- конечный диаметр условной фрезы Dх.

Рис. 21. Схема алгоритма проектирования перехода предварительной обработки замкнутого контура
5. Алгоритмы расчета этих параметров были рассмотрены ранее. На третьем этапе проверим условии выполнения операции
Dфр + 2d < 2max; Hстр < Hстр.
Если эти условия не выполняются, то произведем корректировку величин.
6. На четвертом этапе рассчитаем величины дополнительных ходов в направлении вершины каждого угла по алгоритмам, изложенным ранее.
7. На пятом этапе произведем построение траектории врезания в припуск. При этом проанализируем величину Нстр. В случае Hcтр. > D, т.е. выполнения перехода за один обход контура, сформируем траекторию вертикального врезания. В противном случае назначим наклонное врезание за два хода инструмента длиной, равной Нстр, и глубиной, равной половине глубины колодца.
8. На шестом этапе произведем расчет траектории движения вершины инструмента при выполнении проектируемого перехода. Переход со строки на строку осуществим с подачей пазового фрезерования в направлении меньшего из 2-х углов, прилегающих к меньшей из вписанных окружностей. Обход вдоль контура произведем с подачей фрезерования уступа. Направление движения вдоль контура совпадает с направлением движения часовой стрелки. В начале каждой строки произведем проверку вырождения меньшей из ограничивающих контур прямых: Dусi < Dmin. Если условие не выполняется, то сформируем вдоль треугольного контура, в противном случае - вдоль 4-угольного. В конце каждого хода инструмента вдоль прямой проанализируем величину дополнительного хода (Е) и, если она больше С, то введем ход инструмента в направлении вершины угла с пазовой подачей. При выполнении чистового обхода вдоль контура выполнение дополнительных ходов блокируем за счет присвоения переменным Е1, E2, Е3 и Е4 отрицательной величины.
9. Схема алгоритма не претерпит существенных изменений, если прямые будут сопрягаться дугами окружностей, с диаметрами большими, чем диаметр фрезы, но меньшими Dmin.
10. Рассмотрим теперь особенности разработки алгоритмов проектирования и программирования переходов предварительной обработки разомкнутого контура (выпуклого четырехугольника).
Общее решение задачи проектирования и программирования рассматриваемого перехода разобьем на следующие этапы:
- расчетов величины снимаемого припуска;
- проверки условий выполнения операции;
- расчета числа строк;
- расчета прямых, эквидистантных боковым границам кармана;
- расчета констант и параметров программного цикла;
- расчета начальной точки обработки;
- формирования траектории движения инструмента.
11. Общая схема алгоритма приведена на рис. 22. Этапы, связанные с расчетом D, K, эквидистантных прямых, констант и параметров программного цикла, были рассмотрены ранее. Здесь же отметим, что в алгоритмы проектирования рассматриваемого перехода включены программные модули расчета указанных геометрических и технологических параметров.
Поэтому рассмотрим только два последних этапа проектирования. Точка начала обработки определяется как пересечение одной из боковых эквидистантных прямых с биссектрисой угла, расположенного со стороны максимального припуска на обработку. Построение биссектрисы угла осуществим с помощью программного модуля расчета величины угла между прямыми.
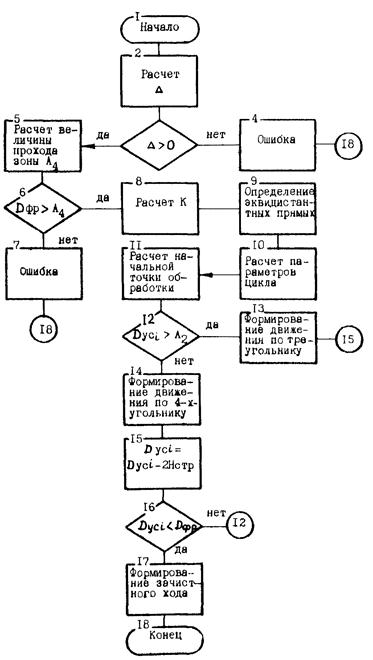
Рис. 22. Схема алгоритма проектирования перехода предварительной обработки разомкнутого контура
12. Особенностью разработки алгоритмов формирования траектории движения является, помимо анализа вырождения геометрического элемента, как в предыдущем алгоритме, организация реверса в конце каждой строки. При формировании зачистного обхода учитываем, что он выполняется при попутном фрезеровании.
13. Как было показано на примерах алгоритмов проектирования переходов предварительной обработки, в каждом из них формируется чистовой обход по контуру. Этот алгоритм проектирования чистового обхода в совокупности с рядом алгоритмов проектирования вспомогательных ходов по подводу инструмента в зону обработки может быть оформлен в виде самостоятельного программного модуля. В большинстве случаев целесообразно разрабатывать универсальные алгоритм, по которому можно проектировать переходы как предварительной, так и окончательной обработки отдельного конструктивного элемента детали или их упорядоченного множества.
5. Рекомендуемая схема процесса разработки ТЗ на проектирование и изготовление макроопределений. Состав ТЗ и содержание его разделов
1. При разработке ТЗ на проектирование и изготовление библиотечных макроопределений рекомендуется придерживаться следующей схемы работ (рис. 23).
1.1. В начале (этап 2) производят предварительное определения исходных данных и, в первом приближении, формируют задачу, которую должно решать проектируемое СПО (этап 3).
1.2. На основании сформированной таким образом задачи определяют ориентировочно предполагаемую область применения проектируемого СПО и, в зависимости от этого, определяют границы исследований, которые необходимо будет выполнить при разработке ТЗ на СПО (этап 4), и перечень ведущих фирм, разрабатывающих СПО в данной области (этап 5).
1.3. На этапе 6, в зависимости от состава ведущих фирм, выявленных ранее, определяют глубину (временной интервал) и ширину (перечень стран и состав источников периодической технической литературы) информационного потока.
1.4. Затем в соответствии с определенными ранее границами, проводят информационный поиск (этап 8), предварительно выбрав прототип проектируемого СПО (этап 7).
1.5. На 9 этапе анализируют материалы, отобранные при информационном поиске. Если анализ подтверждает правильность выбранной в качестве прототипа версии СПО для решения сформулированной ранее задачи (этап 10), то переходят к выполнению следующего этапа. В противном случае возвращаются к этапу 7 и выбирают другой прототип проектируемого СПО, удовлетворяющий сформулированной ранее задаче.
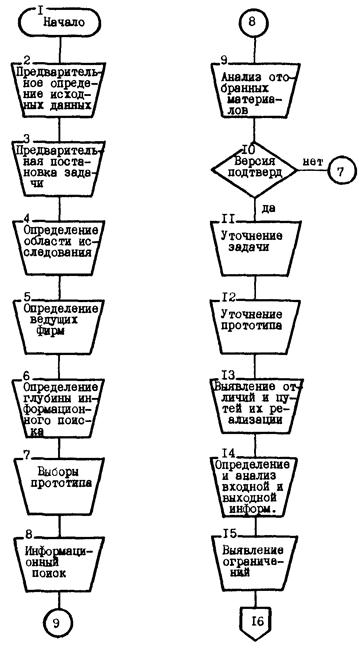
Рис. 23. Схема разработки ТЗ на проектирования и изготовление библиотечных макроопределений

Рис. 23 (продолжение)
1.6. На этапе 11 производят уточнение сформулированной ранее задачи с учетом анализа материалов, отобранных при информационном поиске и отображающих состояние вопроса.
1.7. С учетом этих уточнений вновь рассматривают прототип проектируемого СПО и производят его корректировку (этап 12).
1.8. На 13 этапе более детально формируют отличие проектируемого СПО от выбранного прототипа и намечают пути их реализации.
1.9. На этапе 14 окончательно определяют состав и объем входной и выходной информации.
1.10. На этапе 15 выявляют основные и дополнительные ограничения, накладываемые на проектируемое СПО.
1.11. В случае, если учет данных ограничений существенно меняет формулировку задачи (этап 16), повторяют выполнение этапов, начиная с третьего.
1.12. В противном случае (этап 17) производят окончательную формулировку задачи и выбирают из предполагаемых метод ее решения.
1.13. На этапе 18 выполняют расчеты экономической эффективности применения проектируемого СПО.
1.14. Если экономия приведенных затрат мала или отсутствует вовсе (этап 19), то повторяют выполнение предыдущих этапов, начиная с этапа 7.
1.15. В противном случае (этап 20) приступают к подготовке технической документации на ТЗ.
1.16. На этапе 21 проводят обсуждение ТЗ с привлечением сведений о типовых приемах преодоления технических противоречий. Основные положения этого метода изложены в [5]. Но поскольку речь идет о принципах проектирования СПО то, чтобы использовать указанный выше метод, необходимо дополнить таблицу устранения технических противоречий специальными приемами, используемыми при проектировании СПО.
1.17. Другим важным аспектом разработки ТЗ на СПО является полное и четкое описание входной и выходной информации.
1.18. Выявление и анализ информации целесообразно начинать с выходной информации, так как ее состав и форма определяются, в значительной мере, условиями сформулированной ранее задачи. При этом можно провести прямую аналогично с проектированием технологического процесса обработки детали по данным ее чертежа, выполняемым начиная с финишных операций.
1.19. Одним из заключительных этапов разработки ТЗ на СПО является подготовка технической документации. Техническая документация по ТЗ должна отражать содержание основных этапов проведенной работы, поэтому и рекомендации по подготовке этой документации служат одновременно и рекомендациями по выполнению основных этапов разработки ТЗ на СПО.
1.20. Техническое задание оформляют в соответствии с ГОСТ 19.201-78.
2. По составу решаемых задач различают ТЗ на СПО, предназначенное для расчета геометрических параметров проектируемых ходов и переходов; расчета технологических параметров структурных элементов станочной операции; проектирования ходов, переходов, комплексов переходов и операций в целом. В зависимости от принадлежности СПО к тому или иному типу могут меняться как состав разделов приложения к ТЗ, так и требования по оформлению данного приложения, в то время как состав разделов ТЗ остается неизменным.
3. Для удобства рекомендуемый состав разделов приложения по каждому типу СПО приведен в табл. 2.
3.1. Необходимо отметить, что предполагаемый состав разделов приложения является лишь внешней формой разрабатываемого документа, который предназначен для более полного и детального раскрытия содержания соответствующих разделов ТЗ. Предполагается, что разработчик может: самостоятельно вносить в документы все необходимые заголовки, указанные в табл. 1; исключать заголовки, которые не будут использоваться (сохраняя структуру изложения материала); добавлять новые заголовки, если это необходимо; подготовить ТЗ с приложением к нему в соответствии о настоящей методикой, ориентируясь на помещенный далее пример.
3.2. Данный подход к составлению ТЗ на СПО повышает ответственность разработчика за качество создаваемой документации. Применение его должно обеспечить составление более содержательных документов, построенных так, чтобы ими легко было пользоваться различным группам специалистов, участвующим в создании СПО.
4. Рекомендации и требования к содержанию разделов ТЗ определены ГОСТ 19.201-78. Необходимо отметить, что в ТЗ отражаются лишь конечные результаты этапов работ, а весь материал, обосновывающий правильность сделанных выводов, разработанных требований, формулировку и метод решения задачи, помещается в приложении к ТЗ.
4.1. В приложении к ТЗ необходимо указать, для каких групп специалистов предназначено разработанное ТЗ на СПО. Желательно также пояснить, на основании каких положений была принята данная степень детализации ТЗ. Целесообразно указать, какое внимание было уделено точности и полноте описаний отдельных разделов ТЗ и приложения. Необходимо охарактеризовать степень законченности раздела этих документов, отметить основные приемы и способы повышения наглядности излагаемого материала, примененные при составлении ТЗ. В заключении раздела желательно перечислить авторов ТЗ с указанием конкретных разделов, в разработке которых они принимали участие.
Состав разделов приложения к ТЗ в зависимости от типа СПО
|
Библиотечные модули автоматизации проектирования или расчета |
||||||
|
станочных операций |
комплексов переходов |
переходов |
ходов инструмента |
технологических параметров |
геометрических параметров |
|
|
Введение |
� |
� |
� |
|
|
|
|
Формулировка задачи |
� |
� |
� |
� |
� |
� |
|
Описание принципа работы |
� |
� |
|
|
|
|
|
Входные данные |
� |
� |
� |
� |
� |
� |
|
Выходные данные |
� |
� |
� |
� |
� |
� |
|
Описание этапов переработки информации |
� |
� |
� |
� |
� |
� |
|
Подготовка ИД для ЭВМ |
� |
� |
� |
|
|
|
|
Расчет экономической эффективности |
� |
� |
� |
|
|
|
|
Описание выходной машинной документации |
� |
� |
|
|
|
|
|
Литература |
� |
� |
� |
|
|
|
Условные обозначения:
� - наличие раздела обязательно
- наличие раздела необязательно
4.2. В разделе «Формулировка задачи» дается общая постановка задачи, поясняется, какие вычисления, функции либо процедуры должны выполняться проектируемым СПО для того, чтобы оно могло реализовать рассматриваемое решение при автоматизированном проектировании технологического процесса обработки детали на оборудовании с ЧПУ.
Этот раздел необходимо составить так, чтобы его содержание было понятно даже тем, кто не знаком с методами машинного проектирования и обработкой информации на ЭВМ.
4.3. В разделе «Описание принципа работы проектируемого СПО» раскрывается цель применения проектируемого СПО. При этом целесообразно рассмотреть в историческом аспекте развитие возможных методов решения подобных задач. Если существуют СПО, аналогичные рассматриваемому, то необходимо описать их более подробно. Здесь же в общих чертах излагаются методы, используемые при автоматизированных способах решения рассматриваемой задачи. Желательно при описании данного раздела дать ссылки на источники информации, более подробно рассматривающие вопросы, связанные с применением СПО.
4.3.1. Для пояснения принципиальных положений рассматриваемых методов вычисления, функций и процедур целесообразно включить в текст общие диаграммы (набор диаграмм), иллюстрирующие взаимосвязь частей СПО и последовательность их работы. Если общая диаграмма для пояснения всех возможных случаев работы СПО получается слишком сложной, то целесообразно помещать диаграммы для каждого отдельного случая.
4.3.2. Необходимо также установить, будет ли проектируемое СПО конечной или промежуточной версией, и описать границы этого СПО.
4.4. При описании входных данных следует указывать тип и пределы допустимых значений каждого параметра. Целесообразно для более полного раскрытия смысла каждой переменной, описание ее сопровождать соответствующими рисунками и схемами. Рекомендуется входные данные описывать для каждого проектируемого библиотечного модуля. При изложении рекомендуется вначале описывать переменные с учетом применения общепринятых математических символов, а затем уже указывать, какие символические имена (идентификаторы) они могут принимать в тексте ИД с учетом требований конкретной САП.
4.5. При описании выходных данных необходимо указать тип каждой переменной и пределы ее допустимых значений. Рекомендуется выходные данные описывать отдельно для каждого библиотечного модуля, поясняя их диаграммами и схемами. Необходимо указать, какая часть выходных данных является промежуточной информацией, то есть служит одновременно входными данными для других библиотечных модулей проектируемого СПО. Если структура выходных данных определяется математическим обеспечением САП, то необходимо указать документ, где подробно приводятся возможные виды и структура подобных данных.
4.6. В разделе «Описание этапов переработки информации» приводится шаговое описание каждого вычисления, функции и процедуры, которые должны быть выполнены ЭВМ, работающей под управлением проектируемого СПО.
4.6.1. Это описания должно быть выполнено в терминах, знакомых проектировщику СПО, который способен понять суть переработки информации, производимой ЭВМ, но не знаком детально с вопросами автоматизированного проектирования и программирования технологических процессов обработки деталей на оборудовании с ЧПУ.
4.6.2. Если описание составлено ясно и достаточно подробно, то профессиональный прикладной программист сможет приступить к проектированию и изготовлению СПО, ориентируясь в основном на информацию, помещенную в данном разделе.
4.6.3. При описании этапов переработки информации необходимо указать, какие входные данные обрабатываются на рассматриваемом этапе и какие промежуточные или выходные данные получаются в результате этой обработки.
4.6.4. Для наглядности излагаемого материала рекомендуется поместить схему проектируемого СПО, показывающую основные этапы переработки информации и последовательность их выполнения.
4.6.5. Здесь же необходимо кратко описать основные теоретические положения, методы и допущения, положенные в основу проектируемого СПО.
4.6.6. В данном разделе должны быть подробно описаны все ограничения, налагаемые выбранным методом автоматизации проектирования технологических процессов и техническими средствами. Целесообразно также указать нужную точность любого вычисления, выполняемого ЭВМ под управлением СПО, и перечислить состав комплекса технических средств, необходимого для эффективного использования СПО.
4.6.7. В заключении раздела надо изложить основной метод или технические приемы, которые будут использоваться в проектируемом СПО для исправления любых ошибок, которые могут содержаться в исходных данных.
4.7. При составлении раздела «Подготовка ИД для ЭВМ» необходимо обратить внимание на вопросы подготовки рукописи, нанесение данных на машинные носители и генерации ИД. Рекомендуется в текст раздела включить рисунок программного бланка и пояснить на примерах последовательность его заполнения. Если эта информация имеется в материалах по математическому обеспечению САП, то необходимо дать ссылку на соответствующий раздел инструкции. При описании особенностей нанесения входных данных на машинные носители рекомендуется описать применяемые приемы подготовки переменной и постоянной частей ИД, а также указать методы составления (генерации) ИД из переменной и постоянной частей ИД.
4.8. При расчете экономической эффективности в первую очередь определяются сроки осуществления проекта. Особое внимание нужно обратить на расчеты, связанные с проектированием, программированием, отладкой и проверкой проектируемого СПО. При определении стоимости проекта нужно оценивать как трудоемкость проектирования и изготовления СПО, так и стоимость комплекса технических средств и затраты на его эксплуатацию. Экономическую эффективность проектируемого СПО необходимо определять по годовой экономии приведенных затрат.
4.9. В разделе «Описание выходной машинной документации» следует описать виды выходной машинной документации и последовательность вывода ее из ЭВМ. Целесообразно привести формы всех документов и пояснить смысл включенных в них реквизитов. Если выходная документация формируется стандартными программами базового математического обеспечения, то надо дать ссылку на соответствующий раздел инструкции, в котором она описывается.
4.10. В конце приложения к ТЗ нужно привести фамилии авторов и названия научно-технической документации, которая содержит информацию, дополняющую описанные в предыдущих разделах методы автоматизированного проектирования технологических процессов, функции и процедуры, реализуемые проектируемым СПО.
5. В справочном Приложении 1 приводят пример ТЗ, разработанного с учетом основных положений изложенного метода.
6. Пример спецификации библиотеки макроопределений STEP2 к системе АЦТ СМ
|
Наименование |
Примечание |
|
|
|
ДОКУМЕНТАЦИЯ |
|
|
1.4.16001-00 |
СПЕЦИФИКАЦИЯ |
|
|
1.4.18001-00 13 01 |
МАКРООПРЕДЕЛЕНИЯ LNTH DOT, ENT, STGN, УГ100 ОПИСАНИЕ ПРОГРАММ |
|
|
1.4.18001-00 13 06 |
МАКРООПРЕДЕЛЕНИЯ П1, П2, П3, П8, П9, П10 ОПИСАНИЕ ПРОГРАММ |
|
|
1.4.18001-00 51 |
ПРОГРАММА И МЕТОДИКА ИСПЫТАНИЙ |
|
|
1.4.18001-00 91 |
МЕТОДИКА РАЗРАБОТКИ ТЕХНИЧЕСКИХ ЗАДАНИЙ НА ПРОЕКТИРОВАНИЕ И ИЗГОТОВЛЕНИЕ БИБЛИОТЕЧНЫХ МОДУЛЕЙ |
|
|
1.4.18001-00 92 |
МЕТОДИКА РАЗРАБОТКИ АЛГОРИТМОВ ПРОЕКТИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ ДЛЯ ОБОРУДОВАНИЯ С ЧПУ |
|
|
1.4.18001-00 93 |
МЕТОДИКА ПРИКЛАДНОГО ПРОГРАММИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ МОДУЛЕЙ |
|
|
1.4.18001-00 94 |
МЕТОДИКА ОФОРМЛЕНИЯ ПРОГРАММНОЙ ДОКУМЕНТАЦИИ |
|
|
|
КОМПЛЕКСЫ |
|
|
1.4.01001-00 |
СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОГРАММИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ ДЛЯ ОБОРУДОВАНИЯ С ЧПУ |
|
|
1.4.18001-00 12 02 |
ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ОТ ТОЧКИ ДО ПРЯМОЙ (DOT) |
ВЫЗЫВАЕТ LNTH |
|
|
КОМПОНЕНТЫ |
|
|
|
РАСТЕТ РАССТОЯНИЯ МЕЖДУ ТОЧКАМИ (LNTH) ТЕКСТЫ ПРОГРАММЫ |
|
|
1.4.18001-00 12 01 01 |
ТЕКСТ НА ВХОДНОМ ЯЗЫКЕ |
LHTH.M |
|
1.4.18001-00 12 01 02 |
ПРИМЕР ПРИМЕНЕНИЯ |
LNTH.APF |
|
1.4.18001-00 12 01 03 |
ПРИМЕР ВЫЗОВА ИЗ БИБЛИОТЕКИ |
LNTH.T |
|
|
ОПРЕДЕЛЕНИЕ НАИБОЛЬШЕГО ЦЕЛОГО, НЕ ПРЕВОСХОДЯЩЕГО ЗНАЧЕНИЯ E (ENT) ТЕКСТЫ ПРОГРАММЫ |
|
|
1.4.18001-00 12 02 01 |
ТЕКСТ НА ВХОДНОМ ЯЗЫКЕ |
ENT.М |
|
1.4.18001-00 12 02 02 |
ПРИМЕР ПРИМЕНЕНИЯ |
ENT.APF |
|
1.4.18001-00 12 02 03 |
ПРИМЕР ВЫЗОВА ИЗ БИБЛИОТЕКИ |
ENT.T |
7. Пример описания макроопределения, выполненного по ТЗ, c комментариями к разделам описания
Ниже помещается текст очередного раздела макроопределения, затем следует комментарий, и так для каждого из разделов.
1. Введение
1.1. В практике автоматизированного программирования фрезерных операций часто встречаются случаи описания типовых переходов предварительной выборки массива материала из зон, ограниченных с трех сторон прямыми (четырехугольных карманов). В общем случае алгоритм проектирования и программирования таких переходов достаточно сложен. Однако, введя ряд ограничений (четное число отрок с заданным шагом, ориентация строк вдоль второй заданной прямой, направление смещения строк, определяемое данным модификатором), можно значительно упростить этот алгоритм и оформить его в виде библиотечного макроопределения.
1.2. Так как такое макроопределение состоит из небольшого числа (18) операторов, то программная документация на него объединена в одном документе, сочетающем описание программы, текст программы и руководство программиста.
1.3. Комментарий.
Во введении раскрывается основное содержание решаемой задачи. Здесь должны быть ссылки на известные методы решения, отмечены характерные отличительные черты и преимущества, которые предоставляет выбранный метод решения.
При этом, как правило, раскрывается назначение макроопределения и даются общие сведения о нем. Поэтому «введение» может быть опущено или заменено «общими сведениями и функциональным назначением». Однако, наряду с «общими сведениями», автор может подготовить и «введение», чтобы дать в нем некоторую особо важную информацию о документе. В этом случае раздел «введение» может получить название «аннотация».
Необходимо следить за тем, чтобы положения, излагаемые во введении (аннотации), ограничивались общей характеристикой выбранного метода решения, а не излагали его суть.
2. Общие сведения и функциональное назначение
2.1. Макроопределение ККАРМ предназначено для проектирования типового перехода выборки массива материала, ограниченного четырьмя прямыми, причем со стороны одной из них обеспечен свободный проход в зону обработки, и расчета траектории движения инструмента при выполнении данного перехода. Список символических имен и условных обозначений переменных, использованных в макроопределении, приведен в табл. 4. Схема работы представлена на рис. 24.
2.2. Комментарий.
В этом разделе необходимо уточнить и раскрыть более полно сформулированную в названии макроопределения задачу. Здесь же нужно перечислить и кратко объяснить все функции, выполняемые макроопределением. Если макроопределение решает технологические задачи, то желательно в графической или описательной форме раскрыть их содержание, пояснить технологические приемы и правила, применяемые при этом. Целесообразно показать место макроопределения в общем процессе технологического проектирования и связь его с другими макроопределениями. При изложении материала желательно делать ссылки на литературные источники, где реализуемые методы раскрываются более подробно, а также приводить применяемые математические формулы. При составлении данного раздела целесообразно описывать только основные принципиальные моменты, характеризующие реализуемый макроопределением метод. В том же разделе помещаются также таблица символических имен и условных обозначений переменных, применяющихся в макроопределении, и схема работы макроопределения.
Таблица 4
|
Идентификатор переменной |
Математический символ |
Назначение переменной |
Примечание |
|
|
1 |
2 |
3 |
4 |
5 |
|
1 |
П1 |
ПР1 |
Левая ограничивающая прямая - аргумент |
блок 1 |
|
2 |
П2 |
ПР2 |
Правая ограничивающая прямая - аргумент |
блок 1 |
|
3 |
П3 |
ПР3 |
Основание кармана, параллельно которому формируются строки - аргумент |
блок 1 |
|
4 |
1 |
|
Индекс первой строки - аргумент |
блок 1 |
|
5 |
F1 |
Нстр |
Шаг строки - аргумент |
блок 1 |
|
6 |
F2 |
K |
Число строк (кратно 2) - аргумент |
блок 1 |
|
7 |
F3 |
ХБ, ХМ, УБ, УМ |
Модификатор положения строк - аргумент |
блок 1 |
|
8 |
F4 |
X |
Координата X точки, отсекаемой на координатной оси основанием кармана П3 |
блок 2 |
|
9 |
F5 |
У |
Координата Y точки, отсекаемой на координатной оси основанием кармана П3 |
блок 2 |
|
10 |
F6 |
a1 |
Угол между основанием кармана П3 и осью X |
блок 2 |
|
11 |
F |
|
Текущий параметр программного цикла |
блоки 2 и 4 |
|
12 |
Т10 |
|
Начальная точка |
блок 2 |
|
13 |
ПР1(1) |
|
Начальная строка - глобальная переменная |
блок 2 |
|
14 |
T1(F) |
|
Начальная строка - глобальная переменная |
блок 2 |
|
15 |
ПP1(P) |
|
Первая и каждая нечетная строка - глобальная переменная |
блок |
|
16 |
ПP1(F + 1) |
|
Вторая и каждая четная строка - глобальная переменная |
блок 3 |
|
17 |
T1(F + 2) |
|
Конечная точка текущей пары строк - глобальная переменная |
блок 3 |
|
18 |
V1 |
|
Рабочая подача - аргумент |
блок 1 |
|
19 |
V2 |
|
Ускоренная подача - аргумент |
блок 1 |
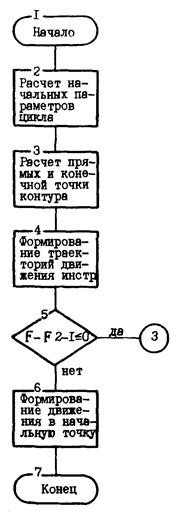
Рис. 24. Схема работы макроопределения ККАРМ
3. Описание логической структуры
3.1. Текст макроопределения на входном языке АПТ СМ представлен на рис. 25.
3.2. В блоке 1 (оператор GALL) аргументам (кроме 1, если значение его равно 1), присваиваются фактические значения.
3.3. В блоке 2 определяется значение начального параметра программного цикла F, на единицу большее значения индекса 1 первой строки. Здесь же задается рабочая подача VI, определяется с помощью геометрических стандартных функций ПГ1, ПГ2, ПГ3 и вспомогательной точки Т10 прямая ПР1(1), совпадающая с основанием кармана П3, а также точка начала обработки Т1(F).
3.4. В блоке 3 рассчитывается положение нечетной, ПР1(F) и четной ПP1(F + 1) строки с помощью оператора определения прямой, параллельной заданной и отстоящей от нее на заданное расстояние в направлении, указанном с помощью модификатора (переменная F3). Здесь же вычисляется конечная точка текущей пары строк T1(F + 2) как точка пересечения четной строки ПР1(F + 1) и правой ограничивающей прямой П2.
3.5. В блоке 4 с помощью оператора непрерывного движения КОНТ происходит формирование траектории движения инструмента вдоль текущей пары строк. Здесь же текущему значению параметра программного цикла F присваивается новое значение, большее предыдущего на две единицы.

Рис. 25. Текст макроопределения ККАРМ, подготовленный для записи в библиотеку макроопределений коллективного пользования
3.6. В блоке 5 с помощью оператора условного перехода осуществляется анализ текущего значения параметра F. Если оно меньше суммы F2 + 1, то управление передается на блок 3 и выполнение программного цикла продолжается. В противном случае управление передается на блок 6.
3.7. В блоке 6 задается ускоренная подача V2, и с помощью оператора абсолютного перемещения формируется движение в начальную точку обработки.
3.8. На этом (блок 7) работа макроопределения ККАРМ заканчивается.
3.9. Комментарий.
В этом разделе рассматривается работа макроопределения, показывается, как макроопределение реализует математический метод или функцию, для выполнения которых оно было разработано. При описании целесообразно ссылаться на символические имена переменных, схему работы макроопределения, а также на формулы, приведенные в предыдущем разделе.
4. Используемые технические средства
4.1. Для работы макроопределения необходимы те же технические средства, что и для работы системы АПТ СМ (УВК типа СМ-4).
4.2. Комментарий.
В данном разделе необходимо указать состав комплекса технических средств, который обеспечивает работу данного макроопределения, включая предварительные операции, предшествующие его вызову и загрузке, и последующие операции, которые необходимо выполнить по завершении работы.
5. Вызов и загрузка
5.1. Вызов и загрузку библиотечного макроопределения ККАРМ осуществляют препроцессором системы АПТ СМ автоматически в той логической точке исходной программы, где помещена соответствующая макрокоманда (оператор CALL). Так как при выполнении данной макрокоманды используются глобальные геометрические переменные типа точки (Т1) и прямой (ПР1), то в тексте ИД с помощью оператора РЕЗЕРВ необходимо указать размерность массивов этих переменных. Эта размерность не должна быть меньше суммы значений аргументов F2 ´ K + 1, где K - число обращений и макроопределению.
5.2. Комментарий.
При подготовке этого раздела необходимо обратить внимание на взаимодействие макроопределения c другими частями ИД. Здесь указываются идентификаторы и размерность массивов, которые необходимо зарезервировать для помещения в них входных, промежуточных и выходных данных. Если размерность массивов зависит от значений входных или промежуточных данных, а также от числа обращений к макроопределению, то необходимо привести формулы для расчета необходимой величины каждого массива. Здесь же может быть указано число переменных, используемых макроопределением, точностные характеристики, время, необходимое для решения типовой задачи. Если время изменяется в широких пределах, то целесообразно указать диапазон и причины этого изменения. Если возможно, то желательно привести формулу определения времени вычислений. В этом же разделе целесообразно указать на возможность использования макроопределения вне библиотеки. Данный раздел завершает самую большую часть программного документа, посвященную описанию программы. Далее речь пойдет об эксплуатации макроопределения. В случае простых макроопределений все описанные ранее разделы могут быть опущены.
6. Входные и выходные данные
6.1. Входными данными являются переменные (аргументы) макрокоманды ККАРМ, в том числе три геометрические переменные типа прямая, которые должны быть определены до обращения к макроопределению. Целесообразно до вызова макроопределения формально описать используемые в нем глобальные переменные:
Т1(1) = Т/0, 0
ПР1(1) = ПР/0, 0, 1, 0.
Тем самым определяются типы массивов Т1 и ПР1.
6.2. Выходными данными служат массивы геометрических переменных Т1 и ПР1 и записи промежуточного языка процессор-постпроцесcор, содержащие сведения о положении инструмента при обработке детали.
6.3. Для удобства работы описание всех входных и выходных данных представлено в табл. 6.
6.4. Комментарий.
При составлении этого раздела следует обратить внимание на краткость и однозначность изложения. Все переменные (аргументы) макроопределения должны быть пояснены, указана область допустимых значений каждого аргумента. Рекомендуется описание аргументов и глобальных переменных приводить в виде таблицы. Эти таблицы будут использованы при составлении эксплуатационной документации на библиотеку макроопределений в целом. Смысл отдельных аргументов и глобальных переменных желательно пояснить схемами и рисунками, помещенными в таблицах. В этих же таблицах необходимо приводить полностью пакеты сообщений, формируемых диагностическими подпрограммами, включенными в состав макроопределения, и пояснить результаты их работы, выводимые с помощью операторов ВПЕЧ и РЕЖИМ.
Рекомендуется разделить выводимую на печать диагностическую информацию на четыре группы:
сообщения (о конечном или промежуточном результате работы макроопределения);
предупреждения (о том, что заданная программистом информация скорректирована диагностической подпрограммой);
ошибки, исправленные формально диагностической подпрограммой;
неисправимые ошибки (выполнение макроопределения прекращено).
7. Литература
Комментарий.
Здесь должны быть приведены полные названия литературных источников, на основе которых спроектировано и изготовлено макроопределение. В данном случае такими источниками являются [2, 4].
8. Приложение 1. Входные данные микроопределения
Комментарий.
В приложении 1 помещаются входные и выходные данные макроопределения, оформленные в виде специальных таблиц (табл. 5). Требования к заполнению этих таблиц изложены в комментарии к п. 9 - 11.
9. Приложение 2. Текст макроопределения на входном языке АПТ СМ
Комментарий.
Текст макроопределения на входном языке АПТ СМ представлен на рис. 25. При подготовке этого текста к включению в библиотеку макроопределений коллективного пользования из него удаляют все комментарии и оставляют информацию, помещенную между операторами MACRO и TERMAC.
10. Приложение 3. Пример применения макроопределения
Комментарий.
Здесь помещается полный комплект выходной машинной документации, полученной при расчете ИД с использованием макроопределения, помещенного в текст ИД (табл. 6 - 9). При подготовке текстов примеров рекомендуется помещать описания макроопределений непосредственно за оператором ПОСТР. Если макроопределения используют глобальные переменные (переменные с индексом), то до оператора MACRO должен быть помещен еще и оператор РЕЗЕРВ. Рекомендуется применять различные приемы разделения текста ИД на отдельные логические части, широко использовать в тексте ИД комментарии, поясняющие смысл применяемых операторов или их отдельных групп (см. табл. 5).
Контрольные примеры должны быть по возможности короткими, но, в то же время, полными с точки зрения общей структуры ИД. С целью более качественной проверки макроопределения в контрольных примерах необходимо использовать операторы движения.
Для наглядности контроля рекомендуется совмещать начальную и конечную точку движения инструмента.
Желательно, чтобы в качестве контрольных примеров использования библиотечных макроопределений были приведены реальные программы, отработанные на станке с ЧПУ.
11. Приложение 4. Пример вызова макроопределения из библиотеки
Комментарий.
Пример вызова макроопределения из библиотеки должен быть идентичен примеру применения макроопределения, т.е. здесь помещается полный комплекс выходной машинной документации, полученной при расчете ИД с использованием библиотечного макроопределения (табл. 7 - 10).
Как видно из примера, применение библиотечных макроопределений сокращает время обработки ИД на ЭВМ на 8 - 15 %.
|
Идентификатор переменной |
Назначение переменной |
Пределы допустимых значений |
Вид диагностики |
|
1 |
2 |
3 |
4 |
|
1. П1 |
Левая ограничивающая прямая (эквидистантная обрабатываемому контуру) |
Вся область допустимых значений АПТ СМ |
АПТ СМ |
|
2. П2 |
Правая ограничивающая прямая |
Не должна совпадать с П1 |
Программист |
|
3. П3 |
Основание кармана, параллельно которому формируются строки |
Не должна совпадать с П1 |
То же |
|
4. F1 |
Шаг строки |
Вся область допустимых значений АПТ СМ |
-²- |
|
5. F2 |
Число строк |
Кратно 2 |
-"- |
|
6. F3 |
Модификатор положения строк |
Может принимать одно из значений ХБ, ХМ, УБ, УМ |
-"- |
|
7. V1 |
Рабочая подача |
Вся область допустимых значений АПТ СМ |
Программист, постпроцессор |
|
8. V2 |
Ускоренная подача |
Том |
-"- |
|
9. 1 |
Индекс первой строки |
Целое число |
Программист |
|
|
Выборка массива материала из четырехугольного кармана |
Листов 2 |
|
|
Лист 2 |
|||
|
ККАРМ |
|
ККАРМ |
|
|
ККАРМ = MACRO/П1, П2, П3, F2, F3, 1 = 1, V1, V2, F1 До обращения к макро необходимо описать: РЕЗЕРВ/Т1, ..., ПР1 Размер массивов Т1 и ПР1 должен быть больше суммы I + F2 |
|||
|
ДЕТАЛЬ ВЫЗОВ MACRO ККАРМ ИЗ БКП |
|
|
3 |
ПЕЧАТЬ |
|
4 |
ПОСТПР/Н33, 1, 1, 1 |
|
5 |
ЛИНИЯ/СПЛОШ |
|
6 |
РЕЗЕРВ/ПР1, 11, Т1, 10 |
|
7 |
ПР2 = ПР/0, 0, 0, 1 |
|
8 |
ПР3 = ПР/120, 0, 120, 1 |
|
9 |
ПР4 = ПР/0, -10, 1, -10 |
|
10 |
Т2 = Т/120, -10 |
|
11 |
И3/Т2 |
|
12 |
CALL/KKAPM, П1 = ПР2, П2 = ПР3, П3 = ПР4, ¤ |
|
12 |
F1 = 10, F2 = 8, F3 = УБ, U1 = 200, U2 = 600 |
|
13 |
ЛИНИЯ/ВЫКЛ |
|
14 |
КОНЕЦ |
КАНОНИЧЕСКИЕ ФОРМЫ
|
Х = 0,0000 |
Y = 0,0000 |
А = 90,0000 |
|
|
ПР3 |
Х = 120,0000 |
Y = 0,0000 |
А = 90,0000 |
|
ПР4 |
Х = 0,0000 |
Y = -10,0000 |
А = 0,0000 |
|
Т2 |
Х = 120,0000 |
Y = -10,0000 |
Z = 0,0000 |
|
T10 |
Х = 0,0000 |
Y = -10,0000 |
Z = 0,0000 |
|
ПР1 (1) |
Х = 0,0000 |
Y = -10,0000 |
А = 0,0000 |
|
Т1 (2) |
Х = 120,0000 |
Y = -10,0000 |
Z = 0,0000 |
|
ПР1 (2) |
Х = 0,0000 |
Y = 0,0000 |
А = 0,0000 |
|
ПР1 (3) |
Х = 0,0000 |
Y = 10,0000 |
А = 0,0000 |
|
Т1 (4) |
Х = 120,0000 |
Y = 10,0000 |
Z = 0,0000 |
|
ПР1 (4) |
Х = 0,0000 |
Y = 20,0000 |
А = 0,0000 |
|
ПР1 (5) |
Х = 0,0000 |
Y = 30,0000 |
А = 0,0000 |
|
Т1 (6) |
Х = 120,0000 |
Y = 30,0000 |
Z = 0,0000 |
|
ПР1 (6) |
Х = 0,0000 |
Y = 40,0000 |
А = 0,0000 |
|
ПР1 (7) |
Х = 0,0000 |
Y = 50,0000 |
А = 0,0000 |
|
Т1 (8) |
Х = 120,0000 |
Y = 50,0000 |
Z = 0,0000 |
|
ПР1 (8) |
Х = 0,0000 |
Y = 60,0000 |
А = 0,0000 |
|
ПР1 (9) |
Х = 0,0000 |
Y = 70,0000 |
А = 0,0000 |
|
Т1 (10) |
X = 120,0000 |
Y = 70,0000 |
Z = 0,0000 |
|
2 ПЕЧАТЬ |
|
3 ПОСТПР/Н33, 1, 1, 1 |
|
4 ЛИНИЯ/СПЛОШ |
|
5 PE3EPB/ПР1, 11, Т1, 10 |
|
6 ККАРМ = MACRO/П1, П2, П3, F2, F3, 1 = 1, U1, U2, F1 |
|
1 ¤¤ 1. НАИМЕНОВАНИЕ MACRO И ЕГО АРГУМЕНТЫ |
|
2 ¤¤ MACRO ВЫБОРКИ МАССИВА ИЗ ЧЕТЫРЕХУГОЛЬНОГО КАРМАНА |
|
3 ¤¤ П1 - ЛЕВАЯ ОГРАНИЧИВАЮЩАЯ ПРЯМАЯ |
|
4 ¤¤ П2 - ПРАВАЯ ОГРАНИЧИВАЮЩАЯ ПРЯМАЯ |
|
5 ¤¤ П3 - ОCHОBAНИЕ KAPMAНA, ПАРАЛЛЕЛЬНО КОТОРОМУ |
|
6 ¤¤ ФОРМИРУЮТСЯ СТРОКИ |
|
7 ¤¤ F1 - ШАГ СТРОКИ |
|
8 ¤¤ F2 - ЧИСЛО СТРОК (КРАТНО ДВУМ) |
|
9 ¤¤ F3 - МОДИФИКАТОР ПОЛОЖЕНИЯ СТРОК |
|
10 ¤¤ U1 - РАБОЧАЯ ПОДАЧА |
|
11 ¤¤ U2 - УСКОРЕННАЯ ПОДАЧА |
|
12 ¤¤ 2. РАСЧЕТ НАЧАЛЬНЫХ ПАРАМЕТРОВ ЦИКЛА |
|
13 F = 1 + 1 |
|
14 ПОДАЧА/U1 |
|
15 F4 = ПГ1 (П3) |
|
16 F5 = ПГ2 (П3) |
|
17 F6 = ПГ3 (П3)/0,017453 |
|
18 Т10 = Т/F4, F5 |
|
19 ПР1 (1) = ПР/Т10, УГ, F6 |
|
20 Т1 (F) = Т/ПРС, ПР1 (1), П2 |
|
21 ¤¤ 3. РАСЧЕТ ПРЯМЫХ И КОНЕЧНОЙ ТОЧКИ КОНТУРА |
|
22 1) ПР1 (F) = ПР/ПРЛ, ПР1 (F - 1), F3, F1 |
|
23 ПР1 (F + 1) = ПР/ПРЛ, ПР1 (F), F3, F1 |
|
24 Т1 (F + 2) = T/ПРС, ПР1 (F + 1), П2 |
|
25 ¤¤ 4. ФОРМИРОВАНИЕ ДВИЖЕНИЯ |
|
26 КОНТ/T1 (F), П2, ПР1 (F), П1, ПР1 (F + 1), T1 (F + 2) |
|
27 F = F + 2 |
|
28 ¤¤ 5. ПРОВЕРКА ОКОНЧАНИЯ ЦИКЛА |
|
29 ЕСЛИ (F - F2 - 1) 1, 1, 2 |
|
30 ¤¤ 6. ФОРМИРОВАНИЕ ДВИЖЕНИЯ В НАЧАЛЬНУЮ ТОЧКУ |
|
31 2) ПОДАЧА/U2 |
|
32 ИДИ/Т1 (1 + 1) |
|
33 ТЕРМАС |
|
7 ПР2 = ПР/0, 0, 0, 1 |
|
8 ПР3 = ПР/120, 0, 120, 1 |
|
9 ПР4 = ПР/0, -10, 1, -10 |
|
10 Т2 = Т/120, -10 |
|
11 И3/Т2 |
|
12 САLL/ККАРМ, П1 = ПР2, П2 = ПР3, П3 = ПР4, ¤ |
|
12 F1 = 10, F2 = 8, F3 = УБ, U1 = 200, U2 = 600 |
|
13 ЛИНИЯ/ВЫКЛ |
|
14 КОНЕЦ |
|
00 - 00 |
ПОСТПРОЦЕССОР |
Н33 |
ВРЕМЯ |
00:17:59 |
ЛИСТ 1 |
|||
|
РПОМ |
ДЕТАЛЬ |
ККАРМ |
КООРДИНАТЫ ОПОРНЫХ ТОЧЕК |
|||||
|
СТАНОК |
МА-655СМН |
|||||||
|
РАСПЕЧАТКА УПРАВЛЯЕМОЙ ПРОГРАММЫ |
X |
Y |
Z |
|||||
|
11 |
N001G17LF |
120,0000 |
-10,0000 |
0,0000 |
||||
|
26 |
N002G01Y + 001000F0620LF |
120,0000 |
0,0000 |
0,0000 |
||||
|
26 |
N003X - 012000LF |
0,0000 |
0,0000 |
0,0000 |
||||
|
26 |
N004Y + 0001000LF |
120,0000 |
10,0000 |
0,0000 |
||||
|
26 |
N005X + 012000LF |
120,0000 |
10,0000 |
0,0000 |
||||
|
26 |
N006Y + 012000LF |
120,0000 |
20,0000 |
0,0000 |
||||
|
26 |
N007X - 012000LF |
0,0000 |
20,0000 |
0,0000 |
||||
|
26 |
N008Y + 001000LF |
0,0000 |
30,0000 |
0,0000 |
||||
|
26 |
N009X + 012000LF |
120,0000 |
30,0000 |
0,0000 |
||||
|
26 |
N010Y + 001000LF |
120,0000 |
40,0000 |
0,0000 |
||||
|
26 |
N011X - 012000LF |
0,0000 |
40,0000 |
0,0000 |
||||
|
26 |
N012Y + 001000LF |
0,0000 |
50,0000 |
0,0000 |
||||
|
26 |
N013X + 012000LF |
120,0000 |
50,0000 |
0,0000 |
||||
|
26 |
N014Y + 001000LF |
120,0000 |
60,0000 |
0,0000 |
||||
|
26 |
N015X - 012000LF |
0,0000 |
60,0000 |
0,0000 |
||||
|
26 |
N016Y + 001000LF |
0,0000 |
70,0000 |
0,0000 |
||||
|
26 |
N017X - 012000LF |
120,0000 |
70,0000 |
0,0000 |
||||
|
32 |
N018Y - 008000Г0660LF |
120,0000 |
-10,0000 |
0,0000 |
||||
|
14 |
N019F0000М02LF |
120,0000 |
-10,0000 |
0,0000 |
||||
ВРЕМЯ ОБРАБОТКИ В МИНУТАХ............................................. 5,33
ДЛИНА ПЕРФОЛЕНТЫ В МЕТРАХ............................................ 0,78
ПРИРАЩЕНИЯ КООРДИНАТ В ИМПУЛЬСАХ ДХ = 0,00
ДY = 0,00
ДZ = 0,00
|
ДЕТАЛЬ ВЫЗОВ MACRO ККАРМ ИЗ БКП |
|
|
2 |
ПОСТПР/Н33, 1, 1, 1 |
|
3 |
ЛИНИЯ/СПЛОШ |
|
4 |
РЕЗЕРВ/ПР1, 11, Т1, 10 |
|
5 |
ПР2 = ПР/0, 0, 0, 1 |
|
6 |
ПР3 = ПР/120, 0, 120, 1 |
|
7 |
ПР4 = ПР/0, -10, 1, -10 |
|
8 |
Т2/120, -10 |
|
9 |
И3/Т2 |
|
10 |
САLL/ККАРМ, П1 = ПP2, П2 = ПР3, П3 = ПР4, ¤ |
|
11 |
F1 = 10, F2 = 8, F3 = УБ, U1 = 200, U2 = 600 |
|
12 |
ЛИНИЯ/ВЫКЛ |
|
13 |
КОНЕЦ |
8. Справочное. Пример макроопределения обработки типового элемента по схеме «Строка»
МАКРО М1 (’ДХ’ = ’0’, ’ДУ’ = ’0’, ’Ф0’ = ’0’, ’Ф1’ = ’90’, ’П0’ = ’2’, ’П1’ = ’0’, % ’П2’ = ’0’, ’ТЧКОН’ = ’ТЧИС’, ’Ж’ = ’0’)
¤
¤ ОБРАБОТКА ТИПОВЫХ ЭЛЕМЕНТОВ КОНТУРА
¤ ОБРАЗОВАННЫХ ПРЯМЫМИ, ПО СХЕМЕ СТРОКА
¤
¤ ПАРАМЕТРЫ МАКРОСА:
¤
¤ ОБЯЗАТЕЛЬНЫЕ:
¤ АХ - РАЗМЕР ГЭФ В НАПРАВЛЕНИИ ОСИ X
¤ АY -
¤ РАД -
¤ ПД -
¤ ТЧИС -
¤ ДОПОЛНИТЕЛЬНЫЕ (В СКОБКАХ - ЗНАЧЕНИЕ ПО УМОЛЧАНИЮ):
¤ ’ДХ’ - СМЕЩЕНИЕ ПО X ЛОКАЛЬНОЙ СИСТЕМЫ КООРДИНАТ (0)
¤ ’ДY’ - СМЕЩЕНИЕ ПО Y ЛОКАЛЬНОЙ СИСТЕМЫ КООРДИНАТ (0)
¤ ’Ф0’ - УГОЛ ПОВОРОТА ЛОКАЛЬНОЙ СИСТЕМЫ КООРДИНАТ (0)
¤ ’Ф1’ - УГОЛ НАКЛОНА ТЭФ (90)
¤ ’П0’ - ВЕЛИЧИНА ПЕРЕБЕГА В НАПРАВЛЕНИИ -Y (2)
¤ ’П1’ - ВЕЛИЧИНА ПЕРЕБЕГА В НАПРАВЛЕНИИ +X (0)
¤ ’П2’ - ВЕЛИЧИНА ПЕРЕБЕГА В НАПРАВЛЕНИИ +Y (0)
¤ ’Ж’ - ГЛУБИНА ТЭФ (0)
¤ ’ТЧКОН’ - КООРДИНАТЫ КОНЕЧНОЙ ТОЧКИ (ТЧИС)
¤
¤ ВНУТРЕННИЕ МАКРОСЫ: UGMP, ULU1, ULUK
¤
ВЕЩ, ВВ, ВГ, НГ, НВ
ПРЯМАЯ ПР0 (1), ПР1 (50), ПР2 (1), ПР3 (1)
ТОЧКА ТЧК, ТЧН, ТЧМ
МАТР М1
М1 = ПОВХУ, &Ф0, ПЕРЕНОС, &ДХ, &ДY
ВЫЗОВ UGMP (’П1’ = ’&П1’, ’П2’ = ’&П2’, ’Ф1’ = ’&Ф1’, ’П0’ = ’&П0’)
Н = НВ
ЕСЛИ ((ЦЕЛ (Н/2)) НРВ (Н/2)) Н = Н + 1
В = (АХ ´ СИН (&Ф1) - 2 РАД + &П1)/(Н - 1)
ПОВТОР К = 2, Н - 1
С = (К - 1) ´ В
ПР1 (К) = ПАРЛЕД, ПР1 (1), С, ХМ
КОНЦИКЛ К
¤ ТРАЕКТОРИЯ ДВИЖЕНИЯ
ВЫЗОВ UDU1 (’Ж’ = ’&Ж’)
ПОВТОР К = Н - 1, 2, -2
BПPABO ПР2 (1): ПР1 (К) НА ПР0 (1)
ВЛЕВО ПР0 (1): ПР1 (К - 1) НА ПР2 (1)
КОНЦИКЛ К
ВПРАВО ПР2 (1): ПР1 (1) НА ПP0 (1)
ВЫЗОВ UDUK (’Ж’ = ’&Ж’, ’ТЧКОН’ = ’&ТЧКОН’)
КОНМАК.
9. Пример реализации типового метода автоматизации подготовки УП c применением системы ТЕХТРАН-Т
9.1. Техтран-Т представляет собой развитие базовой САП Техтран и выполнен как технологический процессор для программирования токарных операций. Технологический процессор используется совместно с геометрическим процессором, а его входной язык - расширение входного языка геометрической САП путем включения технологических операторов.
9.1.1. Основное условие расширения технологических возможностей САП - независимость блоков геометрического и технологического процессоров. Это условие продиктовано преемственностью работ и необходимостью поддерживать стабильность функционирования системы при внесении в нее изменений.
9.1.2 Способ обработки технологических операторов в САП должен обеспечивать генерацию записей расширенного формата промежуточного языка типа 28000 и 29000 при преобразовании операторов технологического процессора. Записи этого типа рекомендованы для использования при растирании функциональных возможностей САПР/МР 209-86, ISO 4343/.
9.1.3 Расширенный вариант промежуточного языка CLDATA, а рассмотренный ранее (стандартный) - CLDATA2. Технологический процессор обрабатывает технологические и геометрические данные в формате расширенного языка процессор-постпроцессор (CLDATA1) и преобразовывает их в стандартный формат для связи c постпроцессором.
9.2. Структура САП Техтран-Т с расширенными технологическими возможностями представлена на рис. 26.
9.2.1. Исходный текст программы на входном языке системы вначале обрабатывается процессором, который организован в виде трех последовательно выполняемых программ: компилятора, интерпретатора и интерполятора.
9.2.2. Компилятор осуществляет синтаксический контроль исходной программы, вставку текстов и макрогенерацию, а также получение листинга исходной программы.
9.2.3. Интерпретатор производит расчет всех типов выражений, выполняет команды управления исполнителем программы и выдает распечатку значений переменных и массивов.
9.2.4. Интерполятор выполняет расчет траектории движения инструмента. При обнаружении ошибок на каждом из шагов на печать выводятся диагностические сообщения.
9.2.5. Результаты работы процессора формируются в оперативной памяти в виде массива данных CLDATA1 и выводятся на печать в виде листинга исходной программы, распечатки значений рассчитанных переменных и координат опорных точек траектории движения инструмента.
9.2.6. Исходные данные для работы технологического процессора образуют сформированный на предыдущем шага массив CLDATA1. Технологический процессор организован в виде главной программы (синтаксического анализатора) и трех подпрограмм, предназначенных для проектирования переходов точения, сверления центральных отверстий и обработки канавок.
9.2.7. Синтаксический анализатор осуществляет: синтаксический (и семантический) контроль исходных конструкций языка; встройку фасок, округлений и канавок в контур детали; формирование промежуточных описаний инструментов и контуров детали и заготовки, подготовки доходных данных для расчета режимов резания; передачу управления программам и распечатку результатов расчета.

Рис. 26. Структура САП с расширенными технологическими возможностями
9.2.8. Подпрограммы проектирования переходов формируют кадры описания смены инструмента, выделяют зону обработки с учетом припусков, отсекают в этой зоне закрытые участки и запретные зоны, определяют исходную точку обработки, формируют кадры подвода инструмента в исходную точку обработки на быстром ходу с учетом обхода препятствий, формируют кадры проходов со всеми необходимыми технологическими командами обработки зоны и возвращают управление главной задаче.
9.2.9. Формируемые перемещения инструмента и режимы обработки каждого перехода заносят в массив CLDATA2. Произведенные технологическим процессором расчеты и диагностические сообщения выдаются на печать.
9.2.10. Результаты работы технологического процессора поступают в постпроцессор, который вызывается головной программой в зависимости от хода станка из набора содержащихся в системе постпроцессоров.
9.2.11. Постпроцессор системы производит расчет коррекции кодов подач и скоростей вращения шпинделя, выделение участков разгона и торможения, формирование технологических команд, сегментацию больших перемещений, формирование и вывод на печать и перфоленту управляющей программы.
9.2.12. Для контроля траектории движения инструмента, контура детали и заготовки технолог-программист может использовать графопостроитель или графический дисплей. В системы Техтран-Т имеется графический постпроцессор считывающий из массива CLDATA2 описание контуров детали и заготовки и команды движения инструмента и формирующий графическую информацию, которая может выводиться в любой момент обработки в заданном пользователем порядке и масштабе.
9.3. Рассмотрим описание основных операторов языка технологического процессора Техтран-Т и его функциональные возможности.
9.3.1. Язык системы - расширенный язык САП Техтран со свободным форматом записи и предназначен для программирования токарных переходов. С этой целью необходимо описать половину контура детали и заготовки относительно продольной оси.
9.3.2. Контуры программируют в виде последовательности геометрических элементов (прямых, дуг, окружностей, округлений, фасок) в правосторонней декартовой системе координат X0Y по или против часовой стрелки. В контур детали могут быть встроены контуры канавок, описанные отдельно, как разомкнутые контуры. Один раз вписанный контур канавки может быть встроен в различных местах контура детали, путем введения точек привязки.
9.3.3. Контур детали и заготовки задают в местной системе координат (СК ДЕТАЛЬ). Для связи системы координат детали с системой координат станка необходимо ввести два оператора:
ПАТРОН, задающий положение патрона относительно начала системы координат станка;
ЗАЖИМ, задающий положение системы координат детали относительно патрона.
9.3.4. Для формирования траектории инструмента и промежуточных состояний заготовки на различных стадиях обработки детали возможно задание величины припуска.
9.3.5. Припуск на чистовую или тонкую чистовую обработку может быть задан как глобально на одну или несколько зон обработки с помощью оператора ПРИПУСК, так и локально на отдельный элемент контура детали. Аналогично вносится другая технологическая информация (марка материала, шероховатость и др.).
9.3.6. Для описания товарных переходов служат следующие операторы:
ТОЧЕН - черновое, чистовое и тонкое листовое течение открытых и закрытых зон;
КАНАВ - точение канавок;
РРЕЗ - нарезание резьбы резцом;
мРЕЗ - нарезание резьбы метчиком;
СВЕРЛ - сверление;
РАЗВЕР - развертывание;
СЗЕН - зенкерование спиральным зенкером;
ЦЕКОВ - цекование;
ЦЕНТРОВ - центрование;
КЗЕН - конусное зенкерование;
РАСТЧ - растачивание.
9.3.7. Операторы описания переходов содержат всю технологическую информацию, необходимую для программирования заданного перехода. Одним из параметров оператора технологического перехода служит его имя.
9.3.8. Вызов нужного оператора перехода осуществляется с помощью оператора вызова обработки (ВЫЗОБР) по его имени перед зоной обработки.
9.3.9. Задание зоны обработки производится с помощью оператора ЗОНА, который имеет два формата:
зона, задаваемая метками на элементах контура (метки задаются при описании контура детали):
![]()
зона, определяемая точкой вдоль оси X для центровых переходов ЗОНА, ЦЕНТР, Х.
9.4. Технологический процессор осуществляет синтаксический и семантический анализ исходной программы и определяет необходимость смены инструмента. Если смена инструмента производится, то инструмент выводится в предварительно заданную точку смены. При этом формируются все необходимые записи CLDATA2 для смены инструмента (выбор, номер и загрузка инструмента). Если зона задана метками на контуре детали, то процессор осуществляет выделение зоны обработки.
9.4.1. В пределах выделенной зоны выполняется формирование перемещений инструмента в процессе обработки заготовки. Автоматически формируется подвод инструмента из текущей точки его положения в определенную стартовую точку прохода с учетом обхода возможных препятствий по кратчайшему пути. Также автоматически формируется рабочий ход по обработке заготовки, отскок и возврат в стартовую точку следующего перехода, которая определяется заранее. Процесс формирования проходов повторяется до тех пор, пока не будет снят весь слой заготовки в зоне с учетом заданного припуска. Для обработки одной зоны могут быть вызваны до десяти технологических переходов одновременно в операторе ВЫЗОБР. По мере обработки зоны производится корректировка контура заготовки в зоне.
9.4.2. Для обработки одной зоны несколькими технологическими переходами контур заготовки для последующей обработки может быть задан путем назначения припусков ЧИСТ, ТЧИСТ на всю зону или отдельный ее элемент. По заданным величинам припусков процессор осуществляет формирование контуров заготовки, которые будут использованы при программировании следующих переходов.
9.4.3. Расчет режимов резания (подачи, скорости и глубины) если они не заданы при описании перехода, выполняется модулем расчета режимов, который использует для своей работы данные из библиотеки материалов, инструментов и станков.
9.4.4. Параметры инструмента могут задаваться также в исходной программе обработки оператором НОМИНСТР. В этом случае они будут использованы модулем расчета режимов резания.
Графические средства языка Техтран-Т предоставляют пользователю возможность вывода исходных данных (контуры детали и заготовки) и результатов (траектория инструмента, промежуточное состояние заготовки) в желаемом масштабе с расположением их в любом месте чертежа или экрана дисплея. Ниже приведен пример программирования на языке Техтран-Т для детали и заготовки, приведенных на рис. 27.

Рис. 27. Чертеж детали и заготовки.
![]() -
заготовка
-
заготовка
![]() - деталь
- деталь
1 # ’SY: [73, 3] SYNTAB. TEX; 1’
2 ДЕТАЛЬ ’МАТРИЦА’
3 СТАНОК ’16К20’, 109, 1
4 ВЫЗОВ МАТР (Д1 = 134, Д2 = 140, Д3 = 52, ДЕЛ1 = 8,7, ДЕЛ2 = 11, ДЕЛ3 = 20, %
5 ДЕЛ = 16,3, Н = 41, НП0 = 104, ДМАТ = 155)
6 ВЫЗОВ ЗАГ (Д = 160, Д3 = 53, ДЕЛ1 = 8,7, Н = 41, НП0 = 104)
7 #
8 # ОБЩИЕ ТЕХНОЛОГИЧЕСКИЕ ОПРЕДЕЛЕНИЯ
9 #
10 # ЗАДАНИЕ ТОЧКИ СМЕНЫ ИНСТРУМЕНТА
11 #
12 ТЧКСМЕН 200, 200
13 БЕЗОПРСТ 1, 2
14 #
15 # ЗАДАНИЕ ПРИПУСКА НА ЧИСТОВУЮ И ТОНКУЮ ЧИСТОВУЮ ОБРАБОТКУ
16 #
17 ПРИПУСК ЧИСТ, 0,5, ТЧИСТ, 0
18 #
19 # ПРИВЯЗКА СИСТЕМЫ КООРДИНАТ ДЕТАЛИ К СИСТЕМЕ КООРДИНАТ СТАНКА
20 #
21 КООРДСТ -50,0
22 ПАТРОН 1, 50, 100, 30
23 ЗАЖИМ 0
24 #
25 # ОПИСАНИЕ ИНСТРУМЕНТА
26 #
27 # КИНСТ1 - ДЛЯ ПРОДОЛЬНОГО ТОЧЕНИЯ
28 # КИНСТ2 - ДЛЯ ПОДРЕЗКИ ТОРЦА
29 #
30 РАСПИН СЛЕВА
31 НОМИНСТР 1, 1, ВЫЛЕТ, -30, -80, РАДИУС, 0,3, НОМКОР, ХУПЛ, 3, УГУСТ, 90 %
32 СЛЕВА, УГОЛ, 93, 12 %
33 РЕЖКР, 12, НАПРП, КРАТ, НАПРО, КРАТ
34 НОМИНСТР 2, 2, ВЫЛЕТ, -50, -30, РАДИУС, 0,3, НОМКОР, ХКООРД, 7, УГУСТ, 0 %
35 СПРАВА, УГОЛ, 93, 12 %
36 РЕЖКР, 12, НАПРП, КРАТ, НАПРО, КРАТ
37 #
38 # ОПИСАНИЕ ТЕХНОЛОГИЧЕСКИХ ПЕРЕХОДОВ
39 #
40 ТОЧЕНИЕ Т1, ЧЕРН, ПОДЧИСТЗ, ОТКР, ПРОД, КИНСТ, 1 %
41 ОБМИН, 400, ГЛРЕЗ, 2, ММОБ, 0,12, ОХЛ, 1
42 ТОЧЕНИЕ Т2, ЧИCT, ОTKP, КИНСТ, 1 %
43 ОБМИН, 600, ММОБ, 0,7, ОХЛ, 1
44 #
45 ТОЧЕНИЕ Т3, ЧЕРН, ПОДЧИСТ3, ОТКР, ППЕР, КИНСТ, 2 %
46 ОБМИН, 400 ГЛРЕЗ, 3, ММОБ, 0,12, ОХЛ, 1
47 ТОЧЕНИЕ Т4, ЧИСТ, ОТКР, КИНСТ, 2 %
48 ОБМИН, 600, ММОБ, 0,7, ОХЛ, 1
49 #
50 # ПРОДОЛЬНОЕ ТОЧЕНИЕ С ПОДЧИСТКОЙ
51 # ЧИСТОВОЙ ПРОХОД
52 #
53 ВЫЗОБР ’Т1’
54 ИЗ 200, 200
55 ЗОНА ’М5’, ПРОТИВ, ’М3’
56 ВЫЗОВ ’Т2’
57 ЗОНА ’М5’, ПРОТИВ ’М3’
58 #
59 # ПОДРЕЗКА ТОРЦА С ПОДЧИСТКОЙ
60 # ЧИСТОВОЙ ПРОХОД
61 #
62 ВЫЗОБР ’Т3’
63 ЗОНА ’М5’, ПО, ’М6’
64 ВЫЗОБР ’Т4’
65 ЗОНА ’М5’, ПО, ’М7’
66 #
67 # ОБРАБОТКА С ОБРАТНОЙ СТОРОНЫ
68 #
69 ПАТРОН 1, 87,7, 100, 30
70 ЗАЖИМ 87,7, ОБРАТ
71 ВЫЗОБР ’Т1’
72 ЗОНА ’М1’, ПО, ’M4’
73 ВЫЗОБР ’Т2’
74 ЗОHA ’М1’, ПО, ’M4’
75 ВЫЗОБР ’Т3’, ’Т4’
76 ЗОНА ’M1’, ПРОТИВ, ’К1’
77 #
78 КОНЕЦ
MAKPO MAТP
#
# ОПИСАНИЕ ГЕОМЕТРИИ
#
ТЧ0 = 0, 0
ТЧ1 = ДЕЛ1, 0
ПРХ = ХПАР, 0
ПРY = УПАР, 0
ПРХ1 = ХПАР, Д3/2
ПРХ2 = ХПАР, Д1/2
ПРХ3 = ХПАР, Д2/2
ПРХ4 = ХПАР, ДМАТ/2
ПРХ5 = ХПАР, Д/2
ПРY1 = УПАР, ДЕЛ1
ПРY2 = УПАР, ДЕЛ1 + ДЕЛ2
ПРY3 = УПАР, ДЕЛ1 + Н
ПРY4 = УПАР, НПО - ДЕЛ4 - ДЕЛ3
ПРY5 = УПАР, НПО - ДЕЛ4
ПРУ6 = УПАР, НПО
#
# ОПИСАНИЕ КОНТУРА ДЕТАЛИ
#
КОНДЕТ К1 = И3, ТЧ1, УБ
M1: ВПЕРЕД ПРY1 НА ПРХ2
М2: ФАСКА 3, 3
ВПРАВО ПРХ2 НА ПРY2
М3: ВЛЕВО ПРY2 НА ПРХ4
М4: ВПРАВО ПРХ4 НА ПРY4
ВПРАВО ПРY4 НА ПРХ3
М5: ВЛЕВО ПРХ3 НА ПРY5
М6: ВПРАВО ПРY5 НА ПРХ1
М7: СКРУГ 3
ВПРАВО ПРХ1
ВЛЕВО ПРY3
ВПРАВО ПРХ НА ПРY1
КОНКОНТ
КОНМАК
МАКРО ЗАГ
#
# ОПИСАНИЕ ГЕОМЕТРИИ ЗАГОТОВКИ
#
ТЧ0 = 0, 0
ТЧ1 = ДЕЛ1, 0
ПРХ = ХПАР, 0
ПРY = YПАР, 0
ПРХ1 = ХПАР, Д3/2
ПРХ5 = ХПАР, Д/2
ПРУ1 = YПАР, ДЕЛ1
ПРУ3 = YПАР, ДЕЛ1 + Н
ПРУ6 = YПАР, НПО
#
# ОПИСАНИЕ КОНТУРА ЗАГОТОВКИ
#
КОНЗАГ ЗАГ = И3, ТЧ0, УБ
ВПЕРЕД ПРY НА ПРХ5
ВПРАВО ПРХ5 НА ПРY6
ВПРАВО ПРY6 НА ПРХ1
ВПРАВО ПРХ1 НА ПРY3
ВЛЕВО ПРУ3 НА ПРХ
ВПРАВО ПРХ НA ПРY
КОНКОНТ
KOHMAК
СТРОКА 1 - этот оператор задает транслятору информации о таблицах системы ТЕХТРАН-Т;
СТРОКА 2 - начало программы. В апострофах указывается производная информация, идентифицирующая деталь. Эта информация будет выведена на управляющую перфоленту в текстовом виде;
СТРОКА 3 - задание кода постпроцессора и имени станка;
СТРОКИ 4 - 6 - макровызовы описаний контуров детали и заготовки;
СТРОКИ 7 - 11 - комментарий;
СТРОКА 12 - оператор определения координат центра резцедержателя (револьверной головки) инструмента в системе координат детали;
СТРОКА 13 - определение величины недохода (1 мм) и перебега (2 мм);
СТРОКИ 14 - 16 - комментарий;
СТРОКА 17 - оператор назначения припуска на чистовую обработку (0,5 мм) и тонкую чистовую обработку (0 мм);
СТРОКИ 18 - 20 - комментарий;
СТРОКА 21 - оператор задает начало системы координат «станок» в системе координат «деталь» (х = -50, y = 0);
СТРОКА 22 - оператор задает параметры приспособления для установки и закрепления заготовки;
1 - идентификационный номер патрона;
50 мм - координата базовой плоскости патрона в системе координат станка;
100 мм - максимальный наружный диаметр патрона;
30 мм - расстояние между базовой плоскостью и передним торцем патрона в системе координат патрона;
СТРОКА 23 - оператор служит для совмещения базовой плоскости патрона с базовой плоскостью детали:
0 (87,7) - координата «х» базовой плоскости детали в системе координат детали;
ОБРАТ - задает поворот детали на 180 градусов в плоскости «ху» относительно базовой плоскости;
СТРОКИ 24 - 29 - комментарий;
СТРОКА 30 - оператор указывает расположение инструмента относительно положительного направления оси «х» (здесь - слева);
СТРОКИ 31 - 33 - оператор задает геометрические параметры инструмента:
1,1 - идентификационный номер инструмента и номер его позиции в магазине станка;
ВЫЛЕТ, -30, -80 - величины вылетов по осям «х» и «у» от центра резцедержатели до центра вершины инструмента в системе координат резцедержателя;
РАДИУС, 0,3 - величина радиуса округления инструмента, мм;
НОМКОР, ХУПЛ, 3 - модификатор задания парного корректора Н 3;
УГУСТ, 90 - установка инструмента под углом 90 градусов к оси «х» в системе координат «деталь»;
СЛЕВА - положение главной режущей кромки инструмента относительно направления подачи;
УГОЛ 93, 12 - главный и вспомогательный углы в плане;
РЕЖКР, 12 - задание длины режущей кромки инструмента, мм;
НАПРП, КРАТ - задание направления начального перемещения инструмента при подводе в стартовую точку зоны обработки (здесь - кратчайшее);
НАПРО, КРАТ - задание направления начальном перемещения инструмента при отводе из финишной точки зоны обработки (здесь - кратчайшее);
СТРОКИ 34 - 36 - см. СТРОКИ 31 - 33;
СТРОКИ 37 - 39 - комментарий;
СТРОКИ 40, 41 - оператор чернового продольного точения с подчисткой зоны обработки 1-ым инструментом;
ОБМИН, 400 - обороты шпинделя, об/мин;
ГЛРЕ3, 2 - глубина резания, мм;
ММОБ, 012 - подача, мм/об;
ОХЛ, 1 - охлаждение из первого трубопровода;
СТРОКИ 42 - 43 - см. СТРОКИ 41 - 42 (чистовое);
СТРОКА 44 - комментарий;
СТРОКИ 45 - 46 - см. СТРОКИ 41 - 42 (черновое);
СТРОКИ 47 - 48 - см. СТРОКИ 41 - 42 (чистовое);
СТРОКИ 49 - 52 - комментарий;
СТРОКА 53 - вызов технологического перехода;
СТРОКА 55 - задание зоны обработки;
СТРОКА 56 - вызов технологического перехода;
СТРОКА 57 - задание зоны обработки;
СТРОКИ 58 - 61 - комментарий;
СТРОКА 62 - вызов технологического перехода;
СТРОКА 63 - задание зоны обработки;
СТРОКА 64 - вызов технологического перехода;
СТРОКА 65 - задание зоны обработки;
СТРОКИ 66 - 60 - комментарий;
СТРОКА 69 - см. СТРОКУ 22;
СТРОКА 70 - см. СТРОКУ 23;
СТРОКА 71 - вызов технологического перехода;
СТРОКА 72 - задание зоны обработки;
СТРОКА 73 - вызов технологического перехода;
СТРОКА 74 - задание зоны обработки;
СТРОКА 75 - вызов технологического перехода;
СТРОКА 76 - задание зоны обработки;
СТРОКА 77 - комментарий;
СТРОКА 78 - конец программы.
ПРИМЕЧАНИЕ. МАКРО МАТР - описание контура детали;
МАКРО ЗАГ - описание контура заготовки.
10. Пример реализации типового метода автоматизации в рамках системы ЕСПС-ТАУ
Обработка детали
Наименование детали - ПЛИТА, номер детали - АСК-12.
На вертикально-фрезерном станке мод. 6520ФЗ с системой ЧПУ «Н33-1М» и вертикально-сверлильном станке мод. 2Р135Ф2 с системой ЧПУ «КС-70».
Приведены:
- эскиз детали (рис. 8);
- исходная программа;
- описание исходной программы;
- комплект выходной документации;
- маршрутная карта;
- карта наладки станка;
- распечатка управляющей программы.
Описание исходной программы
Строка 1 - Задается код технологического процесса, имя файла ’КТ1’
Строка 2 - Задается код чертежа детали ’АСК-12’, наименование чертежа ’ПЛИТА’
Строка 3 - Задается код обрабатываемого материала ’С421-40’
Строка 4 - Задается вид заготовки ’ЛИТЬЕ’, габаритные размеры заготовки цилиндрической формы, 500, 300, 400, 315.
Строка 5 - Задается наименование операции, номер операции, 5, ’ФРЕЗЕРНАЯ’
Строка 6 - Задается модель оборудования ’6520Ф3’, наименование оборудования ’ФРЕЗЕРНЫЙ’
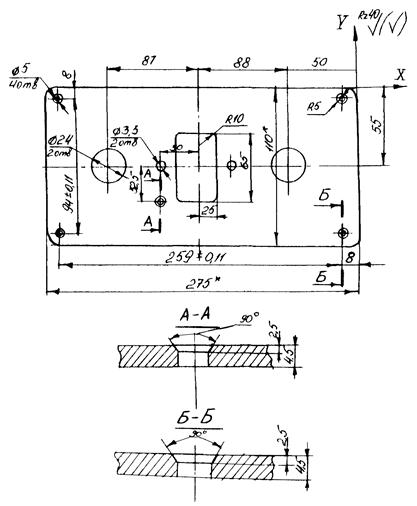
Рис. 28. Чертеж плиты АСК-12
Строка 7 - Задается код системы ПУ ’Н33-1М’
Строка 8 - Задается код постпроцессора ’703’
Строка 9 - Задается код крепежного приспособления ’УСП’, наименование крепежного приспособления ’ПИ1202500’
Строка 10 - Задается номер управляющей программы ’1110.10.1’
Строка 11 - Задается код автора ’ПЕТРОВ’
Строка 12 - Задается начало координат 0, 0, 0 в системе координат детали
Строка 13 - Задается точка Т1 с координатами Х = -138, Y = -55, Z = 0 в системе координат детали
Строка 14 - Задается точка Т2 с координатами Х = -138, Y = -87,5, Z = 0 в системе координат детали
Строка 15 - Задается прямая 1 Y = -87,5, параллельная оси X
Строка 16 - Задается окружность - КР2 центром X = -153, Y = -77,5 и радиусом R = 10 с обходом по часовой стрелке
Строка 17 - Задается прямая 3 Х = -163, параллельная оси Y
Строка 18 - Задается точка Т3 с координатами Х = -163, Y = -56, Z = 0 в системе координат детали
Строка 19 - задается контур КОНТ1 двумя прямыми 1, 3, окружностью - КР2 и двумя точками; Т2 - начальной точкой и Т3 - конечной точкой контура
Строка 20 - Задается контур КОНТ2 - зеркальное отображение контура КОНТ1 относительно прямой Пр30
Строка 21 - Задается прямая Пр30 Y = -55, параллельная оси X
Строка 22 - Задается контур КОНТ3, объединяющий контура КОНТ1 и КОНТ2
Строка 23 - Задается контур КОНТ4, зеркальное отображение КОНТ3 относительно прямой Пр31
Строка 24 - Задается контур КОНТ5, объединяющий контуры КОНТ3 и КОHT4
Строка 25 - Задается код технологическим фразы ’ФРК1’, описание технологической фразы: 10,5, НЕД15, 7,5 (КОНТ5): СПР5; задается инструмент, действующий в данной технологической фразе: 1/Д10, L/00; задаются корректоры по длине L 200 : 250 : 300
Строка 26 - Задается номер операции ’10’, наименование операции ’СВЕРЛИЛЬНАЯ’
Строка 27 - Задается модель оборудования ’2Р135Ф2’, наименование оборудования ’СВЕРЛИЛЬНЫЙ’
Строка 28 - Задается код системы УП ’КС-70’
Строка 29 - Задается код постпроцессора ’710’
Строка 30 - Задается код крепежного приспособления ’ТИСКИ’, наименование крепежного приспособлении ’Т150’
Строка 31 - Задается номер технологического установа данной операции: УСТАНОВ: 1
Строка 32 - Задается номер управляющей программы ’1110.11.5’
Строка 33 - Задается начало координат 0, 0, 0 в системе координат детали
Строка 34 - Задается система точек СТ1 на прямой, проходящей через точку с координатами Х = -50, Y = 55, Z = 0 в системе координат детали под углом 180° к положительному направлению оси 0Х. Первая точка имеет координаты (-50, 55, 0). Следующая точка получается прибавлением шага Ш175 мм. СТ1 состоит из двух точек.
Строка 35 - Задаются: код технологической фразы: CТ1, описание технологической фразы - СТ1/17; инструмент, действующий в данной технологической фразе 2/Д24, 1200; корректоры по длине 12 : 800 : 1000. Обрабатываются два отверстия, положение осей которых определяется системой точек СТ1, на глубину 17 мм
Строка 36 - Задается система точек СТ2, состоящая из двух точек на прямой, проходящей через точку Х = -8, Y = -8, Z = 0 в системе координат детали под углом 180° к положительному направлению оси 0X. Парная точка имеет координаты (-8; 8; 0). Вторая точка получается прибавлением шага Ш259 мм.
Строка 37 - Задается система точек СТ3, состоящая из двух точек на прямой, проходящей через точку Х = -8; Y = -8; Z = 0 в системе координат детали под углом 270° к положительному направлению оси 0Х. Первая точка имеет координаты (-8; -8; 0), вторая получается прибавлением шага Ш94 мм
Строка 38 - Задается система точек СТ4 на РАМЕ, положение узлов которой определяется системами точек СТ2 и СТ3
Строка 39 - Описание способа задания аналогично строке 35. Обрабатывается четыре отверстия, положение осей которых определяется системой точек СТ4. Каждое отверстие имеет одну цилиндрическую ступень. Глубина отверстия 13,5 мм.
Строка 40 - Задается точка Т4 с координатами Х = -168, Y = -87,5, Z = 0 в системе координат детали
Строка 41 - Обрабатывается одно отверстие, положение оси которого определяется точкой Т4. Отверстие имеет одну цилиндрическую ступень. Глубина отверстия 12 мм
Строка 42 - Задается система точек СТ5, состоящая из двух точек на прямой, проходящей через точку X = -168, Y = -55, Z = 0 в системе координат детали под углом 0° к положительному направлению оси 0X. Первая точка имеет координаты (-168; -55; 0). Вторая точка получается прибавлением шага Ш60 мм
Строки 43 + 52 - обрабатывается два отверстия, положение осей которых определяется системой точек СТ5. Каждое отверстие глубиной 10 мм имеет одну цилиндрическую ступень. Обработка - последовательно инструментами Æ 3,3, Æ 3,5, Æ 4,2, Æ 5, Æ 7, Æ 8, Æ 9, Æ 10, Æ 6, Æ 6,2
Строка 53 - Задается прямая Пр31 Х = -138, параллельная оси Y.
Строка 54 - Задается номер технологического установа данной операции: УСТАНОВ: 2
Строка 55 - Задается номер управляющей программы ’1110.11.61’
Строка 56 - Задается начало координат в системе координат детали 0, 0, 0
Строка 57 - Обрабатываются четыре отверстия, положение осей которых определяет система точек СТ4. Каждое отверстие глубиной 8,2 мм имеет два цилиндрические ступени
Строка 58 - Обрабатывается одно отверстие, положение оси которого определяет точка Т4. Отверстие глубиной 7,6 мм имеет две цилиндрические ступени.
Исходная программа

Исходная программа (продолжение)

|
ПОДПИСЬ И ДАТА |
ВЗАИМ. ИН. 11 |
ИНВ. 11 ДУБЛ. |
ПОДПИСЬ И ДАТА |
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
МАРШРУТНАЯ КАРТА |
АСК-12 |
КТ1 |
|||||||||||||||||
|
ПЛИТА |
ЛИТЕРА |
|
|
|
|
|
||||||||||||||
|
МАТЕРИАЛ |
КОД ЕДИН. ВЕЛИЧ. |
МАССА ДЕТАЛИ |
ЗАГОТОВКА |
ЕДИН. НОРМИР. |
НОРМА РАСХОДА |
КОЭФ. ИСПОЛЬЗОВ. |
||||||||||||||
|
КОД И ВИД |
ПРОФИЛЬ И РАЗМЕРЫ |
КОЛ. ДЕТ. |
МАССА |
|||||||||||||||||
|
НАИМЕНОВАНИЕ, МАРКА |
КОД |
|||||||||||||||||||
|
СЧ21-40 |
|
КГ |
|
ЛИТЬЕ |
500, 300, 400 |
0 |
0 |
|
|
|
|
|||||||||
|
НОМЕР |
НАИМЕНОВАНИЕ И СОДЕРЖАНИЕ ОПЕРАЦИИ |
ОБОРУДОВАНИЕ (КОД, НАИМЕНОВАНИЕ, ИНВЕНТАРНЫЙ НОМЕР) |
ПРИСПОСОБЛЕНИЕ И ИНСТРУМЕНТ (КОД, НАИМЕНОВАНИЕ) |
КОЭФ. ШТ. ВРЕМ. |
КОЛ. РАБ. |
КОД ТАР. СЕТКИ |
ОБЪЕМ ПРОИЗВОДСТ. ПАРТИИ |
ТП. З |
||||||||||||
|
ЦЕХ |
УЧ. |
ОП. |
||||||||||||||||||
|
КОД ПРОФ. |
РАЗ. РАБ. |
ЕД. НОР. |
Т. ШТ |
|||||||||||||||||
|
|
|
5. |
ФРЕЗЕРНАЯ |
6520Ф3 |
УСП |
|
|
|
|
0,0 |
||||||||||
|
|
ФРЕЗЕРОВАТЬ КОНТУР ОКОНЧАТ. |
Н33-1М |
ПИ1202500 |
|
|
|
0,9 |
|||||||||||||
|
ФРЕЗЕРНЫЙ |
|
|||||||||||||||||||
|
|
БЕЗ КОДА |
|||||||||||||||||||
|
ФРЕЗА КОНЦЕВАЯ |
||||||||||||||||||||
|
10. |
СВЕРЛИЛЬНАЯ |
2Р135Ф2 |
ТИСКИ |
|
|
|
10,0 |
|||||||||||||
|
|
ЗЕНКОВАТЬ ФАСКУ В ОТВЕРСТИЯХ |
КС-7С |
Т1 50 |
|
|
|
17,2 |
|||||||||||||
|
СВЕРЛИЛЬНЫЙ |
||||||||||||||||||||
|
27Р135 |
||||||||||||||||||||
|
РАЗРАБ.: |
|
ЛИСТ |
||||||||||||||||||
|
||||||||||||||||||||
МАРШРУТНАЯ КАРТА
Карта наладки станка
Управляющая программа
|
ГОСТ 3.1404-86 форма 5
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
1 |
|
|
|
|
|
|
|||
|
НПО ЭНИМС |
’ASK-12’, ’РШТА’ |
|
0221307.71.046 |
|||||||||
|
|
||||||||||||
|
ОБОРУДОВАНИЕ, УСТРОЙСТВО ЧПУ |
ОСОБЫЕ УКАЗАНИЯ |
|||||||||||
|
’6520Г3’ ’Н = 33’ |
УП № 1110.10.1 |
|||||||||||
|
Н. КАДРА |
КОДИРОВАНИЕ ИНФОРМАЦИИ, СОДЕРЖАНИЕ КАДРА: |
|||||||||||
|
1 |
% |
|||||||||||
|
2 |
N001G17 |
|||||||||||
|
3 |
N002G01X + 000000F0624L117 |
|||||||||||
|
4 |
N003Y + 000000L218 |
|||||||||||
|
5 |
N004Z + 000000L416 |
|||||||||||
|
6 |
N005P0000M03 |
|||||||||||
|
7 |
N006X - 013800Y - 006750F47121600: |
|||||||||||
|
8 |
N007F0000M03 |
|||||||||||
|
9 |
N008601Z - 000300F4712 |
|||||||||||
|
10 |
N009F0000M10 |
|||||||||||
|
11 |
N010F0000M11 |
|||||||||||
|
12 |
N011G01Z - 000750F0625 |
|||||||||||
|
13 |
N012F0000M10 |
|||||||||||
|
14 |
N013Y - 001500 |
|||||||||||
|
15 |
N014X - 001500 |
|||||||||||
|
16 |
N015G02X - 000500Y + 0005001 + 000000J +000500 |
|||||||||||
|
17 |
N016G01Y + 002250 |
|||||||||||
|
18 |
N017Y + 002250 |
|||||||||||
|
19 |
N018G02X + 000500Y + 0005001 + 000500J + 000000 |
|||||||||||
|
20 |
N019G01X + 001500 |
|||||||||||
|
21 |
N020X + 001500 |
|||||||||||
|
22 |
N021G02X + 000500Y - 0005001 + 000000J + 000500 |
|||||||||||
|
23 |
N022G01Y - 002250 |
|||||||||||
|
|
|
|
РАЗРАБ. |
|
|
|
||||||
|
|
ПРОВЕРИЛ |
|||||||||||
|
Н. КОНТР |
||||||||||||
|
ККИ |
|
|
||||||||||
Управляющая программа (продолжение)
Литература
1. Костюков В.Д. Применение программно-управляемого оборудования в приборостроении. - М.: Машиностроение, 1980
2. Единая система программной документации. ГОСТ 19.001-77, ГОСТ 19.002-80 ÷ ГОСТ 19.004-80, ГОСТ 19.101-77 ÷ ГОСТ 19.103-77, ГОСТ 19.104-78 ÷ ГОСТ 19.106-78, ГОСТ 19.201-78, ГОСТ 19.202-78, ГОСТ 19.301-79, ГОСТ 19.401-78, ГОСТ 19.402-78, ГОСТ 19.403-79, ГОСТ 19.404-79, ГОСТ 19.501-78, ГОСТ 19.502-78, ГОСТ 19.503-79 ÷ ГОСТ 19.508-79, ГОСТ 19.601-78 ÷ ГОСТ 19.604-78
РАЗРАБОТАНЫ И ВНЕСЕНЫ ВНИИНМАШ Госстандарта СССР
ИСПОЛНИТЕЛИ: к.т.н. П.А. Шалаев; к.т.н. Костюков (pyкoвoдители темы); А.В. Алексеев; к.т.н. О.Н. Гротова, А.М. Евсиков; В.Н. Зерченинова; к.т.н. Ю.И. Караванов; С.Г. Королев; А.А. Лиферов; А.И. Масленников; Р.И. Петлюк; А.Н. Петухов; А.А. Петров; к.т.н. С.В. Скородумов; к.т.н. C.Р. Татур; А.В. Шиманский
УТВЕРЖДЕНЫ: Приказом ВНИИНМАШ № 72 от 22.03.1988 г.
ССЫЛОЧНЫЕ ДАННЫЕ:
|
Номер пункта, подпункта, перечисления, приложения |
|
|
РД 50-619-86 |
|
|
ГОСТ 3.1418-82 |
СОДЕРЖАНИЕ